
Discontinuity Recognition and Information Extraction of High and Steep Cliff Rock Mass Based on Multi-Source Data Fusion


 and
and
Abstract
:1. Introduction
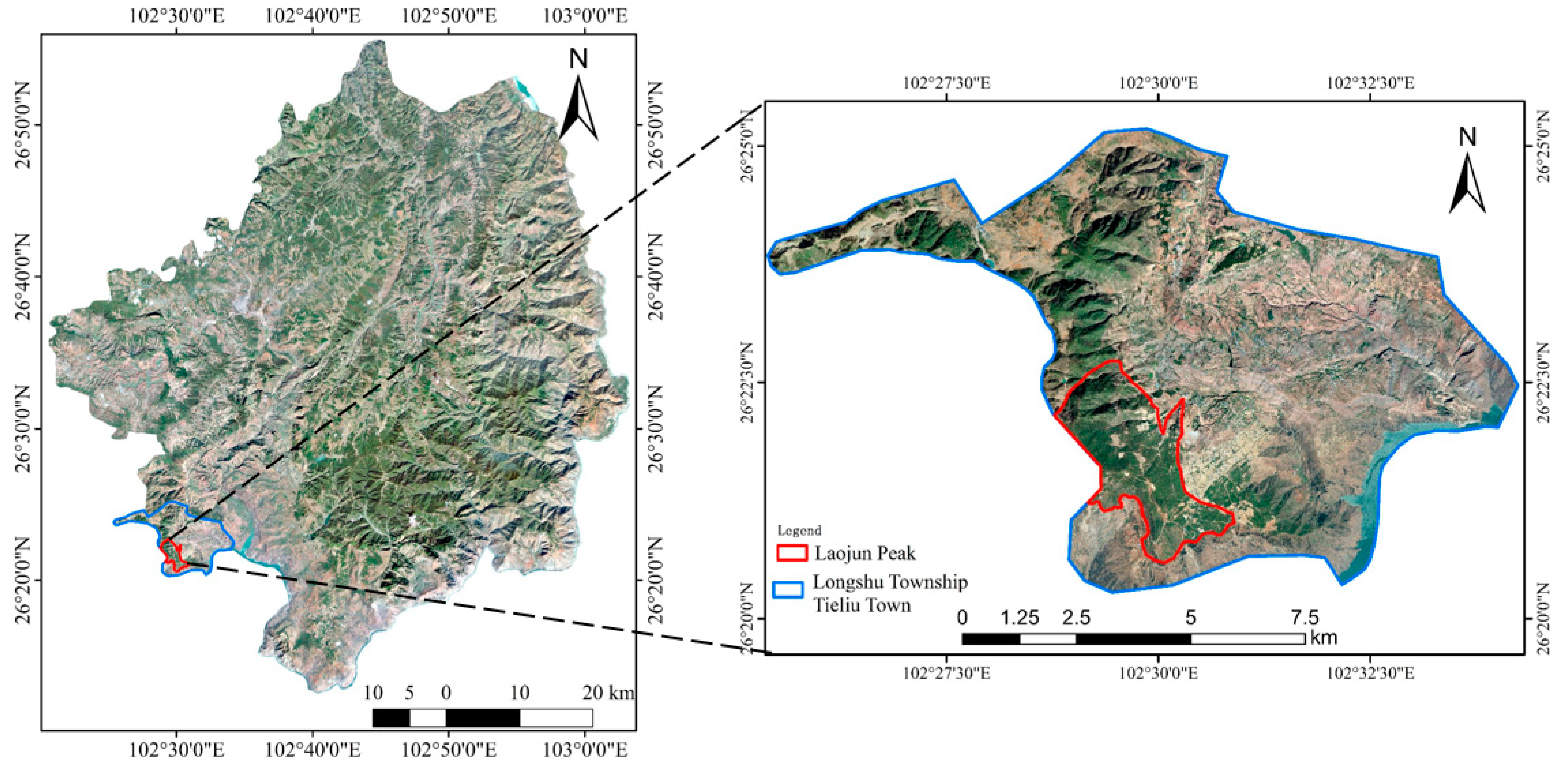
2. Study Area
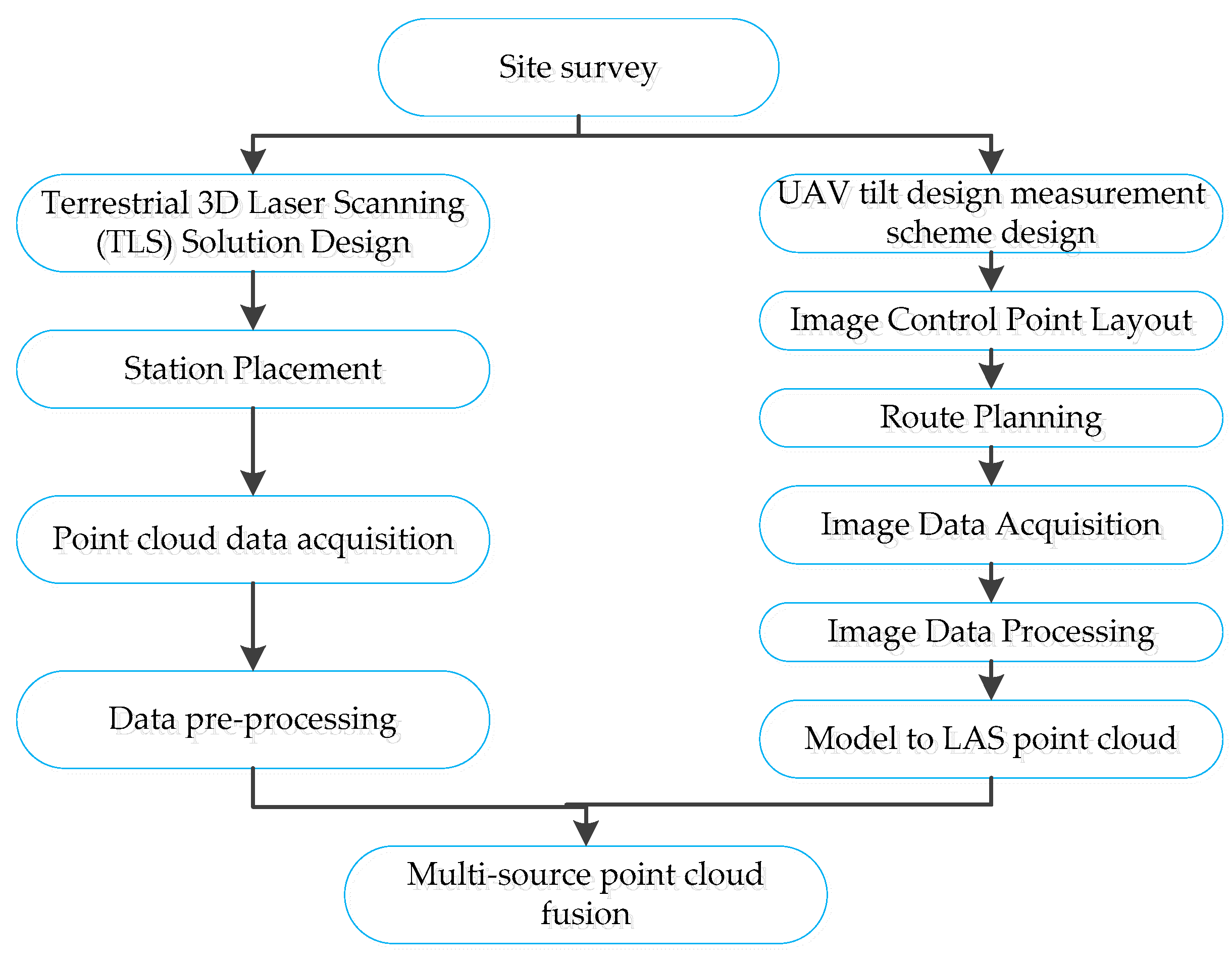
3. Data Acquisition and Processing
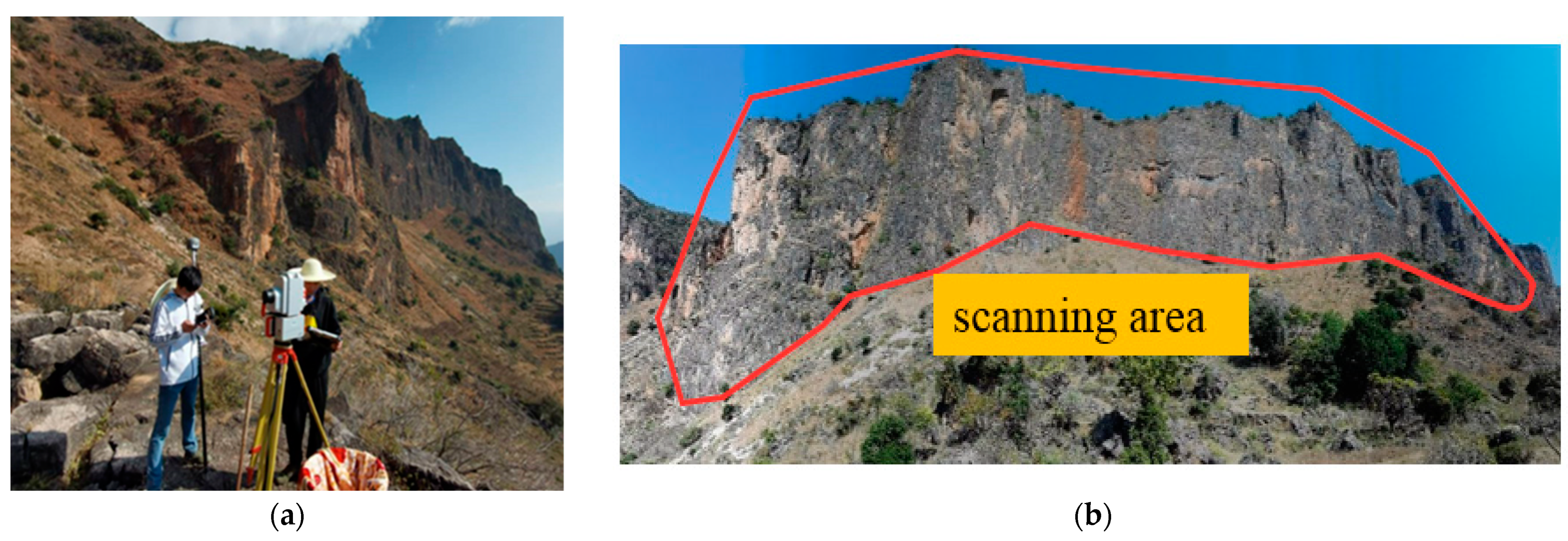
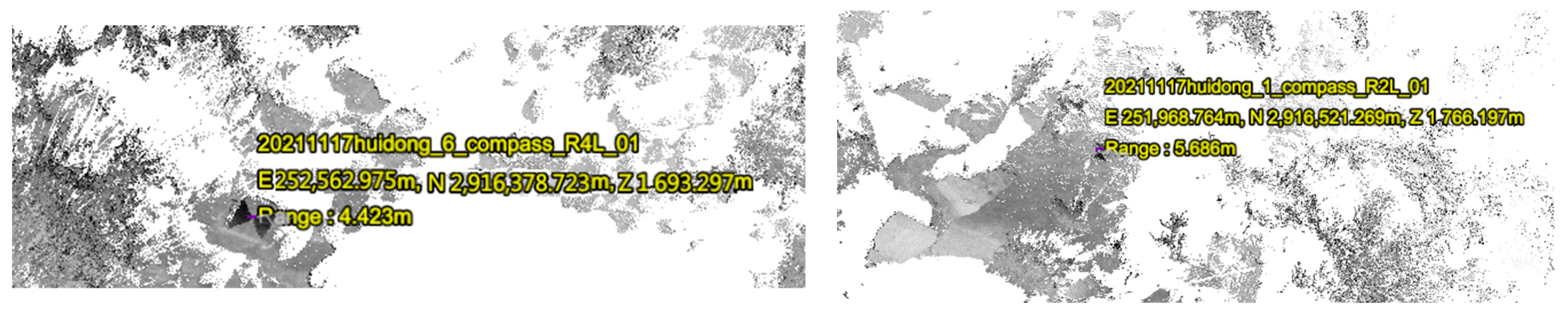
