
Computational Study of the Plasma Actuator Flow Control for an Airfoil at Pre-Stall Angles of Attack


Abstract
:1. Introduction
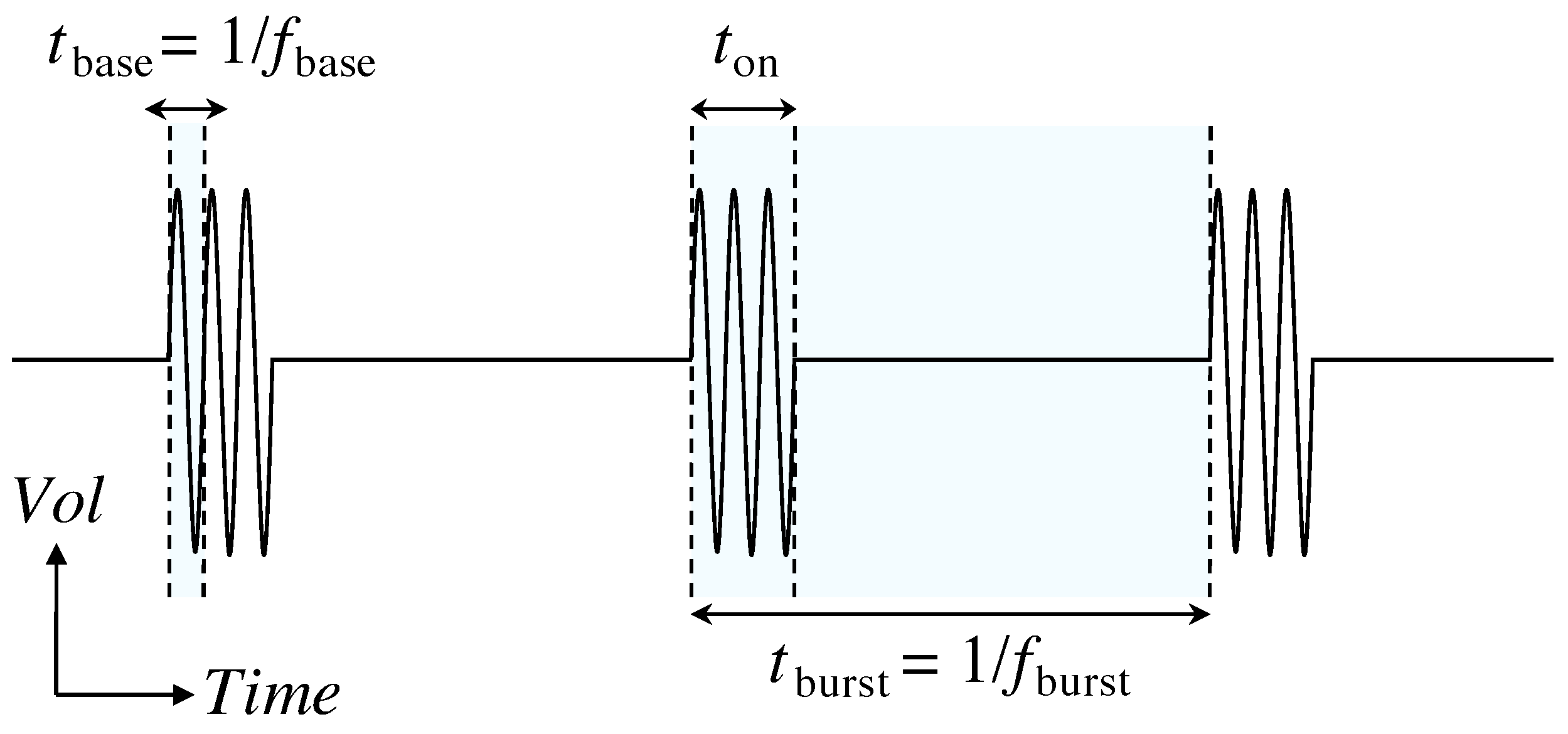
2. PA Drive Methods and Computational Cases
3. Computational Approach
3.1. Governing Equations
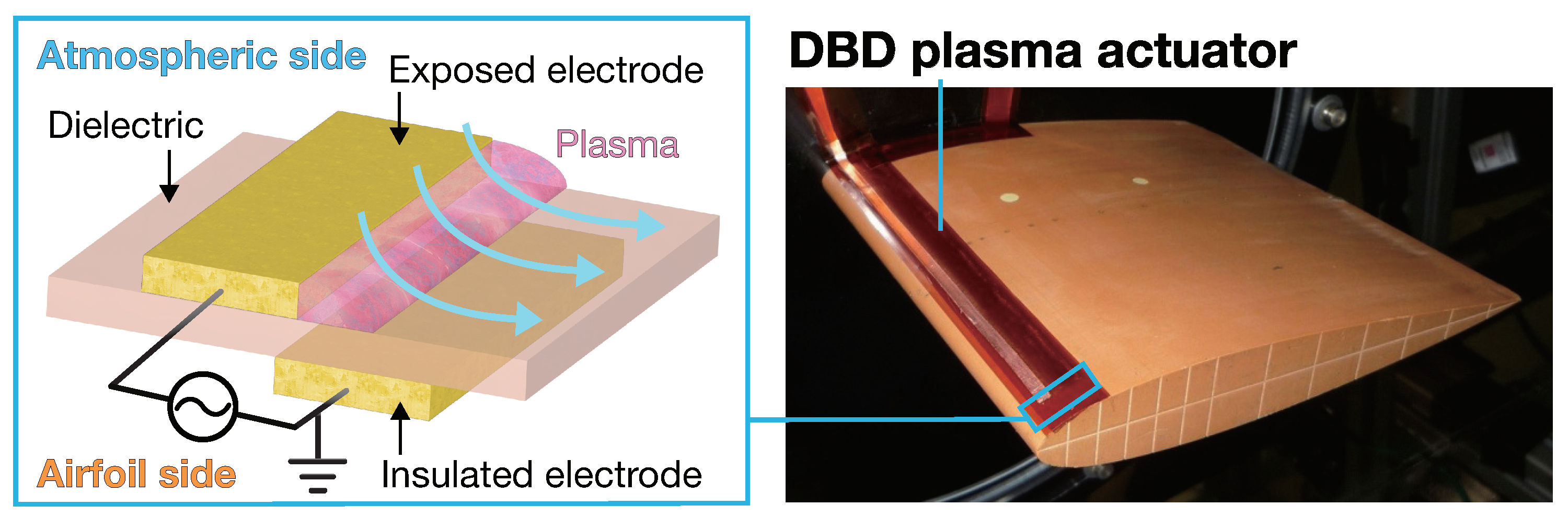
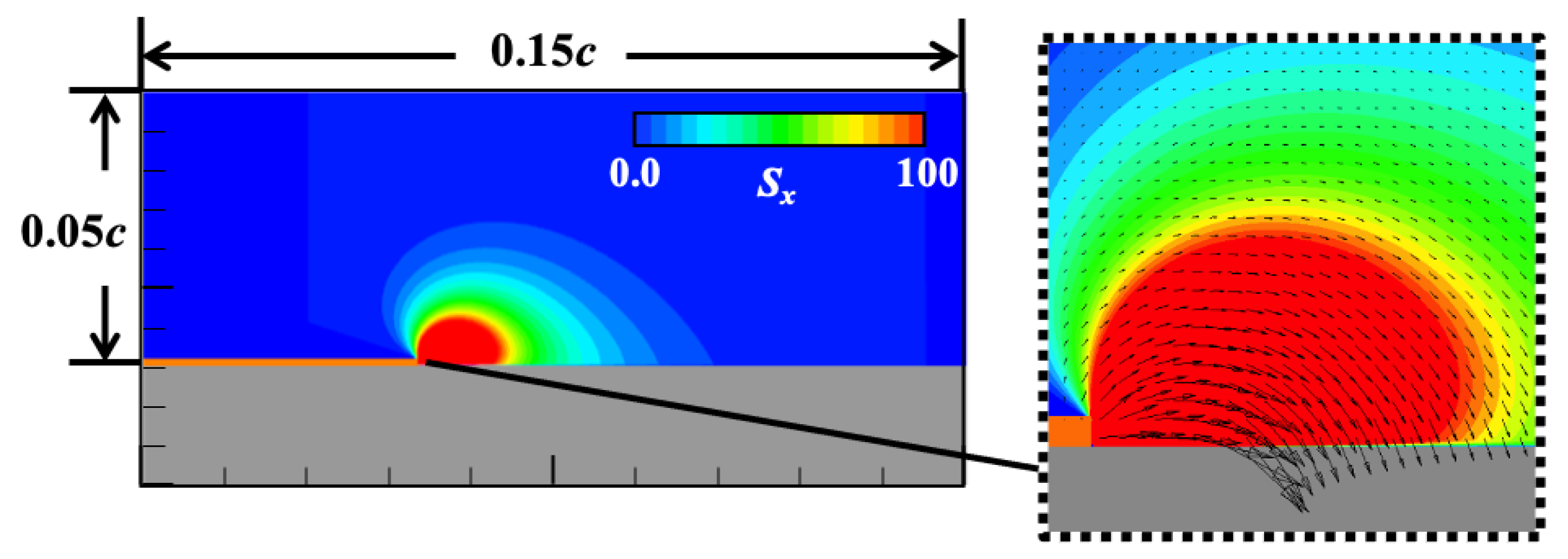
3.2. Plasma Actuator Modeling
| on outer boundaries, | , |
| on exposed electrode, | , |
| on insulated electrode, | , |
| on outer boundaries and in dielectric, | , |
| on the surface of dielectric above the insulated electrode, | , |
| on the other surface of PA, | . |
3.3. Computational Method
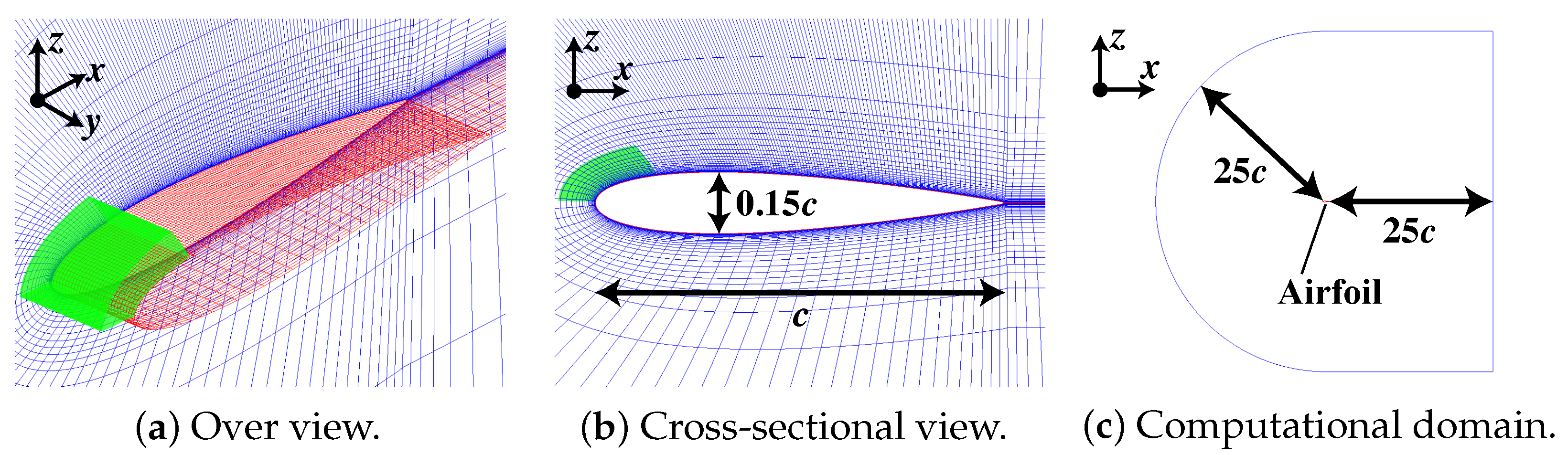
3.4. Computational Grid
4. Results and Discussion
4.1. Validation
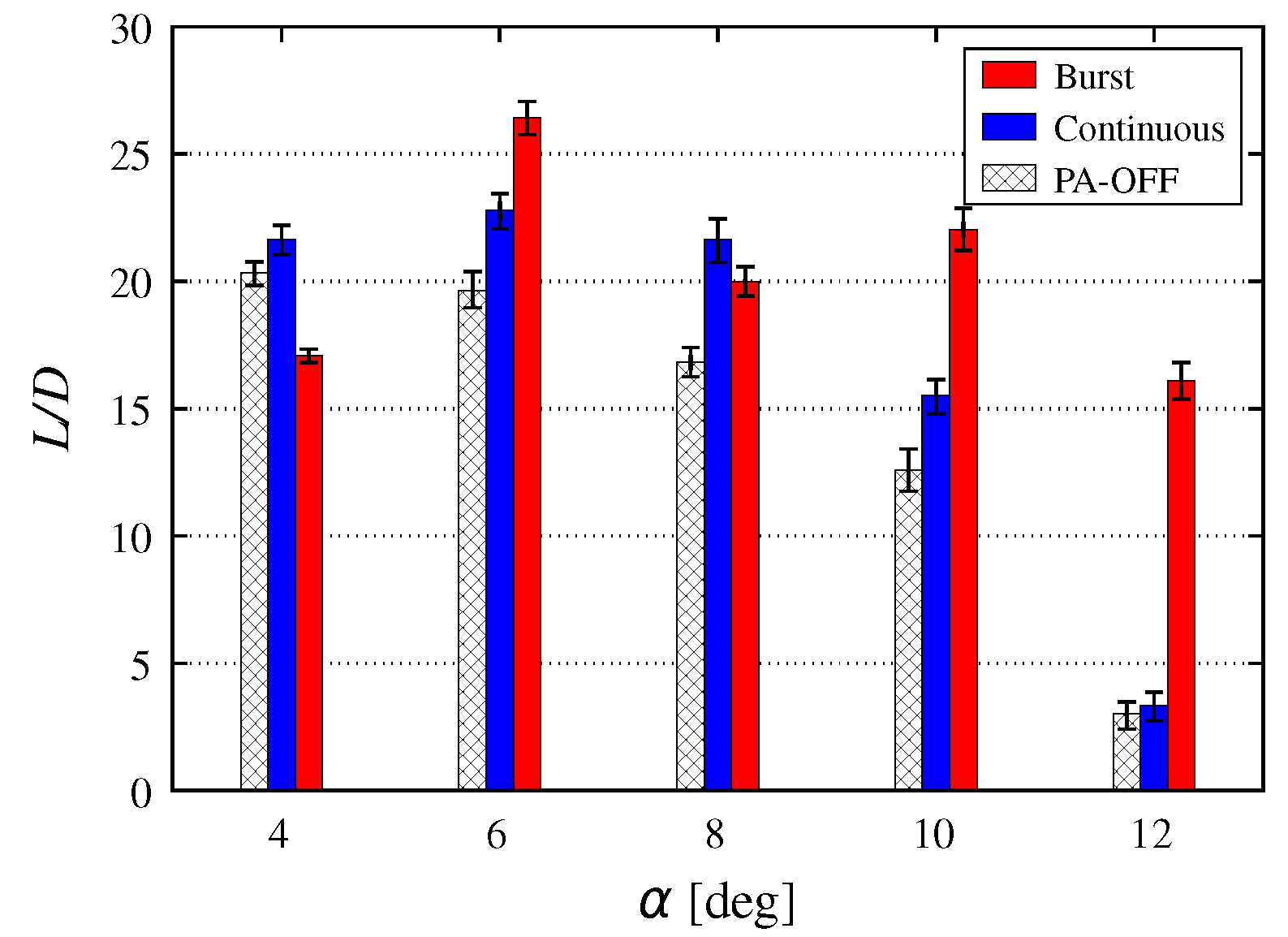
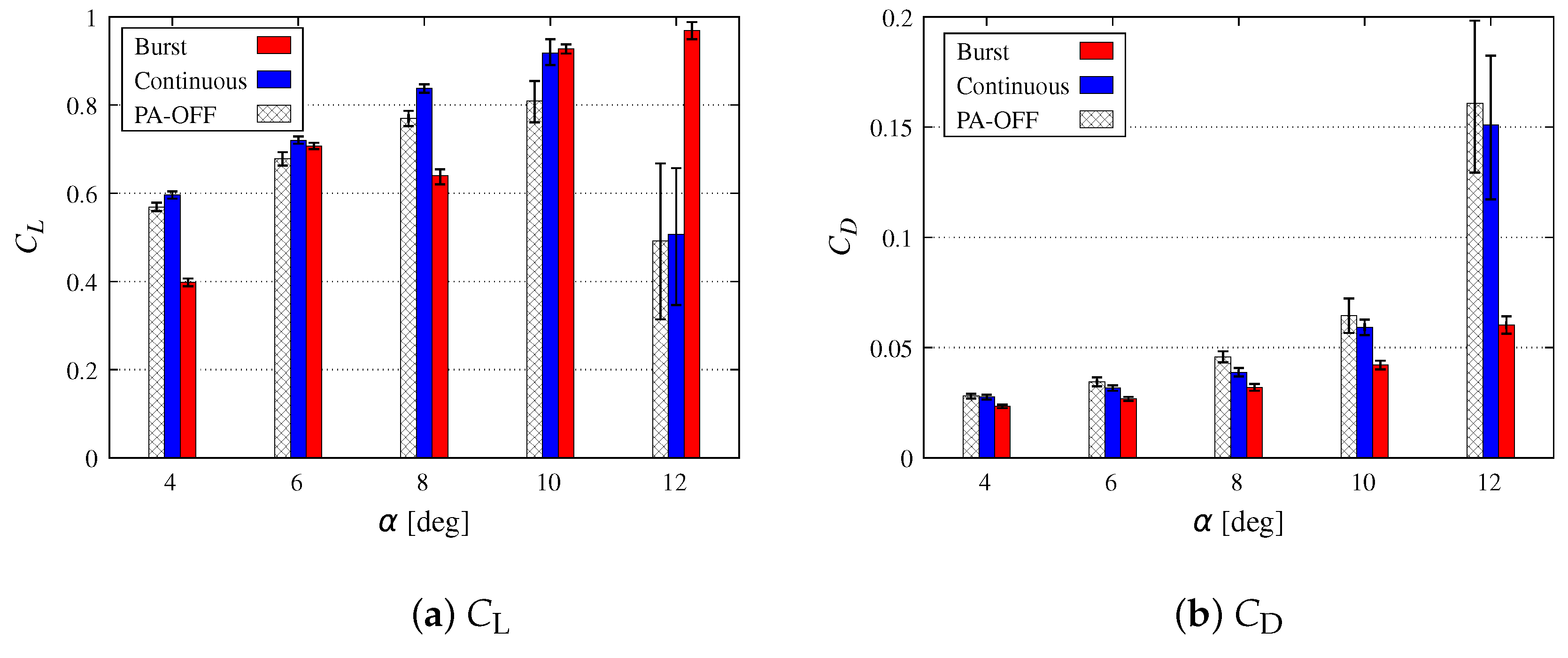
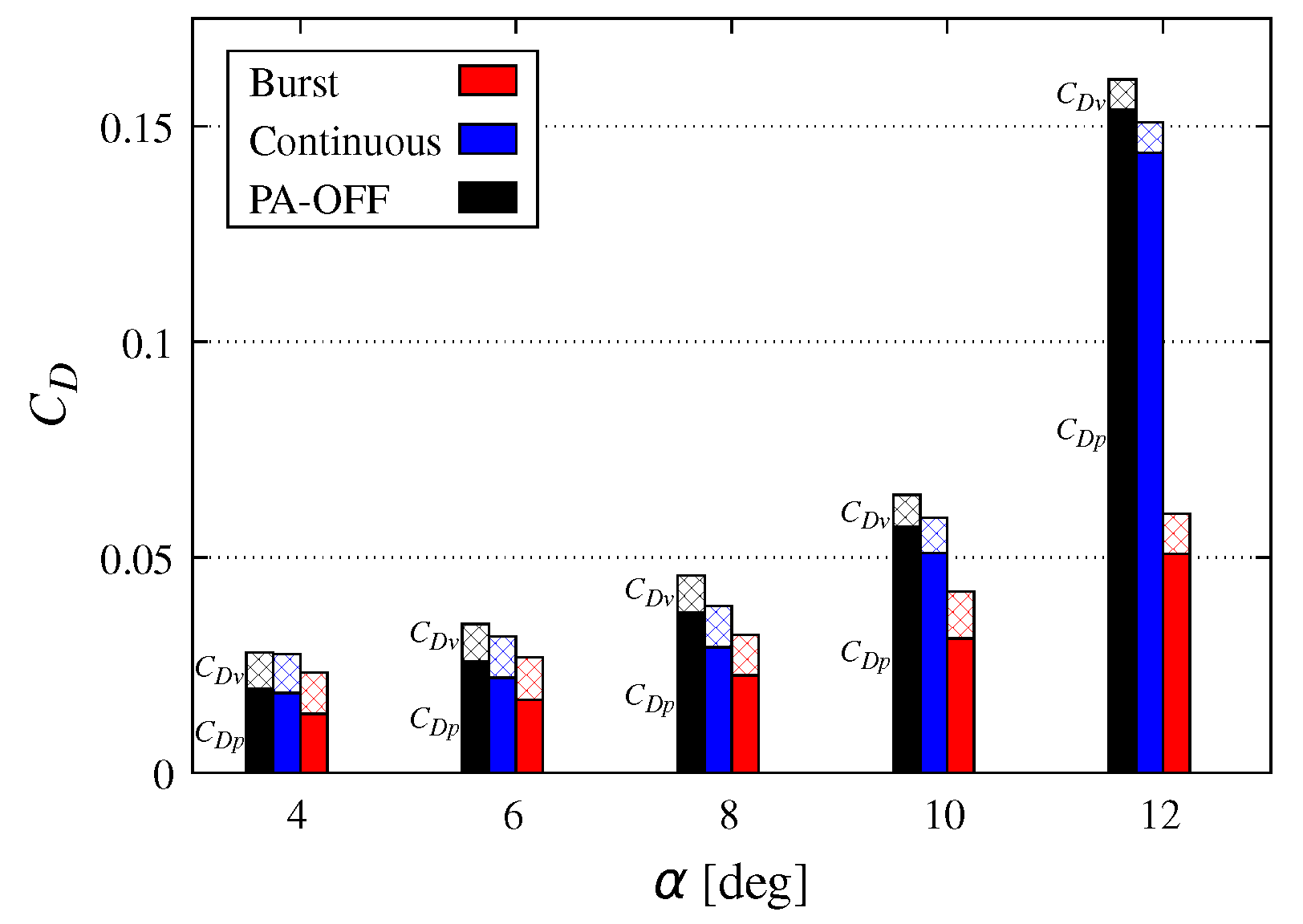
4.2. Aerodynamic Characteristics
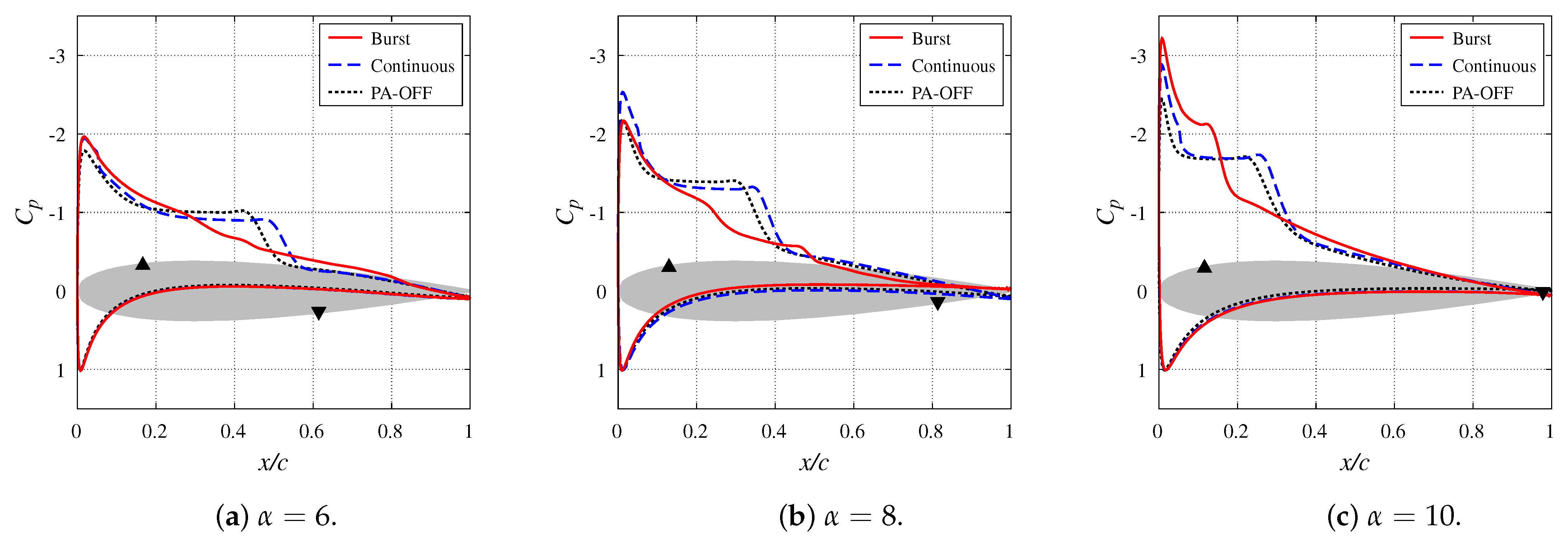
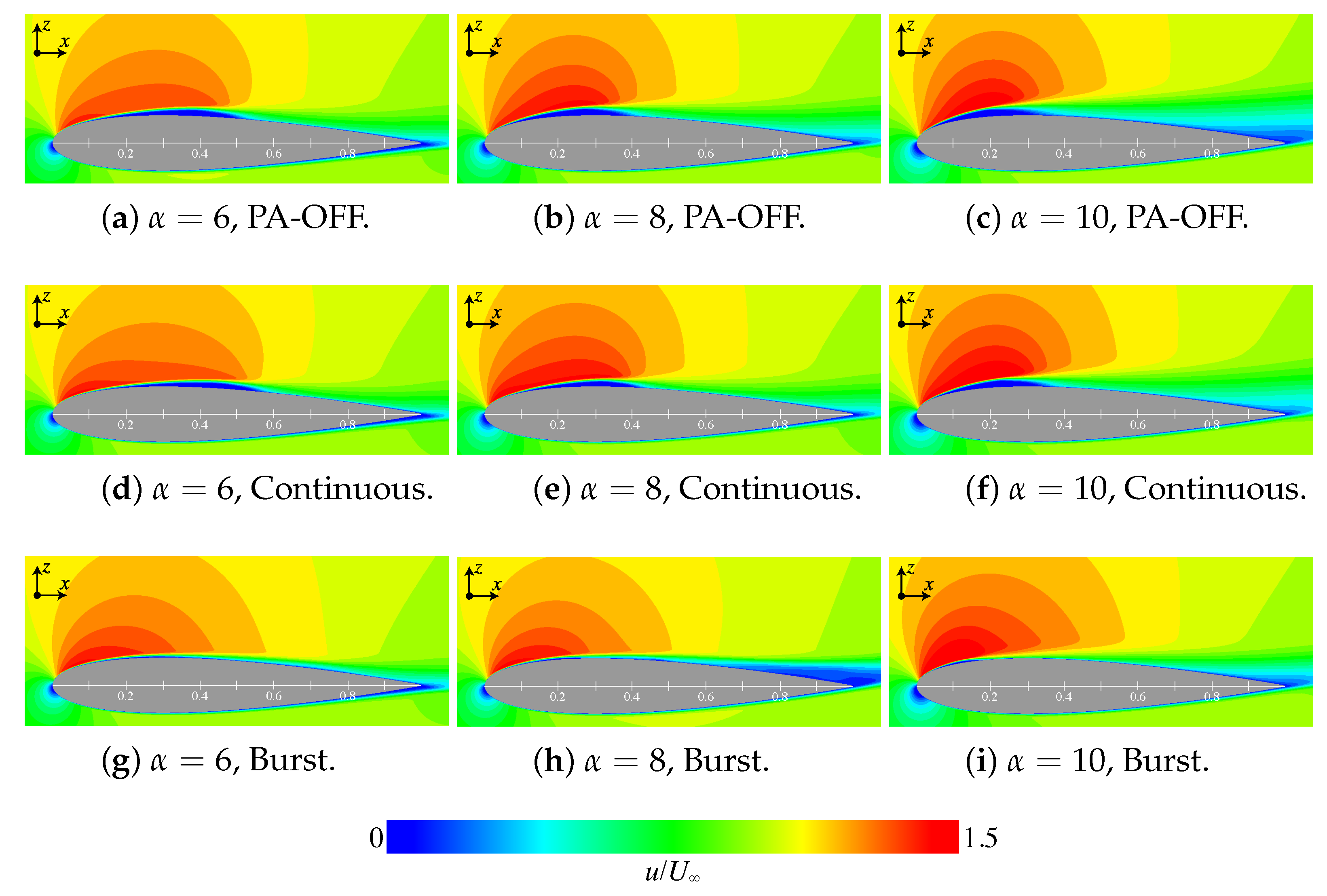
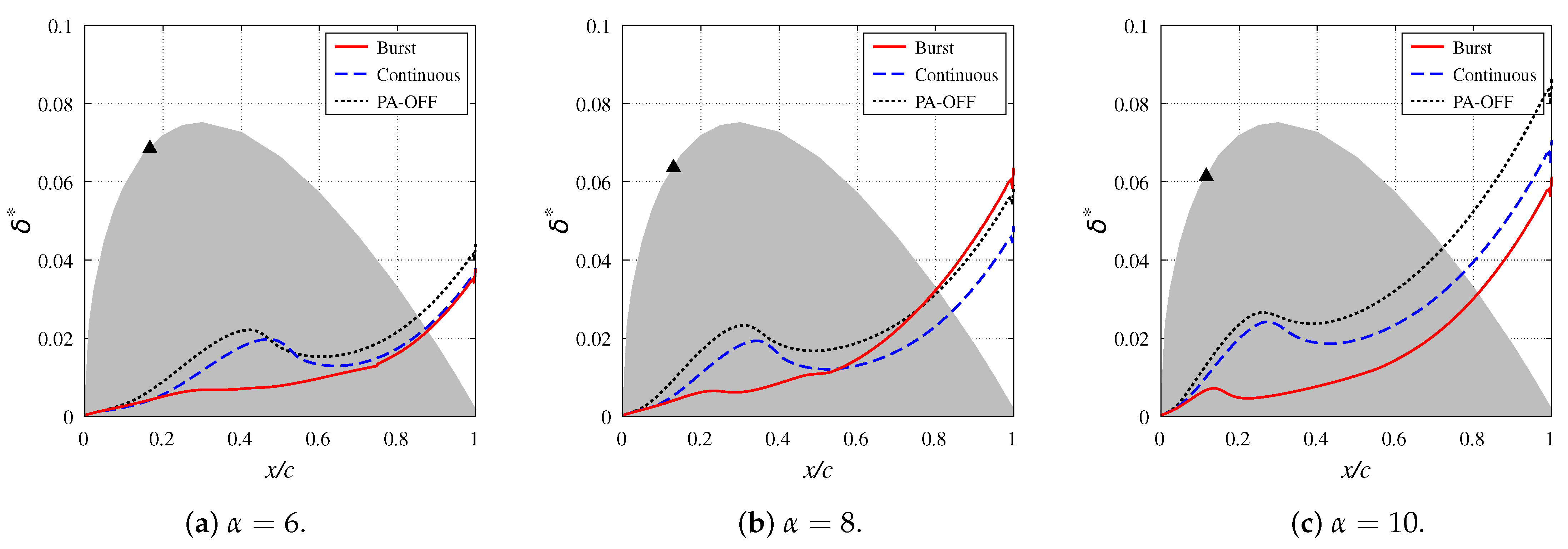
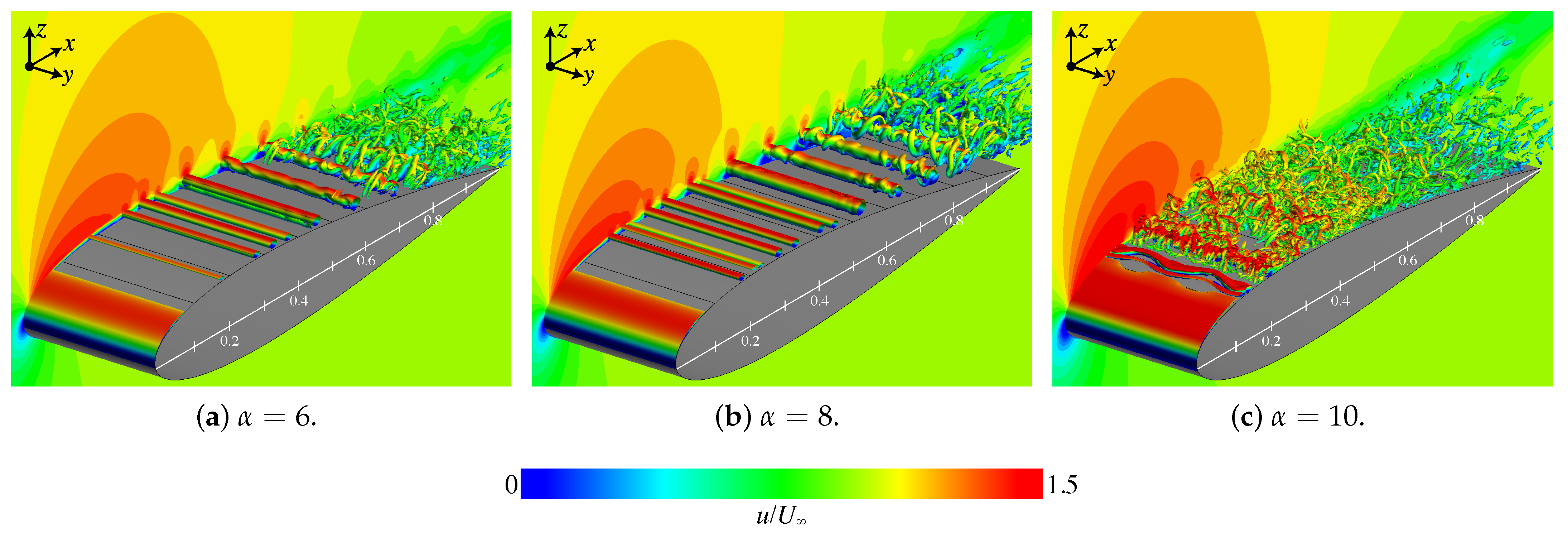
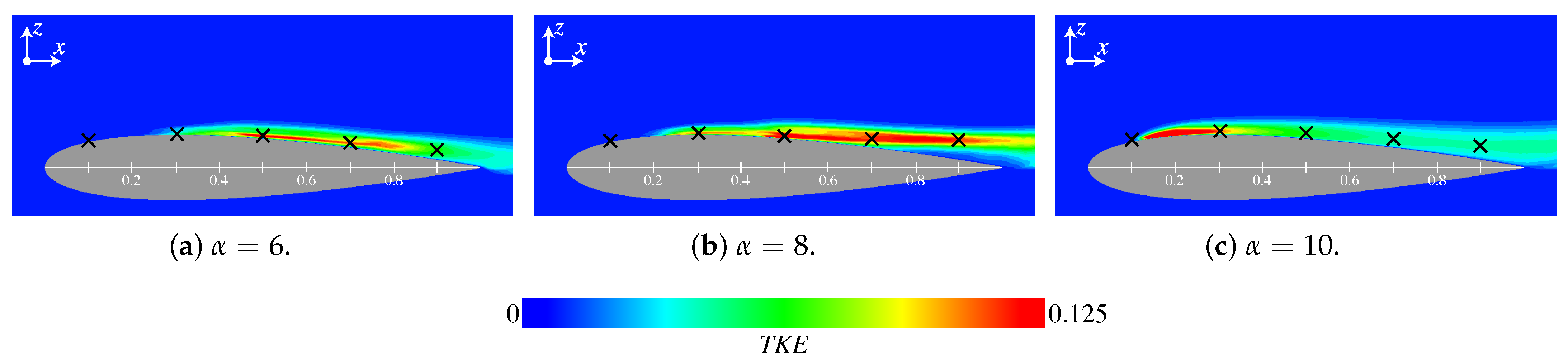
4.3. Averaged Flow Feature
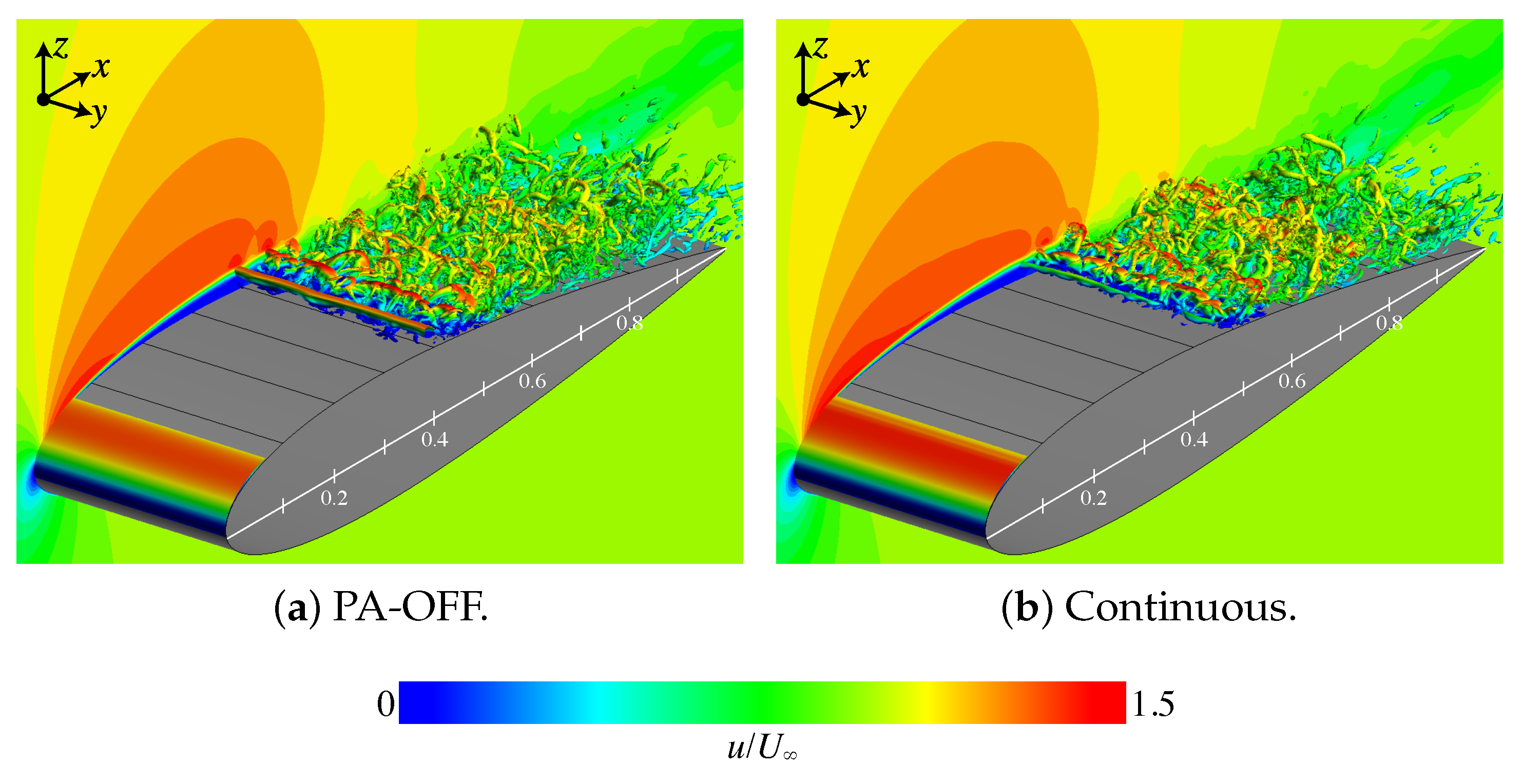
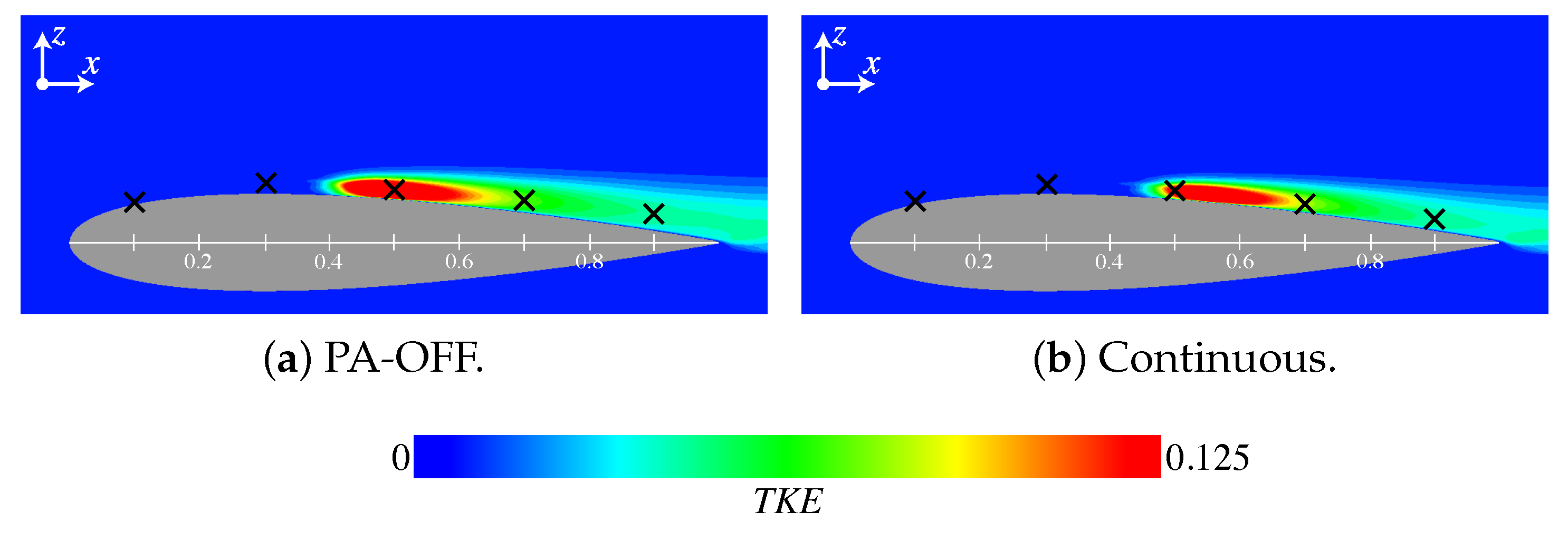
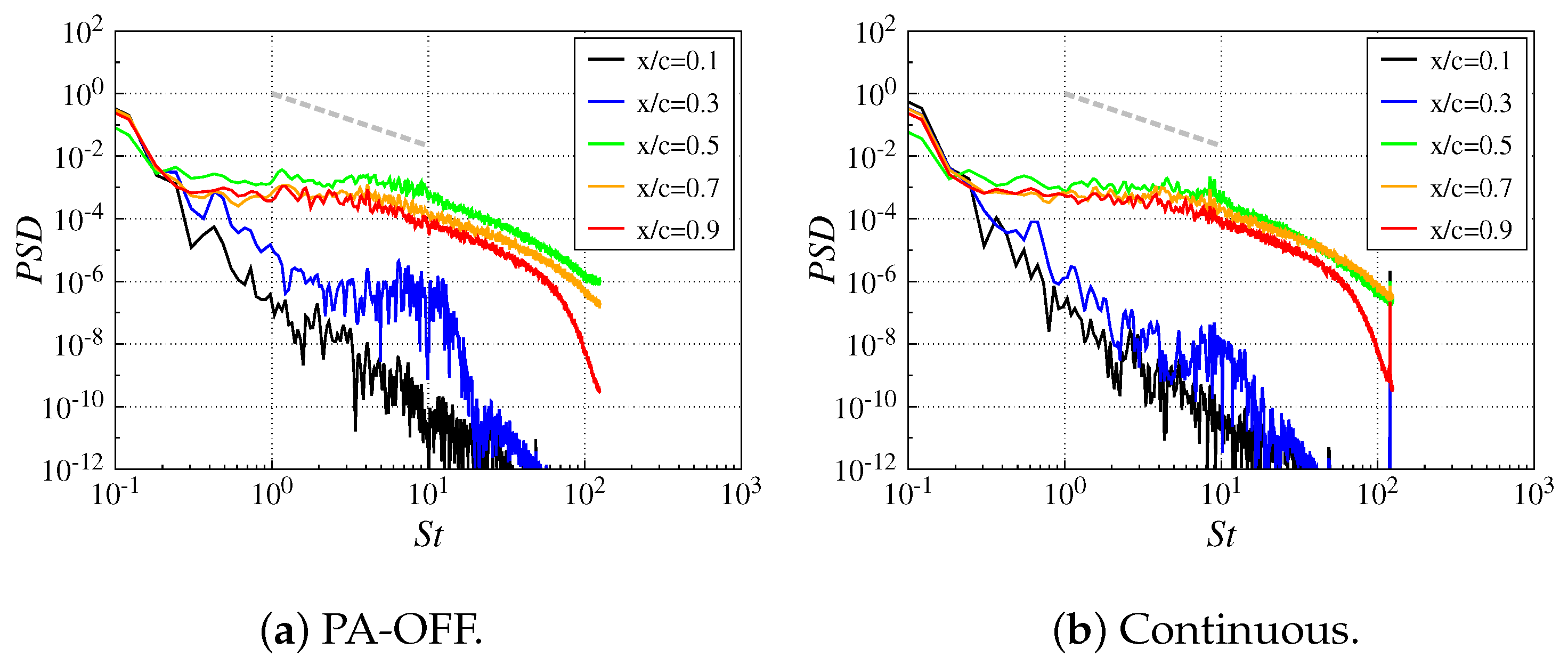
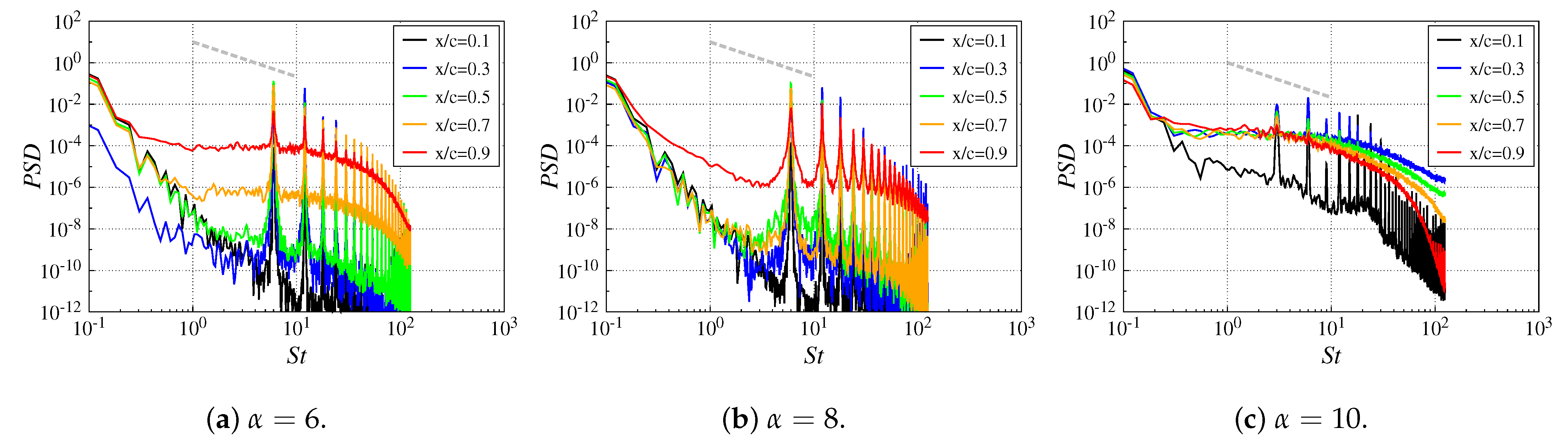
4.4. Unsteady Flow Feature
4.5. Comparison with Controlled Flow at Post-Stall Angle of Attack
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Corke, T.C.; Enloe, C.L.; Wilkinson, P.S. Dielectric Barrier Discharge Plasma Actuators for Flow Control. Annu. Rev. Fluid Mech. 2010, 42, 505–529. [Google Scholar] [CrossRef]
