
Modeling of Strain Actuation on Relatively Soft Curved Beams by Piezoelectric Ceramics for De-Icing Systems

 , , and
, , and
Abstract
:1. Introduction
2. Modeling of Strain Actuation on Curved Beams
2.1. Theoretical Models
- The strain transmitted to the structure is made of a constant and an exponential term, which vanishes for values of the Γ parameter higher than 10, and the adhesion is called “perfect”;
- For usual values of the physical and geometrical characteristics, the adhesion quality constant is always higher than 10.
- To simulate the presence of a piezoelectric actuator on a series of curved beams with different characteristics (in terms of the curvature radius, thickness, and so on);
- Remove the piezoelectric actuator and impose the expected force field at the boundaries of the contact region;
- Evaluate the displacement at certain characteristic points of the structure, such as the tip;
- Verify the ratio among the displacements coming from the theoretical models (flat plates) and the numerical ones (with the piezo device and with its effect only).
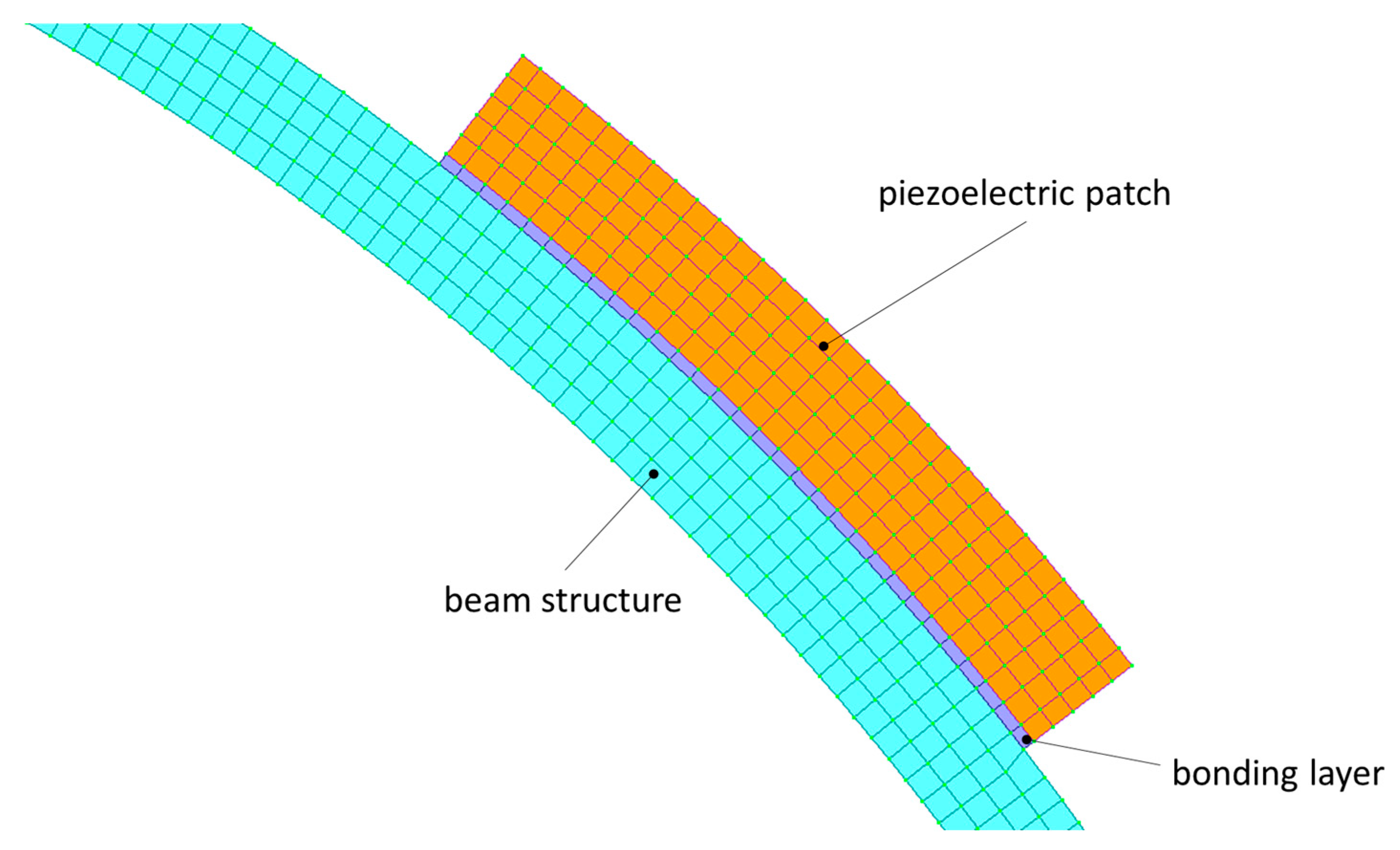
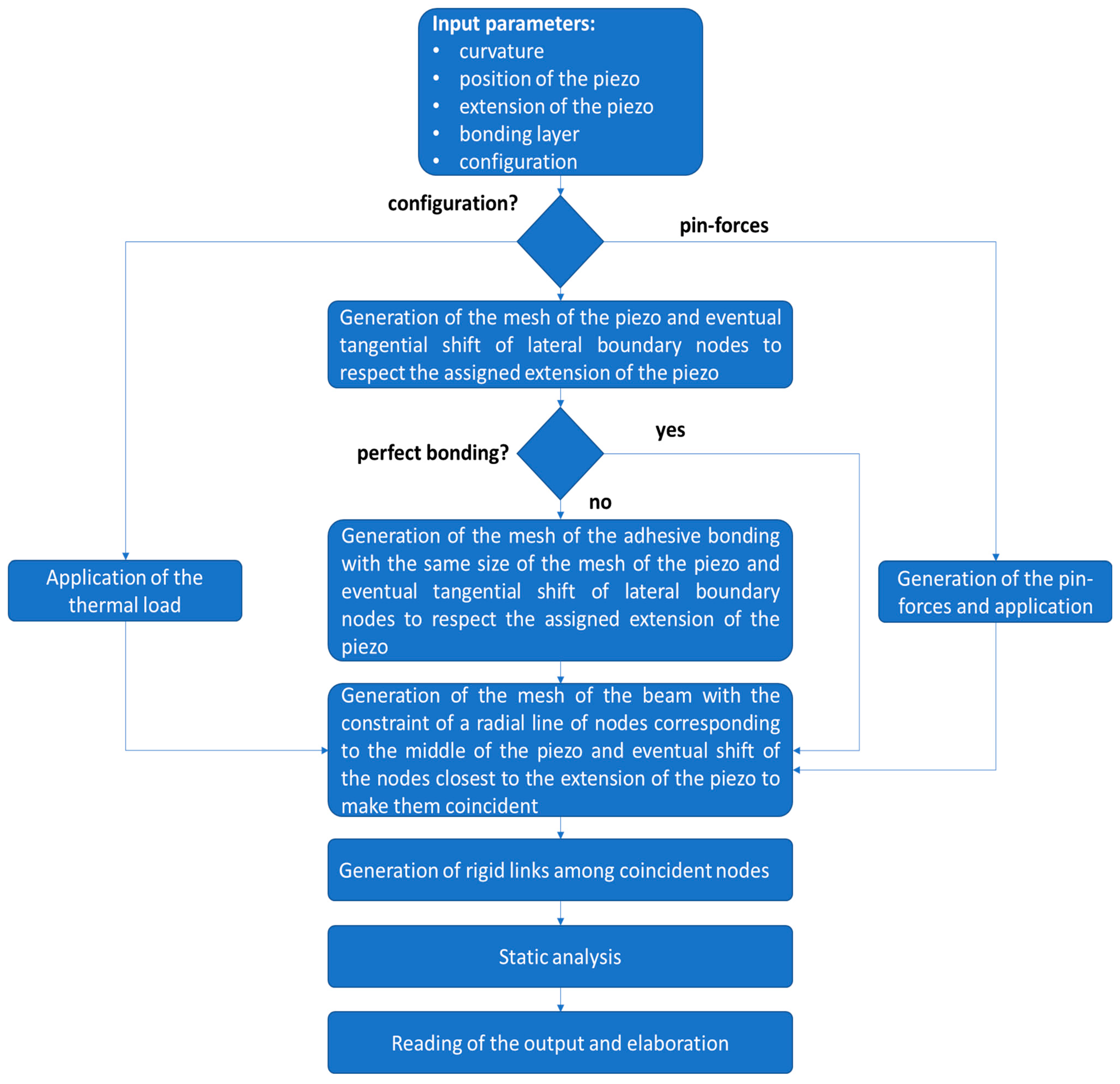
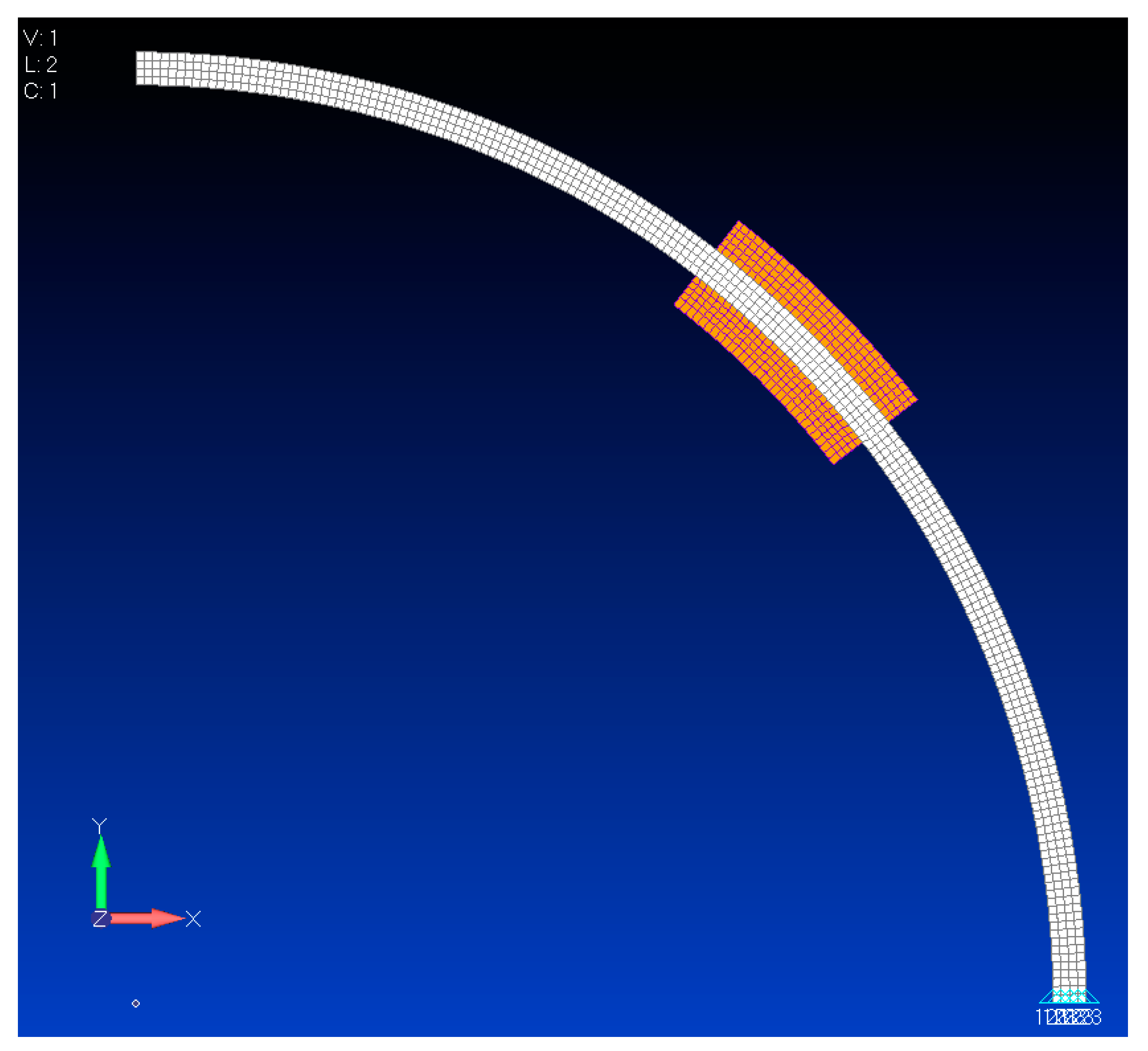
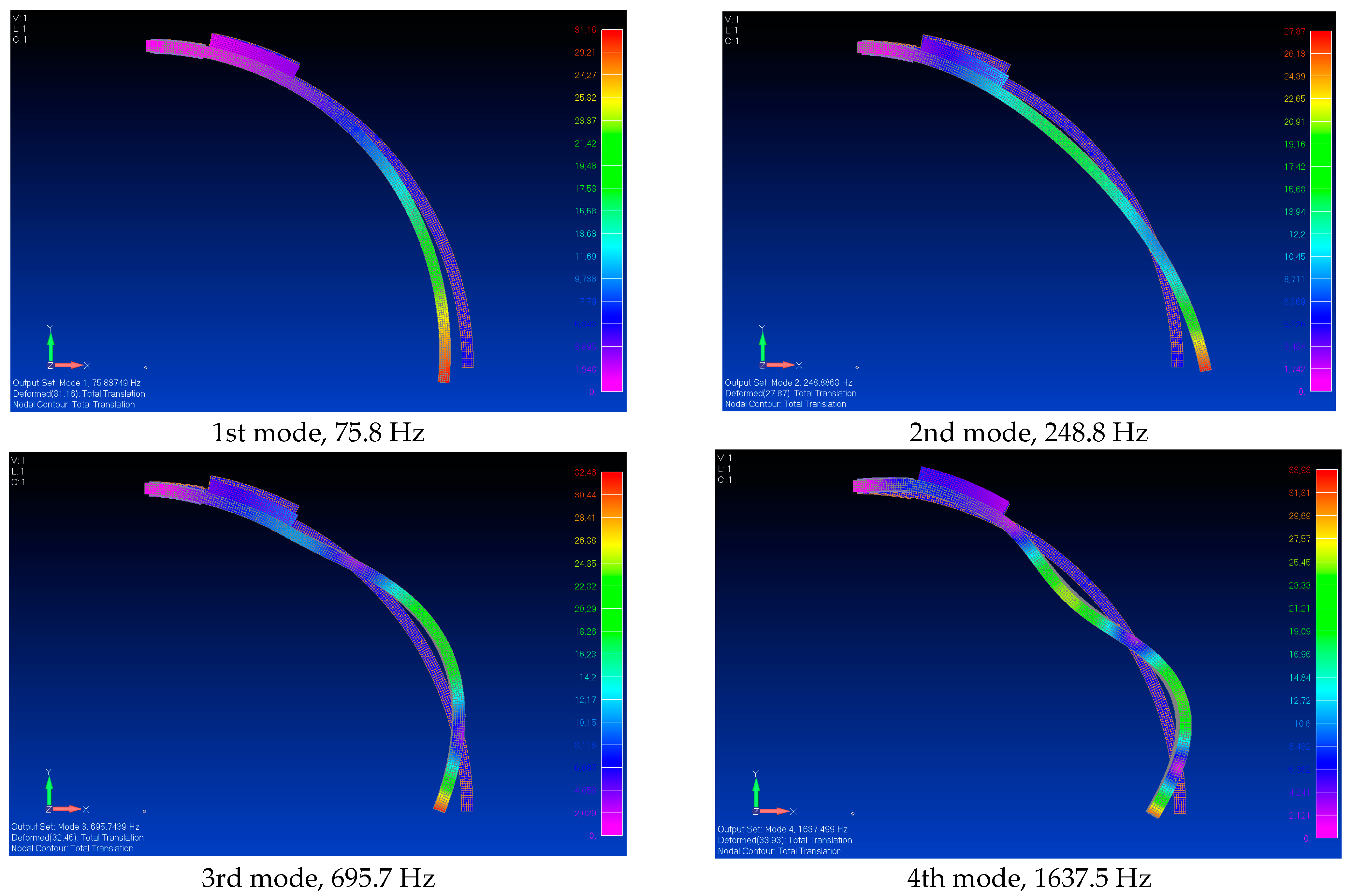
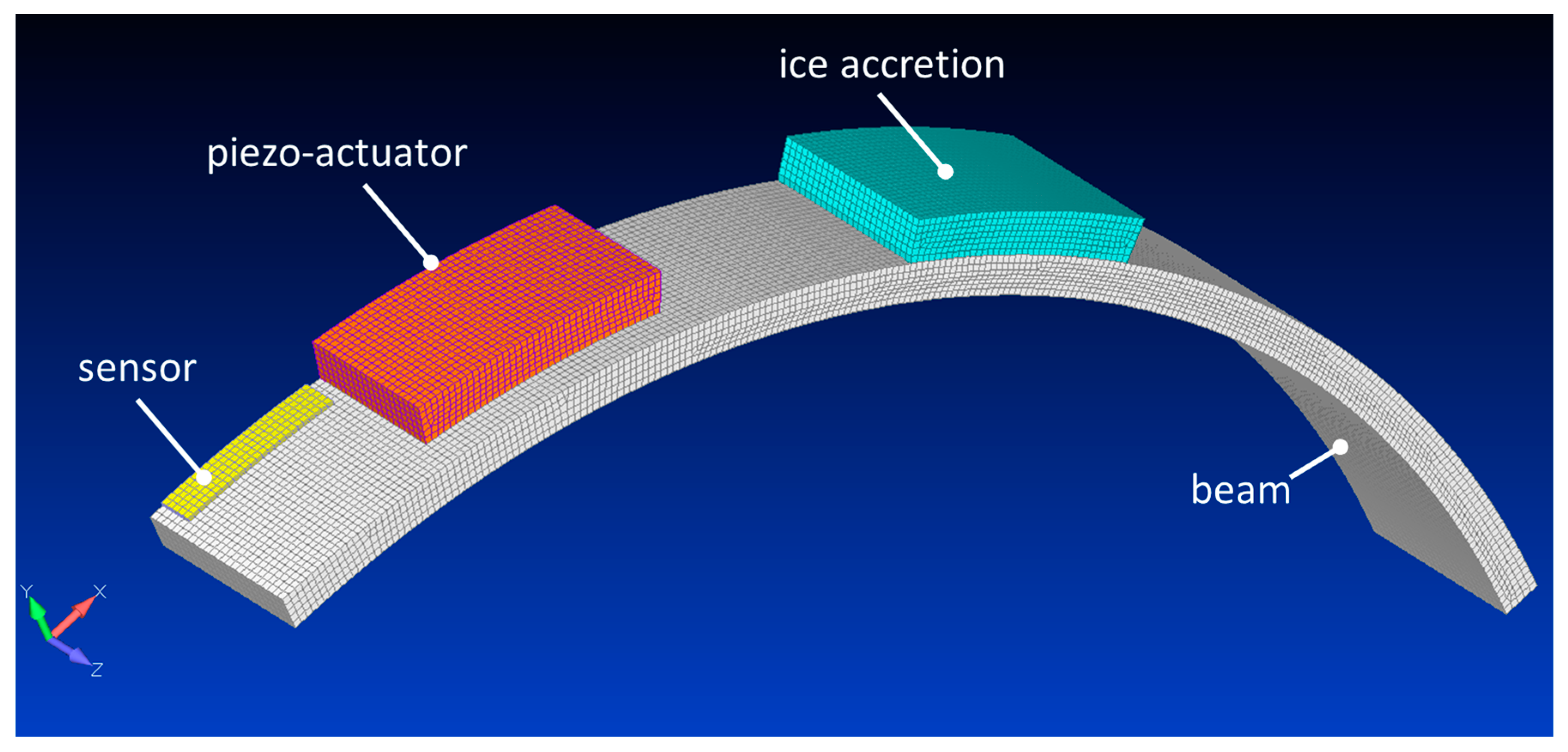
2.2. FE Modeling
- To determine a relation between the strain and displacement transmitted by an expanding piezoelectric element and by pin forces;
- To describe the strain displacement field along the radial and tangential coordinates;
- To investigate the effects of specific parameters such as the piezo device/structure thickness ratio, the angular position of the piezo device, and its tangential extension;
- To estimate the stress–strain field within the bonding layer;
- Finally, to ensure adequate computational lightness.
- The thermal load: The expansion (contraction) caused by the application of a voltage between the top and bottom faces of the piezo device was simulated by assigning to the piezo material a fictious expansion coefficient, α_PZT:
- The pin forces: Three forces were placed at the interface between the piezo device and the structure—on the first and last nodes, oriented in opposite ways along the tangential direction, and on the middle node, oriented along the radial direction. This last radial force was also considered to allow the force balance along the radial direction, which is already intrinsically satisfied by the thermal loading. The scheme in Figure 4 illustrates the relation between the two opposite tangential forces, Ft, and the radial one, Fr. In practice, the equilibrium requires that the radial force is 2 times the sine of the halved tangential extension, θ, of the piezo device.

