
Non-Imaging Fall Detection Based on Spectral Signatures Obtained Using a Micro-Doppler Millimeter-Wave Radar


Abstract
:1. Introduction
2. Continuous-Wave Micro-Doppler Radar

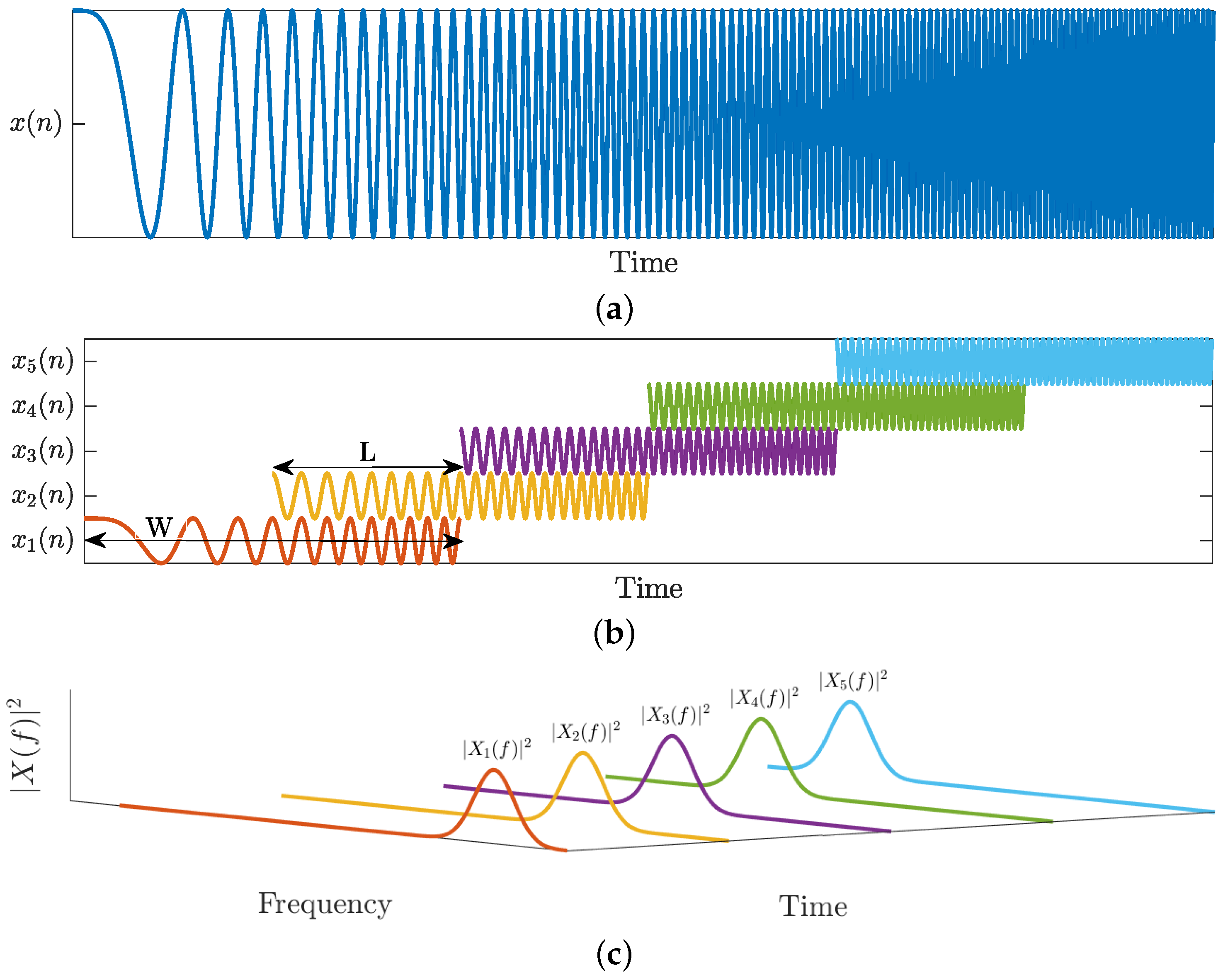
3. Creating an Optimal Spectrogram
4. CW Micro-Doppler MMW Radar
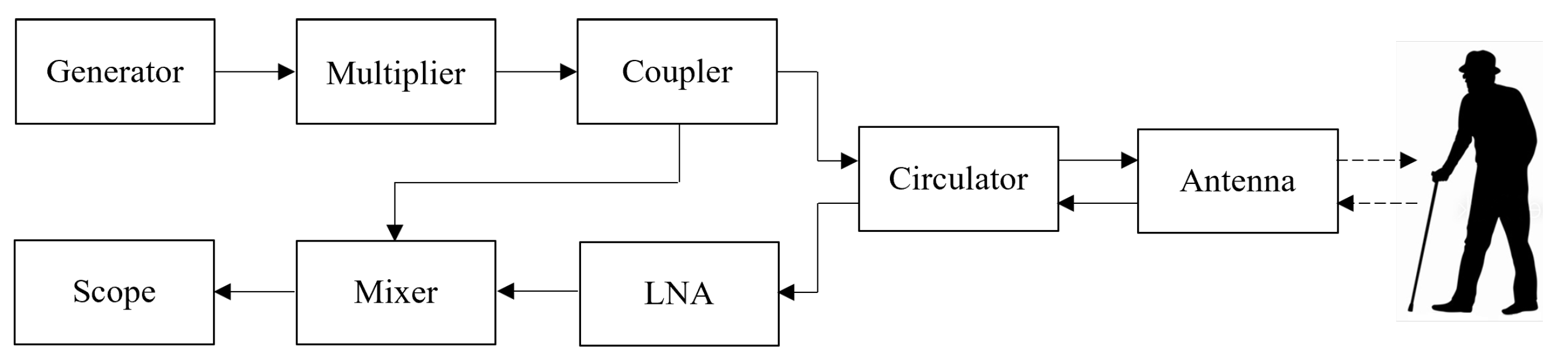
4.1. CW Micro-Doppler MMW Radar Experimental Setup
4.2. Advantages of Using MMW in Radar Fall Detection
5. Fall Detection Application
5.1. Method of Fall Detection Using Spectral Signature
5.2. Experimental Results
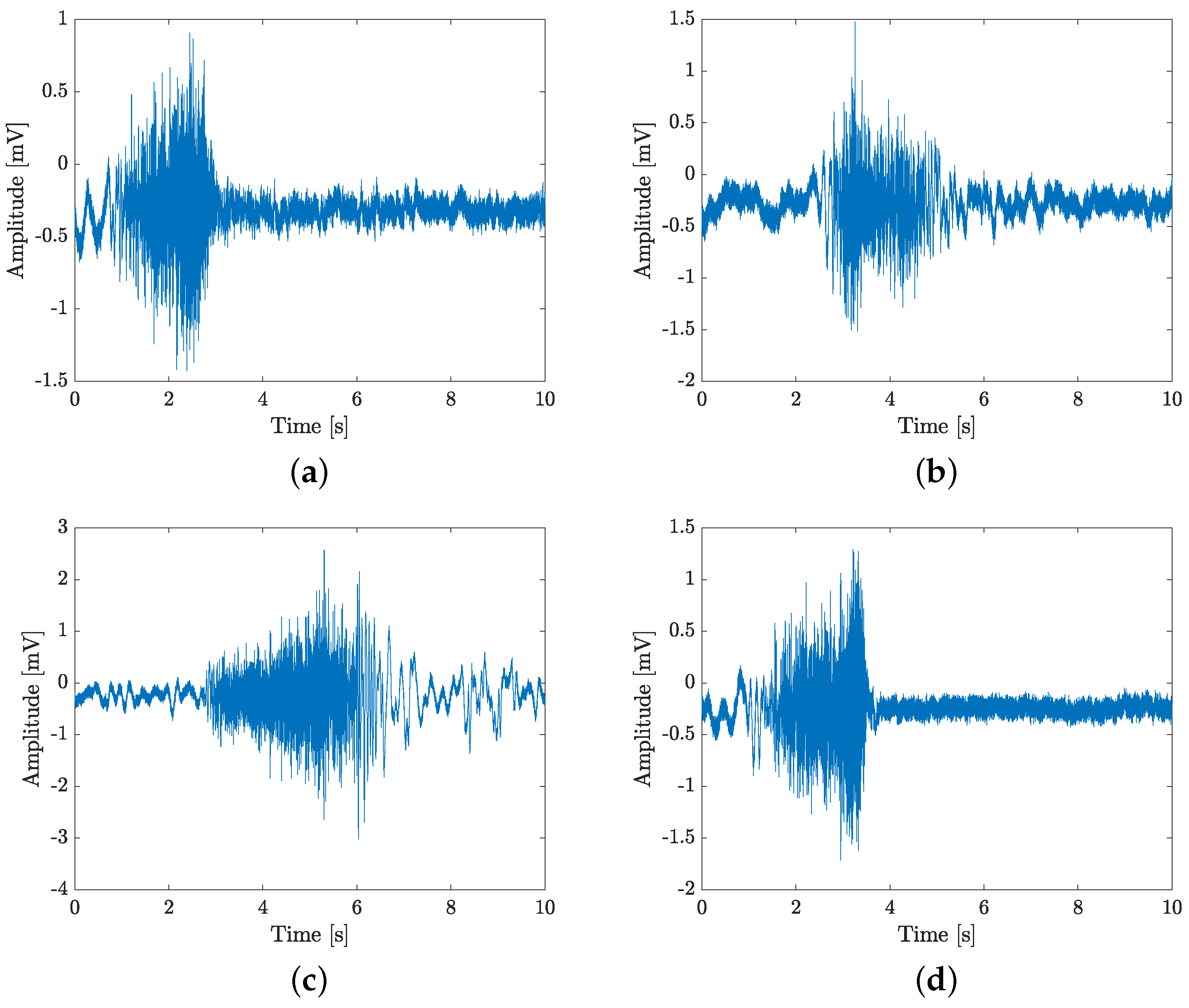
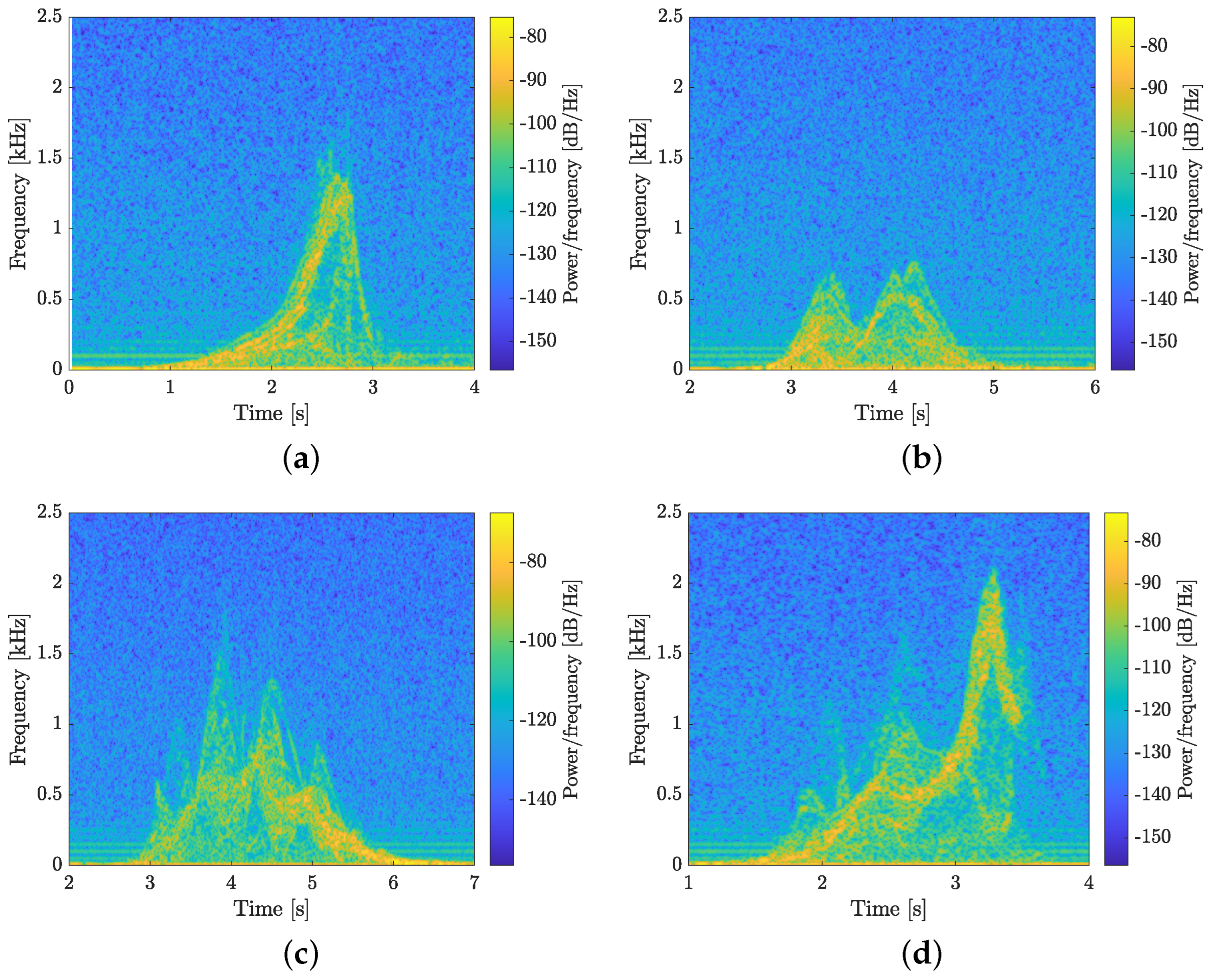
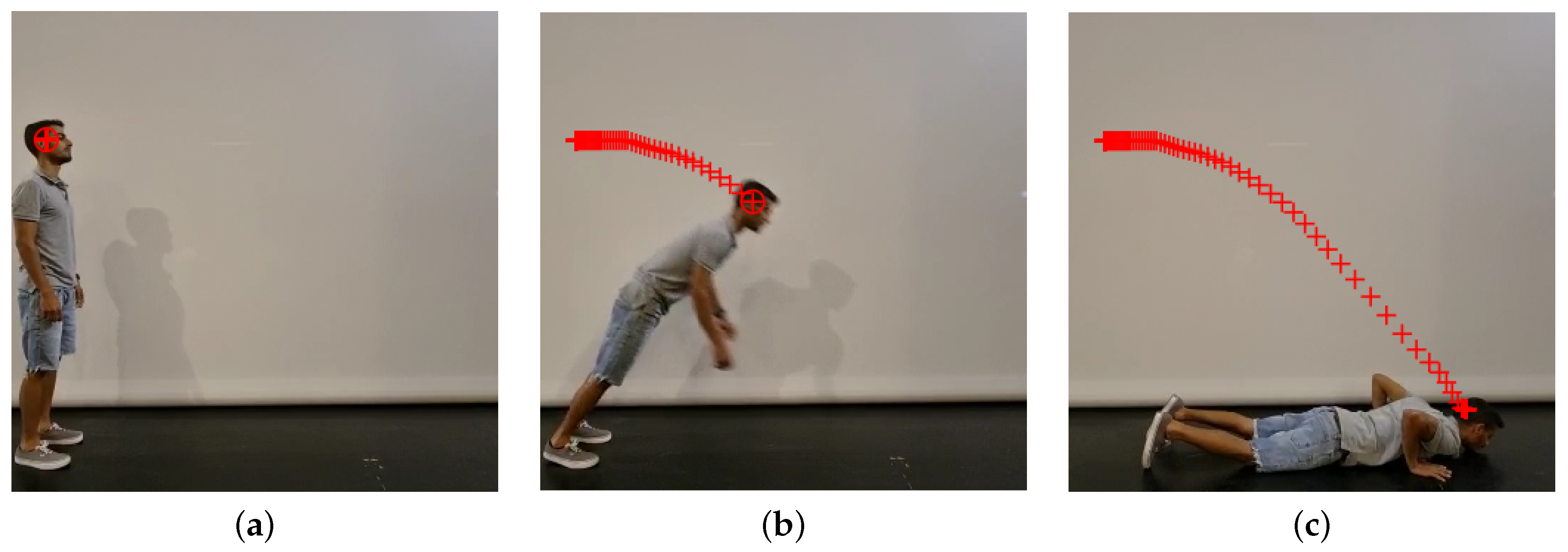
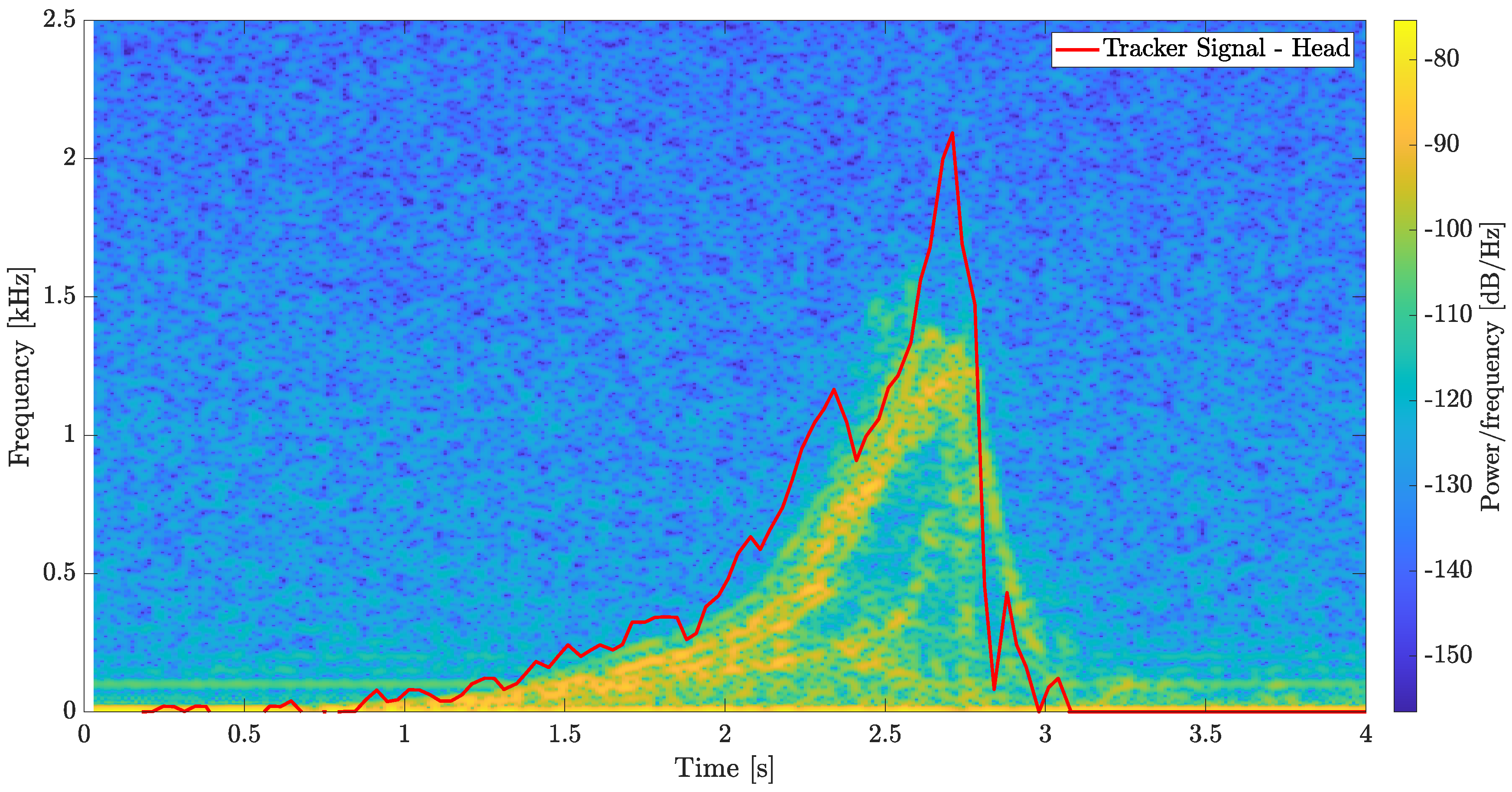
5.2.1. Falling Experiment
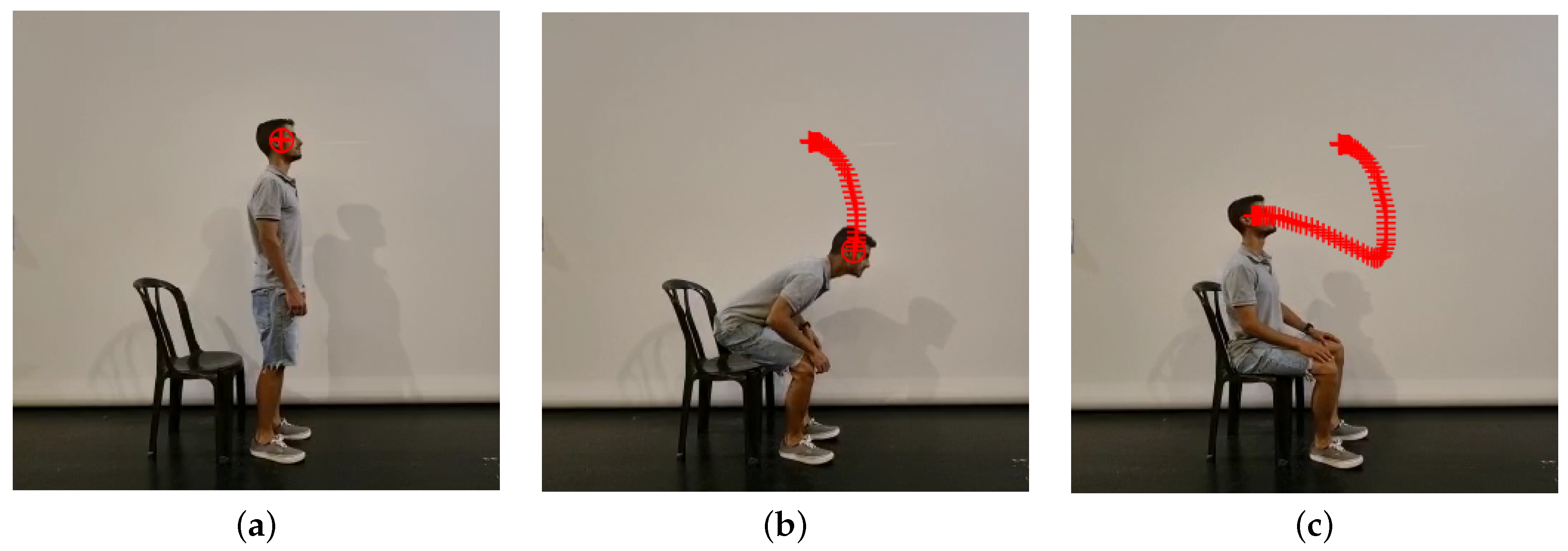
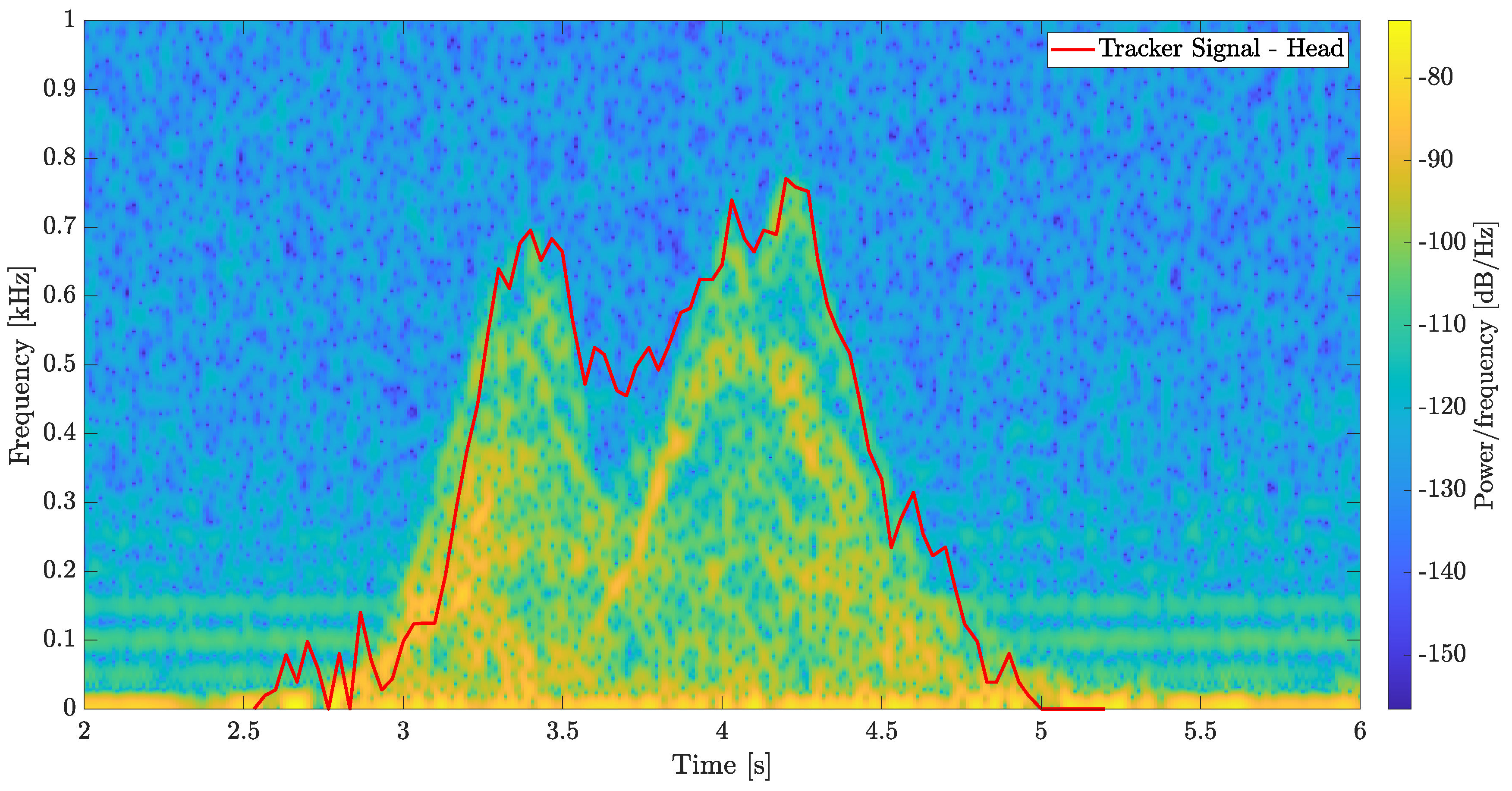