- Jukes, T.N.; Choi, K.S. Control of unsteady flow separation over a circular cylinder using dielectricbarrier-discharge surface plasma. Phys. Fluids 2009, 21, 094106. [Google Scholar] [CrossRef]
- Greenblatt, D.; Schneider, T.; Schuele, C.Y. Mechanism of flow separation control using plasma actuation. Phys. Fluids 2012, 24, 077102. [Google Scholar] [CrossRef]
- Post, M.L.; Corke, T.C. Separation Control on High Angle of Attack Airfoil Using Plasma Actuators. AIAA J. 2004, 42, 2177–2184. [Google Scholar] [CrossRef]
- Jukes, T.N.; Choi, K.S.; Johnson, G.A.; Scott, S.J. Turbulent Drag Reduction by Surface Plasma through Spanwise Flow Oscillation. In Proceedings of the 3rd AIAA Flow Control Conference, San Francisco, CA, USA, 5–8 June 2006. AIAA-2006-3693. [Google Scholar] [CrossRef]
- Visbal, M.R.; Gaitonde, D.V.; Roy, S. Control of Transitional and Turbulent Flows Using Plasma-Based Actuators. In Proceedings of the 36th AIAA Fluid Dynamics Conference and Exhibit, San Francisco, CA, USA, 5–8 June 2006. AIAA-2006-3230. [Google Scholar] [CrossRef]
- Bénard, N.; Jolibois, J.; Moreau, E. Lift and drag performances of an axisymmetric airfoil controlled by plasma actuator. J. Electrost. 2009, 67, 133–139. [Google Scholar] [CrossRef]
- Sato, M.; Nonomura, T.; Okada, K.; Asada, K.; Aono, H.; Yakeno, A.; Abe, Y.; Fujii, K. Mechanisms for laminar separated-flow control using dielectric-barrier-discharge plasma actuator at low Reynolds number. Phys. Fluids 2015, 27, 1–29. [Google Scholar] [CrossRef]
- Thomas, F.O.; Corke, T.C.; Duong, A.; Midya, S.; Yates, K. Turbulent drag reduction using pulsed-DC plasma actuation. J. Phys. D Appl. Phys. 2019, 52, 434001. [Google Scholar] [CrossRef]
