



Human-Centered Dynamic Service Scheduling Approach in Multi-Agent Environments


Abstract
:1. Introduction
- We present a scheduler in which multiple heterogeneous agents perform services with sequential interdependencies.
- The proposed scheduler can accept complex and dynamic user requests.
2. Related Work
3. Human-Centered Dynamic Service Scheduling Approach
3.1. Proposed Scheduling Framework Overview
- Job Decomposer: It decomposes the job requested by a user into a list of operations that an agent can perform.
- Operation Manager: It sequences and organizes the operations using operation queues.
- Operation Allocator: It allocates an operation to an appropriate agent.
3.2. Multi-Agent Scheduler
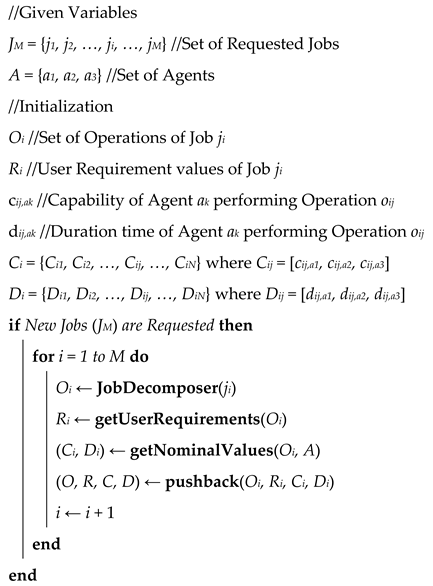
3.2.1. Job Decomposer
- Perform the service first;
- Perform the service last;
- Perform the service in a specific order;
- Perform multiple services simultaneouly;
- Perform the service only when specific conditions are met.
| Algorithm 1: JobDecomposer() |
 |
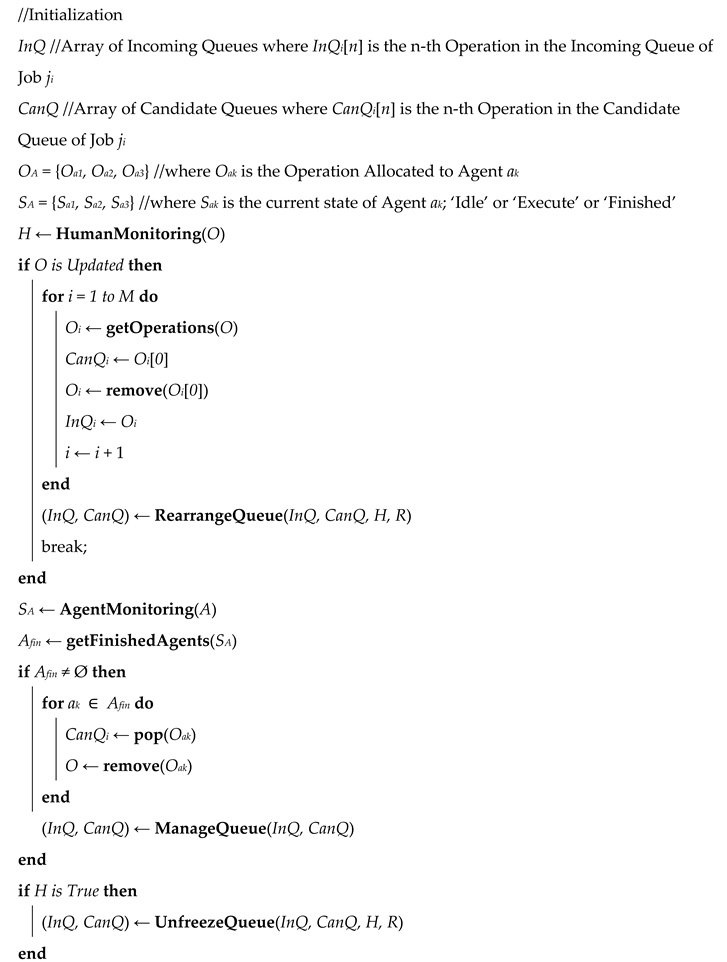
3.2.2. Operation Manager
| Algorithm 2: OperationManager() |
 |
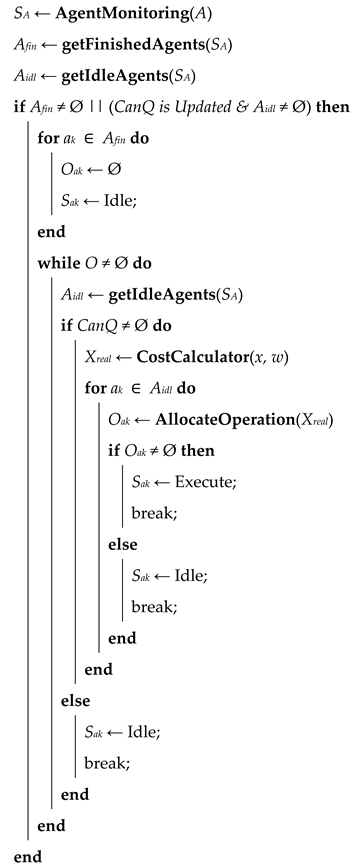
3.2.3. Operation Allocator
