


Offloading Strategy of Multi-Service and Multi-User Edge Computing in Internet of Vehicles

Abstract
:1. Introduction
2. Related Work
3. Optimization of Vehicle Edge System Model
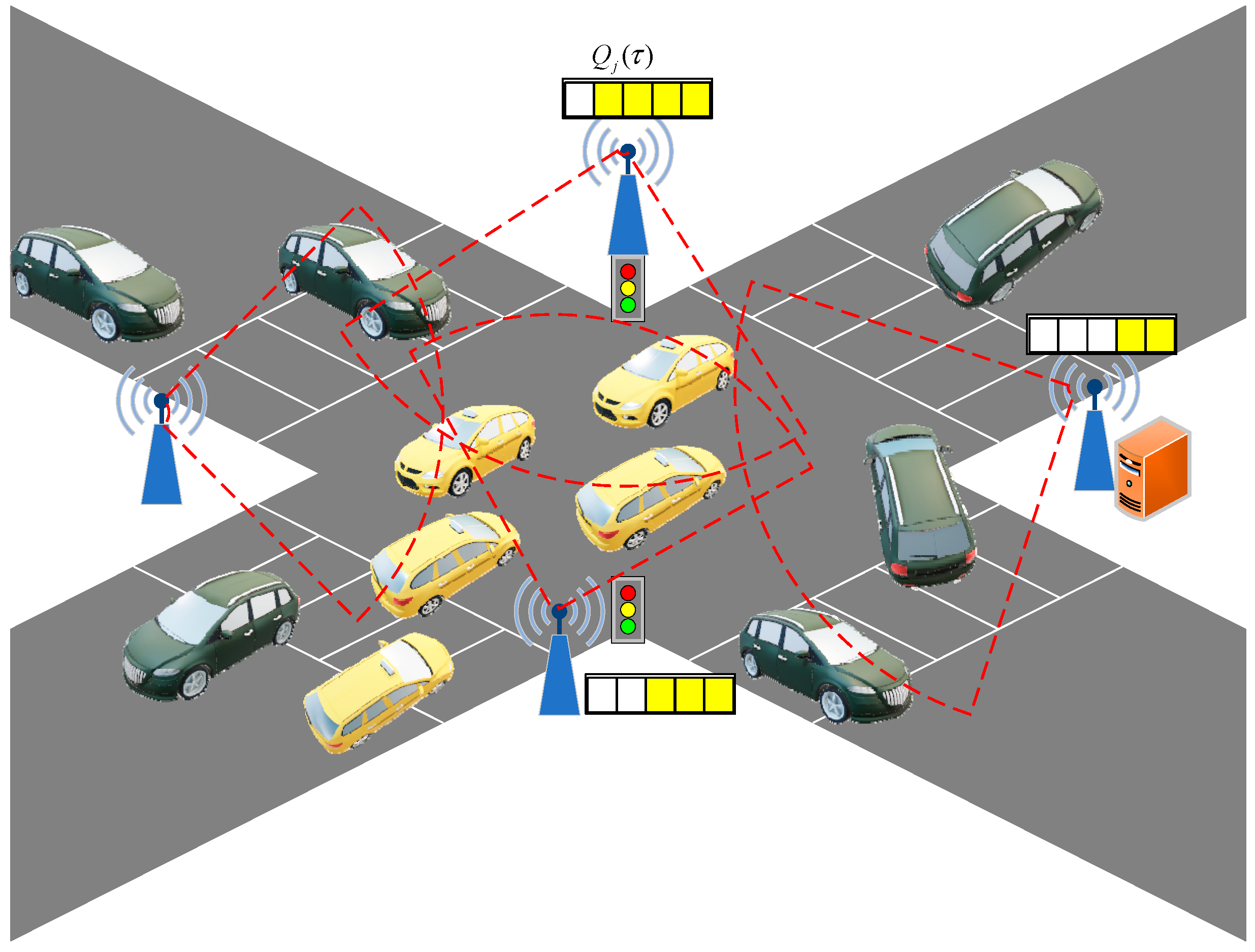
3.1. System Model
- (1)
- Local Computation
- (2)
- Unloading calculation
3.2. Optimization Model
4. Edge Computing Offloading Method in Internet of Vehicles
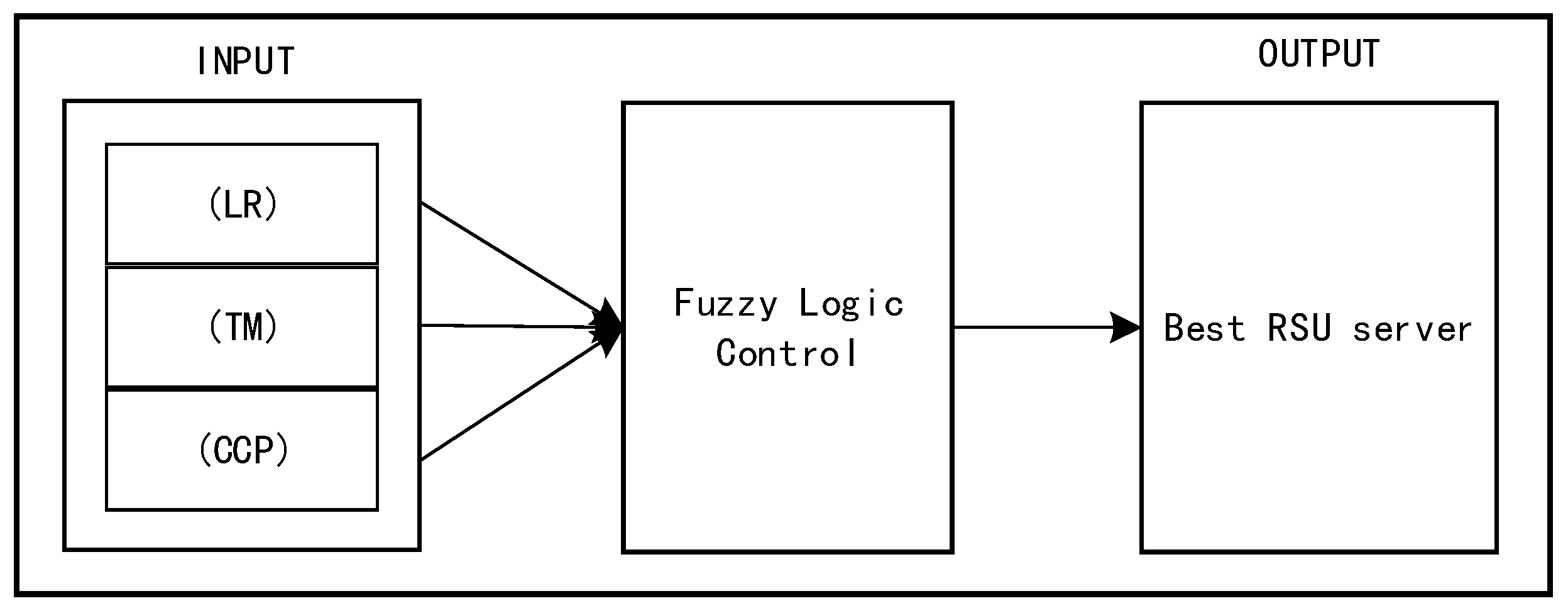
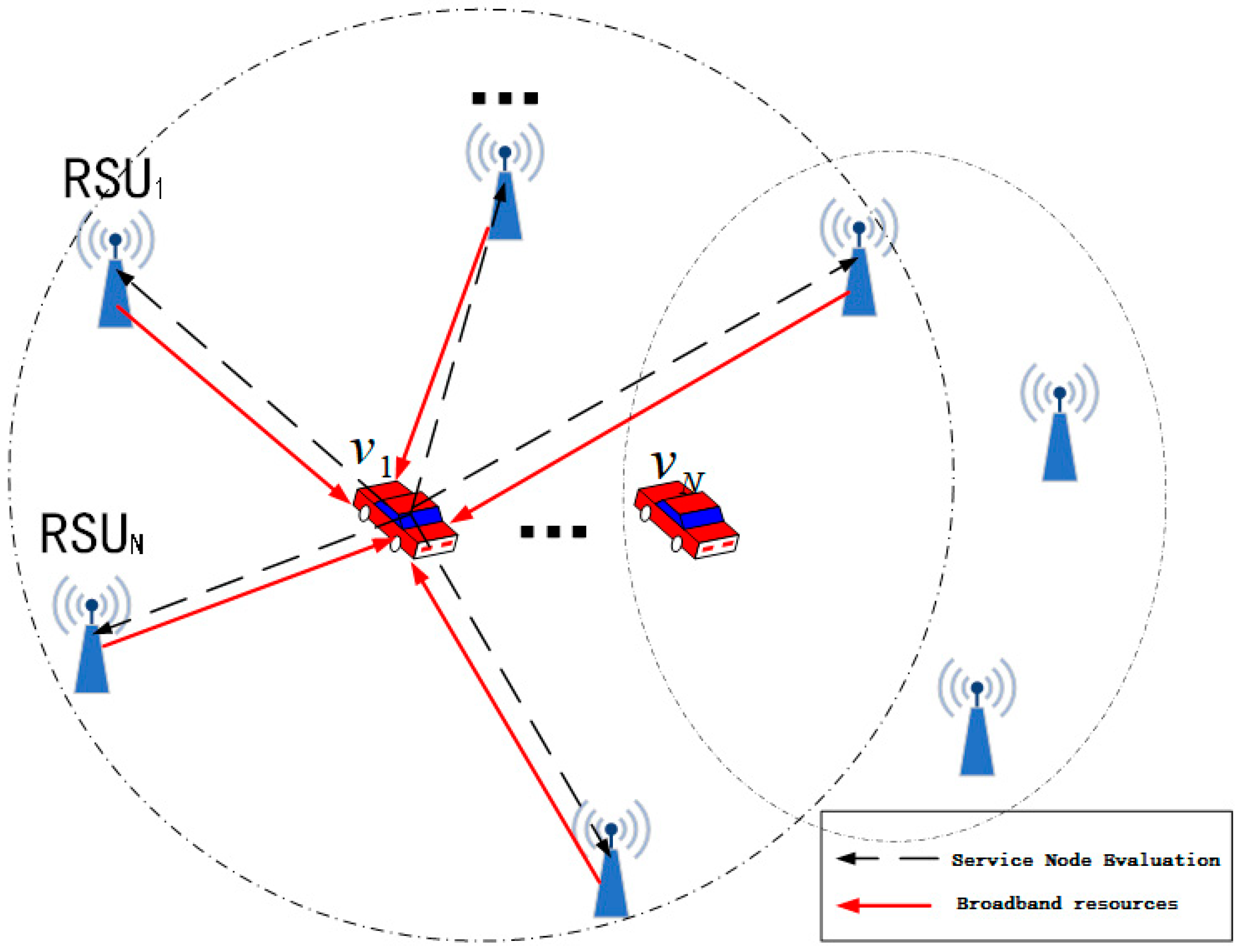
4.1. Edge Service Node Selection
- (1)
- LR
- (2)
- TM
- (3)
- CCP
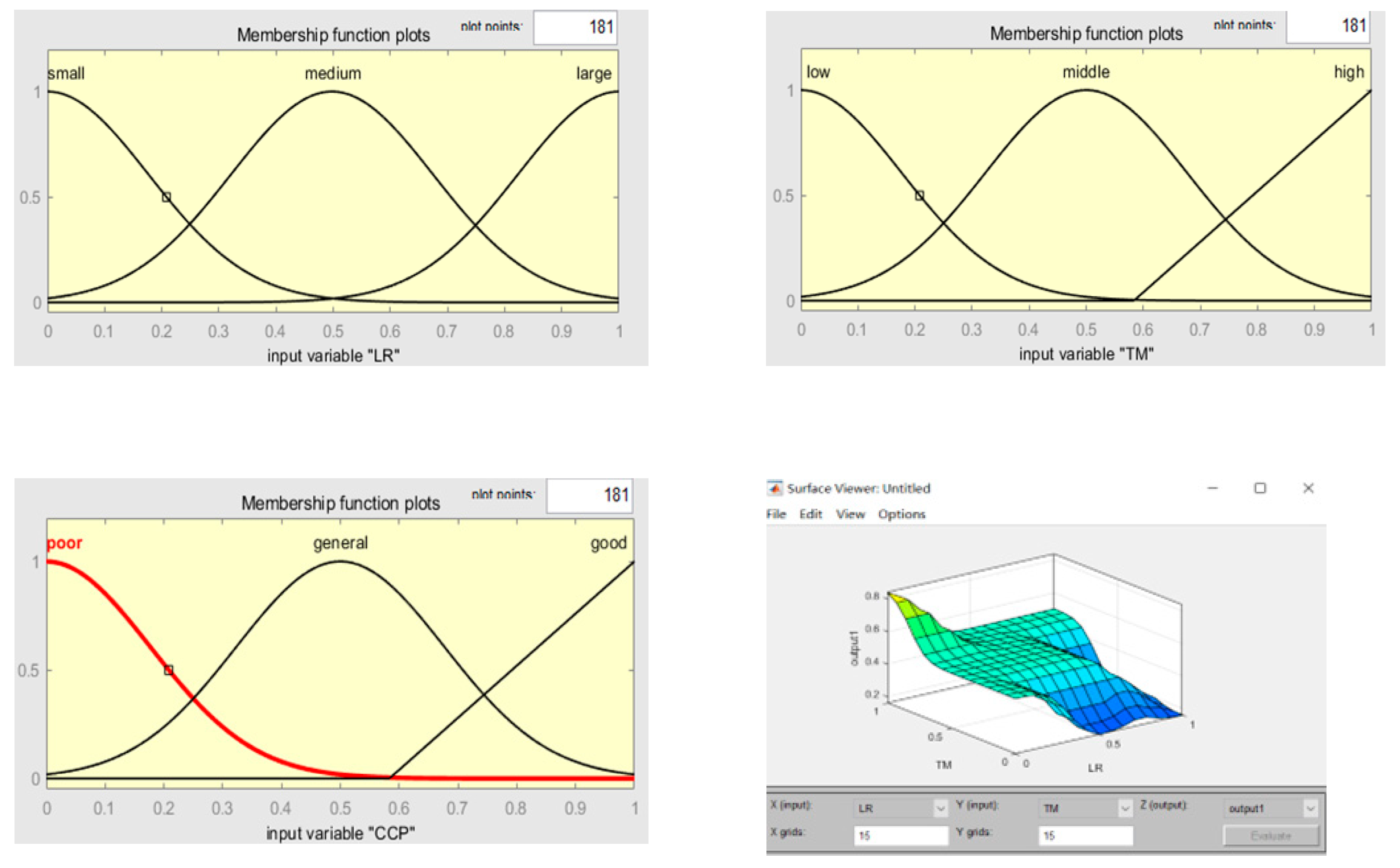
4.1.1. Fuzzy Variables
4.1.2. Fuzzy Rules
4.1.3. Solution of Fuzzy
| Algorithm 1: Service Node Selection Algorithm Based on Fuzzy Logic (SNFLC) |
| 1: Enter vehicle information and RSU information 2: Output: vehicle optimal service node vector 3: Initialize = 0, and the number of vehicles 4: Each cycle 5: 6: The service node releases information to all vehicles, and the vehicles broadcast requests to the system 7: for 8: The vehicle evaluates the performance of each service node according to the system information (LR, TM, CCP). 9: Use fuzzy inference system to output the evaluation result vector 10: Select the maximum value of the element in the vector 11: End 12: Output the best service node vector |
4.2. Uninstallation Ratio and Resource Allocation
| Algorithm 2: A Low-Complexity Alternate Iteration Resource Allocation Algorithm (LC-IRA) |