- Wang, J.J.; Choi, K.S.; Feng, L.H.; Jukes, T.N.; Whalley, R.D. Recent developments in DBD plasma flow control. Prog. Aerosp. Sci. 2013, 62, 52–78. [Google Scholar] [CrossRef]
- Vernet, J.A.; Orlu, R.; Soderblom, D.; Elofsson, P. Plasma Streamwise Vortex Generators for Flow Separation Control on Trucks. Flow Turbul. Combust. 2018, 100, 1101–1109. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, Y.; Jia, M.; Song, H.; Sun, Z.; Zong, H.; Li, Y. The multichannel discharge plasma synthetic jet actuator. Sens. Actuators A Phys. 2017, 253, 112–117. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Gregory, J.W. Effect of Three-Dimensional Plasma Actuation on the Wake of a Circular Cylinder. AIAA J. 2015, 53, 958–967. [Google Scholar] [CrossRef]
- Feng, L.H.; Jukes, N.T.; Choi, K.S.; Wang, J.J. Flow control over a NACA 0012 airfoil using dielectric-barrier-discharge plasma actuator with a Gurney flap. Exp. Fluids 2012, 52, 1533–1546. [Google Scholar] [CrossRef]
- Fujii, K. Three Flow Feature behind the Flow Control Authority of DBD Plasma Actuator: Result of High-Fidelity Simulations and the Related Experiments. Appl. Sci. 2018, 8, 546. [Google Scholar] [CrossRef]
- Wang, L.; Wong, C.W.; Alam, M.M.; Zhou, Y. Post-stall flow control using a sawtooth plasma actuator in burst mode. Aerosp. Sci. Technol. 2020, 107, 106251. [Google Scholar] [CrossRef]
- Riherd, M.; Roy, S. Serpentine geometry plasma actuators for flow control. J. Appl. Phys. 2013, 114, 083303. [Google Scholar] [CrossRef]
- Segawa, T.; Matsunuma, T. Applications of String-type DBD Plasma Actuators for Flow Control in Turbomachineries. In Proceedings of the 52nd Aerospace Sciences Meeting, National Harbor, Md, USA, 13–17 January 2014. AIAA 2014-1126. [Google Scholar] [CrossRef]