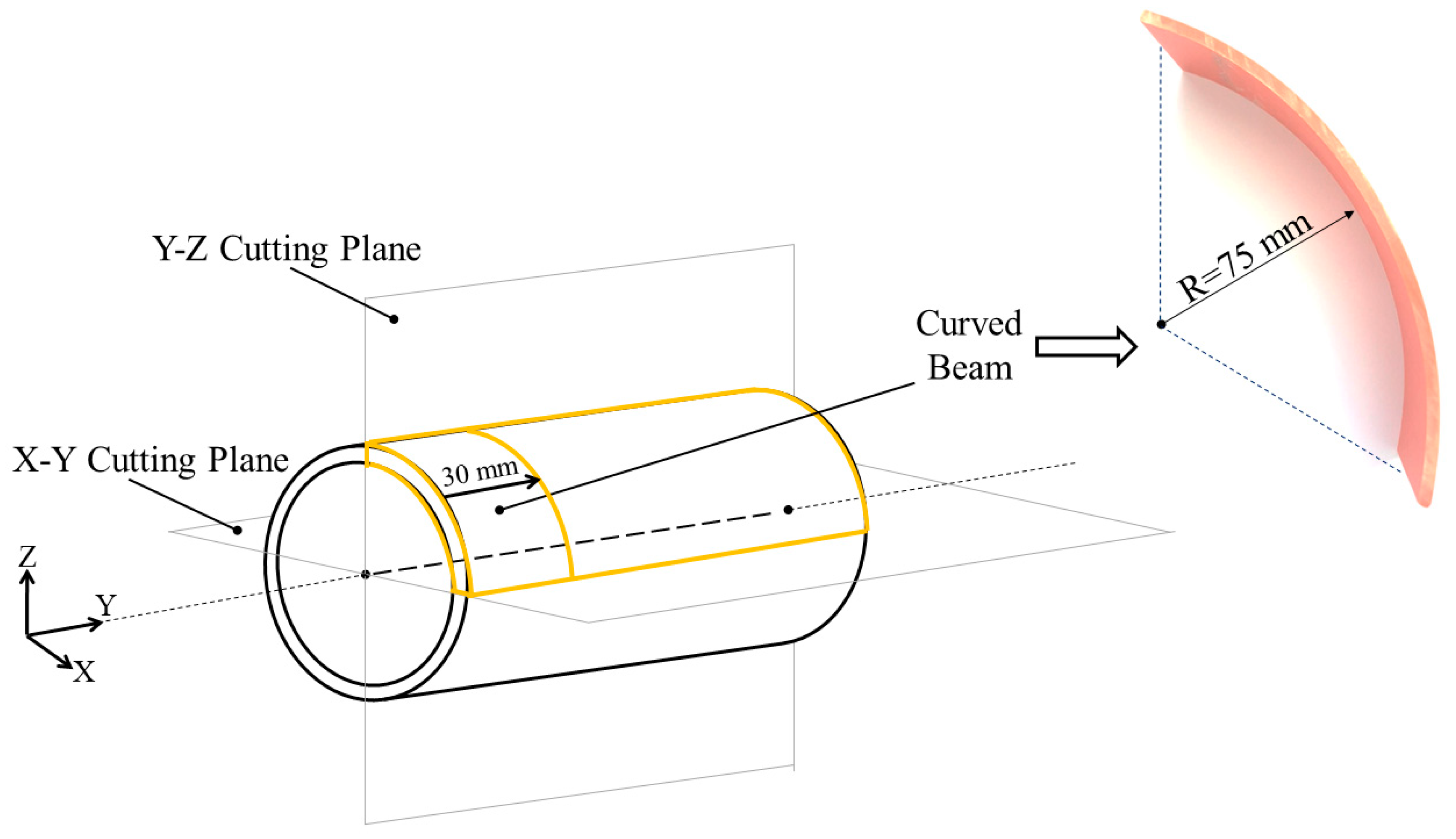
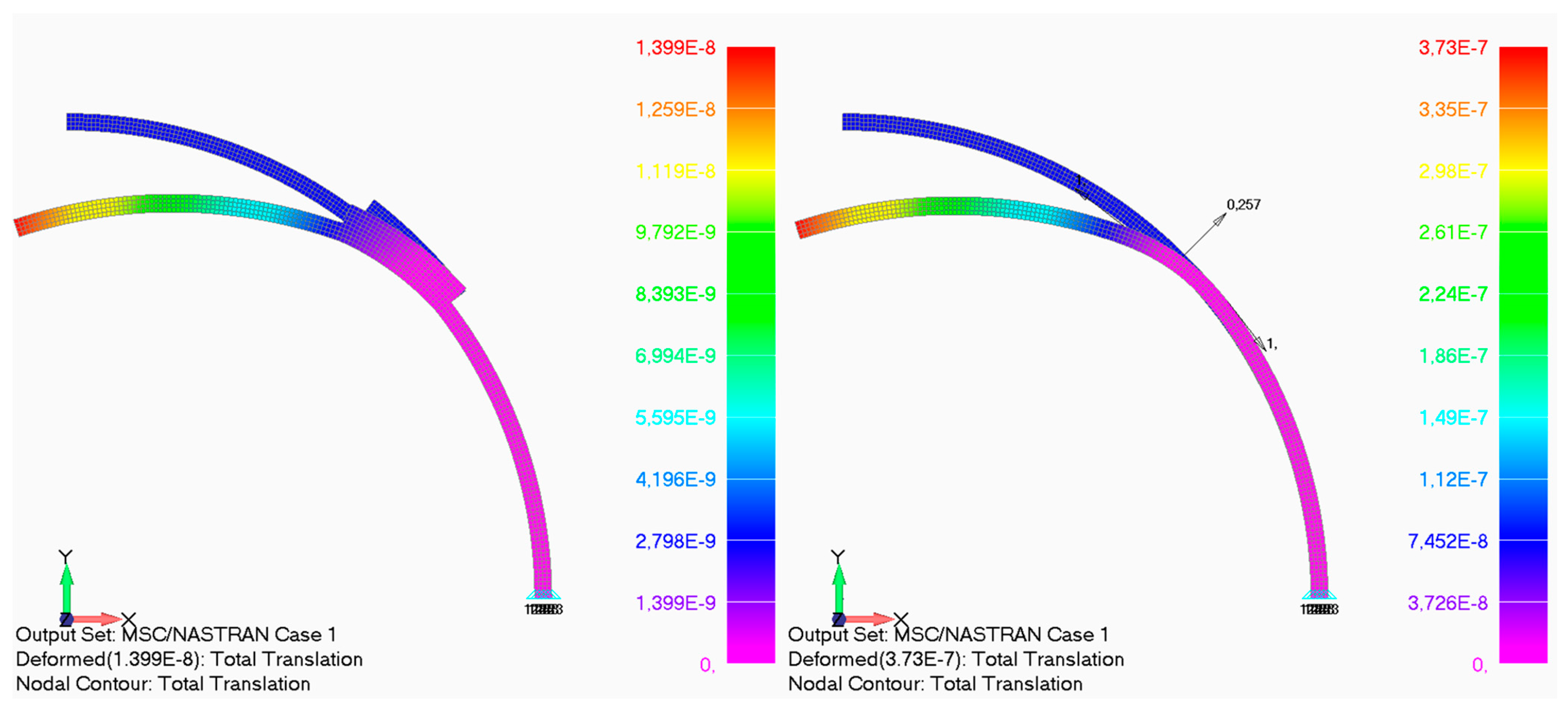
2.2.1. Effect of the Curvature
- Piezo device thickness: 3 mm;
- Beam thickness: 2.7 mm;
- Piezo device’s tangential extension: 10 mm (corresponding to a value of 14.75 deg for the internal reference radii of 0.075 m)
- Beam length (main line): 119.9 mm;
2.2.2. Effect of the Angular Position of the Piezoelectric Patch
2.2.3. Effect of the Angular Extension of the Piezo Patch
2.2.4. Effect of the Adhesive
2.2.5. Effect of the Bonding Layer Thickness
3. Results and Validation
3.1. Validation through Theoretical Transmission Models
3.2. Experimental Validation
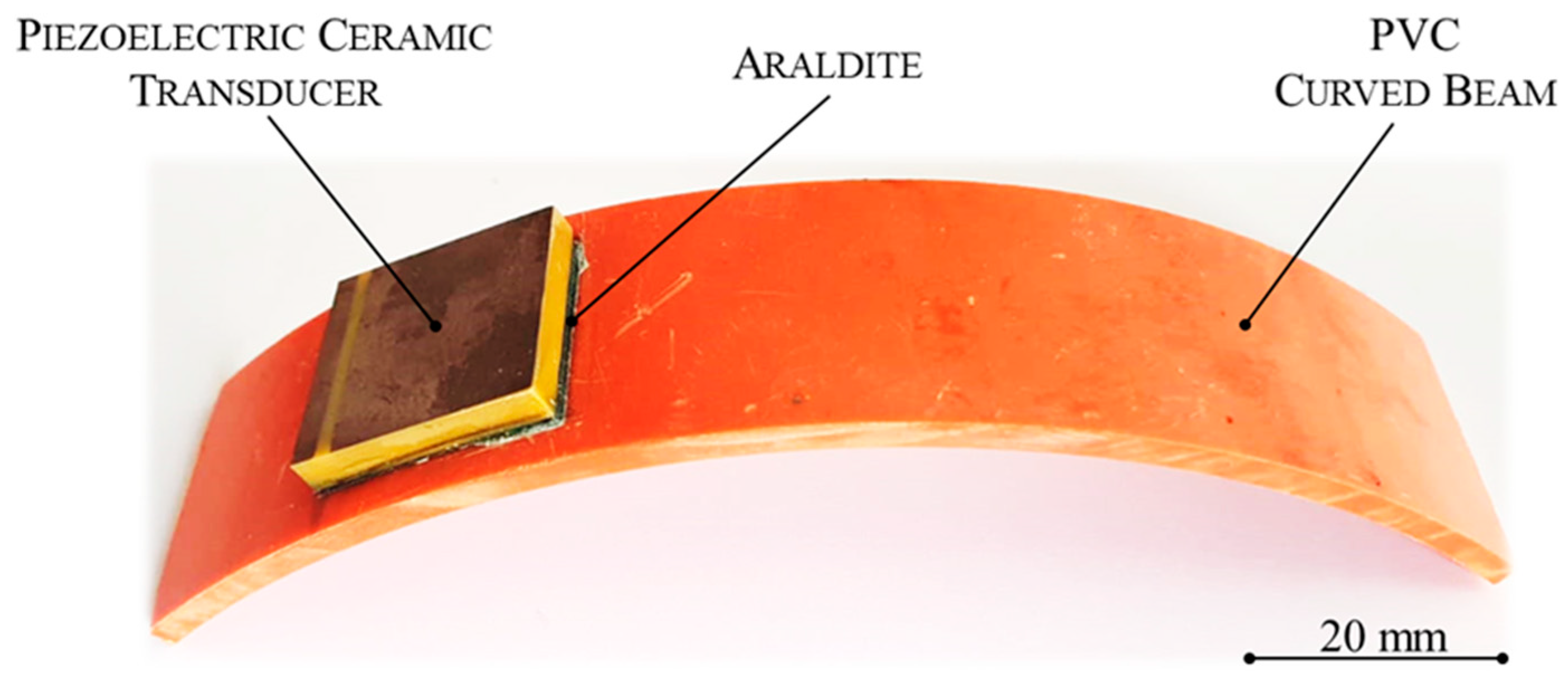
3.2.1. Description and Preparation of the Test Specimens
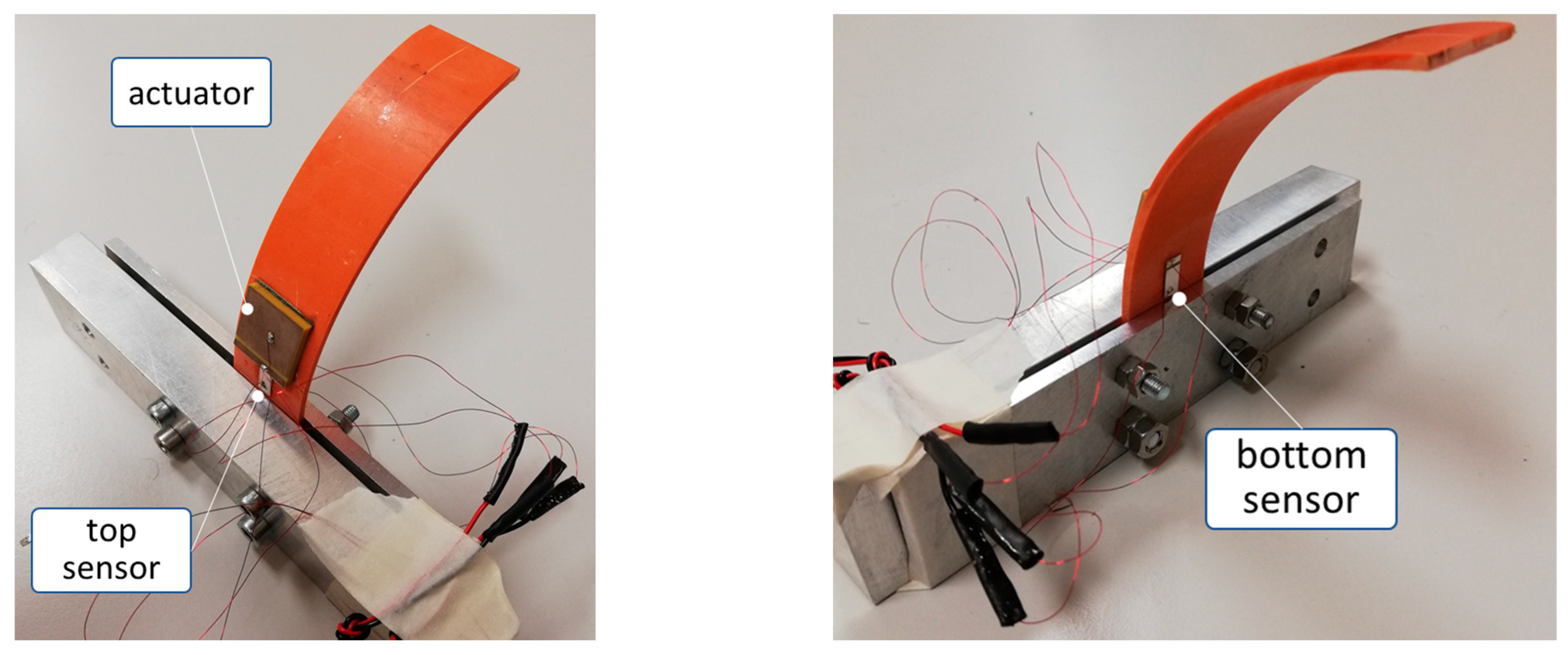
3.2.2. Description of the Test Setup
3.2.3. Experimental Results and Discussion
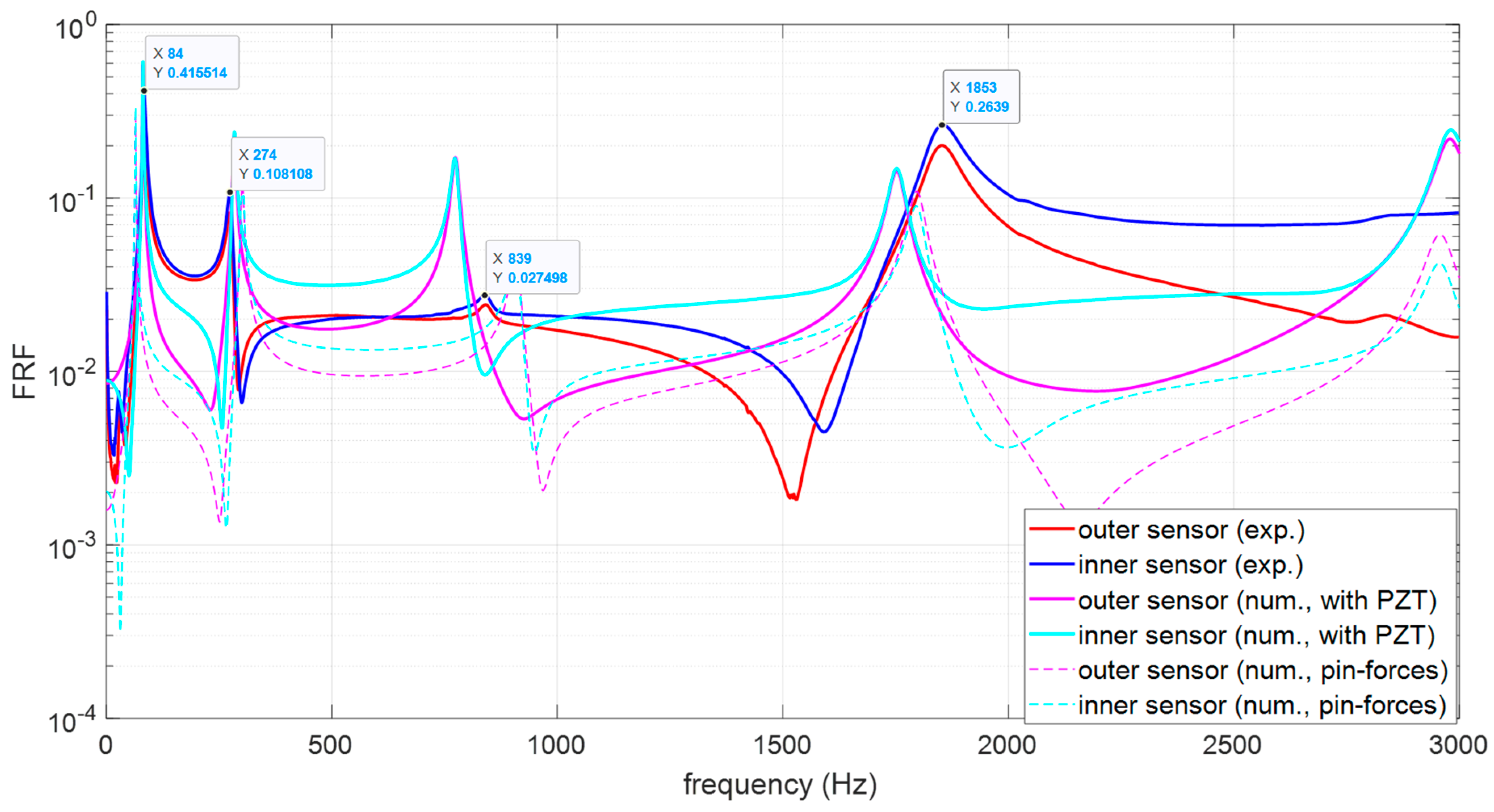
- A direct comparison should be done between the solid lines referring to the experimental (red and blue) and numerical (magenta and cyan) data, since all of them refer to the beam with the piezo actuator mounted on it. The numerical model seems to be adequate not only in the static condition but also for a certain dynamic range, as suggested by the good agreement found for the first two peaks at 84 and 274 Hz; amplitude differences were noticed, although they can be attributed to the system damping not having an impact on the proposed model;
- The deviation between the experimental outcomes with piezo forces (red and blue solid lines) and numerical predictions with pin forces replacing the piezo forces (magenta and cyan dashed lines) are due to the remarkable effect of the piezo patch on the overall dynamic response, both in terms of the mass and stiffness; it is, however, worth noting that once again a good agreement is found for the two peaks. The remaining peaks in the range do not differ so much in terms of frequency but they do in terms of magnitude.
3.3. Parameterization Results
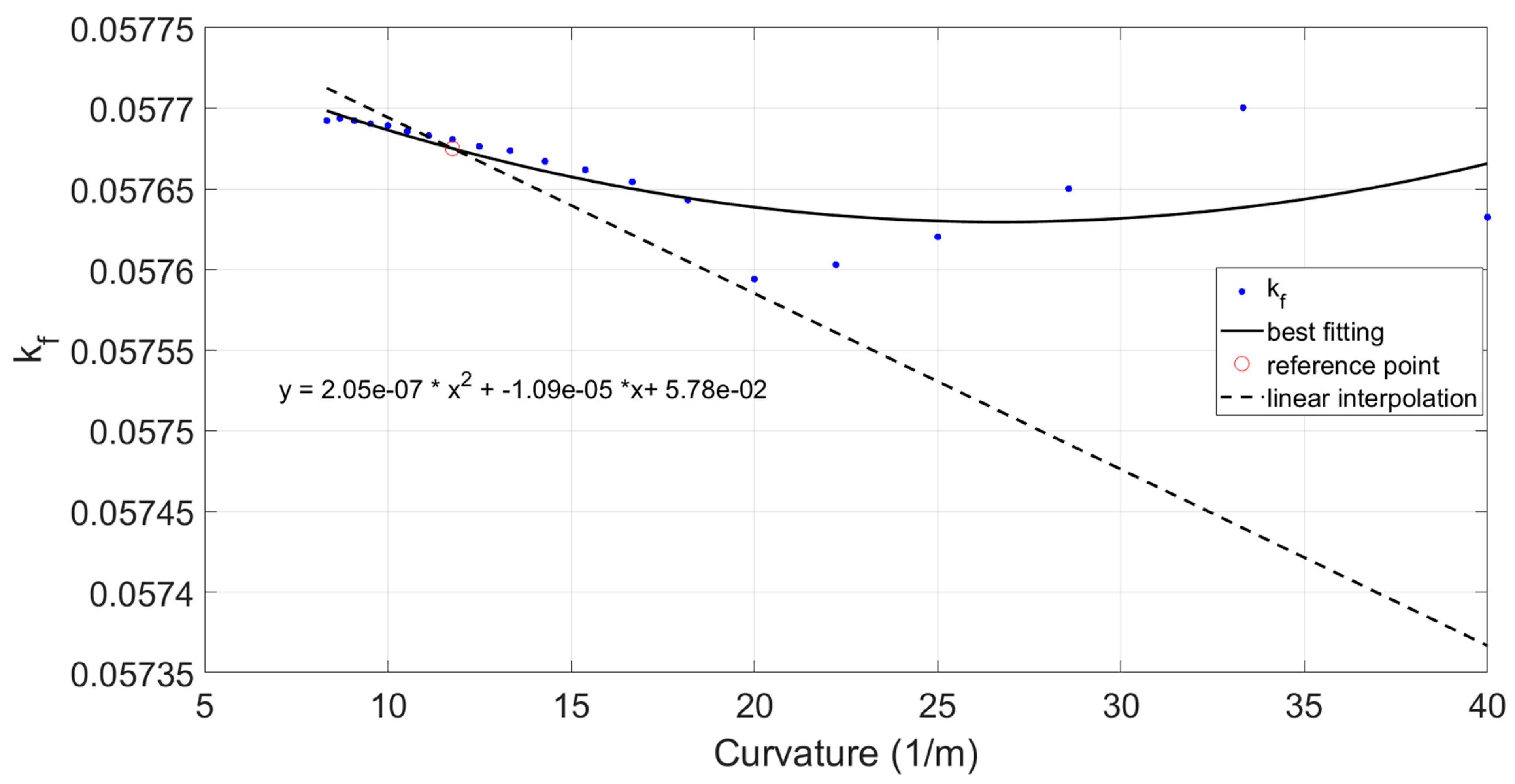
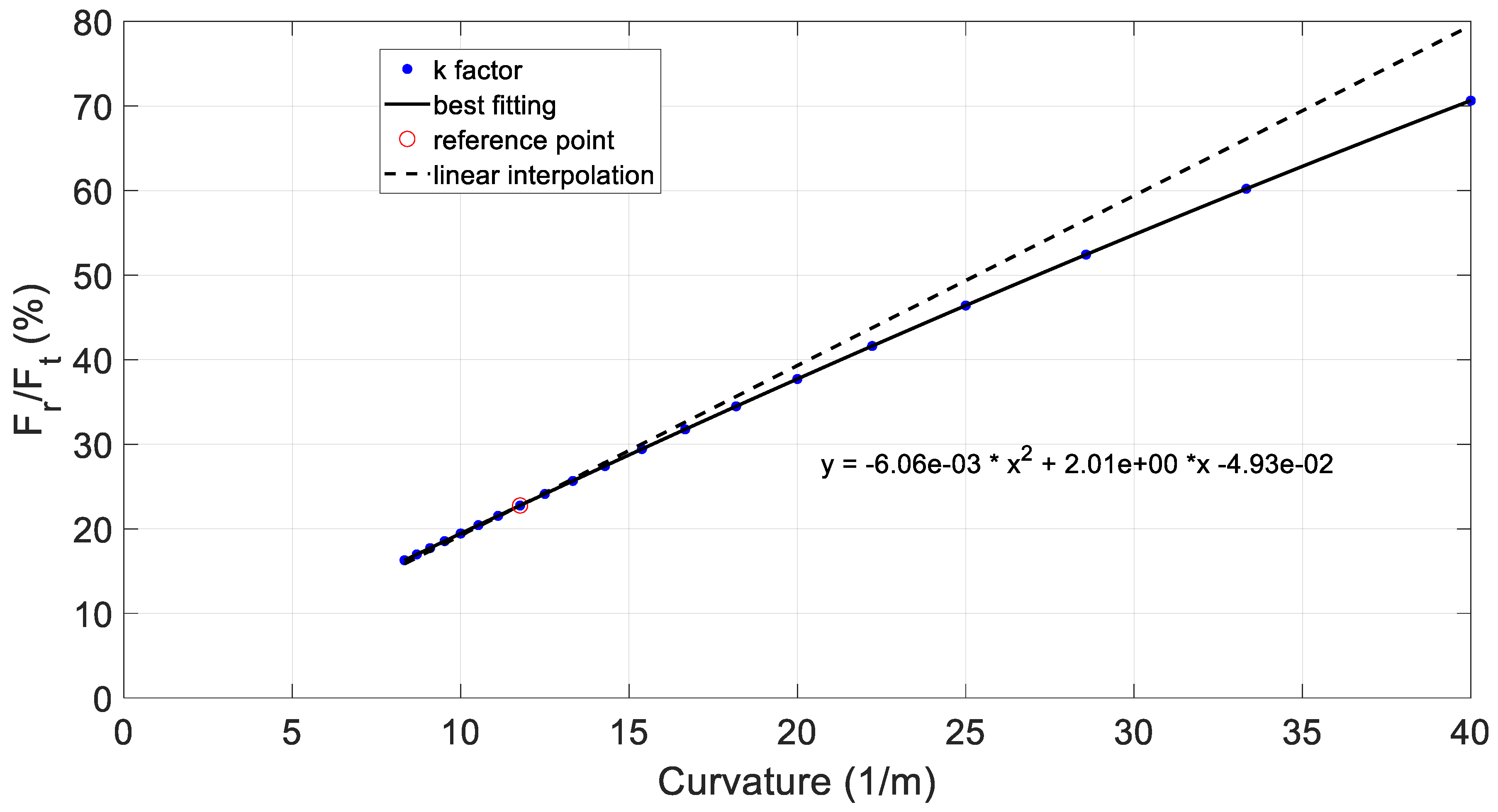
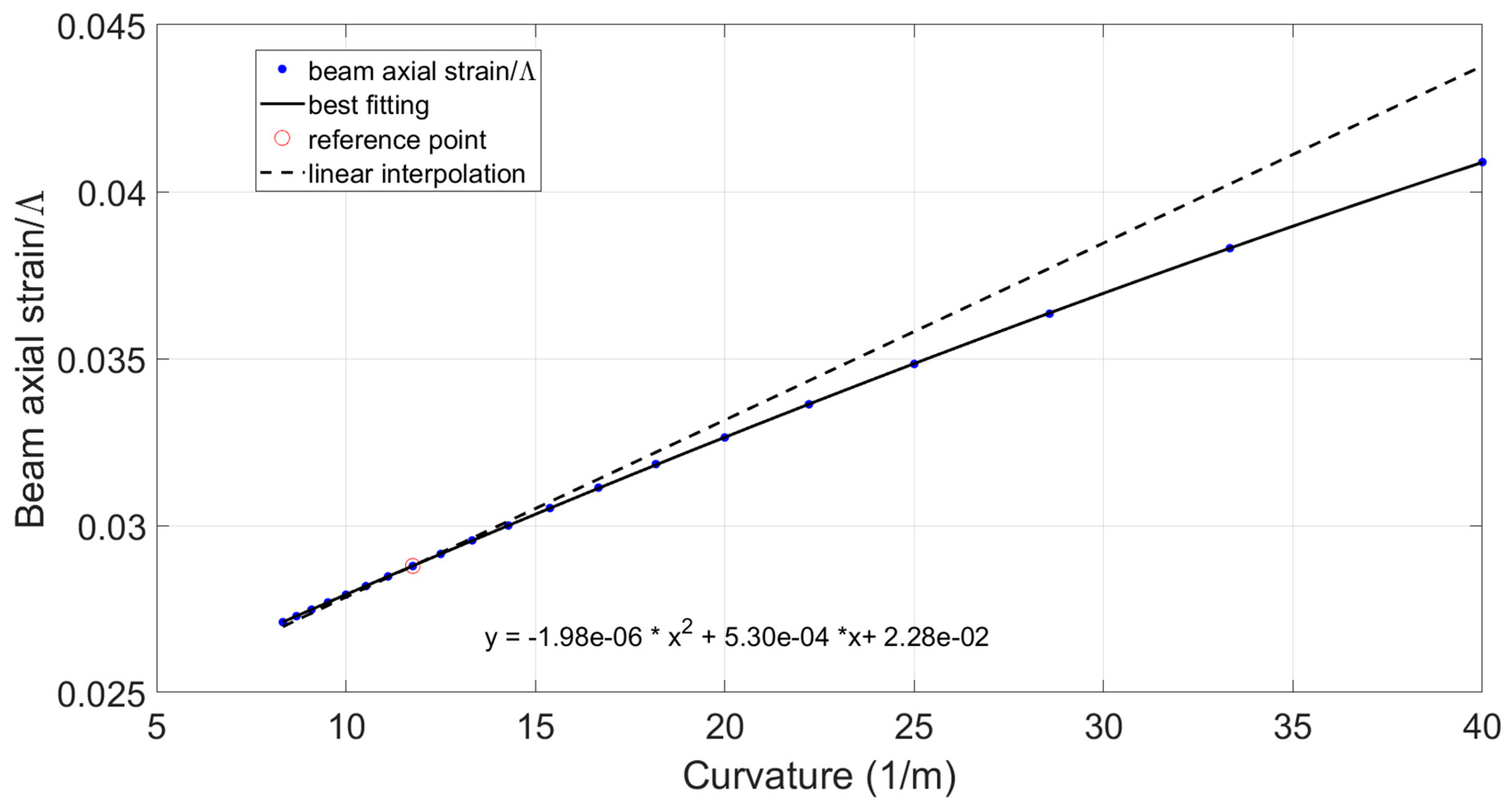
3.3.1. Effect of the Beam Curvature on the Transmission Force and Deformation
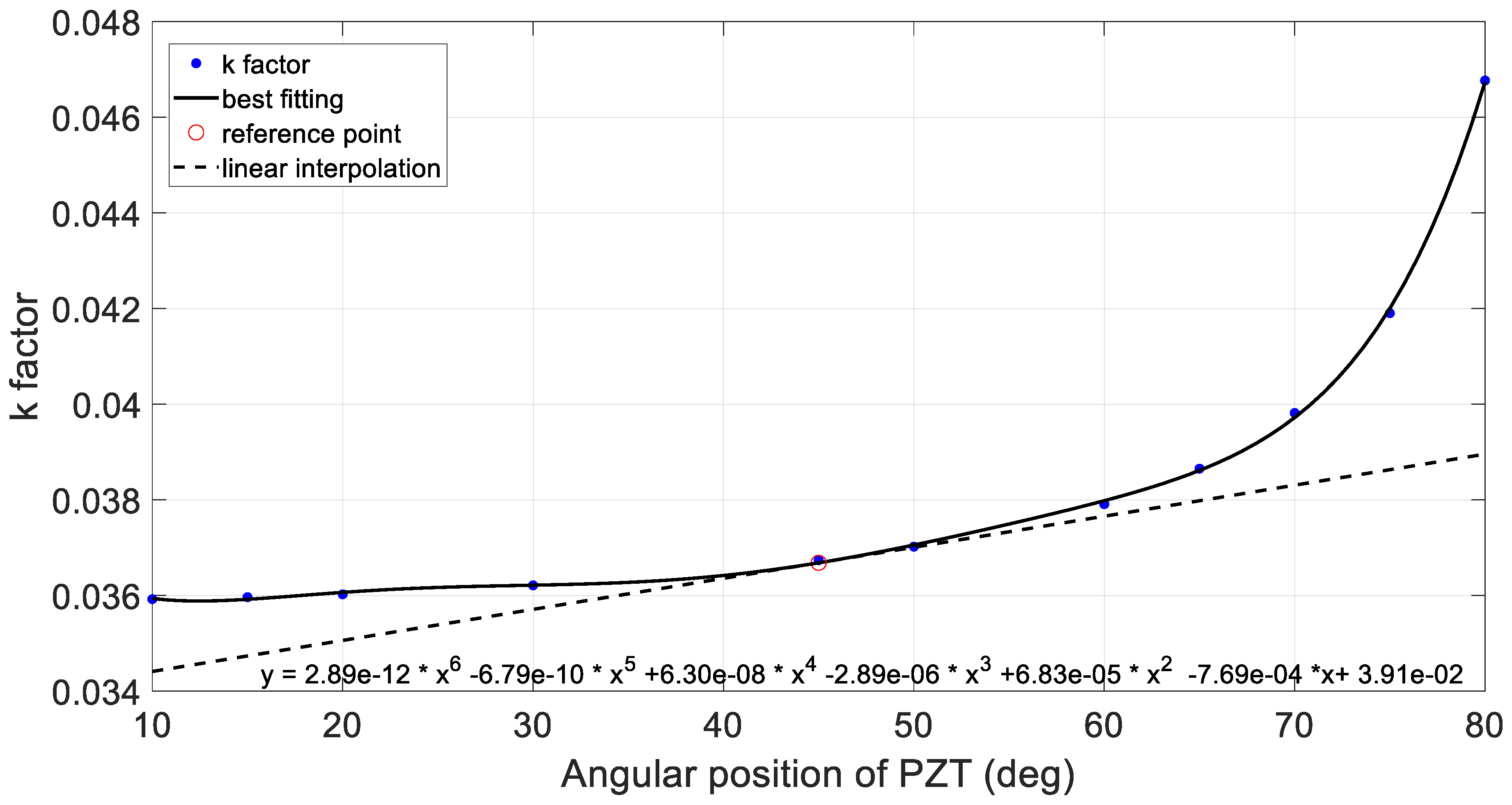
3.3.2. Effects of the Position of the Piezo Device on Transmission Force and Deformation
3.3.3. Effect of the Length of the Piezo Patch on Transmission Force and Deformation
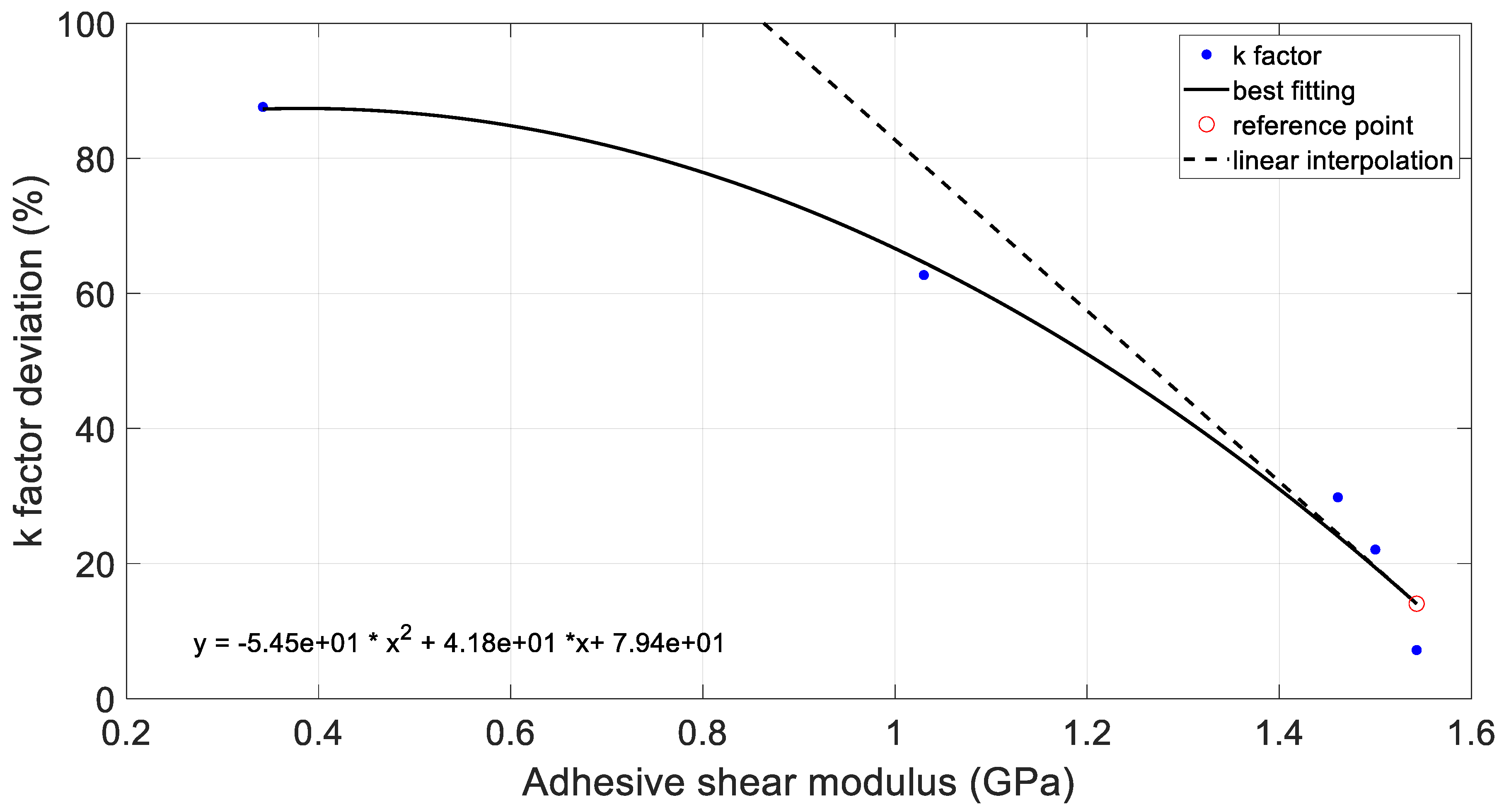
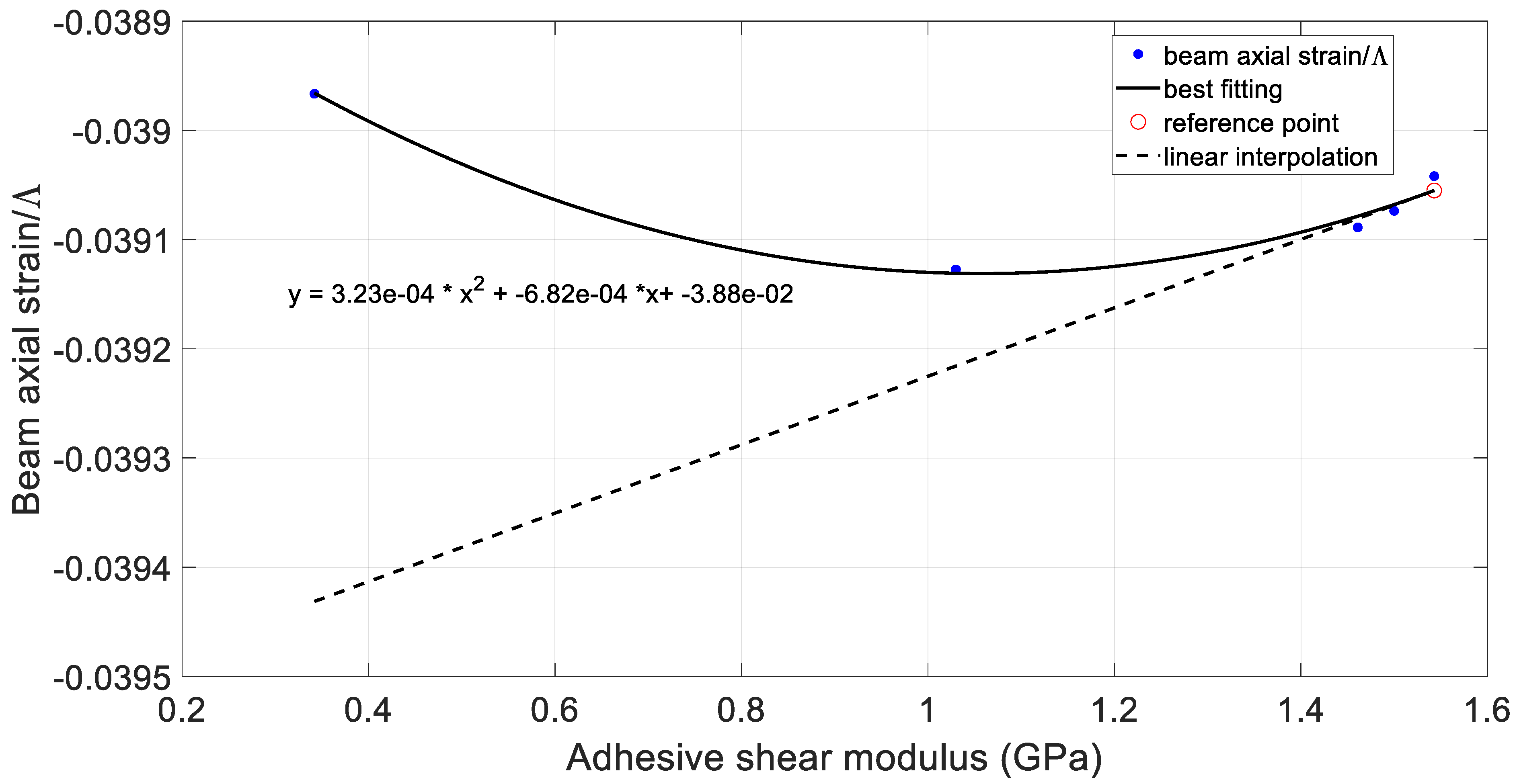
3.3.4. Effect of the Type of Adhesive on the Transmission Force and Deformation
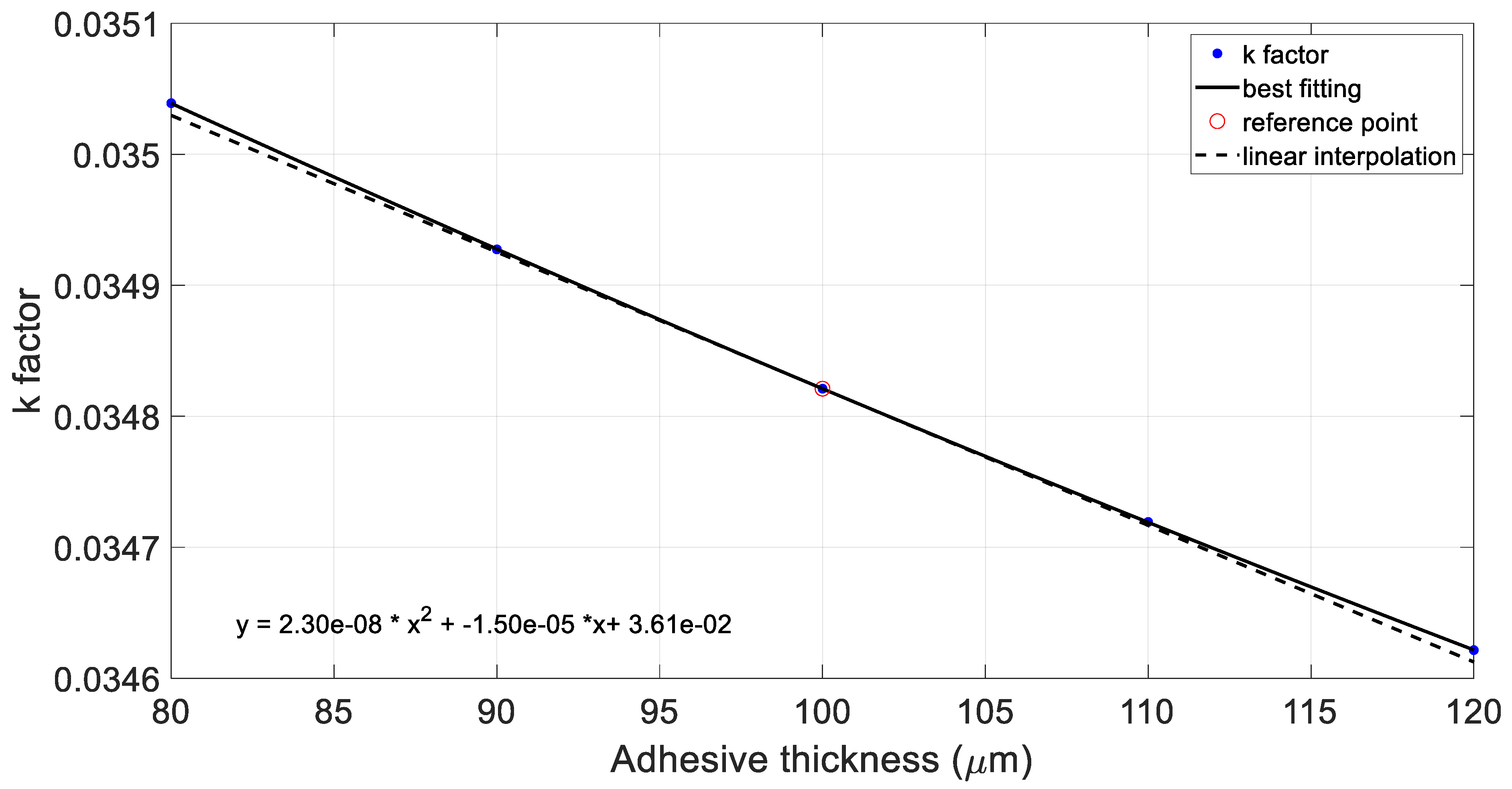
