
Adaptive Finite-Time Trajectory Tracking Control for Coaxial HAUVs Facing Uncertainties and Unknown Environmental Disturbances
 , ,
, ,
Abstract
:1. Introduction
2. Dynamic Modeling of Trans-Medium Process
2.1. Preliminary
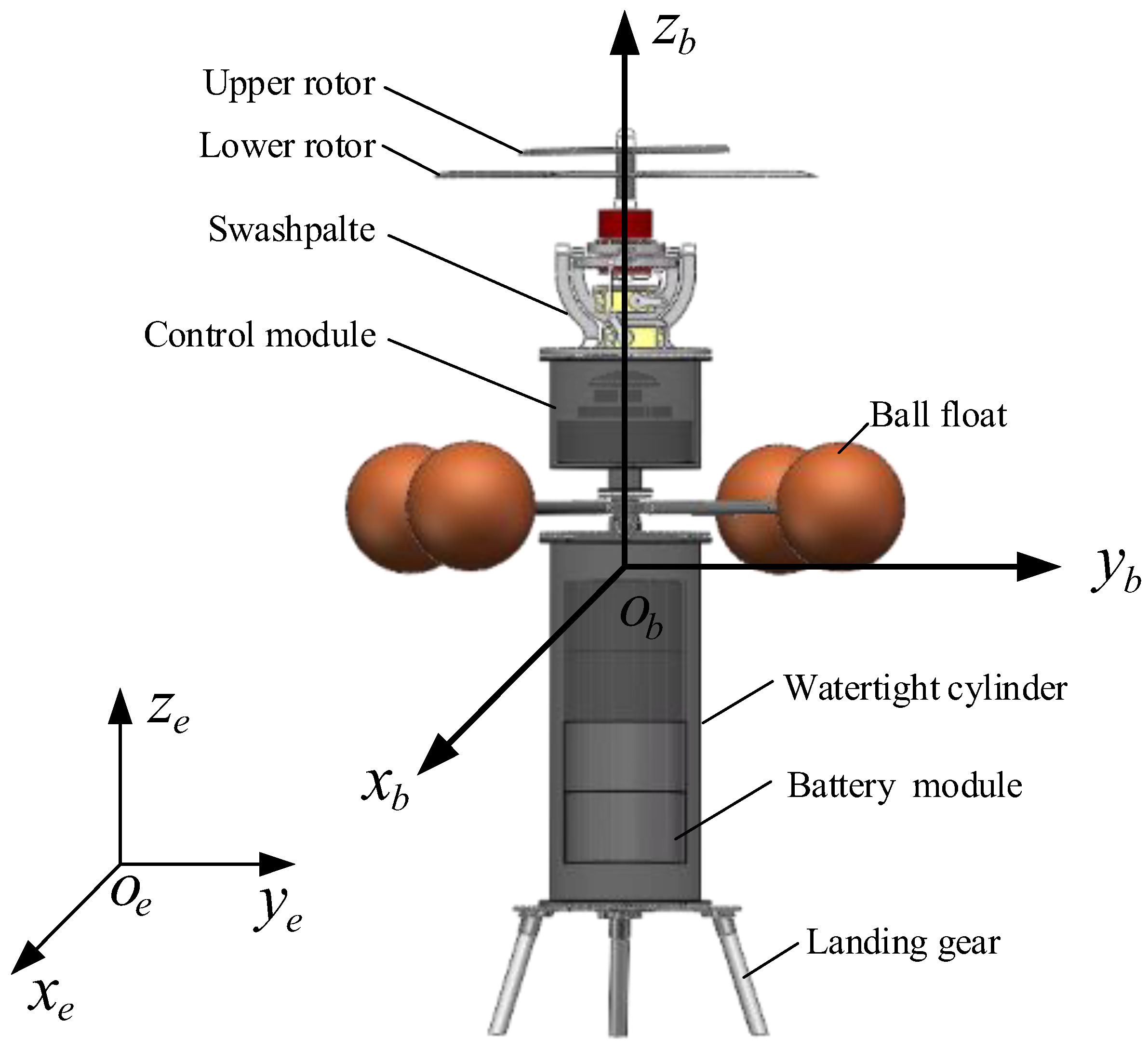
2.2. Reference Frame
2.3. Dynamic Modeling
2.3.1. Added Mass
2.3.2. Drag Force and Moment
2.3.3. Restoring Force and Moment
2.3.4. Control Force and Moment
2.3.5. Wind, Wave, and Current Complex Interference Analysis
2.4. The HAUV Dynamic Model