| 1: Initialization: The service node selects the vector, , and sets the minimum error value of iteration number , as the convergence target of the algorithm. 2: Repeat 3: Update , according to Equation (26). 4: Update , according to Equation (27). 5: Update , according to Equation (28). 6: Update , according to Formula (29). 7: Update 8: Update 9: Update . 10: To compare the 11: 12: Until the algorithm converges 13. Solve problem P2.2 by using the linear equation solution method to obtain the optimal unloading proportion 14: Output |
5. Simulation Experiment
5.1. Simulation Experiment Environment
- (1)
- Service node selection
- (2)
- Resource allocation strategy algorithm
5.2. Analysis of Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lin, H.; Zeadally, S.; Chen, Z.H.; Labiod, H.; Wang, L.S. A survey on computation offloading modeling for edge computing. J. Netw. Comput. Appl. 2020, 169, 102781. [Google Scholar] [CrossRef]
- Feng, C.; Han, P.C.; Zhang, X.; Yang, B.W.; Liu, Y.J.; Guo, L. Computation offloading in mobile edge computing networks: A survey. J. Netw. Comput. Appl. 2022, 202, 103366. [Google Scholar] [CrossRef]
- Islam, A.; Debnath, A.; Ghose, M.; Chakraborty, S. A survey on task offloading in multi-access edge computing. J. Syst. Archit. 2021, 118, 102225. [Google Scholar] [CrossRef]