3.1. Ground 3D Laser Scanning Point Cloud Data and Pre-Processing
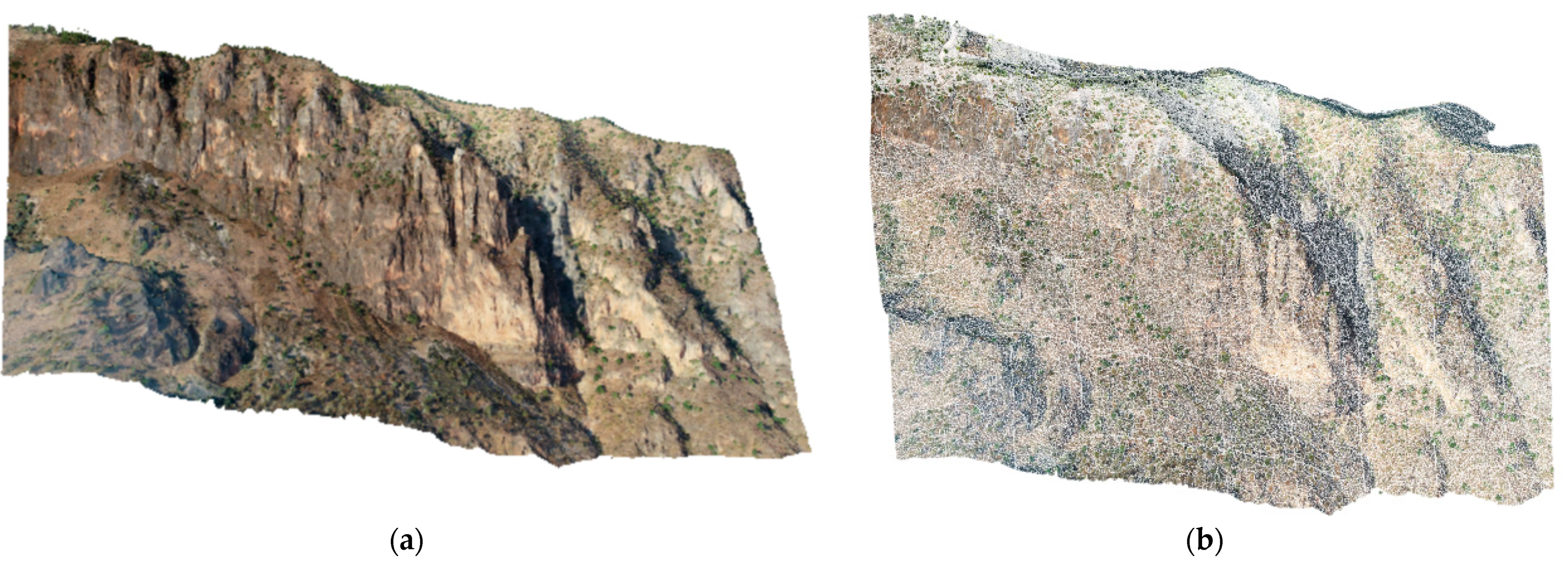
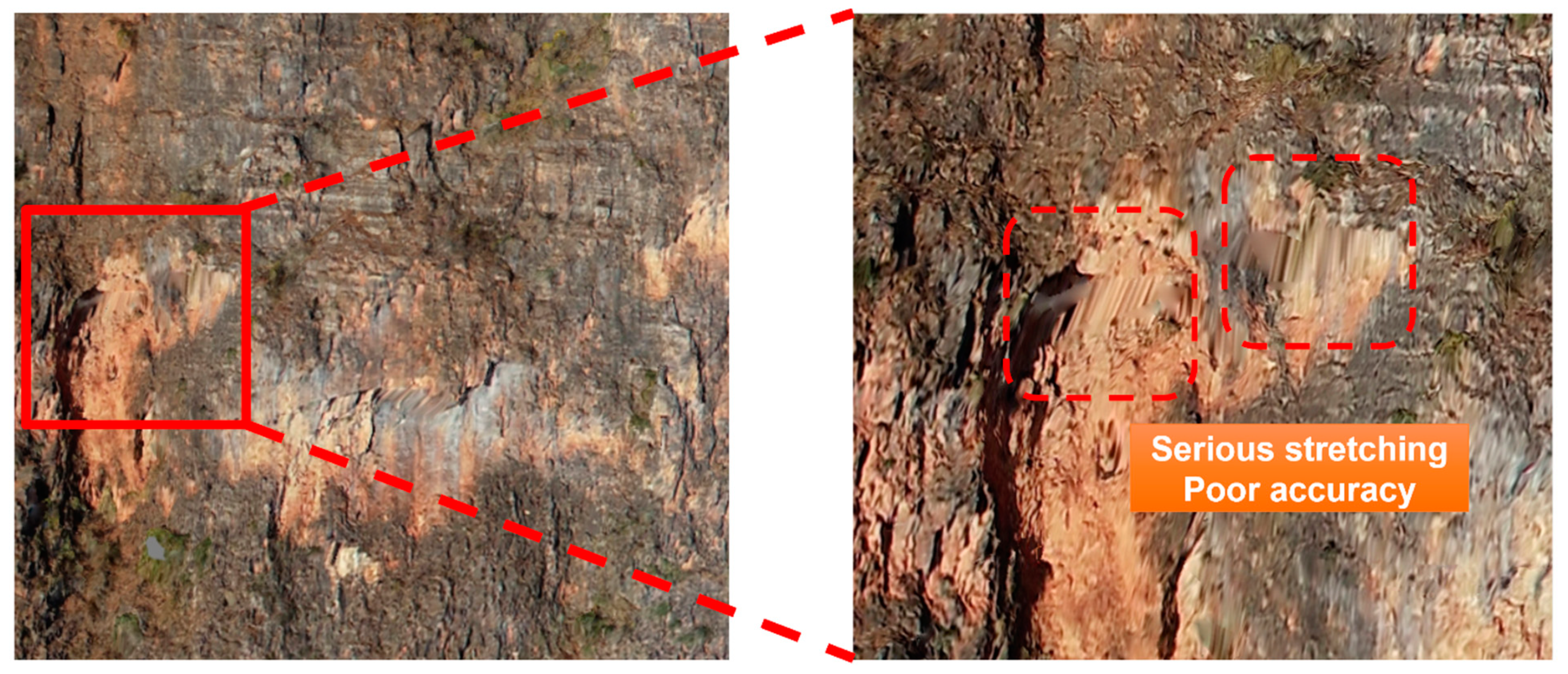
3.2. UAV Photogrammetry Data Acquisition and Pre-Processing
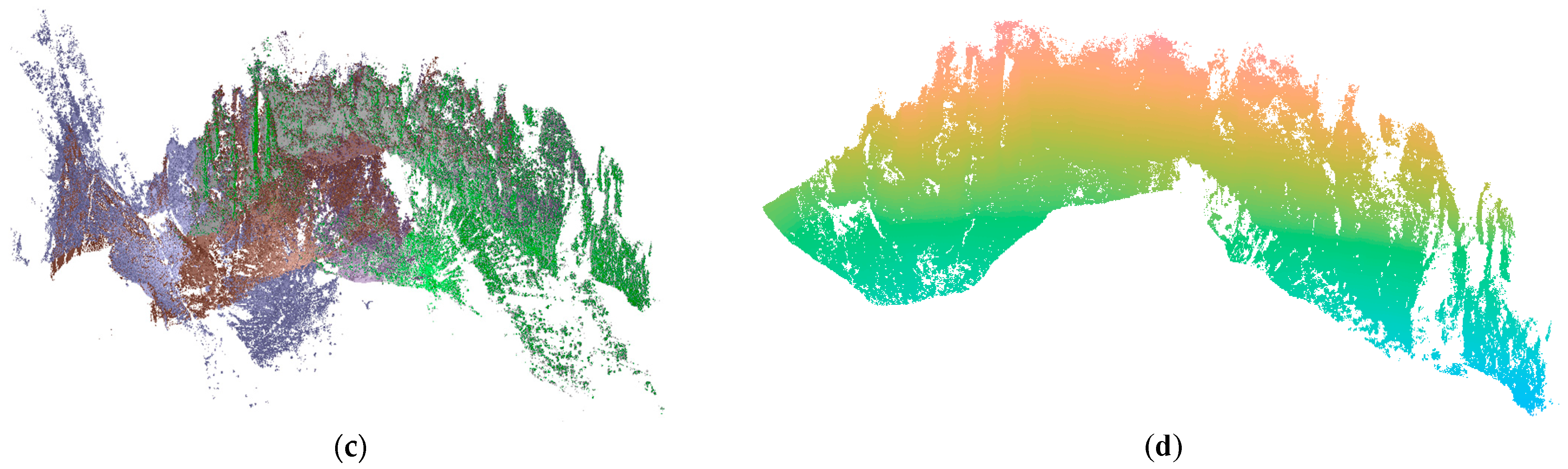
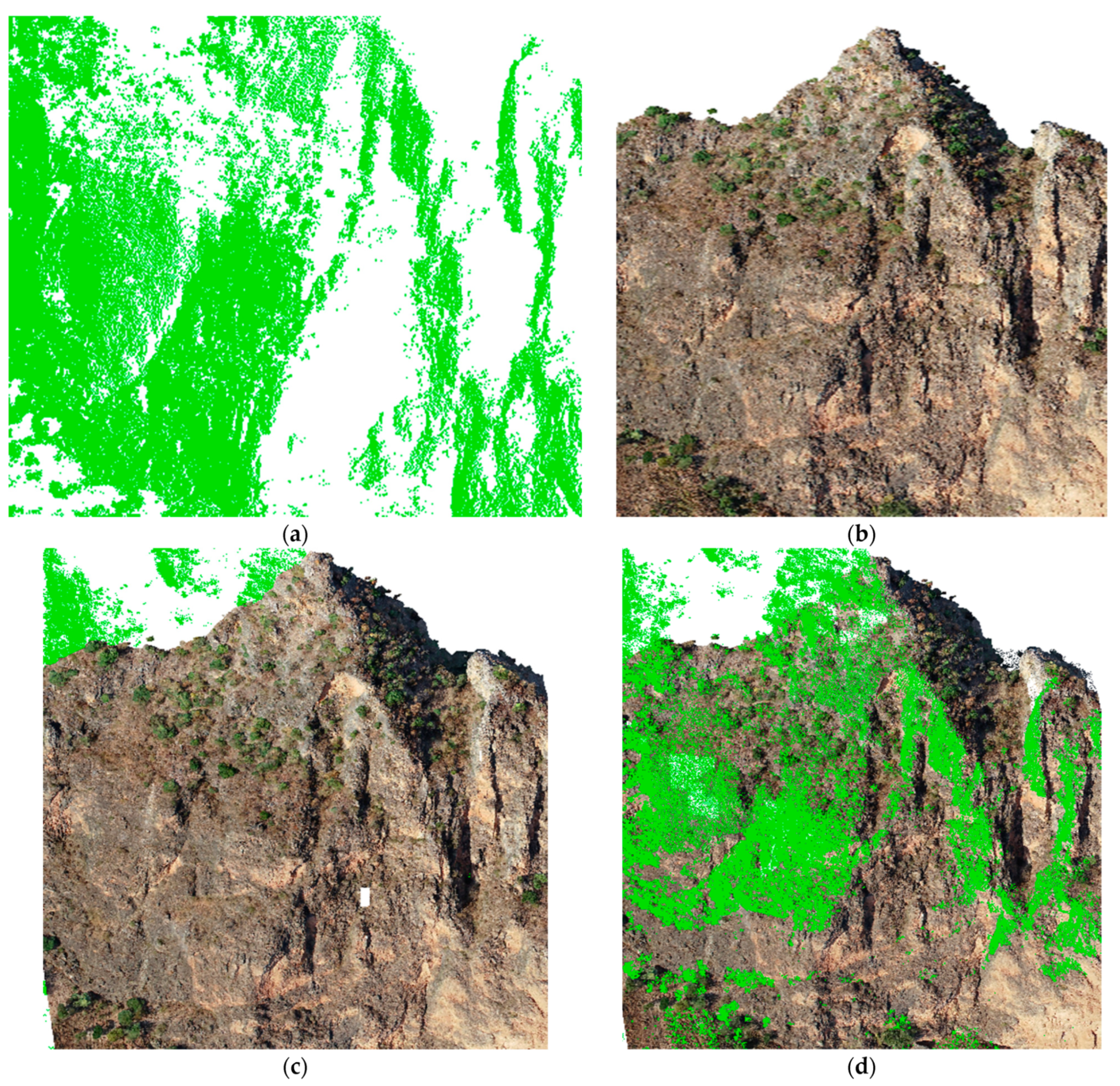
3.3. Multi-Source Point Cloud Fusion
- (1)
- Set the initial value of rigid body transformation , where is the initial rotation matrix and is the initial translation vector;
- (2)
- Let and the dynamic iteration coefficient ;
- (3)
- Estimate the rotation angle boundary , where is the mean value of the rotation angle and is the deviation value of the rotation angle;
- (4)
- Calculate the rotation matrix and the translation vector matrix , and calculate ;
- (5)
- Calculate the amount of change in two adjacent iterations ;
- (6)
- Calculate to obtain a new rigid body transformation matrix ;
- (7)
- Root-mean-square-error judgment: if , then ; if or , then the algorithm terminates and the iteration ends, where is the set threshold and is the number of iterations.
