
Edge Restoration of a 3D Building Model Based on Oblique Photography
Abstract
:1. Introduction
2. Materials and Methods
2.1. Data Acquisition and Presentation
2.2. A Method of Edge Line Restoration Based on Cutting Triangular Patches
2.2.1. Drawing the Outer Cylinder of the Edge Line and Intersection Detection
2.2.2. Construction of the Fitting Plane and Projection Plane
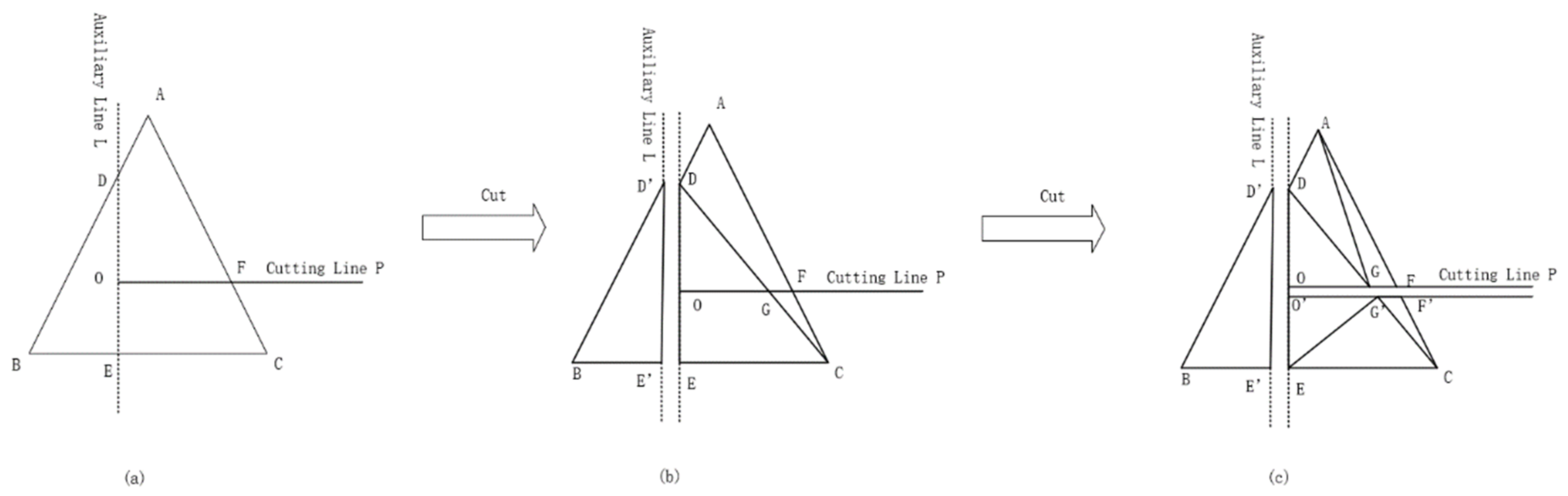
2.2.3. Triangle Cutting
2.2.4. Three-Dimensional Model Reconstruction
3. Experimental Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, D.R.; Shao, Z.F.; Yang, X.M. Theory and Practice from Digital City to Smart City. Geospat. Inf. 2011, 9, 2. [Google Scholar]
- Song, Y.S. Cultural Assets Reconstruction Using Efficient 3D-Positioning Method for Tourism Geographic Information System. J. Tour. Leis. Res. 2010, 22, 97–111. [Google Scholar]
- Leng, X.; Liu, D.; Luo, J.; Mei, Z. Research on a 3D Geological Disaster Monitoring Platform Based on Rest Service. ISPRS Int. J. Geo-Inf. 2018, 7, 226–244. [Google Scholar] [CrossRef] [Green Version]
- Singla, J.G.; Padia, K. A Novel Approach for Generation and Visualization of Virtual 3D City Model Using Open Source Libraries. J. Indian Soc. Remote Sens. 2020, 52, 1239–1244. [Google Scholar] [CrossRef]
- Mademlis, I.; Mygdalis, V.; Nikolaidis, N.; Montagnuolo, M.; Negro, F.; Messina, A.; Pitas, I. High-Level Multiple-UAV Cinematography Tools for Covering Outdoor Events. IEEE Trans. Broadcast. 2019, 65, 627–635. [Google Scholar] [CrossRef]
- Zhang, Z.X.; Zhang, J.Q. Solutions and Core Techniques of City Modeling. World Sci. Technol. R D 2003, 25, 23–29. [Google Scholar]
- Lin, M.; Li, F.Y.; Zhou, H. A Research on the Combination of Oblique Photography and Mobile Applications Based on the Sustainable Development of Tourism. Sustainability 2020, 12, 3501. [Google Scholar] [CrossRef]
- Zhang, R.; Li, H.; Duan, K.F.; You, S.C.; Liu, K.; Wang, F.T.; Hu, Y. Automatic Detection of Earthquake-Damaged Buildings by Integrating UAV Oblique Photography and Infrared Thermal Imaging. Remote Sens. 2020, 12, 2621–2649. [Google Scholar] [CrossRef]
- Verhoeven, G. Taking Computer Vision Aloft-Archaeological Three-Dimensional Reconstructions from Aerial Photographs with Photo scan. Archaeol. Prospect. 2011, 18, 67–73. [Google Scholar] [CrossRef]
- Zhou, X.M.; Meng, X.L.; Zhang, X.P.; MI, Y.H. A method for urban real 3D model building based on oblique photogrammetry. Sci. Surv. Mapp. 2016, 41, 159–163. [Google Scholar]