| Algorithm 3: DynamicAllocator() |
 |
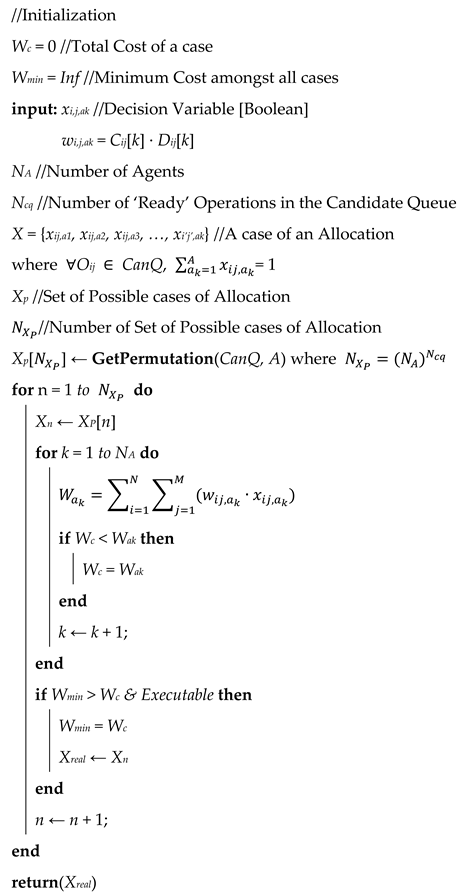
| Function CostCalculator(x, w) |
 |
4. Experiments and Results
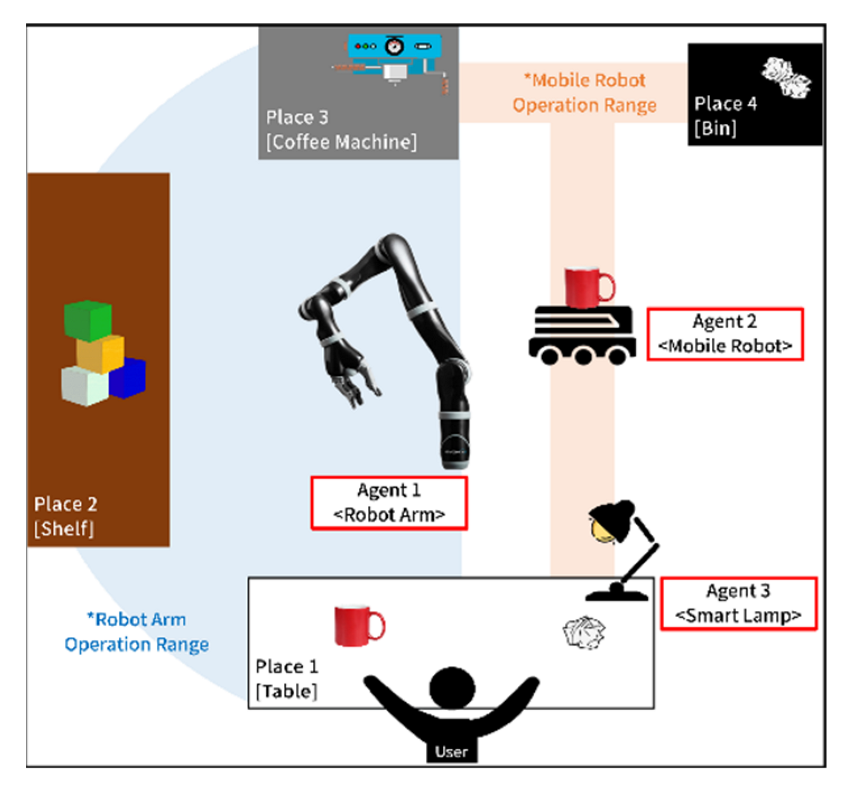
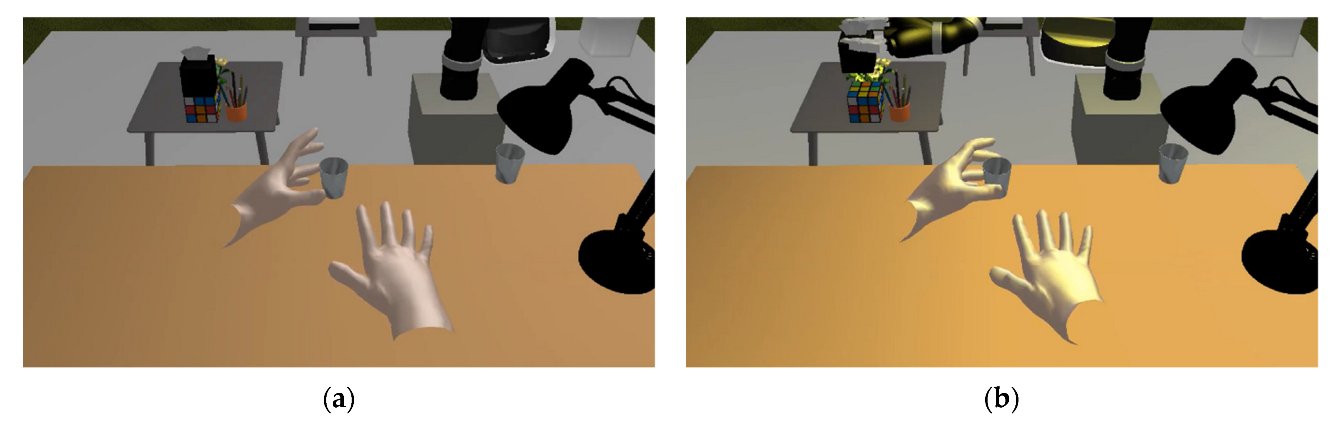
4.1. Smart Office Prototype
4.2. System Setup
4.3. Experimental Scenarios
4.4. Results and Discussion
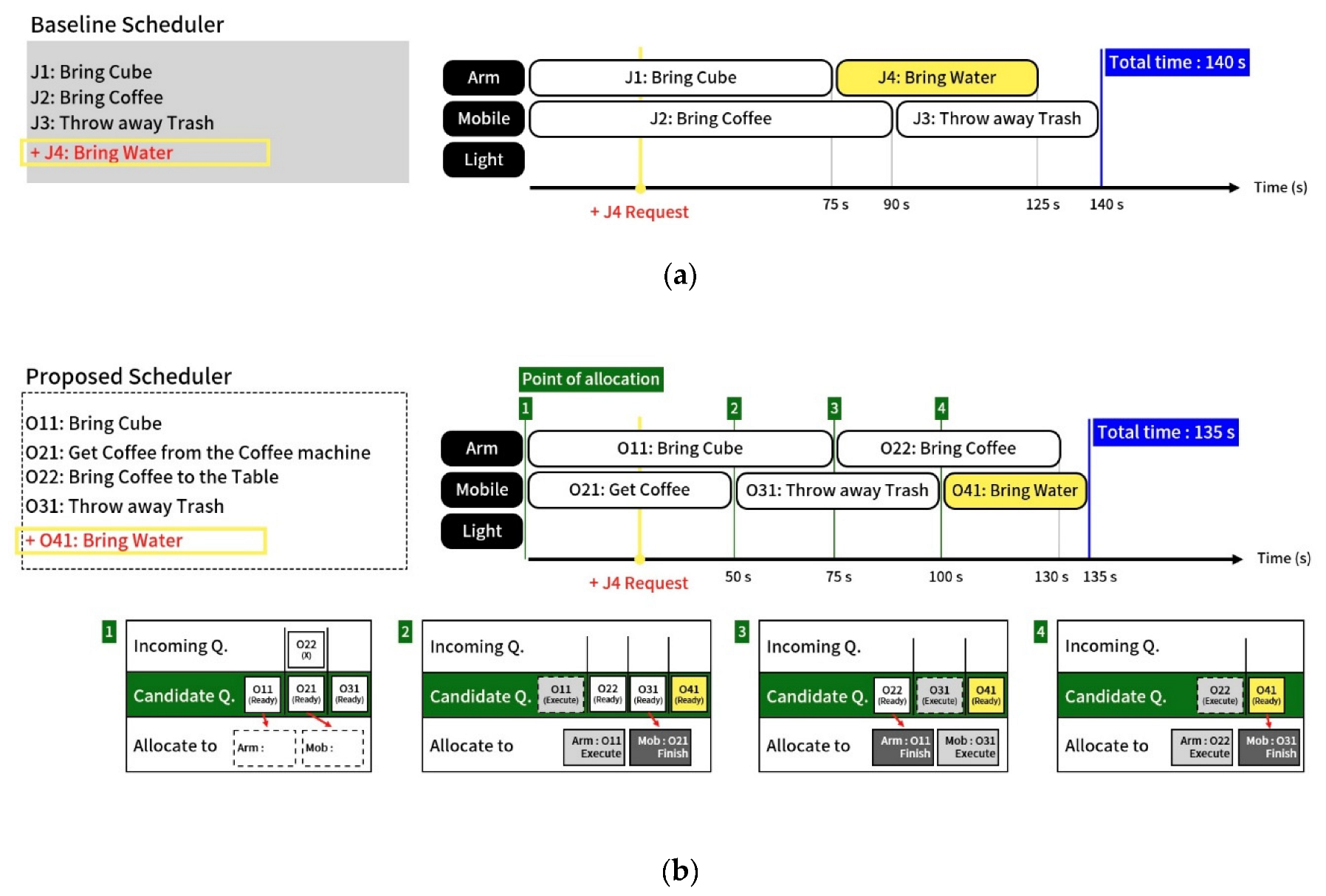
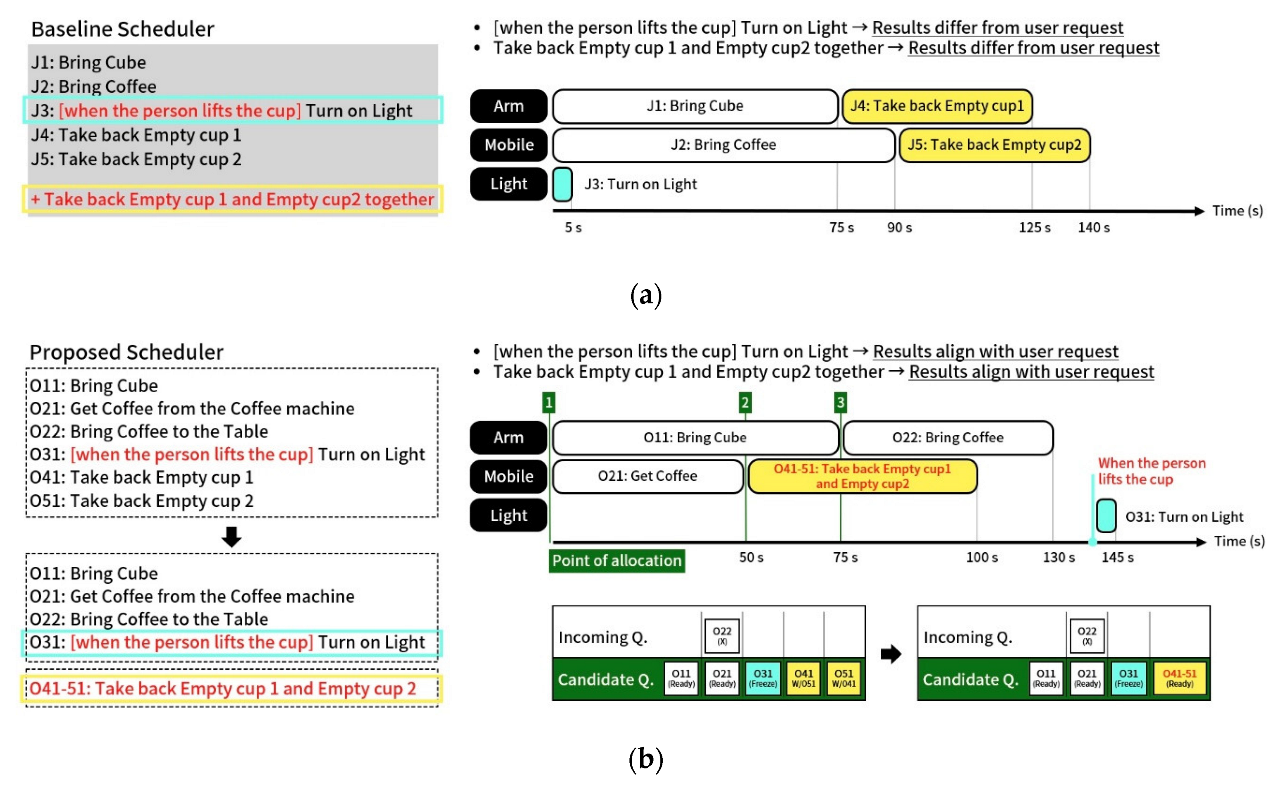
4.4.1. Scenario 1: Additional Job Request
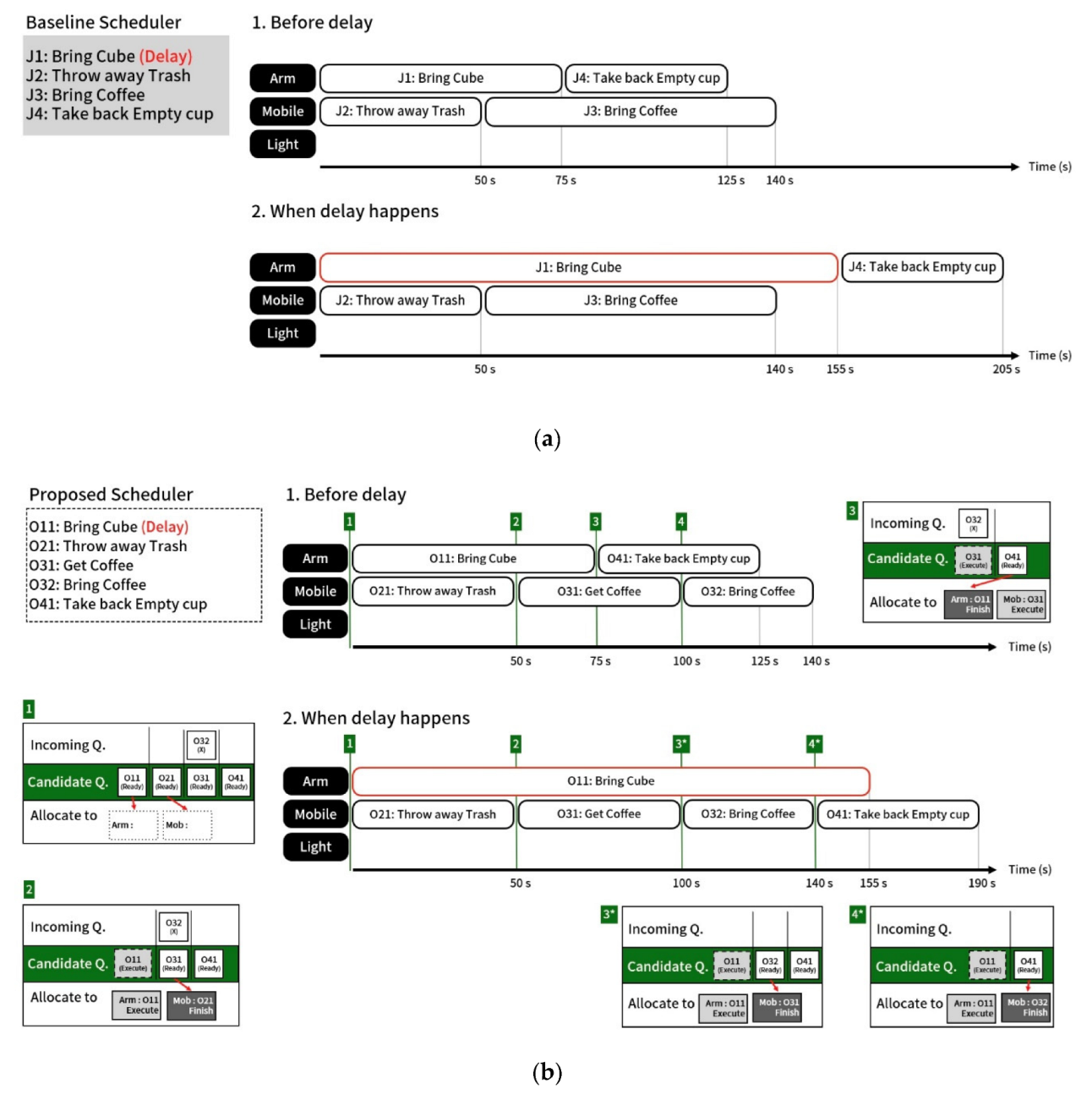
4.4.2. Scenario 2: Delay Occurs
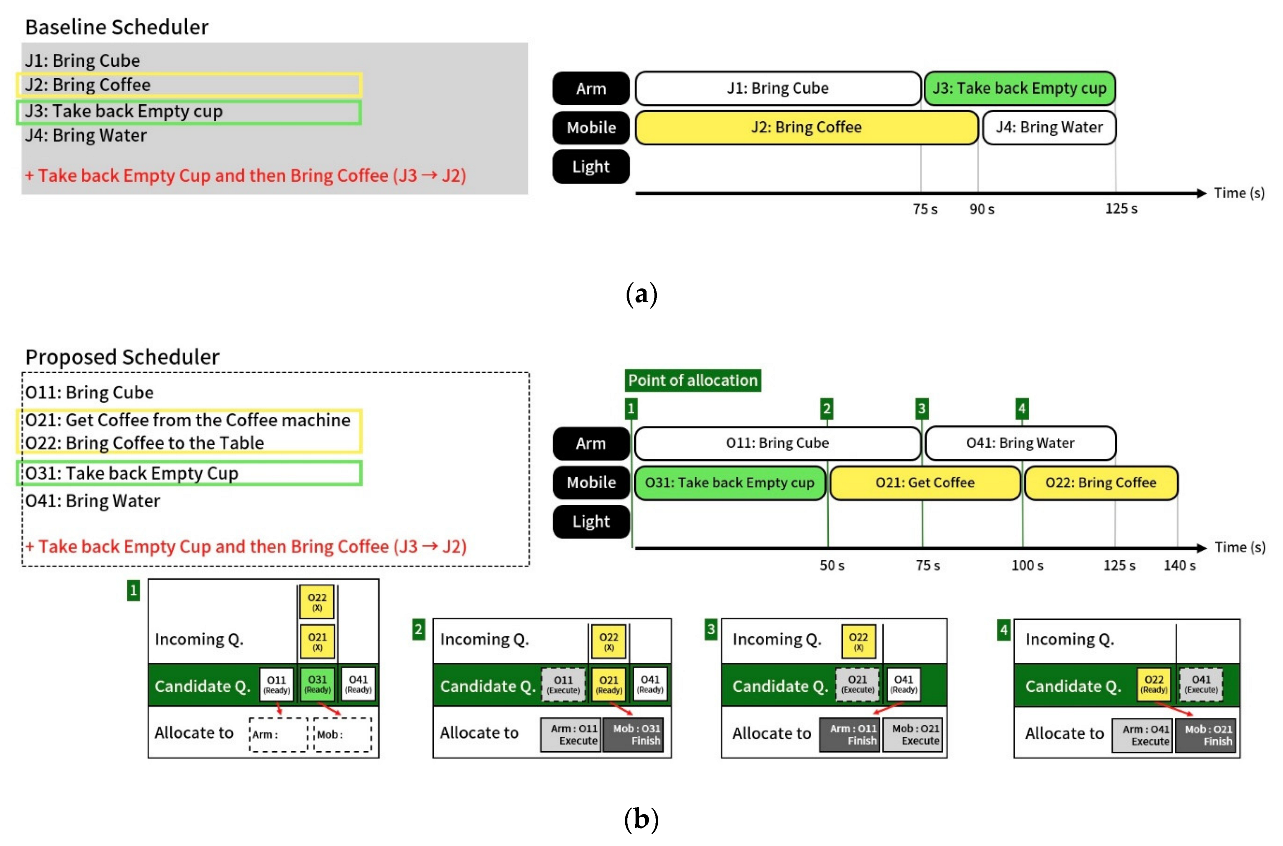
4.4.3. Scenario 3: User Requests to Change the Order of Service
4.4.4. Scenario 4: Preferred Time and Simultaneous Request
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Collins, G.R. Improving human–robot interactions in hospitality settings. Int. Hosp. Rev. 2020, 34, 61–79. [Google Scholar] [CrossRef]
- Lai, C.J.; Tsai, C.P. Design of introducing service robot into catering services. In Proceedings of the 2018 International Conference on Service Robotics Technologies, Chengdu, China, 16–19 March 2018; pp. 62–66. [Google Scholar]