5.2.2. Sitting Experiment
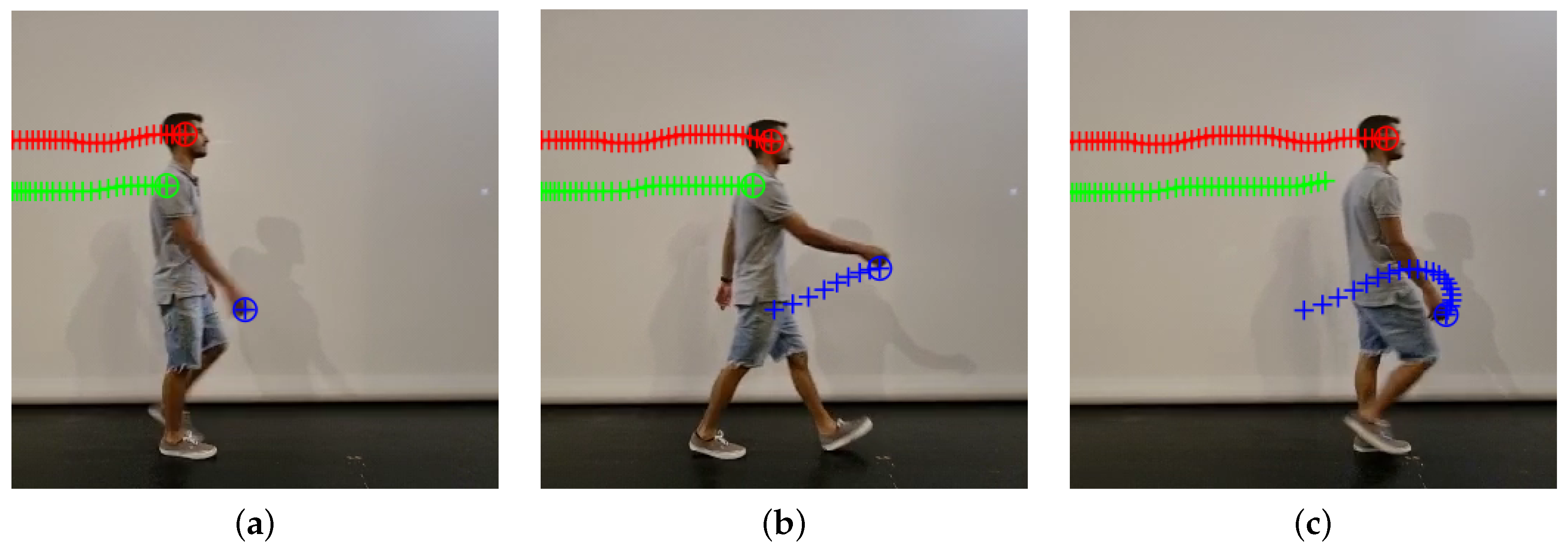
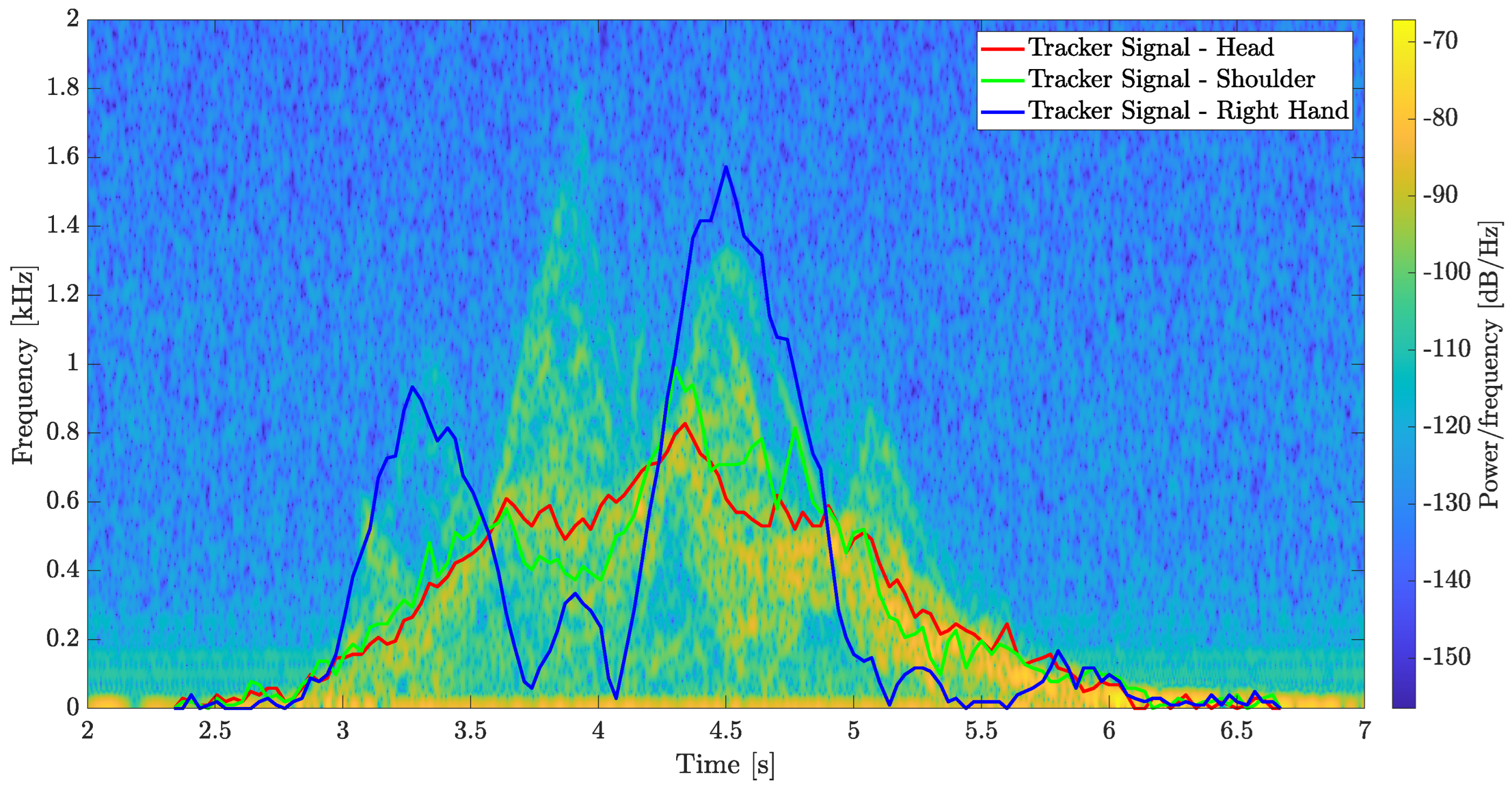
5.2.3. Walking Experiment
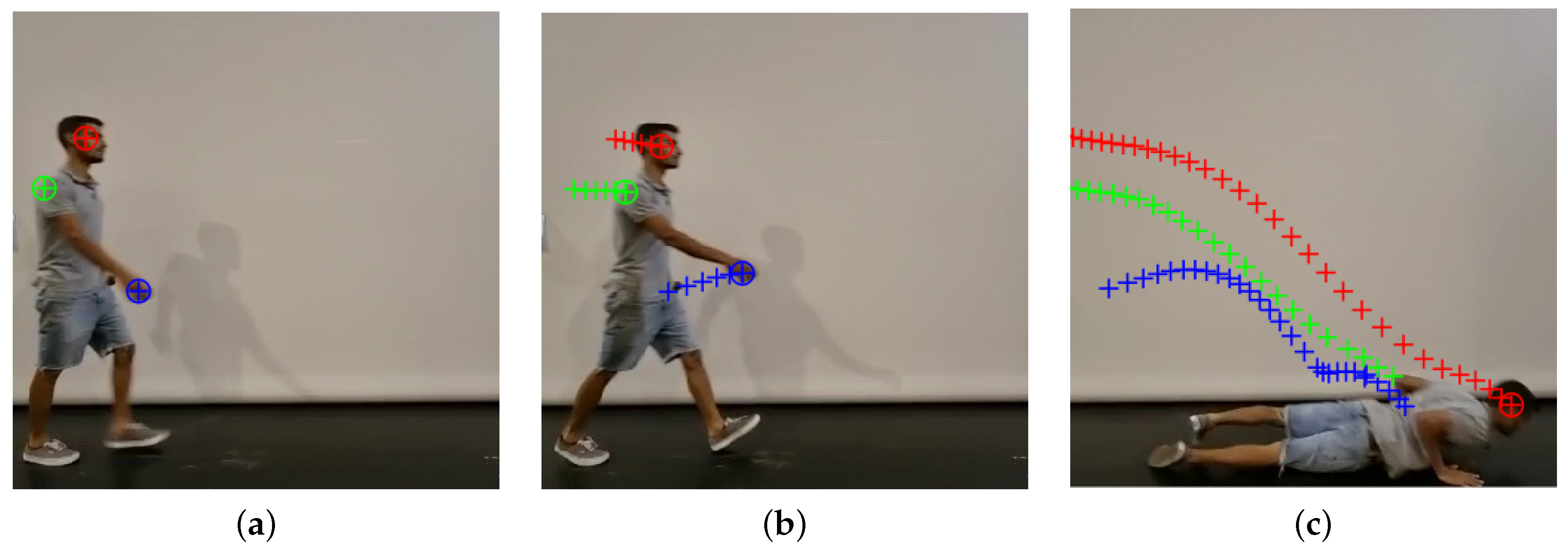
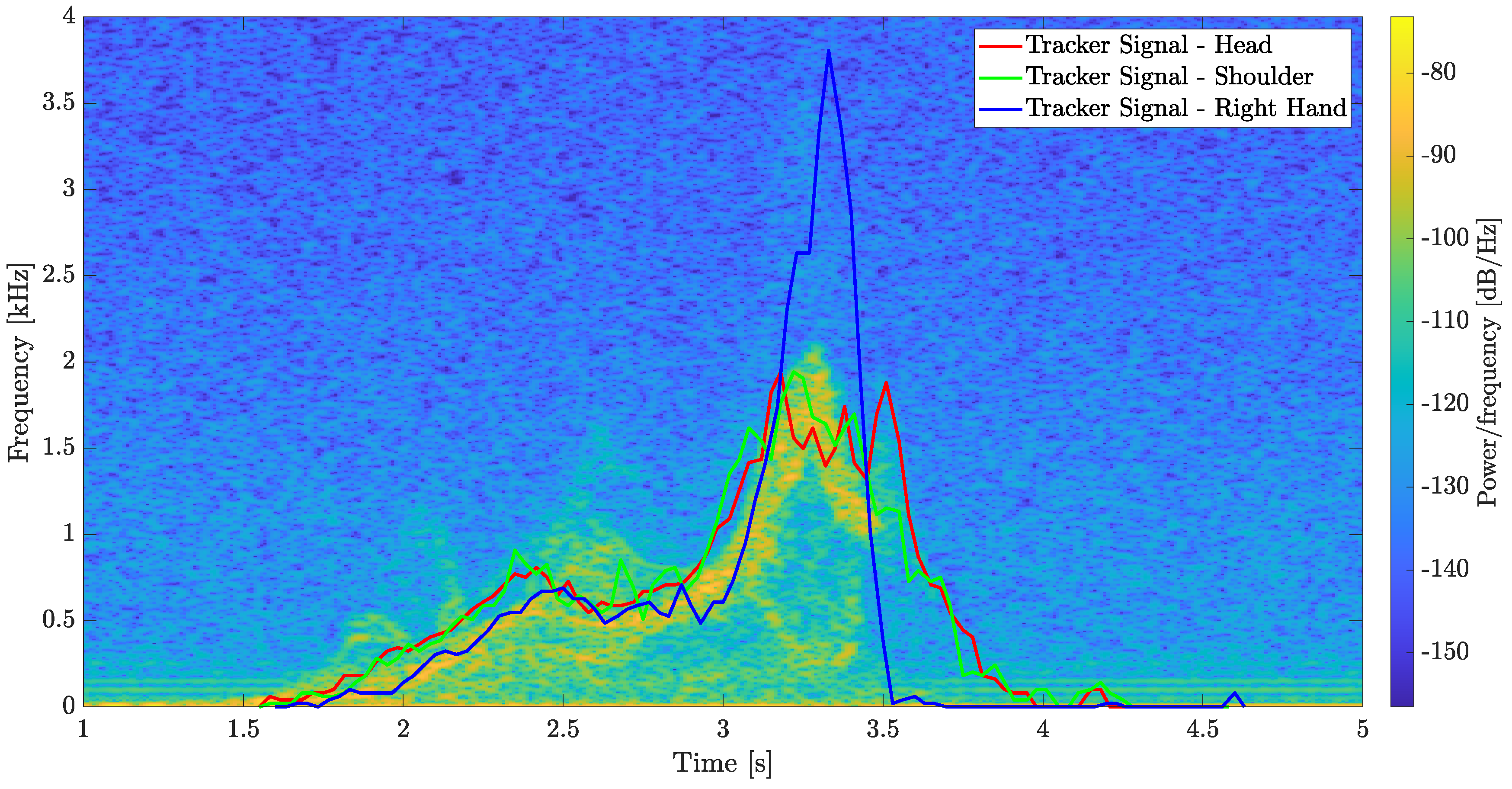
5.2.4. Falling while Walking Experiment
5.2.5. Experimental Summary Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kinsella, K. Demographic dimensions of global aging. J. Fam. Issues 2000, 21, 541–558. [Google Scholar] [CrossRef]
- Kinsella, K.G.; Phillips, D.R. Global Aging: The Challenge of Success; Population Reference Bureau: Washington, DC, USA, 2005; Volume 60. [Google Scholar]
- Fuller, G.F. Falls in the elderly. Am. Fam. Physician 2000, 61, 2159. [Google Scholar] [PubMed]