- Jung, J.; Jwa, Y.; Sohn, G. Implicit Regularization for Reconstructing 3D Building Rooftop Models Using Airborne LiDAR Data. Sensors 2017, 17, 621. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.L.; Chen, S.; Chen, P.X. The study and practice on data quality inspection method of city real 3D model based on oblique photography. Bull. Surv. Mapp. 2019, 2, 108–112. [Google Scholar]
- Dorninger, P.; Pfeifer, N. A Comprehensive Automated 3D Approach for Building Extraction, Reconstruction, and Regularization from Airborne Laser Scanning Point Clouds. Sensors 2008, 8, 7323–7343. [Google Scholar] [CrossRef] [Green Version]
- Xie, L.F.; Zhu, Q.; Hu, H.; Wu, B.; Li, Y.; Zhang, Y.T.; Zhong, R.F. Hierarchical Regularization of Building Boundaries in Noisy Aerial Laser Scanning and Photogrammetric Point Clouds. Remote Sens. 2019, 10, 1996. [Google Scholar] [CrossRef] [Green Version]
- Phan, T. A triangle mesh-based corner detection algorithm for catadioptric images. Imaging Sci. J. 2017, 5, 220–230. [Google Scholar] [CrossRef]
- Zhou, W.; Peng, R.; Dong, J.; Wang, T. Automated extraction of 3D vector topographic feature line from terrain point cloud. Geocarto Int. 2017, 26, 1036–1047. [Google Scholar] [CrossRef]
- Zhao, J.B.; Liu, W.J.; Xia, R.B. An method of feature line extraction of triangle mesh surface model. In Proceedings of the IEEE International Conference on Information and Automation, Shenyang, China, 6–8 June 2012. [Google Scholar]
- Lawonn, K.; Trostmann, E.; Preim, B.; Hildebrandt, K. Visualization and Extraction of Carvings for Heritage Conservation. IEEE Trans. Vis. Comput. Graph. 2017, 23, 801–810. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Dai, N.; Zhong, B.; Li, T.; Wang, J. Extract feature curves on noisy triangular meshes. Graph. Models 2017, 93, 1–13. [Google Scholar] [CrossRef]
- Hu, S.M.; Yang, Y.L.; Lai, Y.K. Research Progress of Digital Geometry Processing. Chin. J. Comput. 2009, 32, 1451–1469. [Google Scholar]
- Ohtake, Y.; Belyaev, A.; Seidel, H. Ridge-valley lines on meshes via implicit surface fitting. In Proceedings of the ACM Transactions on Graphics, Grenoble, France, 27–29 August 2004. [Google Scholar]
- Tsuchie, S.; Higashi, M. Extraction of Surface-feature Lines on Meshes Using Normal Tensor Framework. Comput. Aided Des. Appl. 2014, 2, 172–181. [Google Scholar] [CrossRef]
- Rother, C.; Kolmogorov, V.; Blake, A. “Grab-Cut”: Interactive Foreground Extraction Using Iterated Graph Cuts. In Proceedings of the ACM Transactions on Graphics, Grenoble, France, 27–29 August 2004. [Google Scholar]
- Lv, C.; Wu, Z.; Wang, X.; Zhou, M.; Toh, K. Nasal Similarity Measure of 3d Faces Based on Curve Shape Space. Pattern Recognit. 2019, 88, 458–469. [Google Scholar] [CrossRef]
- Shang, Q.S. Feature Line Constrained Edge Restoration of Oblique Photogrammetric 3D Models. Master’s Thesis, Southwest Jiaotong University, Chengdu, China, May 2019. [Google Scholar]