3. Finite-Time ANFTSMC Design
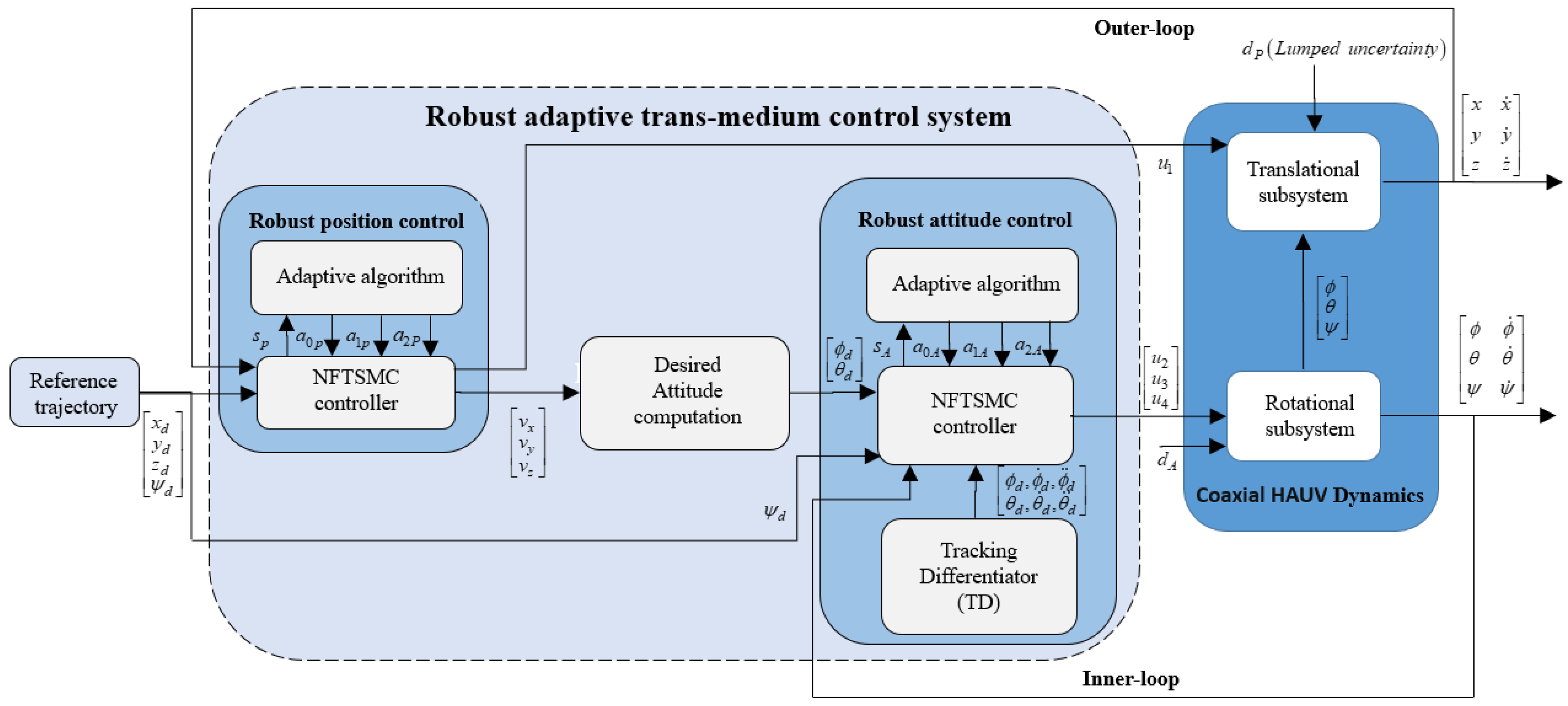
3.1. Controller Design Methodology for HAUV
3.2. Controller Design Procedure
3.2.1. NFTSMC Design
3.2.2. Adaptive Algorithm Design
3.3. Proof of Stability
4. Simulation and Discussion
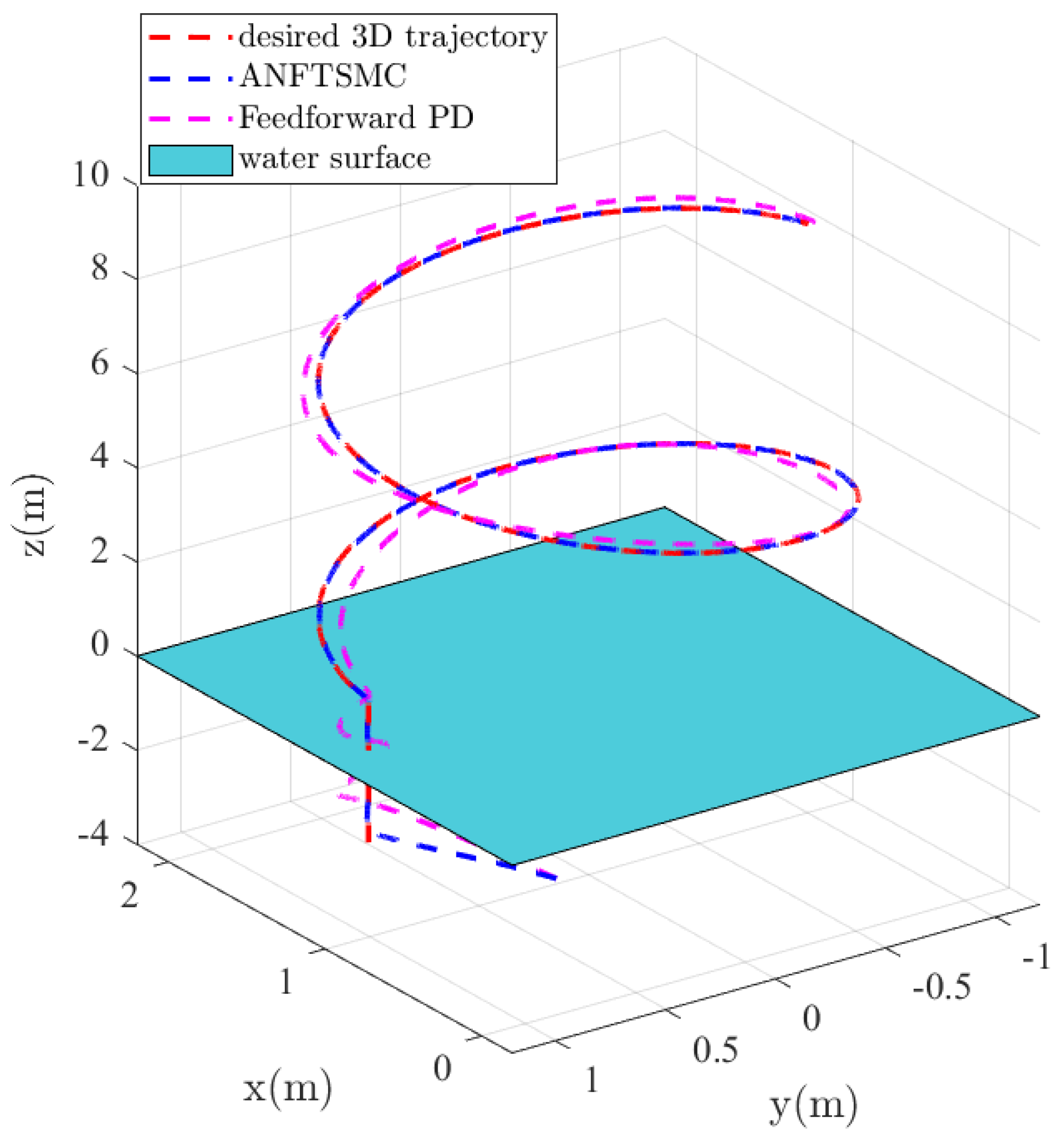
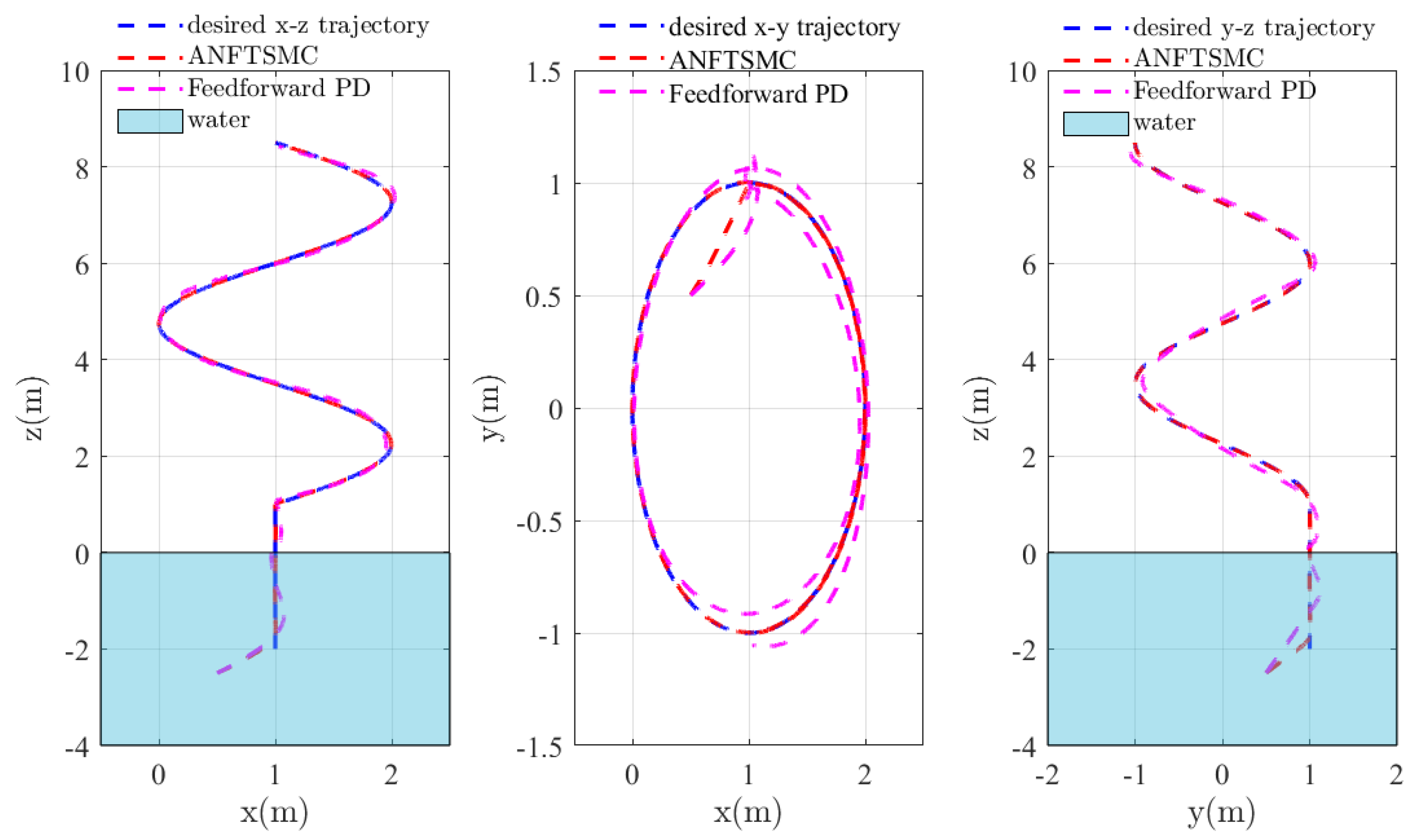
4.1. Simulation of the Vehicle Crossing the Water Surface for Takeoff
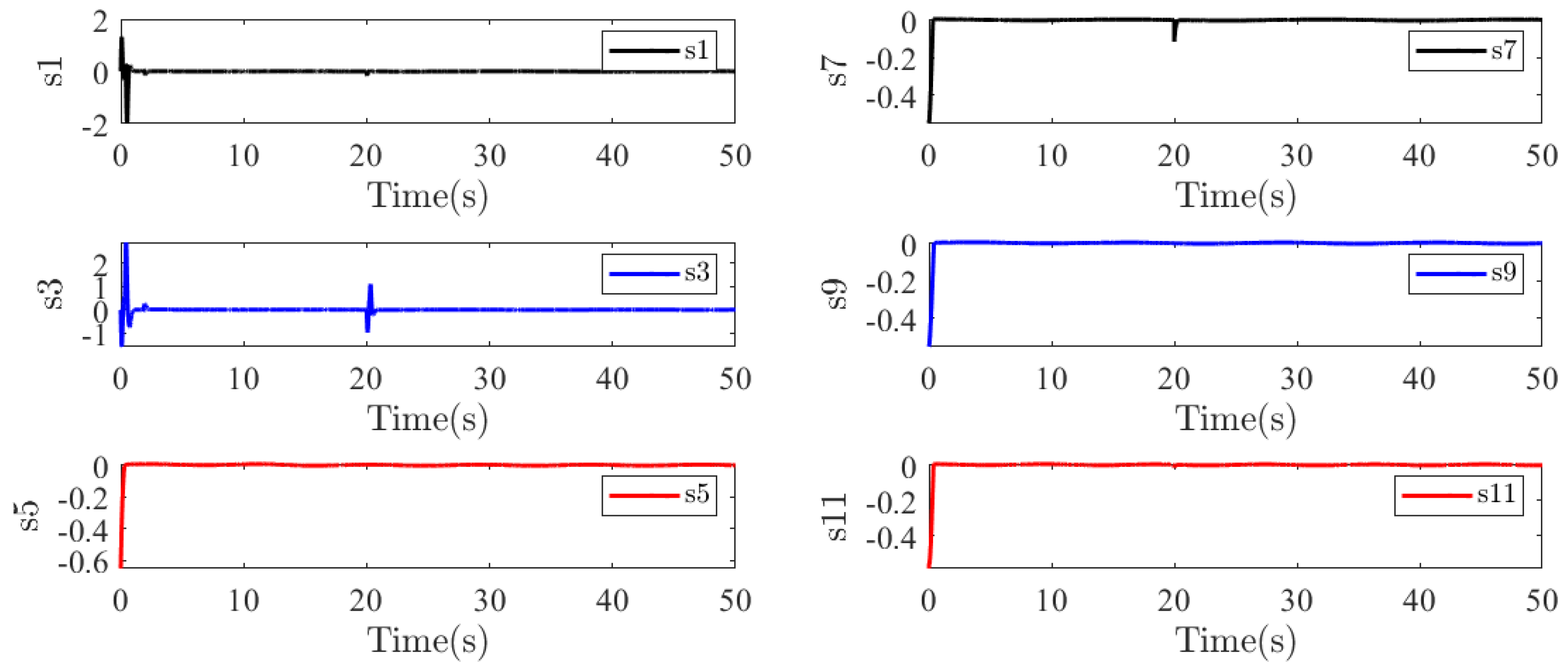
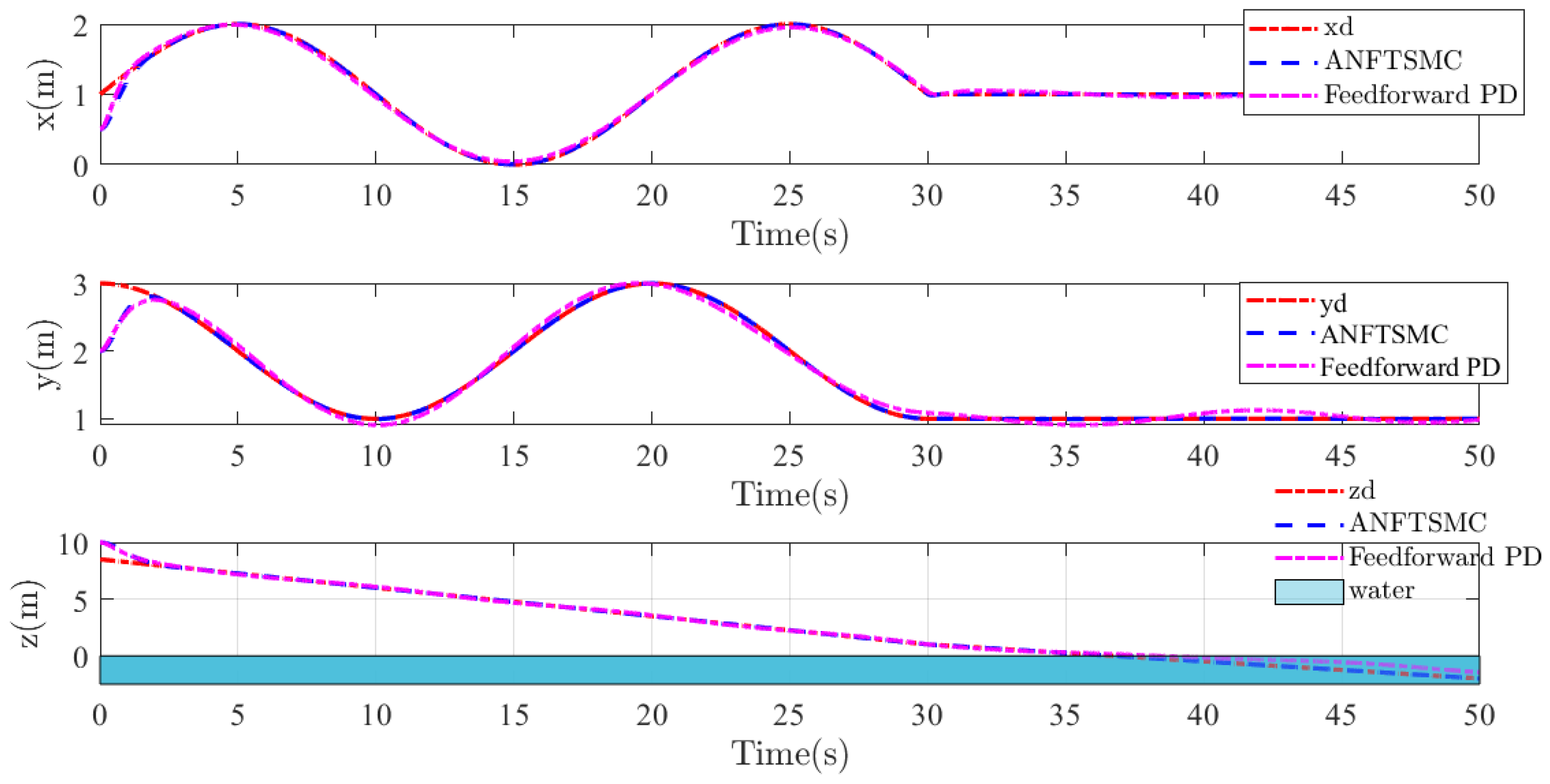
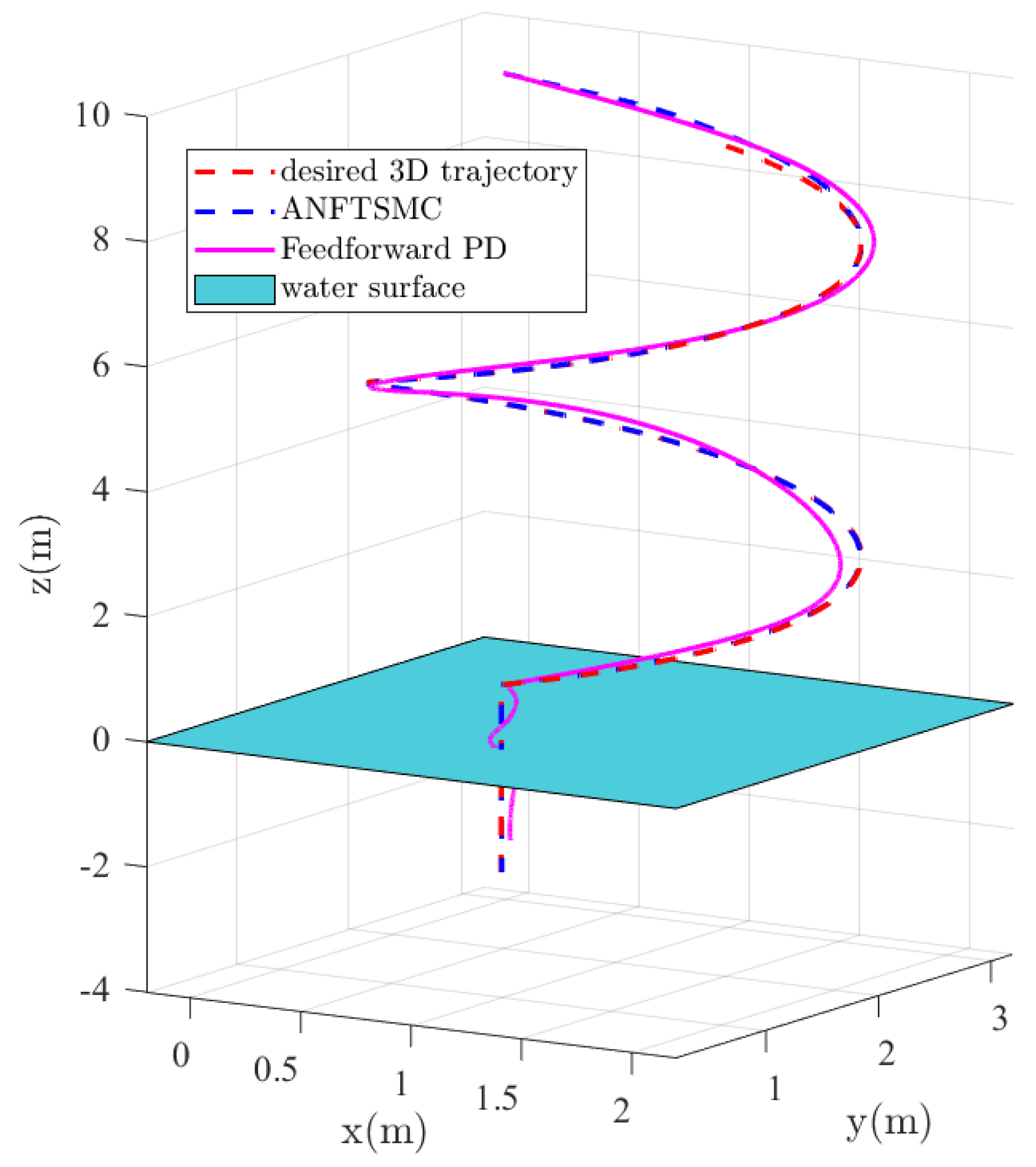