- Wang, T.M.; Tao, Y.; Liu, H. Current researches and future development trend of intelligent robot: A review. Int. J. Autom. Comput. 2018, 15, 525–546. [Google Scholar] [CrossRef]
- Lee, I. Service Robots: A Systematic Literature Review. Electronics 2021, 10, 2658. [Google Scholar] [CrossRef]
- Chiang, A.H.; Trimi, S. Impacts of service robots on service quality. Serv. Bus. 2020, 14, 439–459. [Google Scholar] [CrossRef]
- Ismail, Z.H.; Sariff, N.; Hurtado, E.G. A survey and analysis of cooperative multi-agent robot systems: Challenges and directions. In Applications of Mobile Robots; IntechOpen: London, UK, 2018; pp. 8–14. [Google Scholar]
- Johannsmeier, L.; Haddadin, S. A hierarchical human-robot interaction-planning framework for task allocation in collaborative industrial assembly processes. IEEE Robot. Autom. Lett. 2016, 2, 41–48. [Google Scholar] [CrossRef] [Green Version]
- Pupa, A.; Van Dijk, W.; Secchi, C. A human-centered dynamic scheduling architecture for collaborative application. IEEE Robot. Autom. Lett. 2021, 6, 4736–4743. [Google Scholar] [CrossRef]
- Maderna, R.; Pozzi, M.; Zanchettin, A.M.; Rocco, P.; Prattichizzo, D. Flexible scheduling and tactile communication for human–robot collaboration. Robot. Comput. Integr. Manuf. 2022, 73, 102233. [Google Scholar] [CrossRef]
