
Existence and Stability of nT-Periodic Orbits in the Boost Converter



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- An exact formula is presented to provide sufficient conditions for the existence of -periodic orbits with and without saturation in the duty cycle.
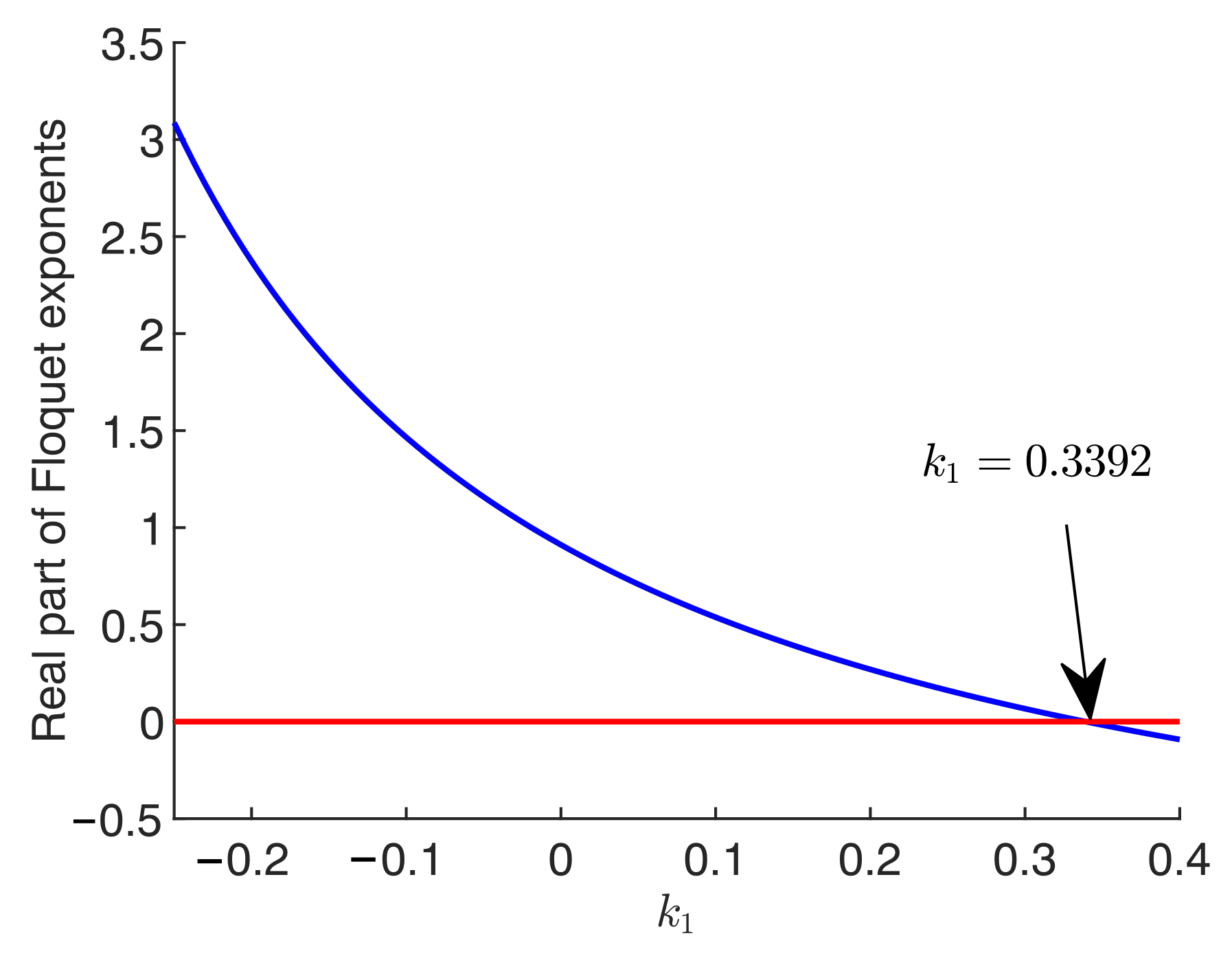
- The application of Poincaré is generalized and an equation is presented that allows calculating the Jacobian matrix to determine the stability of the -periodic orbits. A wide range of the parameter, - and -periodic orbits in the boost converter, and Floquet exponents are determined to analyze the stability limit of the -periodic orbit.