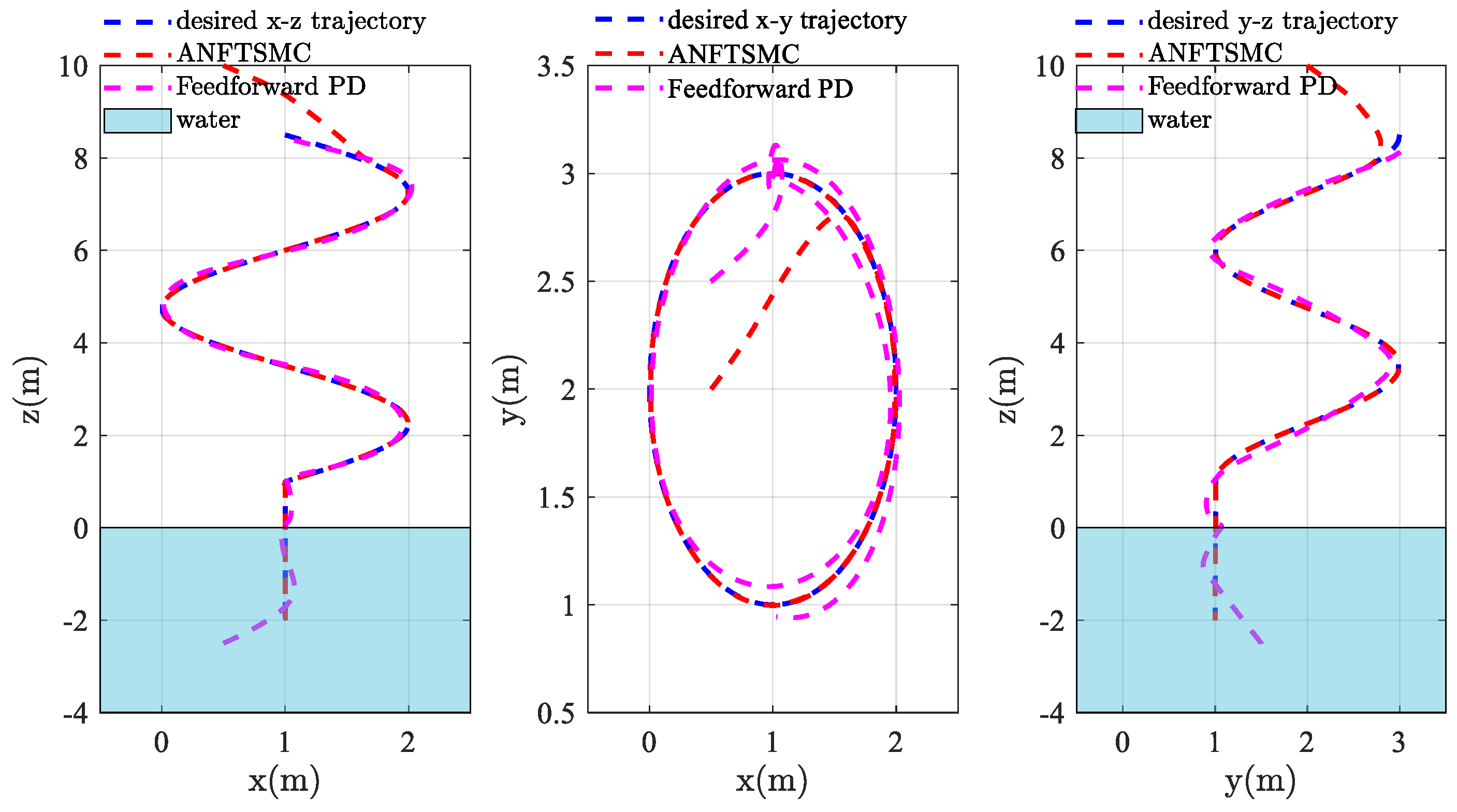
4.2. Simulation of the Vehicle Crossing the Water Surface during Diving
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, M.; Yang, S.; Li, H.; Xu, J.; Li, X. Energy Consumption Analysis and Optimization of the Deep-Sea Self-Sustaining Profile Buoy. Energies 2019, 12, 2316. [Google Scholar] [CrossRef] [Green Version]
- Wu, H.; Niu, W.; Wang, S.; Yan, S. A feedback control strategy for improving the motion accuracy of underwater gliders in currents: Performance