
Dynamic Bending Model Describing the Generation of Negative Stiffness by Buckled Beams: Qualitative Analysis and Experimental Verification



Abstract
:1. Introduction
2. Theoretical Insight
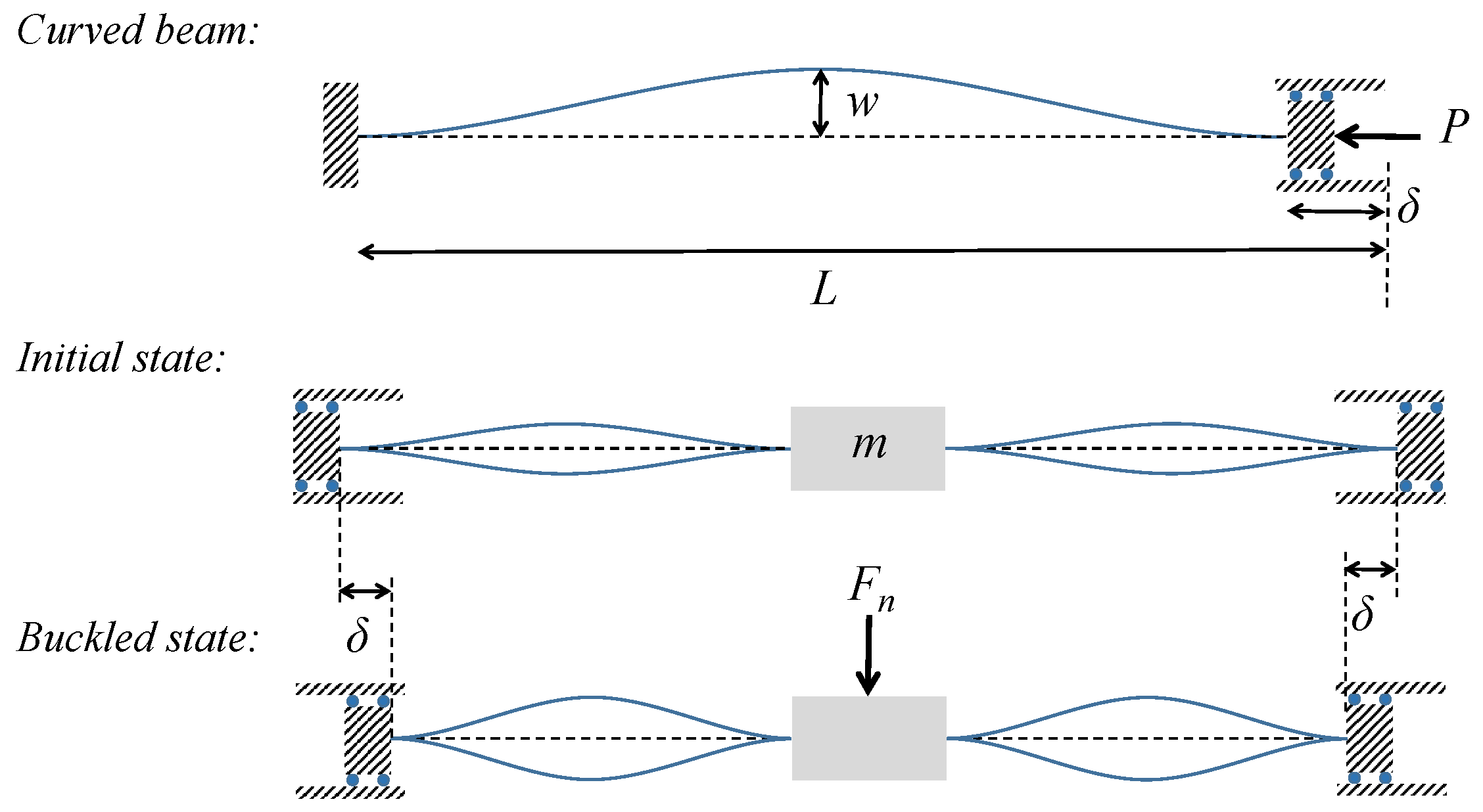
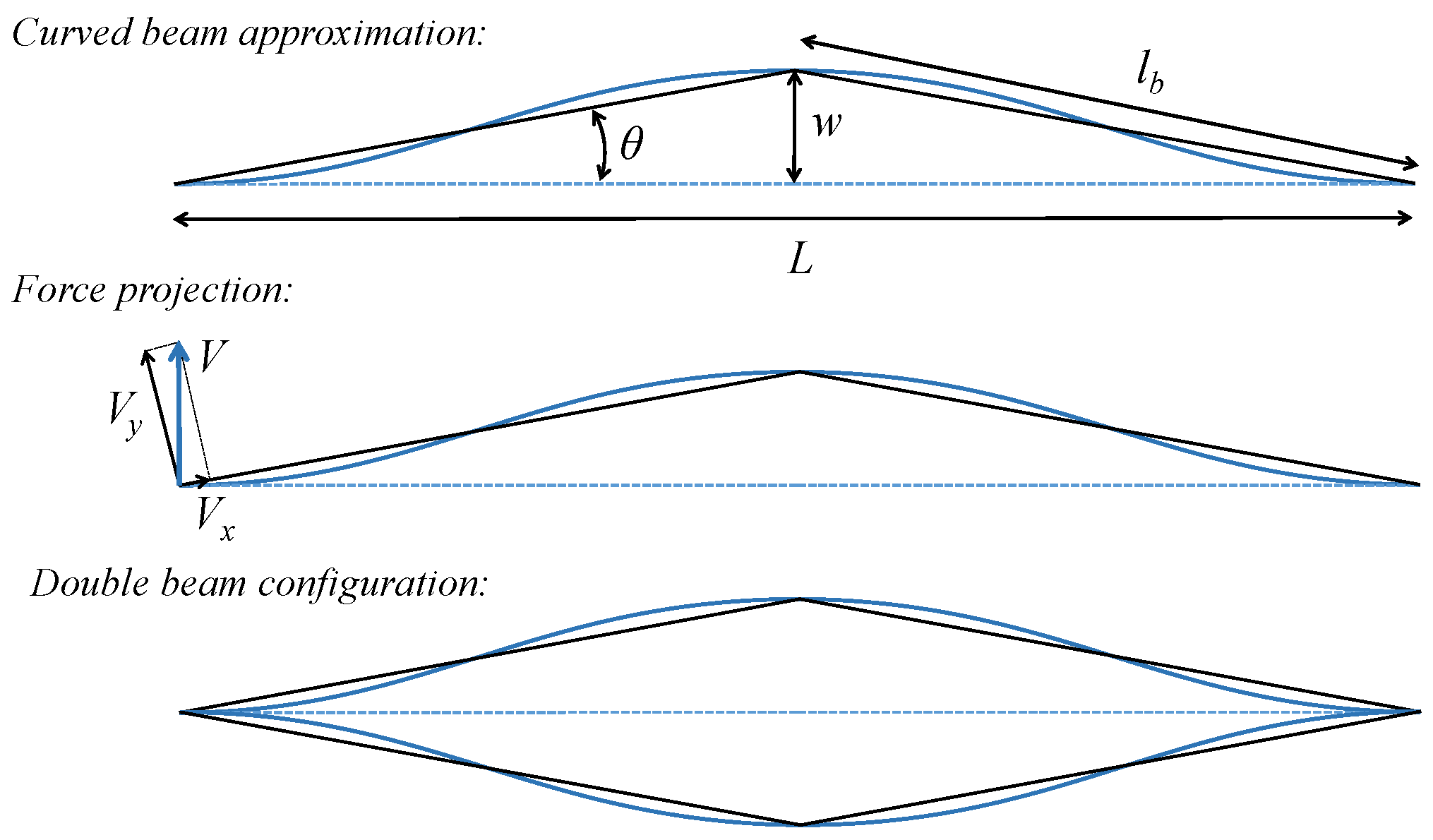
2.1. Negative Stiffness from Buckled Euler Beams
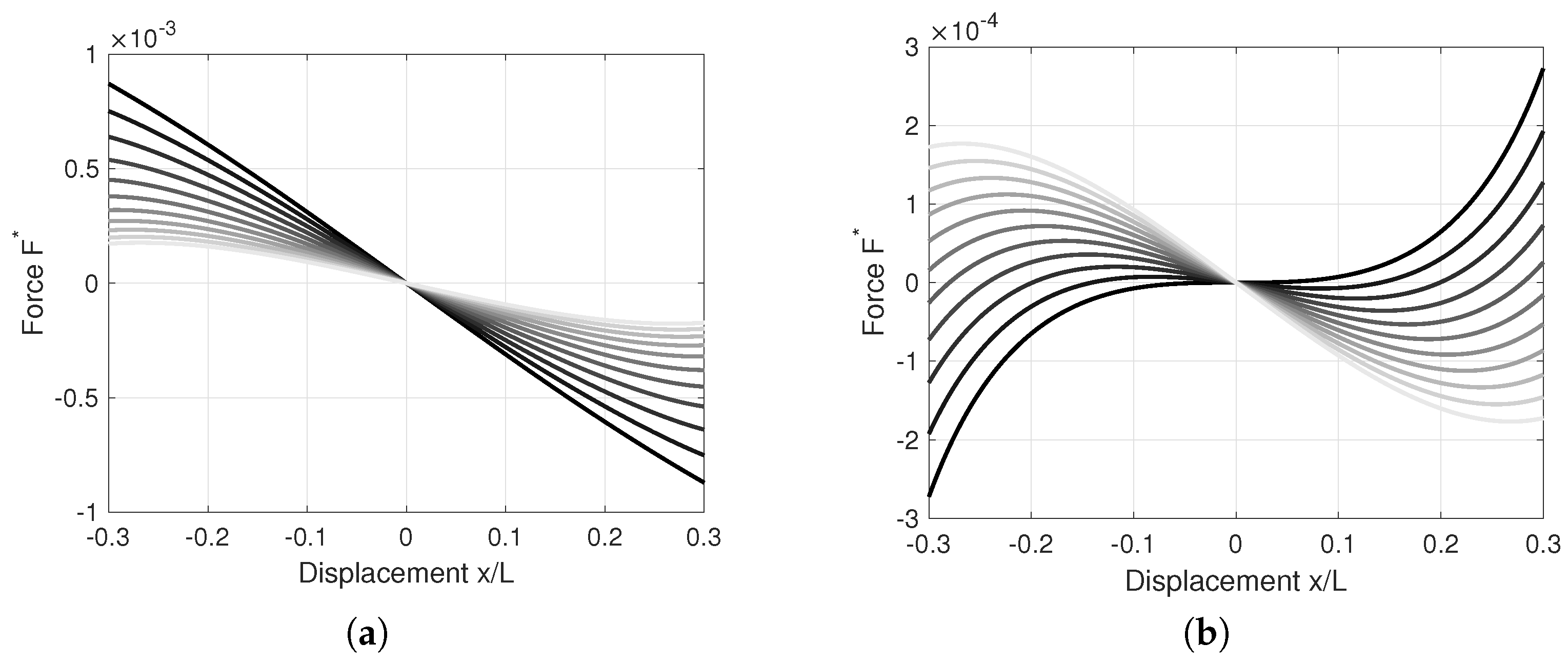
2.2. Qualitative Analysis
2.3. Spring–Mass System Modeling
2.4. Bending Behavior of Beam with Mass and Spring at Midspan
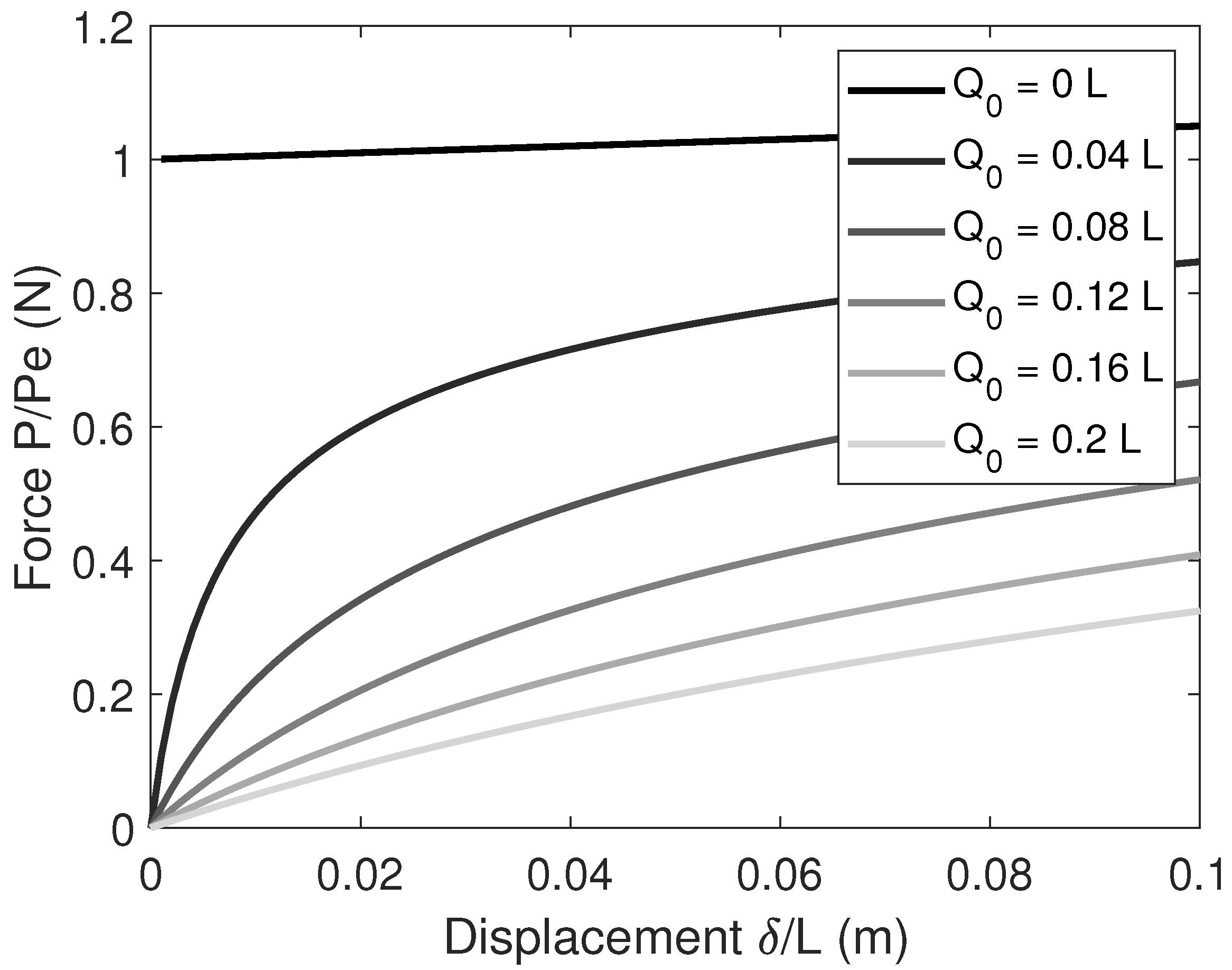
2.5. Introduction of Axial Force in Beams
3. Finite Element Modeling of the Positive and Negative Stiffness Components
3.1. Estimation of Positive Stiffness
3.2. Force–Displacement Relation
3.3. Frequency Domain Computations
3.4. Eigenfrequency Study
4. Experimental Validation
4.1. Measurement Setup
4.2. Response of the Resonator
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Den Hartog, J. Mechanical Vibrations; McGraw-Hill: New York, NY, USA, 1956. [Google Scholar]
- Elias, S.; Matsagar, V. Research developments in vibration control of structures using passive tuned mass dampers. Annu. Rev. Control. 2017, 44, 129–156. [Google Scholar] [CrossRef]
- Molyneux, W. Supports for Vibration Isolation; Technical Report; Royal Aircraft Establishment, Aeronautical Research Council: London, UK, 1956. [Google Scholar]