3.3.5. Effects of the Thickness of the Layer of Adhesive on the Transmission Force and Deformation
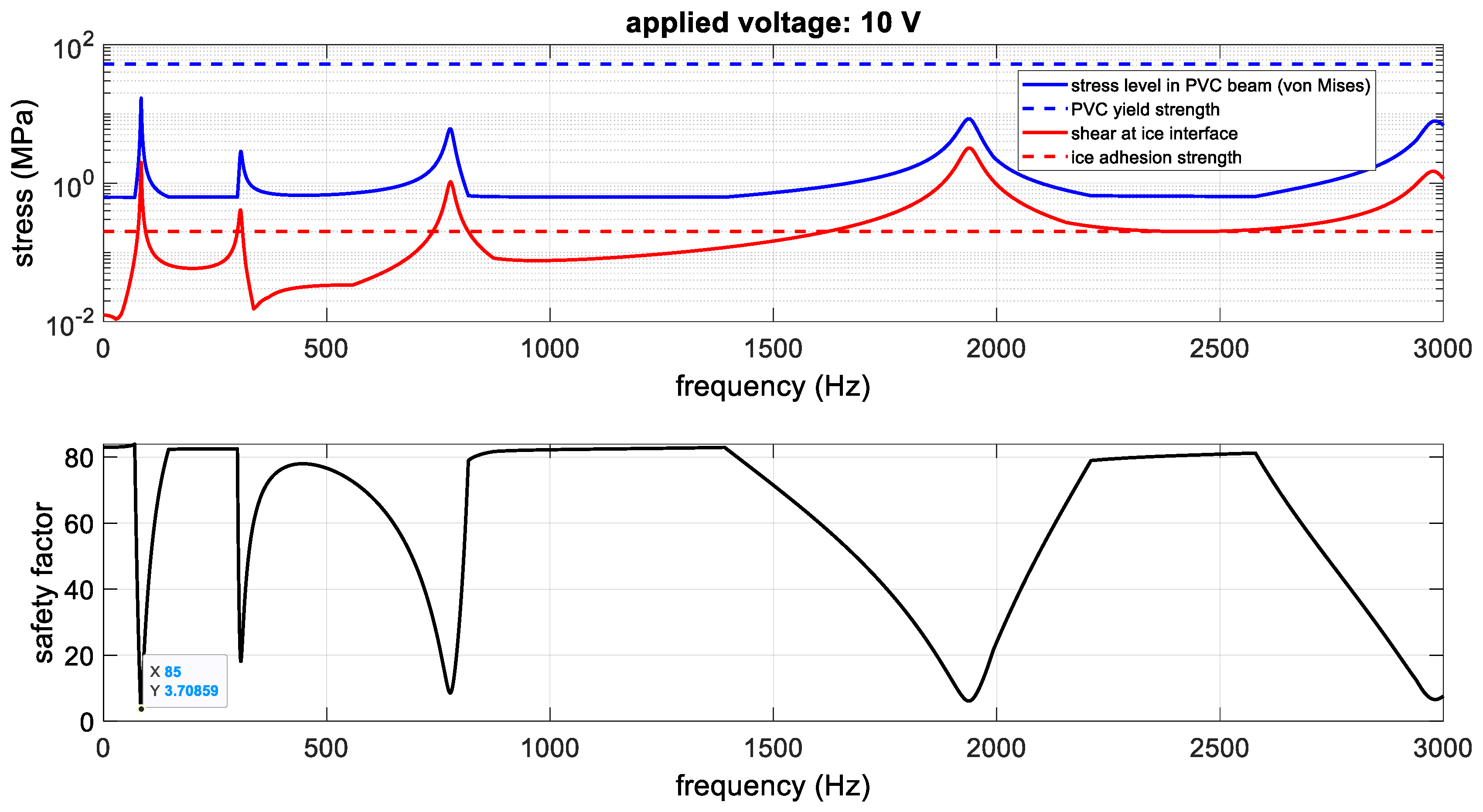
3.3.6. Impact of the Piezo Actuator on Ice Protection
4. Conclusions and Future Steps
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Acronyms and Symbols
| Simulated (FEM) piezoelectric thermal expansion coefficient featuring a voltage effect (converse piezoelectric effect) | |
| Airfoil’s local curvature | |
| Airfoil’s average curvature | |
| d31 | Transversal converse piezoelectric constant |
| Deflection due to pin forces | |
| Deflection due to thermal load | |
| Ep | Young’s modulus of the piezoelectric actuator |
| Es | Young’s modulus of the structural element |
| Fr | Radial pin force |
| Ft | Tangential pin force |
| Ga | Shear modulus of the adhesive layer |
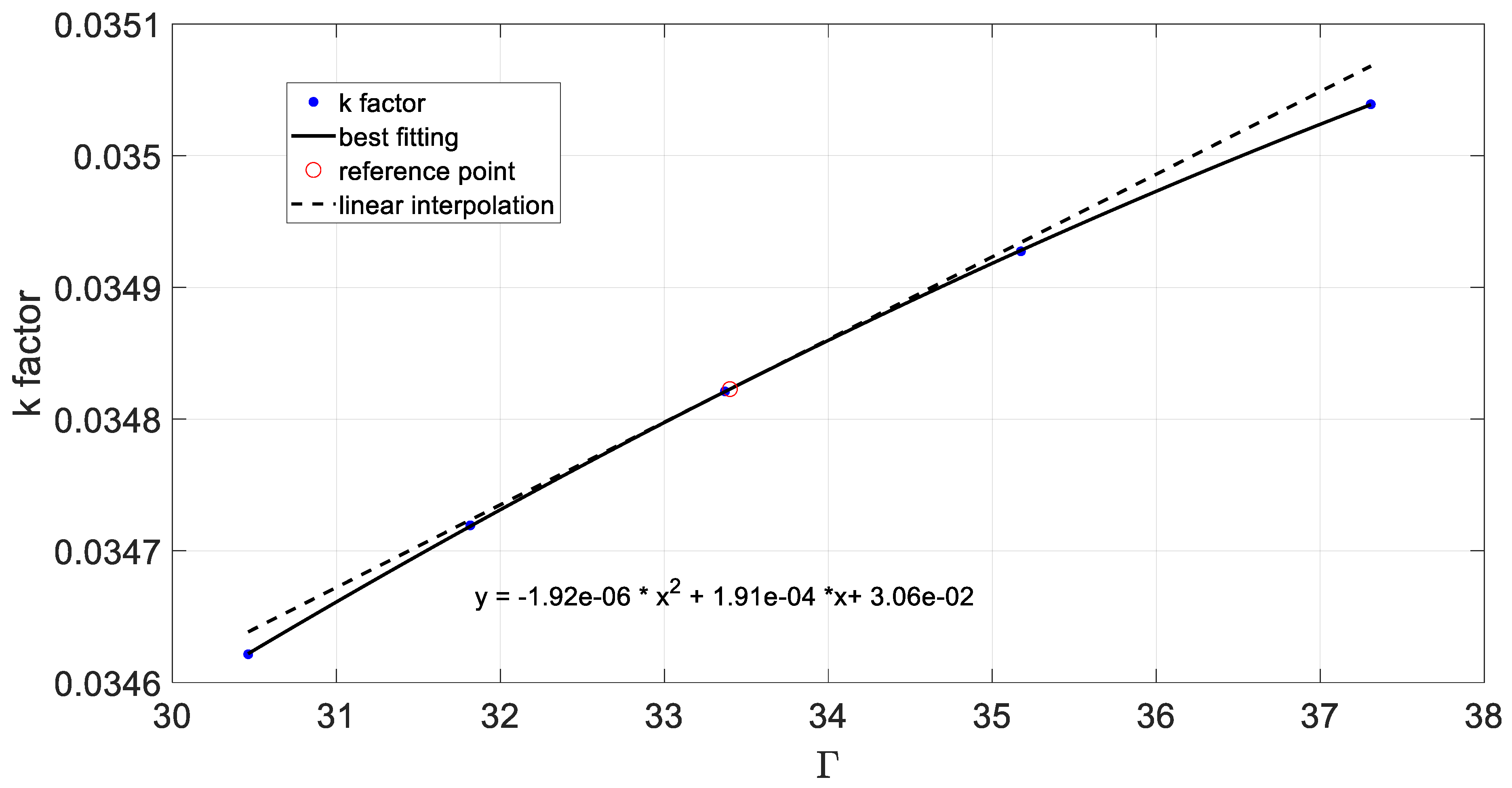
| Γ | Bonding (or adhesion) quality factor |
| Thermal load over pin force beam deflection | |
| L | Piezoelectric actuator length |
| Piezoelectric disk-equivalent in-plane length | |
| Λ = d31V/tc | Strain of the unconstrained piezo device under the voltage V |
| Poisson’s modulus of the piezoelectric actuator | |
| Poisson’s modulus of the structural element | |
| Thickness ratio | |
| ta | Thickness of the adhesive layer |
| tp | Thickness of the piezoelectric actuator |
| ts | Thickness of the structural element |
| Elastic constant ratio | |
| θ | Tangential coordinate |
| ψ | Stiffness constant ratio |
| V | Piezoelectric driving voltage |
| x | Abscissa along the piezoelectric actuator length |
| x′ | Non-dimensional abscissa |
References
- Fath, A.; Xia, T.; Li, W. Recent Advances in the Application of Piezoelectric Materials in Microrobotic Systems. Micromachines 2022, 13, 1422. [Google Scholar] [CrossRef]
- Aabid, A.; Raheman, M.A.; Ibrahim, Y.E.; Anjum, A.; Hrairi, M.; Parveez, B.; Parveen, N.; Mohammed Zayan, J. A Systematic Review of Piezoelectric Materials and Energy Harvesters for Industrial Applications. Sensors 2021, 21, 4145. [Google Scholar] [CrossRef]
- Villeneuve, E.; Ghinet, S.; Volat, C. Experimental Study of a Piezoelectric De-Icing System Implemented to Rotorcraft Blades. Appl. Sci. 2021, 11, 9869. [Google Scholar] [CrossRef]
- Villeneuve, E.; Volat, C.; Ghinet, S. Numerical and Experimental Investigation of the Design of a Piezoelectric De-Icing System for Small Rotorcraft Part 2/3: Investigation of Transient Vibration during Frequency Sweeps and Optimal Piezoelectric Actuator Excitation. Aerospace 2020, 7, 49. [Google Scholar] [CrossRef]
- Sakaue, H. Special Issue: Deicing and Anti-Icing of Aircrafts. Aerospace 2021, 8, 72. [Google Scholar] [CrossRef]