analysis and parameter optimization. Ocean. Eng. 2022, 252, 111250. [Google Scholar] [CrossRef]
- Zhang, L.; Zheng, Y.; Huang, B.; Su, Y. Finite-time trajectory tracking control for under-actuated unmanned surface vessels with saturation constraint. Ocean. Eng. 2022, 249, 110745. [Google Scholar] [CrossRef]
- Zhu, C.; Jun, L.; Huang, B.; Su, Y.; Zheng, Y. Trajectory tracking control for autonomous underwater vehicle based on rotation matrix attitude representation. Ocean. Eng. 2022, 252, 111206. [Google Scholar] [CrossRef]
- Jacobs, T.; Jacobi, M.; Rogers, M.; Adams, J.; Coffey, J.J.; Walker, J.; Johnston, B. Testing and Evaluating Low Altitude Unmanned Aircraft System Technology for Maritime Domain Awareness and Oil Spill Response in the Arctic. Mar. Technol. Soc. J. 2015, 49, 145–150. [Google Scholar] [CrossRef] [Green Version]
- Girdhar, Y.; Xu, A.; Shkurti, F.; Higuera, J.C.G.; Meghjani, M.; Giguere, P.; Rekleitis, I.; Dudek, G. Monitoring Marine Environments using a Team of Heterogeneous Robots. In Proceedings of the RSS 2012 Workshop on Robotics for Environmental Monitoring (WREM 2012), Vilamoura, Portugal, 7–12 October 2013. [Google Scholar]
- Zeng, Z.; Lyu, C.; Bi, Y.; Jin, Y.; Lu, D.; Lian, L. Review of hybrid aerial underwater vehicle: Cross-domain mobility and transitions control. Ocean. Eng. 2022, 248, 110840. [Google Scholar] [CrossRef]
- Petrov, G. Flying Submarine. J. Fleet 1995, 3, 52–53. Available online: http://www.airforce.ru/aircraft/miscellaneous/flying_submarine/index.htm (accessed on 24 June 2023).