- Alabuzhev, P. Vibration Protection and Measuring Systems with Quasi-Zero Stiffness; CRC Press: Boca Raton, FL, USA, 1989. [Google Scholar]
- Lee, C.M.; Goverdovskiy, V.N. Vibration Protection Systems: Negative and Quasi-Zero Stiffness; Cambridge University Press: Cambridge, UK, 2021. [Google Scholar]
- Tobias, S.A. Design of Small Isolator Units for the Suppression of Low-Frequency Vibration. J. Mech. Eng. Sci. 1959, 1, 280–292. [Google Scholar] [CrossRef]
- Platus, D.L. Negative-stiffness-mechanism vibration isolation systems. In Proceedings of the Vibration Control in Microelectronics, Optics, and Metrology, San Jose, CA, USA, 4–6 November 1992; SPIE: Bellingham, WA, USA, 1992; Volume 1619, pp. 44–54. [Google Scholar]
- Winterflood, J.; Barber, T.; Blair, D. Using Euler buckling springs for vibration isolation. Class. Quantum Gravity 2002, 19, 1639. [Google Scholar] [CrossRef]
- Hoetmer, K.; Woo, G.; Kim, C.; Herder, J. Negative Stiffness Building Blocks for Statically Balanced Compliant Mechanisms: Design and Testing. J. Mech. Robot. 2010, 2, 041007. [Google Scholar] [CrossRef]
- Yan, W.; Yu, Y.; Mehta, A. Analytical modeling for rapid design of bistable buckled beams. Theor. Appl. Mech. Lett. 2019, 9, 264–272. [Google Scholar] [CrossRef]