- Kolbakir, C.; Hu, H.; Liu, Y.; Hu, H. An experimental study on different plasma actuator layouts for aircraft icing mitigation. Aerosp. Sci. Technol. 2020, 107, 106325. [Google Scholar] [CrossRef]
- Visbal, M.R. Strategies for control of transitional and turbulent flows using plasma-based actuators. Int. J. Comput. Fluid Dyn. 2010, 24, 237–258. [Google Scholar] [CrossRef]
- Ebrahimi, A.; Hajipour, M. Flow separation control over an airfoil using dual excitation of DBD plasma actuators. Aerosp. Sci. Technol. 2018, 79, 658–668. [Google Scholar] [CrossRef]
- Wu, B.; Gao, C.; Liu, F.; Xue, M.; Zheng, B. Simulation of NACA0015 flow separation controlby burst-mode plasma actuation. Phys. Plasmas 2019, 26, 063507. [Google Scholar] [CrossRef]
- Sato, M.; Aono, H.; Yakeno, A.; Nonomura, T.; Fujii, K.; Okada, K.; Asada, K. Multifactorial Effects of Operating Conditions of Dielectric-Barrier-Discharge Plasma Actuator on Laminar-Separated-Flow Control. AIAA J. 2015, 53, 2544–2559. [Google Scholar] [CrossRef]
- Liu, R.; Niu, Z.; Wang, M.; Hao, M.; Lin, Q. Aerodynamic control of NACA 0021 airfoil model with spark discharge plasma synthetic jets. Sci. China Technol. Sci. 2015, 58, 1949–1955. [Google Scholar] [CrossRef]
- Erfani, R.; Kontis, K. MEE-DBD Plasma Actuator Effect on Aerodynamics of a NACA0015 Aerofoil: Separation and 3D Wake. Comput. Methods Appl. Sci. 2019, 28. [Google Scholar] [CrossRef]
- Cui, Y.; Zhao, Z.; Zheng, J.; Li, J.M.; Khoo, B.C. Separation Control over a NACA0015 Airfoil Using Nanosecond Pulsed Plasma Actuator. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017. AIAA-2017-0715. [Google Scholar] [CrossRef]