4. Intelligent Identification and Information Extraction of Rock Discontinuities
4.1. Point Cloud Normal Vector Calculation
4.2. HSV 3D Reconstruction and Clustering Analysis
4.3. Rock Discontinuity Surface Parameter Extraction
- (1)
- Spacing
- (2)
- Continuity
4.4. Accuracy Check
5. Results and Analysis
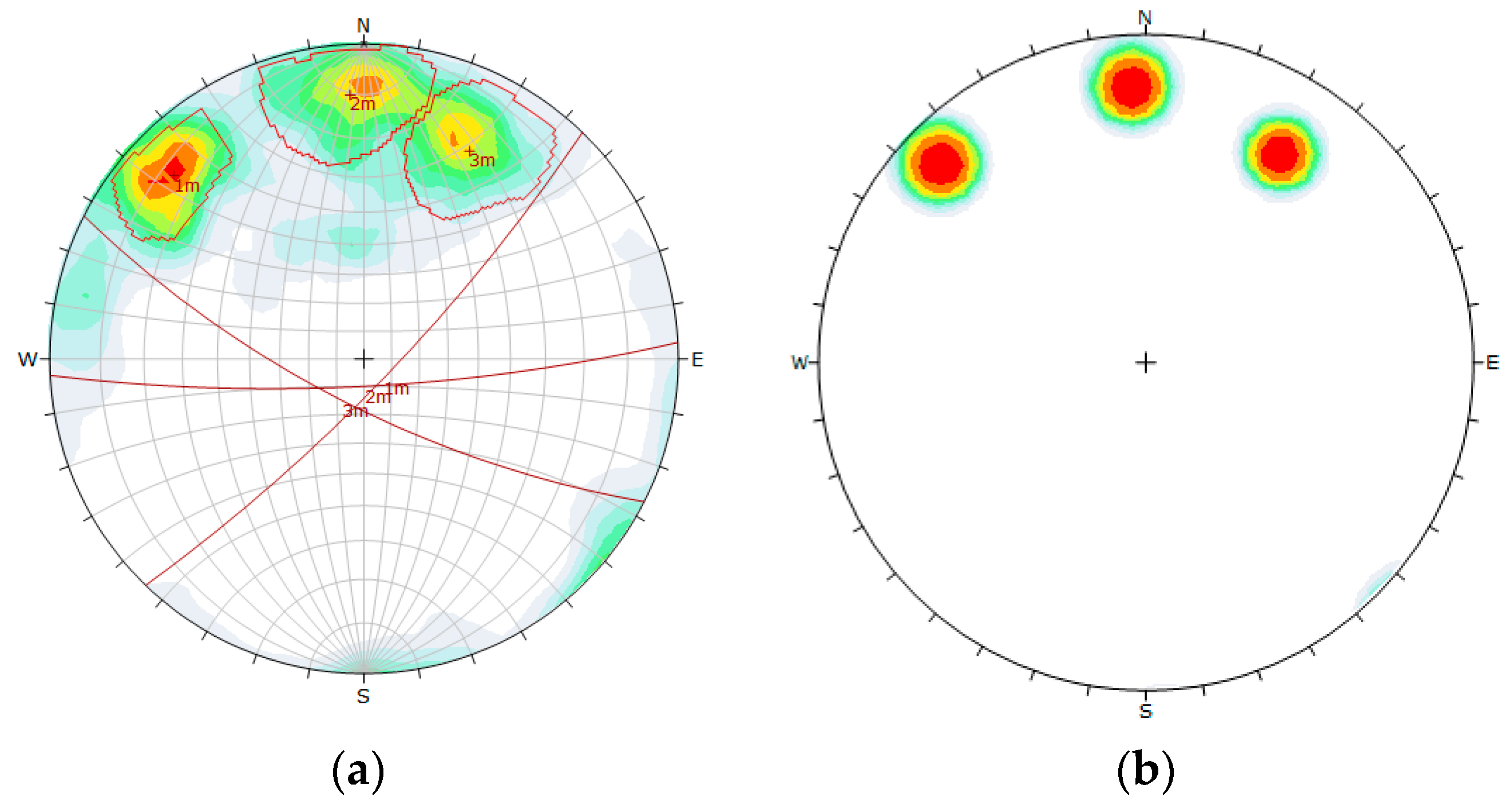
5.1. Grouping of Rock Discontinuity Surfaces
5.2. Rock Discontinuity Face Spacing
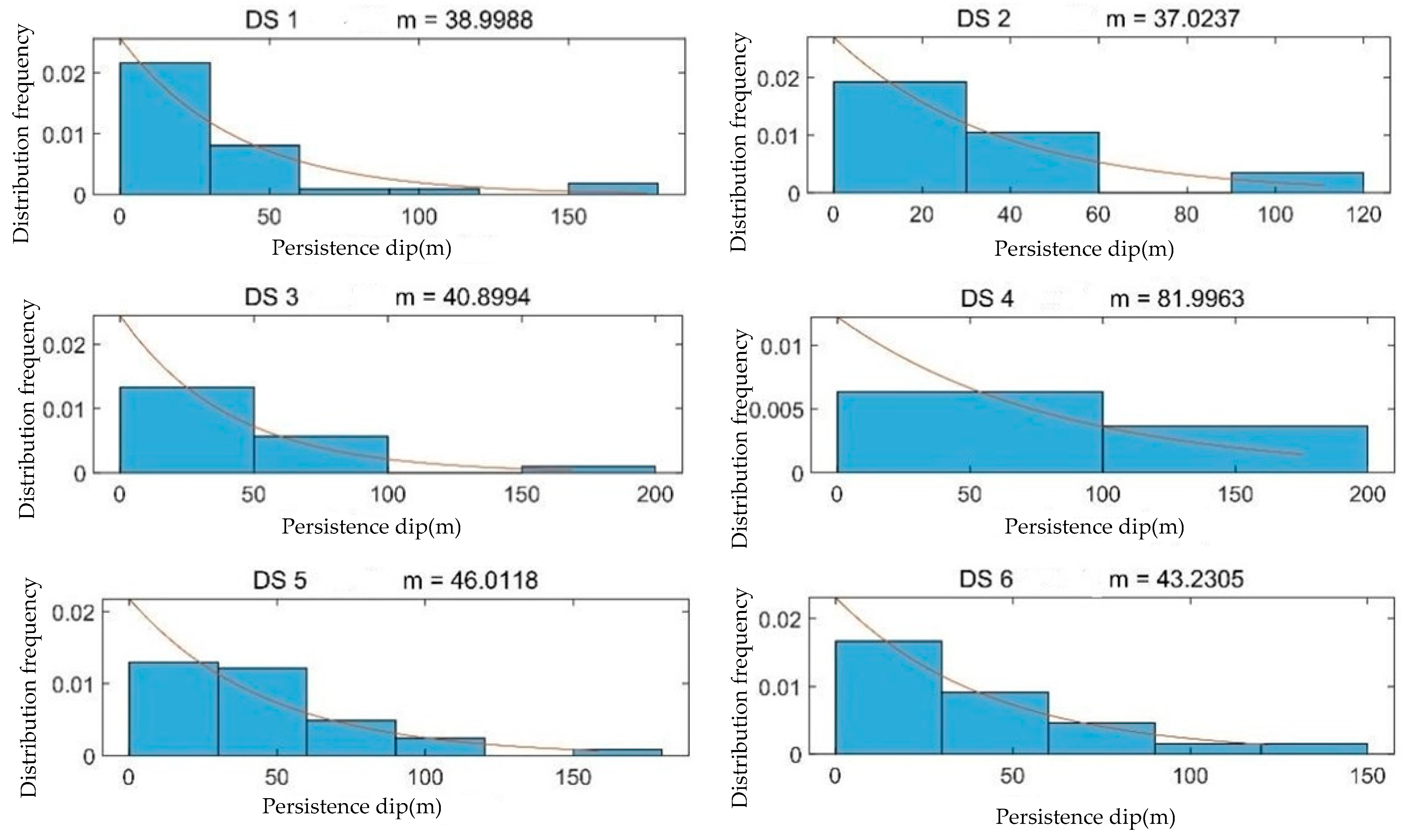
5.3. Continuity of Rock Discontinuity Surface
6. Discussion
- (1)
- Multi-source point cloud fusion technology ensures the accuracy and efficiency of rock mass point cloud data acquisition. In past studies, almost all scholars used a single method to obtain three-dimensional point cloud data of rock masses and extract rock discontinuities. For example, Ye [3], Ge [11], and Ning [31] all adopted ground 3D laser scanning technology or UAV photogrammetry technology to obtain 3D point cloud data of rock masses in the study area. However, in most cases, a single way of measuring easily leads to obtaining point cloud data that are incomplete or have poor precision. For example, Liang [10] once pointed out that the accuracy of ground three-dimensional laser scanning technology is higher, but it is greatly influenced by the rock mass discontinuity surface inclination. This is followed by the small-angle laser launch of the rock mass discontinuity, whose data quality is poorer. Point cloud data holes easily appear, and a variety of ways should be used for supplementary testing. Therefore, our proposed multi-source point cloud fusion technology ensures the integrity and accuracy of rock mass point cloud data. However, there are drawbacks to this approach. If the cavity region of the 3D laser scanning point cloud and the distorted region of UAV photogrammetry data are in the same position, the multi-source point cloud fusion method will lose its function. Therefore, in the early stage of measurement, it is necessary to carry out a field survey and make a complete measurement plan.
- (2)