- Liu, X.; Huang, X.; Hua, H. On the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negative stiffness corrector. J. Sound Vib. 2013, 332, 3359–3376. [Google Scholar] [CrossRef]
- Huang, X.; Liu, X.; Sun, J.; Zhang, Z.; Hua, H. Vibration isolation characteristics of a nonlinear isolator using Euler buckled beam as negative stiffness corrector: A theoretical and experimental study. J. Sound Vib. 2014, 333, 1132–1148. [Google Scholar] [CrossRef]
- Wu, Q.; Huang, G.; Liu, C.; Xie, S.; Xu, M. Low-frequency multi-mode vibration suppression of a metastructure beam with two-stage high-static-low-dynamic stiffness oscillators. Acta Mech. 2019, 230, 4341–4356. [Google Scholar] [CrossRef]
- Hao, Z.; Cao, Q. The isolation characteristics of an archetypal dynamical model with stable-quasi-zero-stiffness. J. Sound Vib. 2015, 340, 61–79. [Google Scholar] [CrossRef]
- Chen, R.; Li, X.; Yang, Z.; Xu, J.; Yang, H. A variable positive-negative stiffness joint with low frequency vibration isolation performance. Measurement 2021, 185, 110046. [Google Scholar] [CrossRef]
- Lan, C.C.; Yang, S.A.; Wu, Y.S. Design and experiment of a compact quasi-zero-stiffness isolator capable of a wide range of loads. J. Sound Vib. 2014, 333, 4843–4858. [Google Scholar] [CrossRef]
- Lee, C.M.; Goverdovskiy, V.; Temnikov, A. Design of springs with “negative” stiffness to improve vehicle driver vibration isolation. J. Sound Vib. 2007, 302, 865–874. [Google Scholar] [CrossRef]