- Hejja, K.; Berri, S.; Labiod, H. Network slicing with load-balancing for task offloading in vehicular edge computing. Veh. Commun. 2022, 34, 100419. [Google Scholar] [CrossRef]
- Liu, B.W.; Xu, X.L.; Qi, L.Y.; Ni, Q.; Dou, W.C. Task scheduling with precedence and placement constraints for resource utilization improvement in multi-user MEC environment. J. Syst. Archit. 2021, 114, 101970. [Google Scholar] [CrossRef]
- Wan, Z.L.; Xu, D.; Xu, D.H.; Ahmad, I. Joint computation offloading and resource allocation for NOMA-based multi-access mobile edge computing systems. Comput. Netw. 2021, 196, 108256. [Google Scholar] [CrossRef]
- Xiao, Z.; Shu, J.M.; Jiang, H.B.; Min, G.Y.; Chen, H.Y.; Han, Z. Perception task offloading with collaborative computation for autonomous driving. IEEE J. Sel. Areas Commun. 2023, 41, 457–473. [Google Scholar] [CrossRef]
- Jiang, H.; Dai, X.; Xiao, Z.; Iyengar, A.K. Joint Task Offloading and Resource Allocation for Energy-Constrained Mobile Edge Computing. IEEE Trans. Mob. Comput. 2022. [Google Scholar] [CrossRef]
- Li, Q.; Lin, H.; Tan, X.; Du, S. H∞ Consensus for Multiagent-Based Supply Chain Systems Under Switching Topology and Uncertain Demands. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 4905–4918. [Google Scholar] [CrossRef]
- Lv, Z.; Qiao, L.; Li, J.; Song, H. Deep-learning-enabled security issues in the internet of things. IEEE Internet Things J. 2020, 8, 9531–9538. [Google Scholar] [CrossRef]