- Yao, G.; Li, Y.; Zhang, H.; Jiang, Y.; Wang, T.; Sun, F.; Yang, X. Review of hybrid aquatic-aerial vehicle (HAAV): Classifications, current status, applications, challenges and technology perspectives. Prog. Aerosp. Sci. 2023, 139, 100902. [Google Scholar] [CrossRef]
- Drews, J.P.; Neto, A.A.; Campos, M. Hybrid Unmanned Aerial Underwater Vehicle: Modeling and Simulation. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Chicago, IL, USA, 14–18 September 2014. [Google Scholar]
- Maia, M.M.; Mercado, D.A.; Diez, F.J. Design and implementation of multirotor aerial-underwater vehicles with experimental results. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Mercado, D.A.; Maia, M.M.; Diez, F.J. Aerial-underwater systems, a new paradigm in unmanned vehicles. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017. [Google Scholar]
- Alzu’bi, H.; Mansour, I.; Rawashdeh, O. Loon copter: Implementation of a hybrid unmanned aquatic–aerial quadcopter with active buoyancy control. J. Field Robot. 2018, 35, 764–778. [Google Scholar] [CrossRef]
- Qi, D.; Feng, J.; Li, Y. Dynamic model and ADRC of a novel water-air unmanned vehicle for water entry with in-ground effect. J. Vibroengineering 2016, 18, 3743–3756. [Google Scholar] [CrossRef] [Green Version]
- Ma, Z.; Feng, J.; Jian, Y. Research on vertical air–water trans-media control of Hybrid Unmanned Aerial Underwater Vehicles based on adaptive sliding mode dynamical surface control. Int. J. Adv. Robot. Syst. 2018, 15, 172988141877053. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Liu, Y.; Meng, Y.; Yu, S.; Zhuang, Y. System Modeling and Simulation of an Unmanned Aerial Underwater Vehicle. J. Mar. Sci. Eng. 2019, 7, 444. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Zeng, Z.; Yu, C.; Jiang, Z.; Han, B.; Lian, L. Predictive and sliding mode cascade control for cross-domain locomotion of a coaxial aerial underwater vehicle with disturbances. Appl. Ocean. Res. 2020, 100, 102183. [Google Scholar] [CrossRef]
- Chen, Q.; Zhu, D.; Liu, Z. Attitude control of aerial and underwater vehicles using single-input FUZZY P+ID controller. Applied Ocean. Res. 2020, 107, 102460. [Google Scholar] [CrossRef]
- Lu, D.; Xiong, C.; Zeng, Z.; Lian, L. Adaptive Dynamic Surface Control for a Hybrid Aerial Underwater Vehicle With Parametric Dynamics and Uncertainties. IEEE J. Ocean. Eng. 2019, 45, 740–758. [Google Scholar] [CrossRef]
- Lu, D.; Guo, Y.; Xiong, C.; Zeng, Z.; Lian, L. Takeoff and Landing Control of a Hybrid Aerial Underwater Vehicle on Disturbed Water’s Surface. IEEE J. Ocean. Eng. 2022, 47, 295–311. [Google Scholar] [CrossRef]
- Bi, Y.; Lu, D.; Zeng, Z.; Lian, L. Dynamics and control of hybrid aerial underwater vehicle subject to disturbances. Ocean. Eng. 2022, 250, 110933. [Google Scholar] [CrossRef]
- Tan, L.; Liang, S.; Su, H.; Qin, Z.; Li, L.; Huo, J. Research on Amphibious Multi-Rotor UAV Out-of-Water Control Based on ADRC. Appl. Sci. 2023, 13, 4900. [Google Scholar] [CrossRef]
- Wei, T.; Hu, R.; Li, J.; Bi, Y.; Jin, Y.; Lu, D.; Zeng, Z.; Lian, L. Experimental study on trans-media hydrodynamics of a cylindrical hybrid unmanned aerial underwater vehicle. Ocean. Eng. 2022, 252, 111190. [Google Scholar] [CrossRef]
- Wei, T.; Lu, D.; Zeng, Z.; Lian, L. Trans-Media Kinematic Stability Analysis for Hybrid Unmanned Aerial Underwater Vehicle. J. Mar. Sci. Eng. 2022, 10, 275. [Google Scholar] [CrossRef]
- Wei, T.; Li, J.; Zeng, Z.; Lian, L. Trans-media resistance investigation of hybrid aerial underwater vehicle base on hydrodynamic experiments and machine learning. Ocean. Eng. 2022, 266, 112808. [Google Scholar] [CrossRef]
- Gao, Y.; Zhang, H.; Yang, H.; Tan, S.; Gulliver, T.A.; Lu, T. Trans-Domain Amphibious Unmanned Platform Based on Coaxial Counter-Propellers: Design and Experimental Validation. IEEE Access 2021, 9, 149433–149446. [Google Scholar] [CrossRef]
- Ravell, D.M.; Maia, M.M.; Diez, F.J. Modeling and control of unmanned aerial/underwater vehicles using hybrid control. Control Eng. Pract. 2018, 76, 112–122. [Google Scholar] [CrossRef]
- Xu, J.; Hao, Y.; Wang, J.; Li, L. The Control Algorithm and Experimentation of Coaxial Rotor Aircraft Trajectory Tracking Based on Backstepping Sliding Mode. Aerospace 2021, 8, 337. [Google Scholar] [CrossRef]
- Glida, H.E.; Chelihi, A.; Abdou, L.; Sentouh, C.; Perozzi, G. Trajectory tracking control of a coaxial rotor drone: Time-delay estimation-based optimal model-free fuzzy logic approach. ISA Trans. 2022, 137, 236–247. [Google Scholar] [CrossRef]