- Oyelade, A.O. Vibration isolation using a bar and an Euler beam as negative stiffness for vehicle seat comfort. Adv. Mech. Eng. 2019, 11, 1687814019860983. [Google Scholar] [CrossRef]
- Li, H.; Li, Y.; Li, J. Negative stiffness devices for vibration isolation applications: A review. Adv. Struct. Eng. 2020, 23, 1739–1755. [Google Scholar] [CrossRef]
- Tang, B.; Brennan, M. On the shock performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness. Int. J. Mech. Sci. 2014, 81, 207–214. [Google Scholar] [CrossRef]
- Huang, X.; Chen, Y.; Hua, H.; Liu, X.; Zhang, Z. Shock isolation performance of a nonlinear isolator using Euler buckled beam as negative stiffness corrector: Theoretical and experimental study. J. Sound Vib. 2015, 345, 178–196. [Google Scholar] [CrossRef]
- Lakes, R.S.; Lee, T.; Bersie, A.; Wang, Y.C. Extreme damping in composite materials with negative-stiffness inclusions. Nature 2001, 410, 565–567. [Google Scholar] [CrossRef]
- Chronopoulos, D.; Antoniadis, I.; Collet, M.; Ichchou, M. Enhancement of wave damping within metamaterials having embedded negative stiffness inclusions. Wave Motion 2015, 58, 165–179. [Google Scholar] [CrossRef]