- Asano, K.; Sato, M.; Nonomura, T.; Oyama, A.; Fujii, K. Control of Airfoil Flow at Cruise Condition by DBD Plasma Actuator- Sophisticated Airfoil vs. In Simple Airfoil with Flow Control. In Proceedings of the 8th AIAA Flow Control Conference, Washington, DC, USA, 13–17 June 2016. AIAA-2016-3624. [Google Scholar] [CrossRef]
- Ogawa, T.; Asada, K.; Tatsukawa, T.; Fujii, K. Computational Analysis of the Control Authority of Plasma Actuators for Airfoil Flows at Low Angle of Attack. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. AIAA 2020-0578. [Google Scholar] [CrossRef]
- Asada, K.; Ninomiya, Y.; Oyama, A.; Fujii, K. Airfoil Flow Experiment on the Duty Cycle of DBD Plasma Actuator. In Proceedings of the 47th AIAA Aerospace Sciences Meeting including The New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–8 January 2009. AIAA-2009-531. [Google Scholar] [CrossRef]
- Sekimoto, S.; Nonomura, T.; Fujii, K. Burst-Mode Frequency Effects of Dielectric Barrier Discharge Plasma Actuator for Separation Control. AIAA J. 2017, 55, 1385–1392. [Google Scholar] [CrossRef]
- Sekimoto, S.; Fujii, K.; Hosokawa, S.; Akamatsu, H. Flow-control capability of electronic-substrate-sized power supply for a plasma actuator. Sens. Actuators A Phys. 2020, 306, 111951. [Google Scholar] [CrossRef]
- Aono, H.; Sekimoto, S.; Sato, M.; Yakeno, A.; Nonomura, T.; Fujii, K. Computational and experimental analysis of flow structures induced by a plasma actuator with burst modulations in quiescent air. Mech. Eng. J. 2015, 2, 1–16. [Google Scholar] [CrossRef]