- García, S.; Strüber, D.; Brugali, D.; Berger, T.; Pelliccione, P. Robotics software engineering: A perspective from the service robotics domain. In Proceedings of the 28th ACM Joint Meeting on European Software Engineering Conference and Symposium on the Foundations of Software Engineering, Virtual Event, USA, 8–13 November 2020; pp. 593–604. [Google Scholar]
- Xu, K.; Fei, R.; He, D. A tabu-search algorithm for scheduling jobs with precedence constraints on parallel machines. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June 2018; pp. 2774–2781. [Google Scholar]
- Casalino, A.; Zanchettin, A.M.; Piroddi, L.; Rocco, P. Optimal scheduling of human–robot collaborative assembly operations with time petri nets. IEEE Trans. Autom. Sci. Eng. 2019, 18, 70–84. [Google Scholar] [CrossRef]
- el Makrini, I.; Merckaert, K.; de Winter, J.; Lefeber, D.; Vanderborght, B. Task allocation for improved ergonomics in Human-Robot Collaborative Assembly. Interact. Stud. 2019, 20, 102–133. [Google Scholar] [CrossRef]
- Malik, A.A.; Bilberg, A. Complexity-based task allocation in human-robot collaborative assembly. Industrial Robot 2019, 46, 471–480. [Google Scholar] [CrossRef]