- Carrella, A.; Brennan, M.; Waters, T.; Shin, K. On the design of a high-static–low-dynamic stiffness isolator using linear mechanical springs and magnets. J. Sound Vib. 2008, 315, 712–720. [Google Scholar] [CrossRef]
- Wang, M.; Hu, Y.; Sun, Y.; Ding, J.; Pu, H.; Yuan, S.; Zhao, J.; Peng, Y.; Xie, S.; Luo, J. An adjustable low-frequency vibration isolation Stewart platform based on electromagnetic negative stiffness. Int. J. Mech. Sci. 2020, 181, 105714. [Google Scholar] [CrossRef]
- Ibrahim, R. Recent advances in nonlinear passive vibration isolators. J. Sound Vib. 2008, 314, 371–452. [Google Scholar] [CrossRef]
- Chen, S.; Wang, B.; Zhu, S.; Tan, X.; Hu, J.; Lian, X.; Wang, L.; Wu, L. A novel composite negative stiffness structure for recoverable trapping energy. Compos. Part A Appl. Sci. Manuf. 2020, 129, 105697. [Google Scholar] [CrossRef]
- Fan, H.; Yang, L.; Tian, Y.; Wang, Z. Design of metastructures with quasi-zero dynamic stiffness for vibration isolation. Compos. Struct. 2020, 243, 112244. [Google Scholar] [CrossRef]
- Chen, S.; Tan, X.; Hu, J.; Zhu, S.; Wang, B.; Wang, L.; Jin, Y.; Wu, L. A novel gradient negative stiffness honeycomb for recoverable energy absorption. Compos. Part B Eng. 2021, 215, 108745. [Google Scholar] [CrossRef]
- Mehreganian, N.; Fallah, A.S.; Sareh, P. Structural Mechanics of Negative Stiffness Honeycomb Metamaterials. J. Appl. Mech. 2021, 88, 051006. [Google Scholar] [CrossRef]