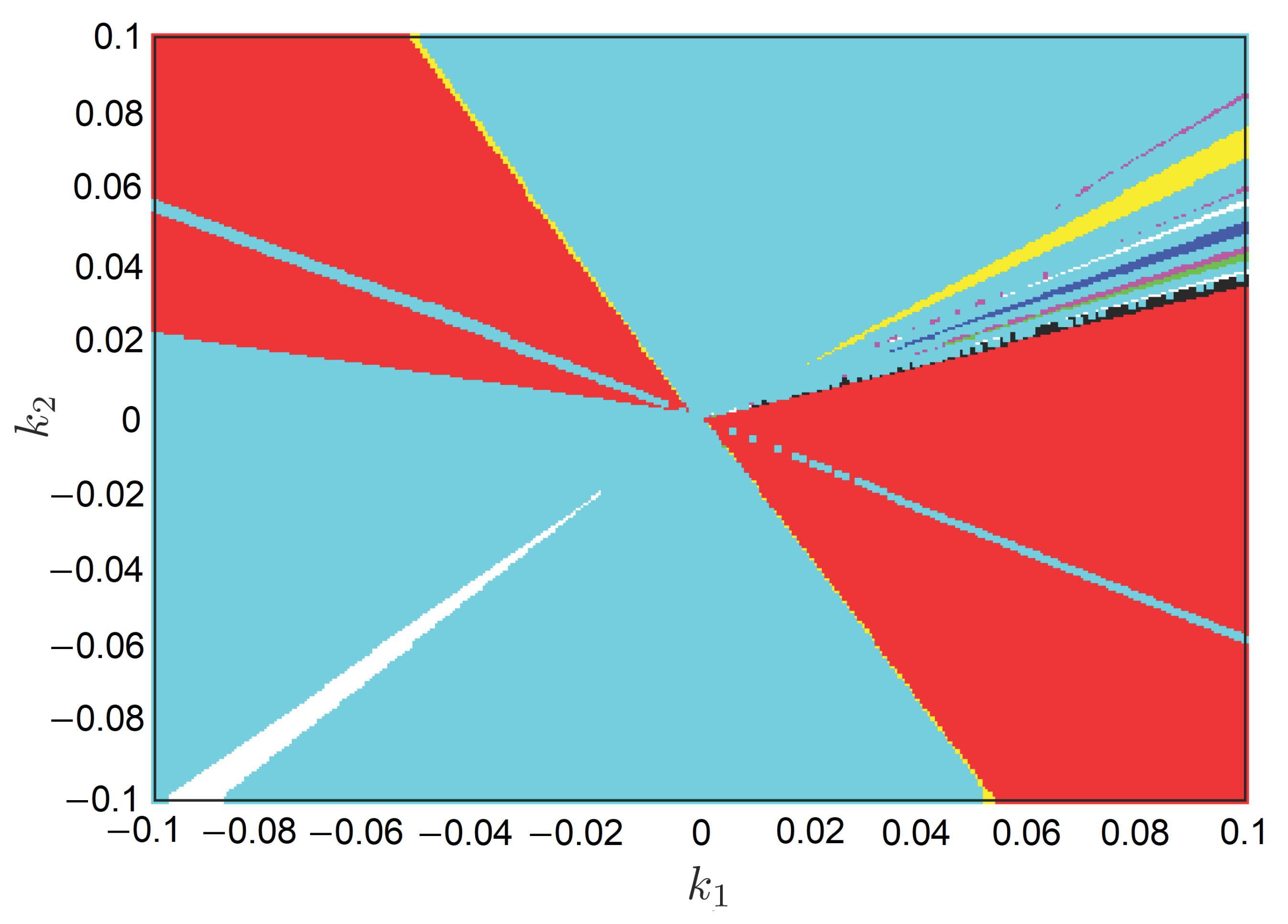
- A biparametric diagram that generates nT-periodic orbits is created to perform the analysis from - to -periodic orbits.