- Riedelbauch, D. Dynamic Task Sharing for Flexible Human-Robot Teaming under Partial Workspace Observability. Ph.D. Thesis, University of Bayreuth, Bayreuth, Germany, 2020. [Google Scholar]
- Ranz, F.; Hummel, V.; Sihn, W. Capability-based task allocation in human-robot collaboration. Procedia Manuf. 2017, 9, 182–189. [Google Scholar] [CrossRef]
- Dalle Mura, M.; Dini, G. Designing assembly lines with humans and collaborative robots: A genetic approach. CIRP Ann. 2019, 68, 1–4. [Google Scholar] [CrossRef]
- Pearce, M.; Mutlu, B.; Shah, J.; Radwin, R. Optimizing makespan and ergonomics in integrating collaborative robots into manufacturing processes. IEEE Trans. Autom. Sci. Eng. 2018, 15, 1772–1784. [Google Scholar] [CrossRef]
- Levine, S.J.; Williams, B.C. Watching and Acting Together: Concurrent Plan Recognition and Adaptation for Human-Robot Teams. J. Artif. Intell. Res. 2018, 63, 281–359. [Google Scholar] [CrossRef] [Green Version]
- Darvish, K.; Bruno, B.; Simetti, E.; Mastrogiovanni, F.; Casalino, G. Interleaved online task planning, simulation, task allocation and motion control for flexible human-robot cooperation. In Proceedings of the 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Nanjing, China, 27–31 August 2018; pp. 58–65. [Google Scholar]
- Bänziger, T.; Kunz, A.; Wegener, K. Optimizing human–robot task allocation using a simulation tool based on standardized work descriptions. J. Intell. Manuf. 2020, 31, 1635–1648. [Google Scholar] [CrossRef]
- Raatz, A.; Blankemeyer, S.; Recker, T.; Pischke, D.; Nyhuis, P. Task scheduling method for HRC workplaces based on capabilities and execution time assumptions for robots. CIRP Ann. 2020, 69, 13–16. [Google Scholar] [CrossRef]
- Zhu, J.; Shi, J.; Yang, Z.; Li, B. A real-time decentralized algorithm for task scheduling in multi-agent system with continuous damage. Appl. Soft Comput. 2019, 83, 105628. [Google Scholar] [CrossRef]
- Liu, S.; Tian, G.; Zhang, Y.; Zhang, M.; Liu, S. Service planning oriented efficient object search: A knowledge-based framework for home service robot. Expert Syst. Appl. 2022, 187, 115853. [Google Scholar] [CrossRef]
- Zhang, Y.; Tian, G.; Zhang, S.; Li, C. A knowledge-based approach for multiagent collaboration in smart home: From activity recognition to guidance service. IEEE Trans. Instrum. Meas. 2019, 69, 317–329. [Google Scholar] [CrossRef]