- Based on the 3D point cloud, the normal vector of the point cloud is calculated using an improved nearest-neighbor search algorithm and transformed into the rock body yield (dip angle and dip direction). Combined with KDE and DBSCAN clustering algorithms, the rock body discontinuities are grouped dominantly and the yield spacing and continuity of the rock body are calculated. This method can quickly obtain the rock mass production information, and the results are similar to the measured production and meet the accuracy requirements. In addition, this method can greatly reduce the geologists’ field workload and lower the time cost. However, this method also has some drawbacks, as Chen et al. [15] pointed out; when discontinuous surfaces are extracted from 3D point clouds and clustered using the DBSCAN algorithm, although the method has good robustness to noisy points, it still needs to combine density peaks and manually set the number of clusters, and the degree of automation and intelligence needs to be improved.
7. Conclusions
- (1)
- Ground 3D laser scanning and UAV photogrammetry technology can rapidly and efficiently obtain high-density, high-precision 3D point cloud information under complex geological environment conditions. However, both technologies have their drawbacks. The ground 3D laser scanning technology can achieve highly precise measurement with a scanning error of 2 mm–6 mm, but it is difficult to obtain complete point clouds under complex terrain environments such as those with large height differences. The UAV tilt photogrammetry technology is prone to camera distortion and blurred images, which leads to low measurement accuracy and large data errors. By adopting the unified coordinate system and improved ICP algorithm for point cloud fusion, the photogrammetric point cloud is used to supplement the missing part of the 3D laser point cloud, which not only ensures data integrity but also data accuracy. The fusion accuracy error is less than 2.8 m with a better fusion effect. This method can provide an accurate data source for the intelligent identification of discontinuous surfaces of special geological rock masses, such as high and steep cliffs, and ensures the accuracy of the identification. This is of great importance in geological investigations.