- Chen, Y. Research on collaborative innovation of key common technologies in new energy vehicle industry based on digital twin technology. Energy Rep. 2022, 8, 15399–15407. [Google Scholar] [CrossRef]
- Liao, Y.Z.; Shou, L.Q.; Yu, Q.; Ai, Q.S.; Liu, Q. Joint offloading decision and resource allocation for mobile edge computing enabled networks. Comput. Commun. 2020, 154, 361–369. [Google Scholar] [CrossRef]
- Xue, J.B.; Hu, Q.C.; An, Y.N.; Wang, L. Joint task offloading and resource allocation in vehicle-assisted multi-access edge computing. Comput. Commun. 2021, 177, 77–85. [Google Scholar] [CrossRef]
- Ju, X.; Su, S.C.; Xu, C.J.; Wang, H.X. Computation offloading and tasks scheduling for the internet of vehicles in edge computing: A deep reinforcement learning-based pointer network approach. Comput. Netw. 2023, 223, 109572. [Google Scholar] [CrossRef]
- Li, X.W.; Zhao, L.; Yu, K.P.; Aloqaily, M.; Jararweh, Y. A cooperative resource allocation model for IoT applications in mobile edge computing. Comput. Commun. 2021, 173, 183–191. [Google Scholar] [CrossRef]
- Zhao, J.; Xu, X.; Zhu, W.P. Adaptive delay-constrained resource allocation in mobile edge computing for Internet of Things communications networks. Comput. Commun. 2020, 160, 607–613. [Google Scholar] [CrossRef]
- Feng, H.; Guo, S.T.; Zhu, A.Q.; Wang, Q.Y.; Liu, D.F. Energy-efficient user selection and resource allocation in mobile edge computing. Ad. Hoc. Netw. 2020, 107, 102202. [Google Scholar] [CrossRef]