- Debard, G.; Karsmakers, P.; Deschodt, M.; Vlaeyen, E.; Dejaeger, E.; Milisen, K.; Goedemé, T.; Vanrumste, B.; Tuytelaars, T. Camera-based fall detection on real world data. In Outdoor and Large-Scale Real-World Scene Analysis; Springer: Berlin/Heidelberg, Germany, 2012; pp. 356–375. [Google Scholar]
- Casilari, E.; Oviedo-Jiménez, M.A. Automatic fall detection system based on the combined use of a smartphone and a smartwatch. PLoS ONE 2015, 10, e0140929. [Google Scholar] [CrossRef] [PubMed]
- Muro-De-La-Herran, A.; Garcia-Zapirain, B.; Mendez-Zorrilla, A. Gait analysis methods: An overview of wearable and non-wearable systems, highlighting clinical applications. Sensors 2014, 14, 3362–3394. [Google Scholar] [CrossRef] [PubMed]
- Espinosa, R.; Ponce, H.; Gutiérrez, S.; Martínez-Villaseñor, L.; Brieva, J.; Moya-Albor, E. A vision-based approach for fall detection using multiple cameras and convolutional neural networks: A case study using the UP-Fall detection dataset. Comput. Biol. Med. 2019, 115, 103520. [Google Scholar] [CrossRef] [PubMed]