- Sato, M.; Okada, K.; Aono, H.; Asada, K.; Yakeno, A.; nd Kozo Fujii, T.N. LES of Separated-flow Controlled by DBD Plasma Actuator around NACA 0015 over Reynolds Range of 104–106. In Proceedings of the 53rd AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 5–9 January 2015. AIAA 2015-0308. [Google Scholar] [CrossRef]
- Suzen, Y.B.; Huang, P.G. Simulations of Flow Separation Contorl using Plasma Actuator. In Proceedings of the 44th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9–12 January 2006. AIAA-2006-877. [Google Scholar] [CrossRef]
- Font, G.I.; Enloe, C.L.; McLaughlin, T.E. Plasma Volumetric Effects on the Force Production of a Plasma Actuator. AIAA J. 2010, 48, 1869–1874. [Google Scholar] [CrossRef]
- Chen, D.; Asada, K.; Sekimoto, S.; Fujii, K.; Nishida, H. A high-fidelity body-force modeling approachfor plasma-based flow control simulations. Phys. Fluids 2021, 33, 037115. [Google Scholar] [CrossRef]
- Pereira, R.; Ragni, D.; Kotsonis, M. Effect of external flow velocity on momentum transfer of dielectric barrier discharge plasma actuators. J. Appl. Phys. 2014, 103301. [Google Scholar] [CrossRef]
- Kawai, S.; Fujii, K. Analysis and Prediction of Thin-Airfoil Stall Phenomena Using Hybrid Turbulent Methodology. AIAA J. 2005, 43, 953–961. [Google Scholar] [CrossRef]
- Kojima, R.; Nonomura, T.; Oyama, A.; Fujii, K. Large-Eddy Simulation of Low-Reynolds-Number Flow Over Thick and Thin NACA Airfoils. J. Aircr. 2013, 50, 187–196. [Google Scholar] [CrossRef]
- Lee, D.; Kawai, S.; Nonomura, T.; Anyoji, M.; Aono, H.; Oyama, A.; Asai, K.; Fujii, K. Mechanisms of surface pressure distribution within a laminar separation bubble at different Reynolds numbers. Phys. Fluids 2015, 27, 023602. [Google Scholar] [CrossRef]