- Mokhtari, M.R.; Braham, A.C.; Cherki, B. Extended state observer based control for coaxial-rotor UAV. ISA Trans. 2016, 61, 1–14. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Novel robust super twisting integral sliding mode controller for a quadrotor under external disturbances. Int. J. Dyn. Control 2020, 8, 805–815. [Google Scholar] [CrossRef]
- Boukattaya, M.; Mezghani, N.; Damak, T. Adaptive nonsingular fast terminal sliding-mode control for the tracking problem of uncertain dynamical systems. Isa Trans. 2018, 77, 1–19. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Robust adaptive nonsingular fast terminal sliding-mode tracking control for an uncertain quadrotor UAV subjected to disturbances—ScienceDirect. ISA Trans. 2020, 99, 290–304. [Google Scholar] [CrossRef]
- Huang, S.; Yang, Y. Adaptive neural-network-based nonsingular fast terminal sliding mode control for a quadrotor with dynamic uncertainty. Drones 2022, 6, 206. [Google Scholar] [CrossRef]
- Asl, S.B.F.; Moosapour, S.S. Adaptive backstepping fast terminal sliding mode controller design for ducted fan engine of thrust-vectored aircraft. Aerosp. Sci. Technol. 2017, 71, 521–529. [Google Scholar]
- Plestan, F.; Shtessel, Y.; Bregeault, V.; Poznyak, A. New methodologies for adaptive sliding mode control. Int. J. Control 2010, 83, 1907–1919. [Google Scholar] [CrossRef] [Green Version]
- Moulay, E.; Perruquetti, W. Finite time stability and stabilization of a class of continuous systems. J. Math. Anal. Appl. 2006, 323, 1430–1443. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Liu, Z.; Gao, H.; Wang, G. Robust adaptive recursive sliding mode attitude control for a quadrotor with unknown disturbances. ISA Trans. 2022, 122, 114–125. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronyms | Full Name | Acronyms | Full Name |
|---|---|---|---|
| HAUVs | Hybrid aerial-underwater vehicles | ANFTSMC | Adaptive non-singular fast terminal sliding-mode controller |
| NFTSMC | Nonsingular fast terminal sliding mode control | AV | Unmanned aerial vehicle |
| SMC | sliding mode control | ADRC | Active disturbance rejection control |
| UG | Underwater gliders | ADSC | Adaptive dynamic surface control |
| USV | Unmanned surface vehicles | NDO | Nonlinear disturbance observer |
| UUV | Unmanned underwater vehicles | TDAV | Trans-domain amphibious vehicle |
| Variable Symbol | Physical Meaning | Variable Symbol | Physical Meaning |
|---|---|---|---|
| body-fixed coordinate system | volume of watertight chamber | ||
| inertial coordinate frame | acceleration of gravity | ||
| position vector in inertial coordinate frame | center coordinate of buoyancy | ||
| attitude vector in inertial coordinate frame | buoyancy torque | ||
| linear velocities in the body-fixed frame | control force | ||
| angular velocities in the body-fixed frame | mapping transformation matrix | ||
| the HAUV’s body mass | lift coefficients of the upper and lower propellers | ||
| the moments of inertia | control torque | ||
| added mass | lumped uncertainty and upper bound | ||
| added moments of inertia | position virtual control | ||
| , | total mass and inertia | state vector | |
| , | linearization coefficient | total lift force | |
| drag coefficient matrices in underwater and air | expected roll | ||
| buoyancy | expected pitch | ||
| density of water | lift loss coefficient of the lower propellers |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 0.2 | 0.8 | ||
| 1.21 | 0.5 | ||
| 2 | 5/3 | ||
| 0.5 | 0.001 | ||
| 0.01 | 0.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, M.; Liao, F.; Xing, B.; Fan, Z.; Su, Y.; Wu, W. Adaptive Finite-Time Trajectory Tracking Control for Coaxial HAUVs Facing Uncertainties and Unknown Environmental Disturbances. Appl. Sci. 2023, 13, 8026. https://doi.org/10.3390/app13148026
Lu M, Liao F, Xing B, Fan Z, Su Y, Wu W. Adaptive Finite-Time Trajectory Tracking Control for Coaxial HAUVs Facing Uncertainties and Unknown Environmental Disturbances. Applied Sciences. 2023; 13(14):8026. https://doi.org/10.3390/app13148026
Chicago/Turabian StyleLu, Mingqing, Fei Liao, Beibei Xing, Zhaolin Fan, Yumin Su, and Wenhua Wu. 2023. "Adaptive Finite-Time Trajectory Tracking Control for Coaxial HAUVs Facing Uncertainties and Unknown Environmental Disturbances" Applied Sciences 13, no. 14: 8026. https://doi.org/10.3390/app13148026