- Cai, C.; Zhou, J.; Wu, L.; Wang, K.; Xu, D.; Ouyang, H. Design and numerical validation of quasi-zero-stiffness metamaterials for very low-frequency band gaps. Compos. Struct. 2020, 236, 111862. [Google Scholar] [CrossRef]
- Mei, C.; Li, L.; Jiang, Y.; Ye, Y.; Li, X.; Han, X.; Tang, H.; Wang, X.; Hu, Y. On band gap and damping of metamaterials involving negative-stiffness elements. Int. J. Mech. Sci. 2023, 239, 107877. [Google Scholar] [CrossRef]
- Wu, Q.; Droz, C.; Fossat, P.; Ichchou, M.; Xie, S. Negative stiffness mechanisms for the broadening of low frequency bandgaps performance of euler-bernoulli resonators. In Proceedings of the 29th International Conference on Noise and Vibration Engineering, Leuven, Belgium, 7–9 September 2020. [Google Scholar]
- Virgin, L.; Davis, R. Vibration isolation using buckled struts. J. Sound Vib. 2003, 260, 965–973. [Google Scholar] [CrossRef]
- Fulcher, B.A.; Shahan, D.W.; Haberman, M.R.; Conner Seepersad, C.; Wilson, P.S. Analytical and Experimental Investigation of Buckled Beams as Negative Stiffness Elements for Passive Vibration and Shock Isolation Systems. J. Vib. Acoust. 2014, 136, 031009. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimensions (m) | Young’s Modulus (GPa) | Density (kg/m) |
|---|---|---|
| , = 0.004 | 2.5 | 1008 |
| , h = 0.004 |