- Sadatdiynov, K.; Cui, L.Z.; Zhang, L.; Huang, J.Z.; Salloum, S.; Mahmud, M.S. A review of optimization methods for computation offloading in edge computing networks. Digit. Commun. Netw. 2022. [Google Scholar] [CrossRef]
- Lin, J.; Huang, L.; Zhang, H.L.; Yang, X.Y.; Zhao, P. A novel lyapunov based dynamic resource allocation for UAVs-assisted edge computing. Comput. Netw. 2022, 205, 108710. [Google Scholar] [CrossRef]
- Wang, K.; Wang, X.F.; Liu, X. A high reliable computing offloading strategy using deep reinforcement learning for iovs in edge computing. J. Grid Comput. 2021, 19, 15. [Google Scholar] [CrossRef]
- Saeed, J.; Mohammad, S.; Reza, M.; Amin, N.; Persico, V.; Pescapè, A. FUPE: A security driven task scheduling approach for SDN-based IoT–Fog networks. J. Inf. Secur. Appl. 2021, 60, 102853. [Google Scholar]
- Hamzah, A.; Shurman, M.; Al-Jarrah, O.; Taqieddin, E. Energy-efficient fuzzy-logic-based clustering technique for hierarchical routing protocols in wireless sensor networks. Sensors 2019, 19, 561. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Esmaeili, H.; Hakami, V.; Bidgoli, B.M.; Shokouhifar, M. Application-specific clustering in wireless sensor networks using combined fuzzy firefly algorithm and random forest. Expert Syst. Appl. 2022, 210, 118365. [Google Scholar] [CrossRef]