- The variational equation that admits the perturbation of the -periodic orbits is calculated to determine the system stability.
2. Materials and Methods
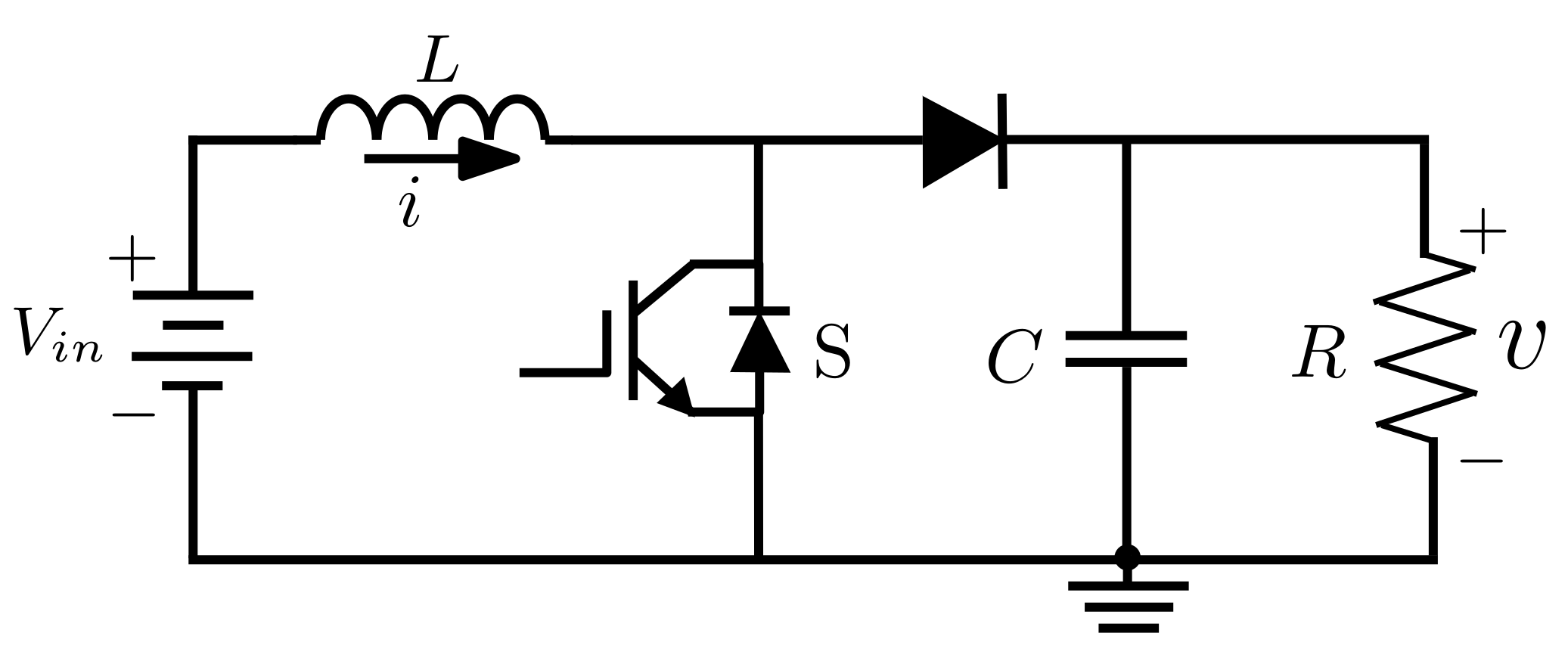
2.1. Boost Converter
- For the topology 1 ():
- For the topology 2 ():In these two expressions, the term . In addition, it is assumed that , which means that the relation must be fulfilled in the experimental test. In other words, this relationship must be fulfilled because if there is a very small load resistance R, the current in the load will tend towards infinity. The same thing happens if C is very small: the current in the capacitor will tend to infinity. Furthermore, if the inductance is too large, the current in the inductor will tend to infinity. All these behaviors are considered as unwanted solutions.
- Moreover, a topology 3 is obtained when inductor current (), as expressed in the following equation:However, this third topology corresponds to the discontinuous conduction mode. This research will not consider it, as the work focuses on performing analysis in the continuous condition mode.