- Lele, S.K. Compact Finite Difference Schemes with Spectral-like Resolution. J. Comput. Phys. 1992, 103, 16–42. [Google Scholar] [CrossRef]
- Gaitonde, D.V.; Visbal, M.R. Padé-Type Higher-Order Boundary Filters for the Navier-Stokes Equations. AIAA J. 2000, 38, 2103–2112. [Google Scholar] [CrossRef]
- Visbal, M.R.; Rizzetta, D.P. Large-Eddy Simulation on Curvilinear Grids Using Compact Differencing and Filtering Schemes. J. Fluids Eng. 2002, 124, 836–847. [Google Scholar] [CrossRef]
- Fujii, K. Simple Ideas for the Accuracy and Efficiency Improvement of the Compressible Flow Simulation Methods. In Proceedings of the International CFD Workshop on Supersonic Transport Design, Tokyo, Japan, 16 March 1998; pp. 20–28, (later published as JAXA-SP-06-029E, pp. 25–28). [Google Scholar]
- Choi, H.; Moin, P. Effects of the Computational Time Step on Numerical Solutions of Turbulent Flow. J. Comput. Phys. 1994, 113, 1–4. [Google Scholar] [CrossRef]
- Visbal, M.R.; Rizzetta, D.P. Large-eddy Simulation on General Geometries Using Compact Differencing and Filtering Schemes. In Proceedings of the 40th AIAA Aerospace Sciences Meeting & Exhibit, Reno, NV, USA, 14–17 January 2002. AIAA-2002-288. [Google Scholar] [CrossRef]
- Rizzetta, D.P.; Visbal, M.R.; Gaitonde, D.V. Large-Eddy Simulation of Supersonic Compression-Ramp Flow by High-Order Method. AIAA J. 2001, 39, 2283–2292. [Google Scholar] [CrossRef]
- Kawai, S.; Fujii, K. Compact Scheme with Filtering for Large-Eddy Simulation of Transitional Boundary Layer. AIAA J. 2008, 46, 690–700. [Google Scholar] [CrossRef]