- Zhang, Y.; Tian, G.; Chen, H. Exploring the cognitive process for service task in smart home: A robot service mechanism. Future Gener. Comput. Syst. 2020, 102, 588–602. [Google Scholar] [CrossRef]
- Wang, Z.; Tian, G. Hybrid offline and online task planning for service robot using object-level semantic map and probabilistic inference. Inf. Sci. 2022, 593, 78–98. [Google Scholar] [CrossRef]
- Kinova Jaco Assistive Robotic Arm. Available online: https://assistive.kinovarobotics.com/product/jaco-robotic-arm (accessed on 18 September 2022).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Job | Op Seq. | Op Type | Description | Obj | Capable Agent | Arm Time | Mobile Time | Light Time |
|---|---|---|---|---|---|---|---|---|
| Bring cube | 1 | Move | Bring cube to the table from the shelf | Cube | A | 75 | ∞ | ∞ |
| Bring coffee | 1 | Fetch | Get coffee from the coffee machine | Cup1 | M | ∞ | 50 | ∞ |
| 2 | Move | Bring coffee to the table from the coffee machine | Cup1 | A, M | 55 | 40 | ∞ | |
| Bring water | 1 | Fetch | Bring water to the table | Bottle | A, M | 50 | 35 | ∞ |
| Take back empty cup | 1 | Fetch | Take empty cup from the table | Cup2 | A, M | 50 | 50 | ∞ |
| Throw away trash | 1 | Move | Take trach from the table and throw it away in the bin | Trash | M | ∞ | 50 | ∞ |
| Turn on light | 1 | Turn on | Turn on light | Lamp | L | ∞ | ∞ | 5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jung, Y.; Kim, H.; Suh, K.-D.; Park, J.-M. Human-Centered Dynamic Service Scheduling Approach in Multi-Agent Environments. Appl. Sci. 2022, 12, 10850. https://doi.org/10.3390/app122110850
Jung Y, Kim H, Suh K-D, Park J-M. Human-Centered Dynamic Service Scheduling Approach in Multi-Agent Environments. Applied Sciences. 2022; 12(21):10850. https://doi.org/10.3390/app122110850
Chicago/Turabian StyleJung, Yunseo, Hyunju Kim, Kyung-Duk Suh, and Jung-Min Park. 2022. "Human-Centered Dynamic Service Scheduling Approach in Multi-Agent Environments" Applied Sciences 12, no. 21: 10850. https://doi.org/10.3390/app122110850
APA StyleJung, Y., Kim, H., Suh, K. -D., & Park, J. -M. (2022). Human-Centered Dynamic Service Scheduling Approach in Multi-Agent Environments. Applied Sciences, 12(21), 10850. https://doi.org/10.3390/app122110850