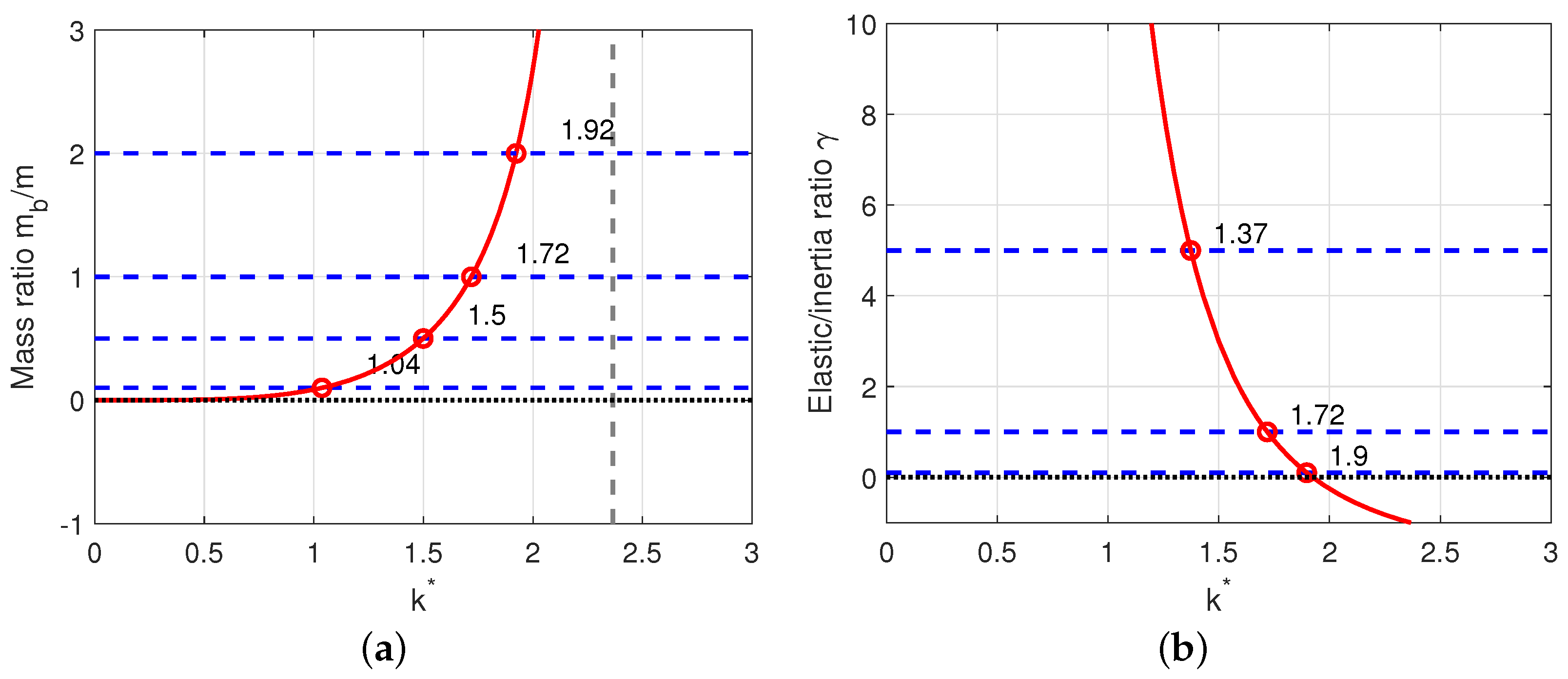
| 2 | 1 | 0.5 | 0.1 | |
|---|---|---|---|---|
| Analytical | 1.92 | 1.72 | 1.50 | 1.04 |
| Finite element | 1.92 | 1.72 | 1.49 | 1.03 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fossat, P.; Kothakota, M.; Ichchou, M.; Bareille, O. Dynamic Bending Model Describing the Generation of Negative Stiffness by Buckled Beams: Qualitative Analysis and Experimental Verification. Appl. Sci. 2023, 13, 9458. https://doi.org/10.3390/app13169458
Fossat P, Kothakota M, Ichchou M, Bareille O. Dynamic Bending Model Describing the Generation of Negative Stiffness by Buckled Beams: Qualitative Analysis and Experimental Verification. Applied Sciences. 2023; 13(16):9458. https://doi.org/10.3390/app13169458
Chicago/Turabian StyleFossat, Pascal, Madhurima Kothakota, Mohamed Ichchou, and Olivier Bareille. 2023. "Dynamic Bending Model Describing the Generation of Negative Stiffness by Buckled Beams: Qualitative Analysis and Experimental Verification" Applied Sciences 13, no. 16: 9458. https://doi.org/10.3390/app13169458
APA StyleFossat, P., Kothakota, M., Ichchou, M., & Bareille, O. (2023). Dynamic Bending Model Describing the Generation of Negative Stiffness by Buckled Beams: Qualitative Analysis and Experimental Verification. Applied Sciences, 13(16), 9458. https://doi.org/10.3390/app13169458