- Fujii, K. Unified Zonal Method Based on the Fortified Solution Algorithm. J. Comput. Phys. 1995, 118, 92–108. [Google Scholar] [CrossRef]
- Ogawa, T.; Asada, K.; Sekimoto, S.; Tatsukawa, T.; Fujii, K. Dynamic Burst Actuation to Enhance the Flow Control Authority of Plasma Actuators. MDPI Aerospace 2021, 8, 396. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total Point | ||||
|---|---|---|---|---|
| Zone 1 | 759 | 134 | 179 | 18,205,374 |
| Zone 2 | 149 | 134 | 111 | 2,216,226 |
| [deg] | |||
|---|---|---|---|
| 6 | 8 | 10 | |
| PA-OFF | 0.076 | 0.078 | 0.064 |
| Continuous | 0.115 | 0.098 | 0.097 |
| Burst | 0.094 | 0.059 | 0.078 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ogawa, T.; Asada, K.; Sato, M.; Tatsukawa, T.; Fujii, K. Computational Study of the Plasma Actuator Flow Control for an Airfoil at Pre-Stall Angles of Attack. Appl. Sci. 2022, 12, 9073. https://doi.org/10.3390/app12189073
Ogawa T, Asada K, Sato M, Tatsukawa T, Fujii K. Computational Study of the Plasma Actuator Flow Control for an Airfoil at Pre-Stall Angles of Attack. Applied Sciences. 2022; 12(18):9073. https://doi.org/10.3390/app12189073
Chicago/Turabian StyleOgawa, Takuto, Kengo Asada, Makoto Sato, Tomoaki Tatsukawa, and Kozo Fujii. 2022. "Computational Study of the Plasma Actuator Flow Control for an Airfoil at Pre-Stall Angles of Attack" Applied Sciences 12, no. 18: 9073. https://doi.org/10.3390/app12189073
APA StyleOgawa, T., Asada, K., Sato, M., Tatsukawa, T., & Fujii, K. (2022). Computational Study of the Plasma Actuator Flow Control for an Airfoil at Pre-Stall Angles of Attack. Applied Sciences, 12(18), 9073. https://doi.org/10.3390/app12189073