2.2. Duty Cycle
- 1.
- If , the system is forced to evolve according to the 1 topology.
- 2.
- If , the system is forced to evolve according to the 2 topology.
- 3.
- The denominator of Equation (20) is equal to , where and are control parameters with ZAD. If this expression is zero, the system is required to evolve according to the topology 1 if the numerator and evolve according to the topology 2 if .
2.3. System Discretization
- 1.
- If , the Poincaré map corresponds to
- 2.
- If , the Poincaré map corresponds to
2.4. Stability of Periodic Orbits
2.5. -Periodic Orbits
2.5.1. Unsaturated -Periodic Orbits
2.5.2. Semi-Saturated -Periodic Orbits
2.5.3. Saturated -Periodic Orbits
2.6. Stability of Periodic Orbits
2.7. Generalization of the Poincaré Map
Stability of -Periodic Orbits
2.8. Floquet Exponents
3. Results and Discussion
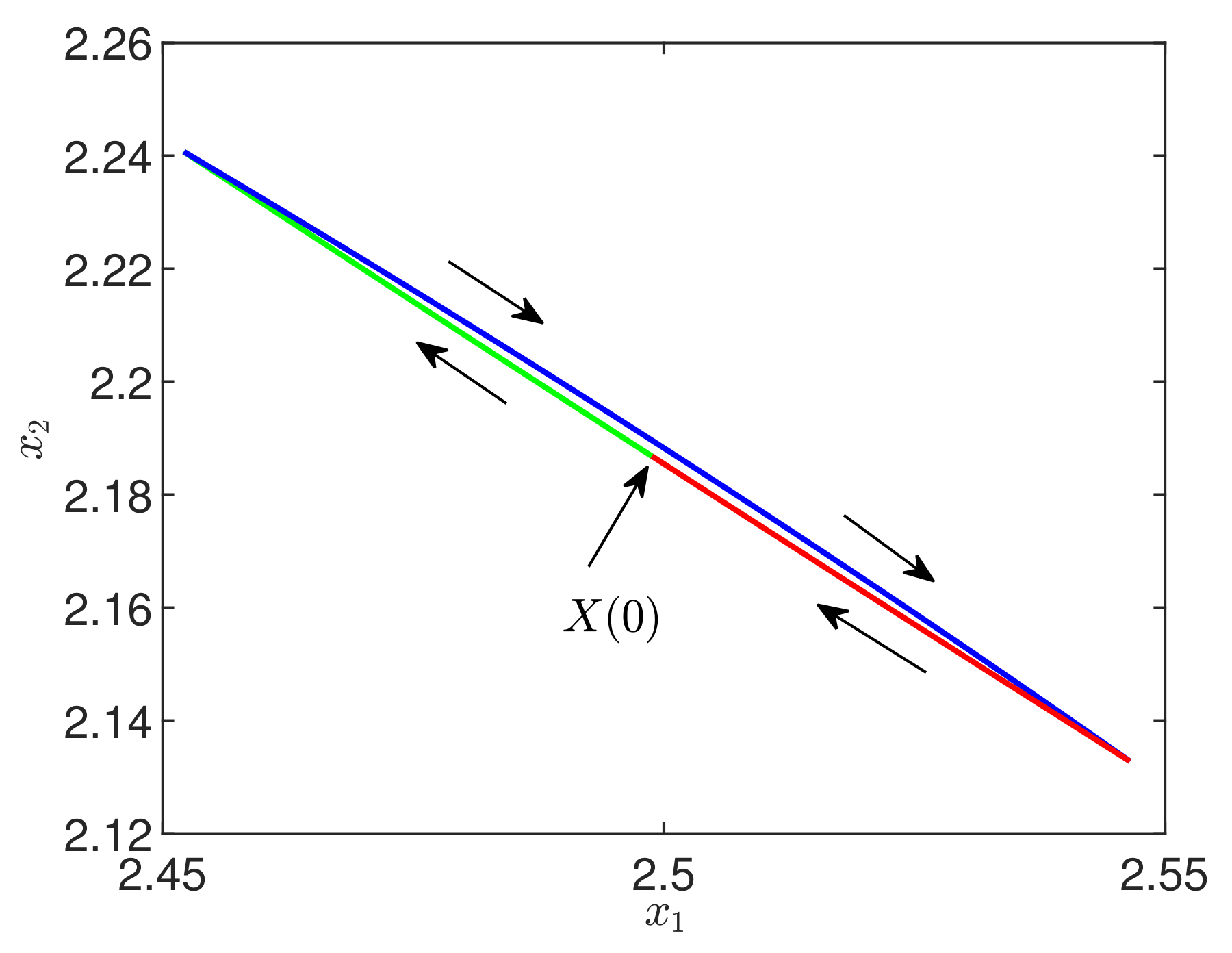
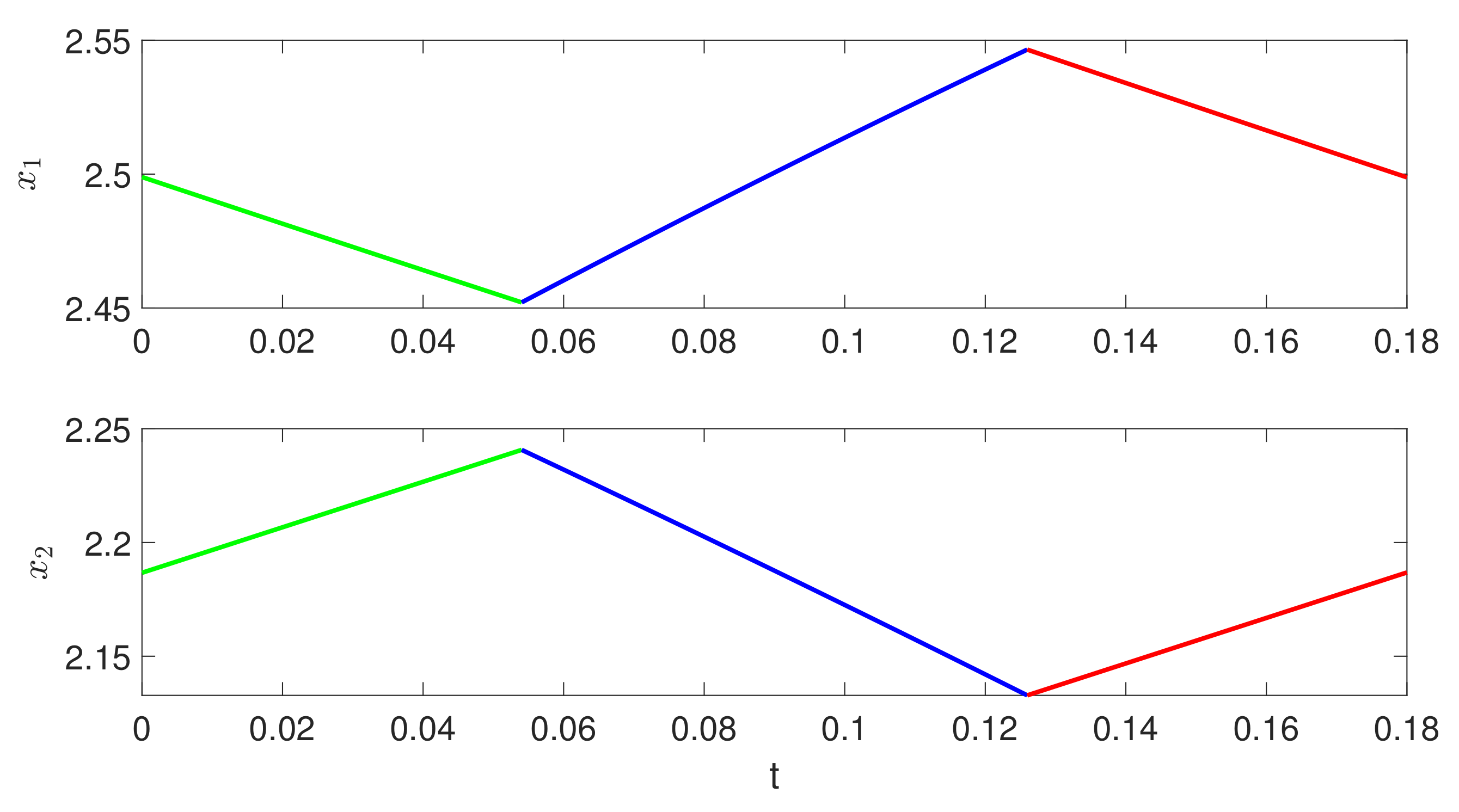
3.1. Stability of Periodic Orbits
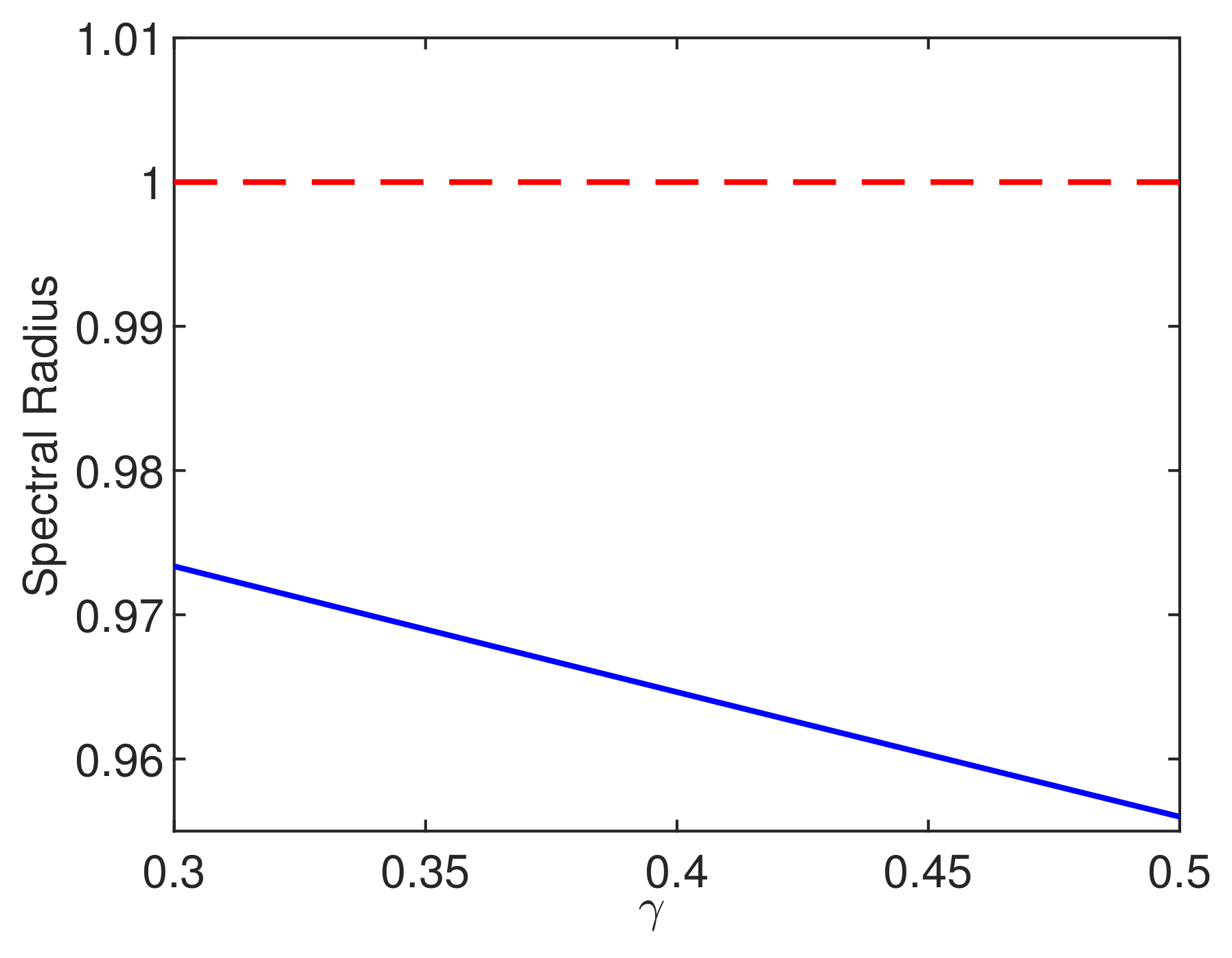
3.2. Spectral Radius of the Jacobian Matrix
3.3. Biparametric Diagram
3.4. Floquet Exponents
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Blaabjerg, F.; Chen, Z.; Kjaer, S. Power electronics as efficient interface in dispersed power generation systems. IEEE Trans. Power Electron. 2004, 19, 1184–1194. [Google Scholar] [CrossRef]
- Farh, H.; Othman, M.; Eltamaly, A.; Al-Saud, M. Maximum Power Extraction from a Partially Shaded PV System Using an Interleaved Boost Converter. Energies 2018, 11, 2543. [Google Scholar] [CrossRef]