- Li, Y.; Shen, H.; Guo, W. Effect of Ultrasonic Vibration on the Surface Adhesive Characteristic of Iced Aluminum Alloy Plate. Appl. Sci. 2022, 12, 2357. [Google Scholar] [CrossRef]
- Cao, Y.; Tan, W.; Su, Y.; Xu, Z.; Zhong, G. The Effects of Icing on Aircraft Longitudinal Aerodynamic Characteristics. Mathematics 2020, 8, 1171. [Google Scholar] [CrossRef]
- Yamazaki, M.; Jemcov, A.; Sakaue, H. A Review on the Current Status of Icing Physics and Mitigation in Aviation. Aerospace 2021, 8, 188. [Google Scholar] [CrossRef]
- Li, S.; Paoli, R. Aircraft Icing Severity Evaluation. Encyclopedia 2022, 2, 56–69. [Google Scholar] [CrossRef]
- Teixeira, J. The “Puzzle” of Water Behavior at Low Temperature. Water 2010, 2, 702–710. [Google Scholar] [CrossRef] [Green Version]
- Tan, M.; Mei, J.; Xie, J. The Formation and Control of Ice Crystal and Its Impact on the Quality of Frozen Aquatic Products: A Review. Crystals 2021, 11, 68. [Google Scholar] [CrossRef]
- Zhao, Y.; Zuo, Z.; Tang, H.; Zhang, X. Ice Coverage Induced by Depositing a Water Drop onto the Supercooled Substrate at Extreme Low Vapor Pressure. Crystals 2021, 11, 691. [Google Scholar] [CrossRef]
- Camisasca, G.; De Marzio, M.; Rovere, M.; Gallo, P. Slow Dynamics and Structure of Supercooled Water in Confinement. Entropy 2017, 19, 185. [Google Scholar] [CrossRef] [Green Version]
- Jiang, X.; Wang, Y. Studies on the Electro-Impulse De-Icing System of Aircraft. Aerospace 2019, 6, 67. [Google Scholar] [CrossRef] [Green Version]
- Muhammed, M.; Virk, M.S. Ice Accretion on Fixed-Wing Unmanned Aerial Vehicle—A Review Study. Drones 2022, 6, 86. [Google Scholar] [CrossRef]
- Tamer, O.; Walter, F.; Sinapius, M.; Böl, M. A Computational Geometric Parameter Optimization of the Thermomechanical Deicing Concept. Actuators 2022, 11, 223. [Google Scholar] [CrossRef]
- Ding, L.; Wang, X.; Zhang, W.; Wang, S.; Zhao, J.; Li, Y. Microwave Deicing Efficiency: Study on the Difference between Microwave Frequencies and Road Structure Materials. Appl. Sci. 2018, 8, 2360. [Google Scholar] [CrossRef] [Green Version]
- Shi, Z.; Zhao, Y.; Ma, C.; Zhang, J. Parametric Study of Ultrasonic De-Icing Method on a Plate with Coating. Coatings 2020, 10, 631. [Google Scholar] [CrossRef]
- Palacios, J.; Zhu, Y.; Smith, E.; Rose, J. Ultrasonic shear and lamb wave interface stress for helicopter rotor de-icing purposes. In Proceedings of the 47th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference 14th AIAA/ASME/AHS Adaptive Structures Conference, Newport, RI, USA, 1–4 May 2006. [Google Scholar]