- Li, B.; Liu, W.S.; Fei, J.S. Offloading strategy of edge Computing tasks for empty space network. J. Electron. Inf. Technol. 2022, 44, 3091–3098. [Google Scholar]
- Xu, F.; Qin, Z.S.; Ning, L.P.; Zhang, Z.Y. Research on computing offloading strategy based on genetic ant colony fusion algorithm. Simul. Model. Pract. Theory 2022, 118, 102523. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RULE | IF | THEN | ||
|---|---|---|---|---|
| 1 | small | low | none | |
| 2 | small | middle | none | |
| … | … | … | … | … |
| large | high | good | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, H.; You, J.; Wang, Y.; Zhao, X. Offloading Strategy of Multi-Service and Multi-User Edge Computing in Internet of Vehicles. Appl. Sci. 2023, 13, 6079. https://doi.org/10.3390/app13106079
Zhao H, You J, Wang Y, Zhao X. Offloading Strategy of Multi-Service and Multi-User Edge Computing in Internet of Vehicles. Applied Sciences. 2023; 13(10):6079. https://doi.org/10.3390/app13106079
Chicago/Turabian StyleZhao, Hongwei, Jingyue You, Yangyang Wang, and Xike Zhao. 2023. "Offloading Strategy of Multi-Service and Multi-User Edge Computing in Internet of Vehicles" Applied Sciences 13, no. 10: 6079. https://doi.org/10.3390/app13106079
APA StyleZhao, H., You, J., Wang, Y., & Zhao, X. (2023). Offloading Strategy of Multi-Service and Multi-User Edge Computing in Internet of Vehicles. Applied Sciences, 13(10), 6079. https://doi.org/10.3390/app13106079