- Revelo-Fuelagán, J.; Candelo-Becerra, J.E.; Hoyos, F.E. Power Factor Correction of Compact Fluorescent and Tubular LED Lamps by Boost Converter with Hysteretic Control. J. Daylight. 2020, 7, 73–83. [Google Scholar] [CrossRef]
- Fossas, E.; Olivar, G. Study of chaos in the buck converter. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1996, 43, 13–25. [Google Scholar] [CrossRef]
- Toribio, E.; El Aroudi, A.; Olivar, G.; Benadero, L. Numerical and experimental study of the region of period-one operation of a PWM boost converter. IEEE Trans. Power Electron. 2000, 15, 1163–1171. [Google Scholar] [CrossRef]
- Poddar, G.; Chakrabarty, K.; Banerjee, S. Experimental control of chaotic behavior of buck converter. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1995, 42, 502–504. [Google Scholar] [CrossRef]
- Di Bernardo, M.; Garefalo, F.; Glielmo, L.; Vasca, F. Switchings, bifurcations, and chaos in DC/DC converters. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1998, 45, 133–141. [Google Scholar] [CrossRef]
- Repecho, V.; Biel, D.; Ramos-Lara, R. Robust ZAD Sliding Mode Control for an 8-Phase Step-Down Converter. IEEE Trans. Power Electron. 2020, 35, 2222–2232. [Google Scholar] [CrossRef]
- Vergara Perez, D.D.C.; Trujillo, S.C.; Hoyos Velasco, F.E. Period Addition Phenomenon and Chaos Control in a ZAD Controlled Boost Converter. Int. J. Bifurc. Chaos 2018, 28, 1850157. [Google Scholar] [CrossRef]