- (2)
- The spatial index is established by the Kd-tree algorithm, and the optimal scale of the adaptive neighborhood is obtained by neighborhood information entropy, which overcomes the problem of over-segmentation or under-segmentation of point clouds brought by too large or too small a neighborhood radius K, and ensures the accuracy of the point cloud normal vector and rock mass orientation calculation.
- (3)
- Based on the multi-source fusion of point clouds, we use an improved KNN search algorithm, a KDE algorithm combined with the DBSCAN algorithm, to intelligently extract rock discontinuity surface information, which provides a complete technical process and method to obtain highly precise rock mass orientation information under complex geological conditions. It helps to further analyze rock stability.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ning, H. Identification and Information Extraction of Rock Discontinuity Surface Based on 3D Laser Scanning. Master’s Thesis, Chengdu University of Technology, Chengdu, China, 2020. [Google Scholar]
- Jia, S.G.; Jin, A.B.; Zhao, Y.Q. Application of UAV photogrammetry in geological investigation of high and steep slopes. Geotechnics 2018, 39, 1130–1136. [Google Scholar]
- Ye, Z.; Xu, Q.; Liu, Q.; Dong, X.J.; Wang, X.C.; Ning, H. Application of Unmanned Aerial Vehicle Oblique Photogrammetry to Investigation of High Slope Rock Structure. Geomat. Inf. Sci. Wuhan Univ. 2020, 45, 1739–1746. [Google Scholar]
- Xu, D.; Feng, X.T.; Li, S.J.; Wu, S.Y.; Qiu, S.L.; Zhou, Y.Y.; Gao, Y.H. Research on key information extraction technology of deformation and damage characteristics of rock masses in Jinping underground laboratory based on 3D laser scanning. Geotech. Mech. 2017, 38, 488–495. [Google Scholar]
- Feng, M. Research on 3D Modeling and Rock Joint Information Extraction of High Steep Cliffs. Master’s Thesis, Kunming University of Science and Technology, Kunming, China, 2020. [Google Scholar]
- Jing, H.D.; Li, Y.H.; Zhang, Z.H.; Liu, Z.S. Information extraction of rock discontinuity surface based on 3D laser scanning. J. Northeast. Univ. 2015, 36, 280–283. [Google Scholar]
- Li, S.J.; Feng, X.T.; Wang, C.Y.; Hudson, J.A. ISRM suggested method for rock fractures observations using a borehole digital optical televiewer. Rock Mech. 2013, 46, 635–644. [Google Scholar] [CrossRef]
- Wu, X. Geometric Information Extraction of Rock Mass Structural Plane Based on 3D Laser Point Cloud. Master’s Thesis, Jilin University, Changchun, China, 2022. [Google Scholar]
- Ge, Y.F.; Tang, H.M.; Xia, D.; Wang, L.Q.; Zhao, B.B.; Teaway, J.W.; Chen, H.Z.; Zhou, T. Automated measurements of discontinuity geometric properties from a 3D-point cloud based on a modified region growing algorithm. Eng. Geol. 2018, 242, 44–54. [Google Scholar] [CrossRef]
- Liang, Y.F.; Pei, X.J.; Cui, S.H.; Huang, R.Q.; Li, T.T.; Xu, X.N.; Dong, X.J.; Tan, L.Y.; Yang, H.Y. Structural characteristics analysis of landslide damage boundary rock based on ground 3D laser point cloud. J. Rock Mech. Eng. 2021, 40, 1209–1225. [Google Scholar]
- Ge, Y.F.; Xia, D.; Tang, H.M.; Zhao, B.B.; Wang, L.Q.; Chen, Y. Intelligent identification and extraction of geometric properties of rock discontinuities based on terrestrial laser scanning. Chin. J. Rock Mech. Eng. 2017, 36, 3050–3061. [Google Scholar]
- Chen, N.; Cai, X.M.; Xia, J.W.; Zhang, S.H.; Jiang, Q.H.; Shi, C. Intelligent interpretation of rock discontinuity surfaces based on 3D laser point cloud technology. Geoscience 2021, 46, 2351–2361. [Google Scholar]
- Zhang, P.; Du, K.; Tannant, D.D.; Zhu, H.H.; Zheng, W.B. Automated method for extracting and analysing the rock discontinuities from point clouds based on digital surface model of rock mass. Eng. Geol. 2018, 239, 109–118. [Google Scholar] [CrossRef]
- Wang, P.T.; Tan, T.; Huang, Z.J.; Ren, F.H.; Cai, M.F. Research on rapid identification method of rock discontinuity information based on 3D point cloud. J. Rock Mech. Eng. 2021, 40, 503–519. [Google Scholar]
- Chen, J.Q.; Zhu, H.H.; Li, X.J. Automatic extraction of discontinuity orientation from rock mass surface 3D point cloud. Comput. Geosci. 2016, 95, 18–31. [Google Scholar] [CrossRef]
- Li, Z.B.; Xia, Y.H.; Bai, H.Q. MAPTEK I-Site 8200ER 3D laser scanner goniometric accuracy study. J. Zhejiang Agric. Sci. 2017, 58, 1462–1464. [Google Scholar]
- Yang, B.S.; Liang, F.S.; Huang, R.G. Research progress, challenges and trends in 3D laser scanning point cloud data processing. J. Surv. Mapp. 2017, 46, 1509–1516. [Google Scholar]
- Besl, P.J.; McKay, N.D. Method for Registration of 3-D Shapes. In Proceedings of the Sensor Fusion IV: Control Paradigms and Data Structures, Boston, MA, USA, 12–15 November 1991; pp. 586–606. [Google Scholar]
- Zhao, F.Q. Point Cloud Distribution Algorithm Based on Improving ICP. In Research on the Optimal Alignment Method of Point Cloud Model; Harbin Institute of Technology Press: Harbin, China, 2018; pp. 75–76. [Google Scholar]