- Palacios, J.L.; Smith, E.C.; Zhu, Y.; Rose, J.L.; Morrow, P. Global ultrasonic shear wave anti-icing actuator for helicopter blades. In Proceedings of the Annual Forum Proceedings-American Helicopter Society, Virginia Beach, VI, USA, 1–3 May 2007. [Google Scholar]
- Ameduri, S.; Brindisi, A.; Concilio, A.; Giusto, G.; Maio, L.; Memmolo, V.; Notarnicola, L.; Pellone, L.; Piscitelli, F.; Ricci, F. Design and realisation of a Wind Tunnel model for ice protection system demonstration. In Proceedings of the 2022 IEEE 9th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Pisa, Italy, 27–29 June 2022. [Google Scholar]
- Maio, L.; Piscitelli, F.; Ameduri, S.; Brindisi, A.; Pellone, L.; Memmolo, V.; Ricci, F.; Concilio, A.; Laracca, M. On the use of smart on-board systems for aircraft ice removal. In Proceedings of the 2020 IEEE 7th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Pisa, Italy, 22–24 June 2020. [Google Scholar]
- Crawley, E.F.; Luis, J.D. Use of Piezoelectric Actuators as Elements of Intelligent Structures. AIAA J. 1987, 25, 1373–1385. [Google Scholar] [CrossRef]
- Dimitriadis, E.; Fuller, C.; Rogers, C.A. Piezoelectric Actuators for Distributed Vibration Excitation of Thin Plates. J. Vib. Acoust. 1991, 113, 100–107. [Google Scholar] [CrossRef]
- Tinti, A.; Carallo, G.A.; Greco, A.; Romero-Sánchez, M.D.; Vertuccio, L.; Guadagno, L. Effective Practical Solutions for De-Icing of Automotive Component. Nanomaterials 2022, 12, 2979. [Google Scholar] [CrossRef] [PubMed]
- Meshkinzar, A.; Al-Jumaily, A.M. Cylindrical Piezoelectric PZT Transducers for Sensing and Actuation. Sensors 2023, 23, 3042. [Google Scholar] [CrossRef] [PubMed]
- Marshall, S.J.; Bayne, S.C.; Baier, R.; Tomsia, A.P.; Marshall, G.M. A review of adhesion science. Dent. Mater. 2010, 26, 11–16. [Google Scholar] [CrossRef] [PubMed]
- Packham, D.E. Surface energy, surface topography and adhesion. Int. J. Adhes. Adhes. 2003, 23, 437–448. [Google Scholar] [CrossRef] [Green Version]
- Martowicz, A.; Uhl, T.; Stepinski, T. Uncertainty and sensitivity analysis of electro-mechanical impedance based SHM system. IOP Conf. Ser. Mater. Sci. Eng. 2010, 10, 012207. [Google Scholar] [CrossRef]
- Emelyanenko, K.A.; Emelyanenko, A.M.; Boinovich, L.B. Water and Ice Adhesion to Solid Surfaces: Common and Specific, the Impact of Temperature and Surface Wettability. Coatings 2020, 10, 648. [Google Scholar] [CrossRef]
- Engineering ToolBox. Ice—Mechanical Properties. Available online: https://www.engineeringtoolbox.com/ice-properties-mechanical-d_2179.html (accessed on 25 July 2023).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | |
|---|---|---|
| Arc | material | PVC |
| elastic modulus (GPa) | 2.89 | |