- Nadee, C.; Chamnongthai, K. Ultrasonic array sensors for monitoring of human fall detection. In Proceedings of the 2015 12th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Hua Hin, Thailand, 24–27 June 2015; pp. 1–4. [Google Scholar]
- Tolkiehn, M.; Atallah, L.; Lo, B.; Yang, G.Z. Direction sensitive fall detection using a triaxial accelerometer and a barometric pressure sensor. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 369–372. [Google Scholar]
- Okumura, N.; Yamanoi, Y.; Kato, R.; Yamamura, O. Fall detection and walking estimation using floor vibration for solitary elderly people. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 1437–1442. [Google Scholar]
- Etinger, A.; Balal, N.; Litvak, B.; Einat, M.; Kapilevich, B.; Pinhasi, Y. Non-imaging MM-wave FMCW sensor for pedestrian detection. IEEE Sensors J. 2013, 14, 1232–1237. [Google Scholar] [CrossRef]
- Balal, N.; Balal, Y.; Richter, Y.; Pinhasi, Y. Detection of low RCS supersonic flying targets with a high-resolution MMW radar. Sensors 2020, 20, 3284. [Google Scholar] [CrossRef] [PubMed]
- Balal, Y.; Balal, N.; Richter, Y.; Pinhasi, Y. Time-Frequency Spectral Signature of Limb Movements and Height Estimation Using Micro-Doppler Millimeter-Wave Radar. Sensors 2020, 20, 4660. [Google Scholar] [CrossRef] [PubMed]
- Balal, N.; Richter, Y.; Pinhasi, Y. Identifying low-RCS targets using micro-Doppler high-resolution radar in the millimeter waves. In Proceedings of the 2020 14th European Conference on Antennas and Propagation (EuCAP), Copenhagen, Denmark, 15–20 March 2020; pp. 1–5. [Google Scholar]