- Wang, Y.; Hao, X.Y.; Li, Y. Study of method for achieving 3D model to be single based on oblique photogrammetry image. Comput. Eng. Appl. 2018, 54, 178–183. [Google Scholar]
- Zhang, H.X.; Li, H.; Li, J.H.; Zhao, F. Simplification of tilt photogrammetry 3D model and service release. Bull. Surv. Mapp. 2021, 67, 79–82. [Google Scholar]
- Aubel, A.; Boulic, R.; Thalmann, D. Real-time display of virtual humans: Levels of details and impostors. IEEE Trans. Circuits Syst. Video Technol. 2000, 10, 207–217. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.F. Research on the Key Algorithm of 3D Real-Time Dynamic Multisolution Display of Large-Scale Terrain. Ph.D. Thesis, Wuhan University, Wuhan, China, May 2011. [Google Scholar]
- Biljecki, F.; Ledoux, H.; Stoter, J. An improved LOD specification for 3D building models. Comput. Environ. Urban Syst. 2016, 59, 25–37. [Google Scholar] [CrossRef]
- Bai, L.F.; Chang, C.W.; Wang, Y.T. Intersect Test Algorithm of Oriented Bounding Box Based on Effective Constraint. J. Comput. Aided Des. Comput. Graph. 2016, 28, 1757–1766. [Google Scholar]
- Sun, J.G.; Wu, S.H. Collision detection algorithm based on ellipsoid bounding box and spatial decomposition. Comput. Eng. Appl. 2016, 52, 217–222. [Google Scholar]
- Hu, X.; Huang, M.; Zhou, H.X. Automated extracting highway from mobile laser scanning point clouds. Sci. Surv. Mapp. 2019, 44, 101–106. [Google Scholar]
- Wen, P.Z.; Lei, Y.Q.; Sun, M.L. Defective hole identification and hole-filling for 3D reconstruction mesh models. Appl. Res. Comput. 2020, 37, 1234–1238. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Parameters of Computer Performance | Simplex Method of Triangulation | Method in This Paper |
|---|---|---|
| Computer CPU | INTEL CORE I7-12700H | INTEL CORE I7-12700H |
| Computer memory | 16 GB | 16 GB |
| GPU | Nvidia RTX 3060ti | Nvidia RTX 3060ti |
| Time consumption | 10 min | 3.5 min |
| Memory consumption | 53% | 28% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Che, D.; He, K.; Qiu, K.; Liu, Y.; Ma, B.; Liu, Q. Edge Restoration of a 3D Building Model Based on Oblique Photography. Appl. Sci. 2022, 12, 12911. https://doi.org/10.3390/app122412911
Che D, He K, Qiu K, Liu Y, Ma B, Liu Q. Edge Restoration of a 3D Building Model Based on Oblique Photography. Applied Sciences. 2022; 12(24):12911. https://doi.org/10.3390/app122412911
Chicago/Turabian StyleChe, Defu, Kai He, Kehan Qiu, Yining Liu, Baodong Ma, and Quan Liu. 2022. "Edge Restoration of a 3D Building Model Based on Oblique Photography" Applied Sciences 12, no. 24: 12911. https://doi.org/10.3390/app122412911