| Poisson ratio | 0.41 | |
| yield strength (MPa) | 52 | |
| mean line radius (mm) | 75 | |
| thickness (mm) | 2.7 | |
| piezoelectric | material | PK-11 |
| elastic modulus (GPa) | 60 | |
| Poisson ratio | 0.35 | |
| thickness (mm) | 3.0 | |
| d31 (m/V) | 179 × 10−12 | |
| Internal Radii (m) | Curvature (1/m) | Angular Position of PZT (deg) | Angular Extension of PZT (deg) |
|---|---|---|---|
| 0.025 | 40.00 | 135.00 | 41.37 |
| 0.030 | 33.33 | 112.50 | 35.04 |
| 0.035 | 28.57 | 96.43 | 30.40 |
| 0.040 | 25.00 | 84.38 | 26.84 |
| 0.045 | 22.22 | 75.00 | 24.02 |
| 0.050 | 20.00 | 67.50 | 21.74 |
| 0.055 | 18.18 | 61.36 | 19.86 |
| 0.060 | 16.67 | 56.25 | 18.28 |
| 0.065 | 15.38 | 51.92 | 16.93 |
| 0.070 | 14.29 | 48.21 | 15.76 |
| 0.075 | 13.33 | 45.00 | 14.75 |
| 0.080 | 12.50 | 42.19 | 13.86 |
| 0.085 | 11.76 | 39.71 | 13.07 |
| 0.090 | 11.11 | 37.50 | 12.36 |
| 0.095 | 10.53 | 35.53 | 11.73 |
| 0.100 | 10.00 | 33.75 | 11.16 |
| 0.105 | 9.52 | 32.14 | 10.64 |
| 0.110 | 9.09 | 30.68 | 10.17 |
| 0.115 | 8.70 | 29.35 | 9.74 |
| 0.120 | 8.33 | 28.13 | 9.34 |
| Internal Radii (m) | Curvature (1/m) | Angular Position of PZT (deg) | Angular Extension of PZT (deg) |
|---|---|---|---|
| 0.075 | 13.33 | 10 | 14.75 |
| 0.075 | 13.33 | 15 | 14.75 |
| 0.075 | 13.33 | 20 | 14.75 |
| 0.075 | 13.33 | 30 | 14.75 |
| 0.075 | 13.33 | 45 | 14.75 |
| 0.075 | 13.33 | 50 | 14.75 |
| 0.075 | 13.33 | 60 | 14.75 |
| 0.075 | 13.33 | 65 | 14.75 |
| 0.075 | 13.33 | 70 | 14.75 |
| 0.075 | 13.33 | 75 | 14.75 |
| 0.075 | 13.33 | 80 | 14.75 |
| Internal Radii (m) | Curvature (1/m) | Angular Position of PZT (deg) | Angular Extension of PZT (deg) |
|---|---|---|---|
| 0.075 | 13.33 | 45 | 10 |
| 0.075 | 13.33 | 45 | 14.75 |
| 0.075 | 13.33 | 45 | 20 |
| 0.075 | 13.33 | 45 | 30 |
| 0.075 | 13.33 | 45 | 40 |
| 0.075 | 13.33 | 45 | 50 |
| 0.075 | 13.33 | 45 | 60 |
| 0.075 | 13.33 | 45 | 70 |
| Adhesive | Shear Modulus (GPa) | Young’s Modulus (GPa) | Poisson’s Ratio |
|---|---|---|---|
| Loctite-Hysol-9395 | 1.543 | 4.94 | 0.6 |
| 3M Scotch-Weld Epoxy DP490 | 1.5 | 4.5 | 0.5 |
| Loctite-Hysol-9394 | 1.461 | 4.237 | 0.45 |
| 3M Scotch-Weld Structural AF 3109-2 | 1.03 | 2.69 | 0.31 |
| 3M 2216 | 0.342 | 0.958 | 0.4 |
| Adhesive Thickness (μm) | Internal Radii (m) | Curvature (1/m) | PZT ang. Position (deg) | PZT ang. Extension (deg) |
|---|---|---|---|---|
| 80.0 | 0.075 | 13.33 | 45 | 14.75 |
| 90.0 | 0.075 | 13.33 | 45 | 14.75 |
| 100.0 | 0.075 | 13.33 | 45 | 14.75 |
| 110.0 | 0.075 | 13.33 | 45 | 14.75 |
| 120.0 | 0.075 | 13.33 | 45 | 14.75 |