- Yang, Y.; Hou, C.; Lang, Y.; Yue, G.; He, Y.; Xiang, W. Person identification using micro-Doppler signatures of human motions and UWB radar. IEEE Microw. Wirel. Components Lett. 2019, 29, 366–368. [Google Scholar] [CrossRef]
- Taylor, W.; Dashtipour, K.; Shah, S.A.; Hussain, A.; Abbasi, Q.H.; Imran, M.A. Radar sensing for activity classification in elderly people exploiting micro-doppler signatures using machine learning. Sensors 2021, 21, 3881. [Google Scholar] [CrossRef]
- Ahmad, F.; Amin, M.G.; Setlur, P. Through-the-wall target localization using dual-frequency CW radars. In Sensors, and Command, Control, Communications, and Intelligence (C3I) Technologies for Homeland Security and Homeland Defense V; SPIE: Orlando, FL, USA, 2006; Volume 6201, pp. 133–144. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Sensing | Cost | Algorithm Type | Motion Classification | Disadvantages | Imaging |
|---|---|---|---|---|---|
| Wearable sensors-3D accelerometer | cheap | Threshold-based | Not classified | High false rate, no remote sensing | Not imaging |
| Camera-based sensing | medium | Detection based on human skeleton, falling angle vertical projection | Classified | High computing resources to process data continuously, not portable, limited sensing area | Imaging |
| Radar-based sensing | medium | Micro-Doppler time-frequency analyze | Classified | limited sensing area | Not imaging |
| Movement Type | (kHz/s) | (s) | (kHz/s) | (s) |
|---|---|---|---|---|
| Falling | 1.042 | 1.535 | 3.764 | 0.425 |
| Sitting | 0.868 | 0.8 | 1 | 0.8 |
| Walking | 3.25 | 0.43 | 2.18 | 0.64 |
| Falling while walking | 2.37 | 0.672 | 5.86 | 0.367 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Balal, Y.; Yarimi, A.; Balal, N. Non-Imaging Fall Detection Based on Spectral Signatures Obtained Using a Micro-Doppler Millimeter-Wave Radar. Appl. Sci. 2022, 12, 8178. https://doi.org/10.3390/app12168178
Balal Y, Yarimi A, Balal N. Non-Imaging Fall Detection Based on Spectral Signatures Obtained Using a Micro-Doppler Millimeter-Wave Radar. Applied Sciences. 2022; 12(16):8178. https://doi.org/10.3390/app12168178
Chicago/Turabian StyleBalal, Yael, Afik Yarimi, and Nezah Balal. 2022. "Non-Imaging Fall Detection Based on Spectral Signatures Obtained Using a Micro-Doppler Millimeter-Wave Radar" Applied Sciences 12, no. 16: 8178. https://doi.org/10.3390/app12168178