- Repecho, V.; Biel, D.; Ramos-Lara, R.; Vega, P.G. Fixed-Switching Frequency Interleaved Sliding Mode Eight-Phase Synchronous Buck Converter. IEEE Trans. Power Electron. 2018, 33, 676–688. [Google Scholar] [CrossRef] [Green Version]
- Chatterjee, K.; Ghosh, A.; Saha, P.K.; Das, A. An analysis of power-factor-correction boost converter’s nonlinear dynamics through bifurcation diagrams. In Proceedings of the 2016 International Conference on Intelligent Control Power and Instrumentation (ICICPI), Kolkata, India, 21–23 October 2016; pp. 142–147. [Google Scholar] [CrossRef]
- Angulo, F.; Fossas, E.; Olivar, G. Transition from Periodicity to Chaos in a PWM-Controlled Buck Converter with ZAD Strategy. Int. J. Bifurc. Chaos 2005, 15, 3245–3264. [Google Scholar] [CrossRef]
- Trujillo, S.C.; Candelo-Becerra, J.E.; Hoyos, F.E. Numerical Validation of a Boost Converter Controlled by a Quasi-Sliding Mode Control Technique with Bifurcation Diagrams. Symmetry 2022, 14, 694. [Google Scholar] [CrossRef]
- Munoz, J.; Osorio, G.; Angulo, F. Boost converter control with ZAD for power factor correction based on FPGA. In Proceedings of the 2013 Workshop on Power Electronics and Power Quality Applications (PEPQA), Bogota, Colombia, 6–7 July 2013; pp. 1–5. [Google Scholar] [CrossRef]
- El Aroudi, A.; Orabi, M. Stabilizing Technique for AC–DC Boost PFC Converter Based on Time Delay Feedback. IEEE Trans. Circuits Syst. II Express Briefs 2010, 57, 56–60. [Google Scholar] [CrossRef]