| Tip Radial Displacement Produced by a Unitary Thermal Load (mm) | Tip Radial Displacement Produced by Unitary Tangential Pin Forces (mm) | Absolute Value of the Tangential Force Applied on the Outer Piezo (N) | Absolute Value of the Tangential Force Applied on the Inner Piezo (N) |
|---|---|---|---|
| 3.02 × 10−8 | 6.03 × 10−7 | 17.33 | 17.33 |
| Transmission Factor on Curved Beam (Internal Curvature Radius: 75 mm) | Transmission Factor on Flat Beam, Theoretical Value, Equation (9) |
|---|---|
| 2.89 × 10−3 | 3.13 × 10−3 |
| Beam | Material | PVC (see Table 1) |
| Mean radius (mm) | 76.35 | |
| Thickness (mm) | 2.7 | |
| Width (mm) | 30 | |
| Angular extension (deg) | 90 | |
| Constraint condition | Cantilevered | |
| Piezo actuator | Material | PK-11 (see Table 1) |
| Dimensions (mm) | 20 × 20 × 3 | |
| Piezo transducers | Material | PIC-151 |
| Young’s modulus (GPa) | 15.7 | |
| g31 (Vm/N) | −10.1 × 10−3 | |
| Dimensions (mm) | 12 × 5 × 0.3 | |
| Adhesive | Material | Araldite 420 |
| Thickness (mm) | 0.1 | |
| Density (g/cm3) | 1.20 | |
| Young’s modulus at 23 °C (GPa) | 1.5 | |
| Shear modulus at 23 °C (GPa) | 0.73 | |
| Poisson ratio | 0.33 | |
| Tensile strength at 23 °C (MPa) | 29 |
| Adhesive | Γ | Shear Modulus (GPa) | Tip Displacement—Eq. Thermal Exp (m) | Tip Displacement—Eq. Force (m) | k | Δk (%) |
|---|---|---|---|---|---|---|
| Loctite-Hysol-9395 | 28.5 | 1.543 | −1.50 × 10−8 | −6.23 × 10−8 | 0.241 | −7.18 |
| 3M Scotch-Weld Epoxy DP490 | 28.1 | 1.5 | −1.47 × 10−8 | −7.30 × 10−8 | 0.202 | −22.07 |
| Loctite-Hysol-9394 | 27.7 | 1.461 | −1.46 × 10−8 | −8.01 × 10−8 | 0.182 | −29.80 |
| 3M Scotch-Weld Structural AF 3109-2 | 23.3 | 1.03 | −1.35 × 10−8 | −1.40 × 10−7 | 0.097 | −62.72 |
| 3M 2216 | 13.4 | 0.342 | −1.18 × 10−8 | −3.67 × 10−7 | 0.032 | −87.61 |
| No adhesive | h | - | −1.61 × 10−8 | −6.23 × 10−8 | 0.259 | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ameduri, S.; Castrovinci, A.; Perna, A.S.; Viscusi, A.; Concilio, A.; Carrino, L. Modeling of Strain Actuation on Relatively Soft Curved Beams by Piezoelectric Ceramics for De-Icing Systems. Appl. Sci. 2023, 13, 9104. https://doi.org/10.3390/app13169104
Ameduri S, Castrovinci A, Perna AS, Viscusi A, Concilio A, Carrino L. Modeling of Strain Actuation on Relatively Soft Curved Beams by Piezoelectric Ceramics for De-Icing Systems. Applied Sciences. 2023; 13(16):9104. https://doi.org/10.3390/app13169104
Chicago/Turabian StyleAmeduri, Salvatore, Armando Castrovinci, Alessia Serena Perna, Antonio Viscusi, Antonio Concilio, and Luigi Carrino. 2023. "Modeling of Strain Actuation on Relatively Soft Curved Beams by Piezoelectric Ceramics for De-Icing Systems" Applied Sciences 13, no. 16: 9104. https://doi.org/10.3390/app13169104