- Ma, W.F.; Wang, C.; Wang, J.L.; Zhou, J.C.; Ma, Y.Y. A residual clustering method for fine extraction of laser point cloud transmission lines. J. Surv. Mapp. 2020, 49, 883–892. [Google Scholar]
- Dong, X.J. Comprehensive Application Research of 3D Spatial Imaging Technology in Geological Engineering. Ph.D. Thesis, Chengdu University of Technology, Chengdu, China, 2015. [Google Scholar]
- Riquelme, A.J.; Abellán, A.; Tomás, R.; Jaboyedoff, M. A new approach for semi-automatic rock mass joints recognition from 3D point clouds. Comput. Geosci. 2014, 68, 38–52. [Google Scholar] [CrossRef] [Green Version]
- Riquelme, A.; Tomás, R.; Cano, M.; Pastor, J.L.; Abellán, A. Automatic mapping of discontinuity persistence on rock masses using 3D point clouds. Rock Mech. Rock Eng. 2018, 51, 3005–3028. [Google Scholar] [CrossRef]
- Zhao, W.; Tang, C.A. Measurement theory of rock discontinuity face spacing and trace length. China Min. 1998, 3, 36–38. [Google Scholar]
- Fan, L.M.; Huang, R.Q. A new method for estimating the trace length of rock discontinuities and its engineering application. J. Rock Mech. Eng. 2004, 1, 53–57. [Google Scholar]
- Zhao, J.B.; Zhang, Y.S.; Li, X.S. Automatic identification method of rock mass structural plane based on photogrammetric 3D point cloud. Sci. Technol. Eng. 2017, 17, 240–244. [Google Scholar]
- Xu, W.T.; Zhang, Y.S.; Li, X.Z.; Wang, X.Y.; Ma, F.; Zhao, J.B.; Zhang, Y. Extraction and statistics of discontinuity orientation and trace length from typical fractured rock mass: A case study of the Xinchang underground research laboratory site, China. Eng. Geol. 2020, 269, 105553. [Google Scholar] [CrossRef]
- Gao, F.; Chen, D.P.; Zhou, K.P.; Niu, W.J.; Liu, H.W. A fast clustering method for identifying rock discontinuity sets. KSCE J. Civ. Eng. 2019, 23, 556–566. [Google Scholar] [CrossRef]
- Guo, J.T.; Liu, S.J.; Zhang, P.N.; Wu, L.X.; Zhou, W.H.; Yu, Y.N. Towards semi-automatic rock mass discontinuity orientation and set analysis from 3D point clouds. Comput. Geosci. 2017, 103, 164–172. [Google Scholar] [CrossRef]
- Li, S.Q.; Zhang, H.C.; Liu, R.Y. UAV photogrammetry for semi-automatic statistics of rock discontinuity surface production. Sci. Technol. Eng. 2017, 17, 18–22. [Google Scholar]
- Ning, H.; Dong, X.J.; Liu, Q.; Ye, Z.; Guo, C.; Liang, Y.F. Using point cloud normal vector to realize rock mass structural plane recognition. Geomat. Inf. Sci. Wuhan Univ. 2022, 1–13. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Types | Parameter Indicators |
|---|---|
| Instrument leveling/(″) | 20″ (Built-in compensator) |
| Compass/(°) | ±1 |
| Maximum measuring range/(m) | 500 |
| Minimum measurement range/(m) | 1 |
| Distance accuracy/(mm) | 6 |
| Scanning Range/(m) | Vertical 270°, horizontal 360° |
| Angular Resolution/(°) | 0.2–0.025 |
| Point | GPS Measured Coordinates | Point Cloud Coordinates | Error | ||||
|---|---|---|---|---|---|---|---|
| X/m | Y/m | Z/m | X/m | Y/m | Z/m | ||
| B1 | 551,379.119 | 2,915,387.696 | 1729.519 | 251,963.699 | 2,916,511.864 | 1766.708 | 0.031748 |
| B2 | 551,383.922 | 2,915,397.262 | 1729.033 | 251,968.764 | 2,916,521.269 | 1766.197 | 0.031388 |
| B3 | 551,516.047 | 2,915,430.586 | 1687.368 | 252,101.554 | 2,916,551.698 | 1724.605 | 0.045522 |
| B4 | 551,975.125 | 2,915,260.500 | 1654.448 | 252,557.497 | 2,916,368.768 | 1691.321 | 0.026318 |
| B5 | 551,980.360 | 2,915,270.591 | 1656.444 | 252,562.979 | 2,916,378.712 | 1693.298 | 0.014648 |
| Discontinuity Set | Clustering Results | Riquelme Method | Error | |||
|---|---|---|---|---|---|---|
| Dip (°) | Direction (°) | Dip (°) | Direction (°) | Dip (°) | Direction (°) | |
| 1 | 80 | 134 | 81.213 | 133.857 | 1.213 | −0.143 |
| 2 | 80 | 177 | 80.015 | 177.354 | 0.015 | 0.354 |
| 3 | 73 | 209 | 70.330 | 209.214 | 0.330 | 0.214 |
| J1 | J2 | J3 | J4 | J5 | J6 | |
|---|---|---|---|---|---|---|
| Discontinuous face spacing of continuous lower rock mass | 9.09 | 19.0 | 14.96 | 32.38 | 9.38 | 11.70 |
| Discontinuous face spacing of discontinuous lower rock mass | 4.46 | 6.58 | 6.91 | 31.33 | 2.47 | 7.14 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, X.; Xia, Y.; Wu, X.; Wang, Z.; Yang, K.; Yan, M.; Li, C.; Tai, H. Discontinuity Recognition and Information Extraction of High and Steep Cliff Rock Mass Based on Multi-Source Data Fusion. Appl. Sci. 2022, 12, 11258. https://doi.org/10.3390/app122111258
Kong X, Xia Y, Wu X, Wang Z, Yang K, Yan M, Li C, Tai H. Discontinuity Recognition and Information Extraction of High and Steep Cliff Rock Mass Based on Multi-Source Data Fusion. Applied Sciences. 2022; 12(21):11258. https://doi.org/10.3390/app122111258
Chicago/Turabian StyleKong, Xiali, Yonghua Xia, Xuequn Wu, Zhihe Wang, Kaihua Yang, Min Yan, Chen Li, and Haoyu Tai. 2022. "Discontinuity Recognition and Information Extraction of High and Steep Cliff Rock Mass Based on Multi-Source Data Fusion" Applied Sciences 12, no. 21: 11258. https://doi.org/10.3390/app122111258