- Aroudi, A.E.; Debbat, M.; Martinez-Salamero, L. Poincaré maps modeling and local orbital stability analysis of discontinuous piecewise affine periodically driven systems. Nonlinear Dyn. 2007, 50, 431–445. [Google Scholar] [CrossRef]
- Amador, A.; Casanova, S.; Granada, H.A.; Olivar, G.; Hurtado, J. Codimension-Two Big-Bang Bifurcation in a ZAD-Controlled Boost DC-DC Converter. Int. J. Bifurc. Chaos 2014, 24, 1450150. [Google Scholar] [CrossRef]
- Baumeister, J.; Leitao, A. Introdução à Teoria de Controle e Programação Dinâmica; Instituto de Matemática Pura e Aplicada: Rio de Janeiro, Brazil, 2014; p. 399. [Google Scholar]
- Doering, C.I.; Lopes, A.O. Equacoes Diferenciais Ordinárias; Instituto de Matemática Pura e Aplicada: Rio de Janeiro, Brazil, 2016; p. 423. [Google Scholar]
- Fossas, E.; Griñó, R.; Biel, D. Quasi-sliding control based on pulse width modulation, zero dynamics and the L2 norm. In Proceedings of the Advances in Variable Structure Systems; WORLD SCIENTIFIC: Singapore, 2000; pp. 335–344. [Google Scholar] [CrossRef]
- Hoyos, F.E.; Candelo-Becerra, J.E.; Hoyos Velasco, C.I. Model-Based Quasi-Sliding Mode Control with Loss Estimation Applied to DC–DC Power Converters. Electronics 2019, 8, 1086. [Google Scholar] [CrossRef]
- Kuznetsov, Y.A. Elements of Applied Bifurcation Theory, 3rd ed.; Springer: New York, NY, USA, 2004; Volume 112, p. 634. [Google Scholar] [CrossRef]
- Parker, T.S.; Chua, L.O. Practical Numerical Algorithms for Chaotic Systems, 1st ed.; Springer: New York, NY, USA, 1989; p. 348. [Google Scholar] [CrossRef]
- Devaney, R.L. An Introduction to Chaotic Dynamical Systems, 3rd ed.; Chapman and Hall/CRC: Boca Raton, FL, USA, 2021; pp. 1–432. [Google Scholar] [CrossRef]
- Nieto, J.I. Introducción a los espacios de Hilbert; Programa Regional de Desarrollo Científico y Tecnológico, Departamento de Asuntos Científicos, Secretaría General de la Organización de los Estados Americanos: Washington, DC, USA, 1978; p. 150. [Google Scholar]
- Bachman, G.; Narici, L. Functional Analysis; Dover Publications: Mineola, NY, USA, 2000; p. 532. [Google Scholar]
- Munkres, J.R. Analysis on Manifolds, 1st ed.; Addison-Wesley Publishing Company: Redwood City, CA, USA, 1991; p. 366. [Google Scholar]
- Hoyos Velasco, F.E.; García, N.T.; Garcés Gómez, Y.A. Adaptive Control for Buck Power Converter Using Fixed Point Inducting Control and Zero Average Dynamics Strategies. Int. J. Bifurc. Chaos 2015, 25, 1550049. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trujillo, S.C.; Candelo-Becerra, J.E.; Hoyos, F.E. Existence and Stability of nT-Periodic Orbits in the Boost Converter. Appl. Sci. 2022, 12, 9565. https://doi.org/10.3390/app12199565
Trujillo SC, Candelo-Becerra JE, Hoyos FE. Existence and Stability of nT-Periodic Orbits in the Boost Converter. Applied Sciences. 2022; 12(19):9565. https://doi.org/10.3390/app12199565
Chicago/Turabian StyleTrujillo, Simeón Casanova, John E. Candelo-Becerra, and Fredy E. Hoyos. 2022. "Existence and Stability of nT-Periodic Orbits in the Boost Converter" Applied Sciences 12, no. 19: 9565. https://doi.org/10.3390/app12199565