

Development of Simplified Seedling Transplanting Device for Supporting Efficient Production of Vegetable Raw Materials




Abstract
:Featured Application
Abstract
1. Introduction
2. Materials and Methods
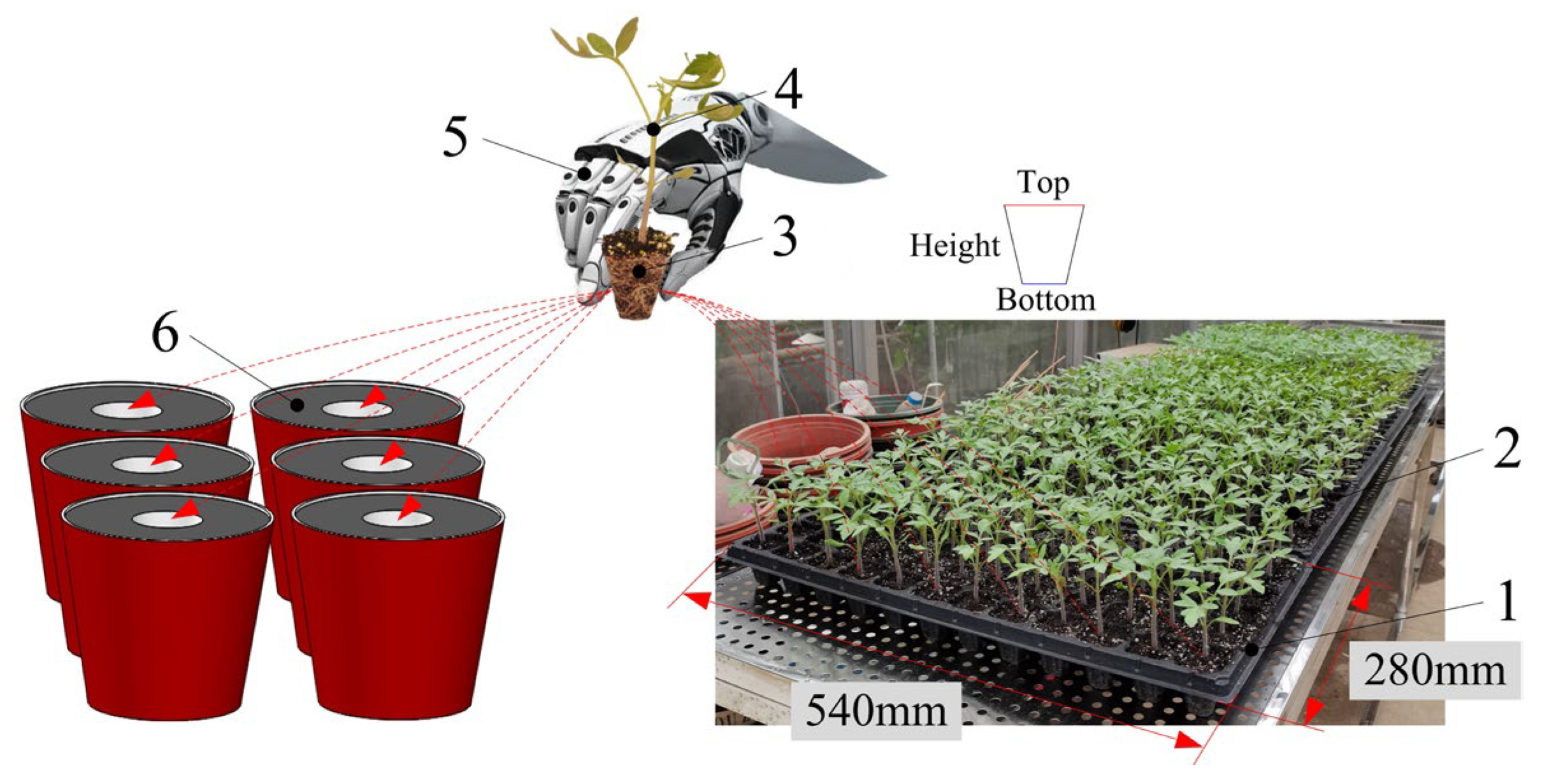
2.1. Design Conditions
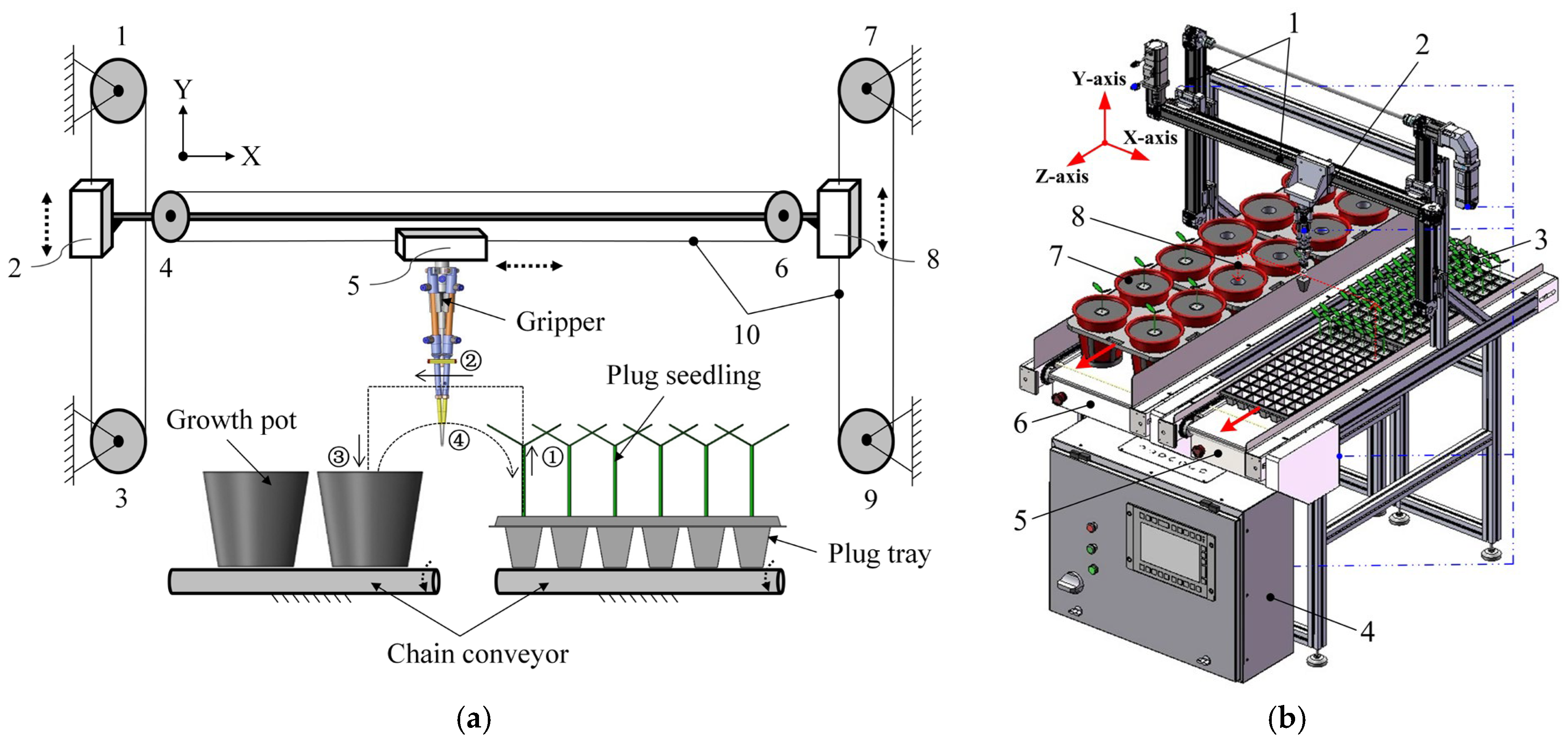
2.2. Innovative Design of Transplanting Mechanism
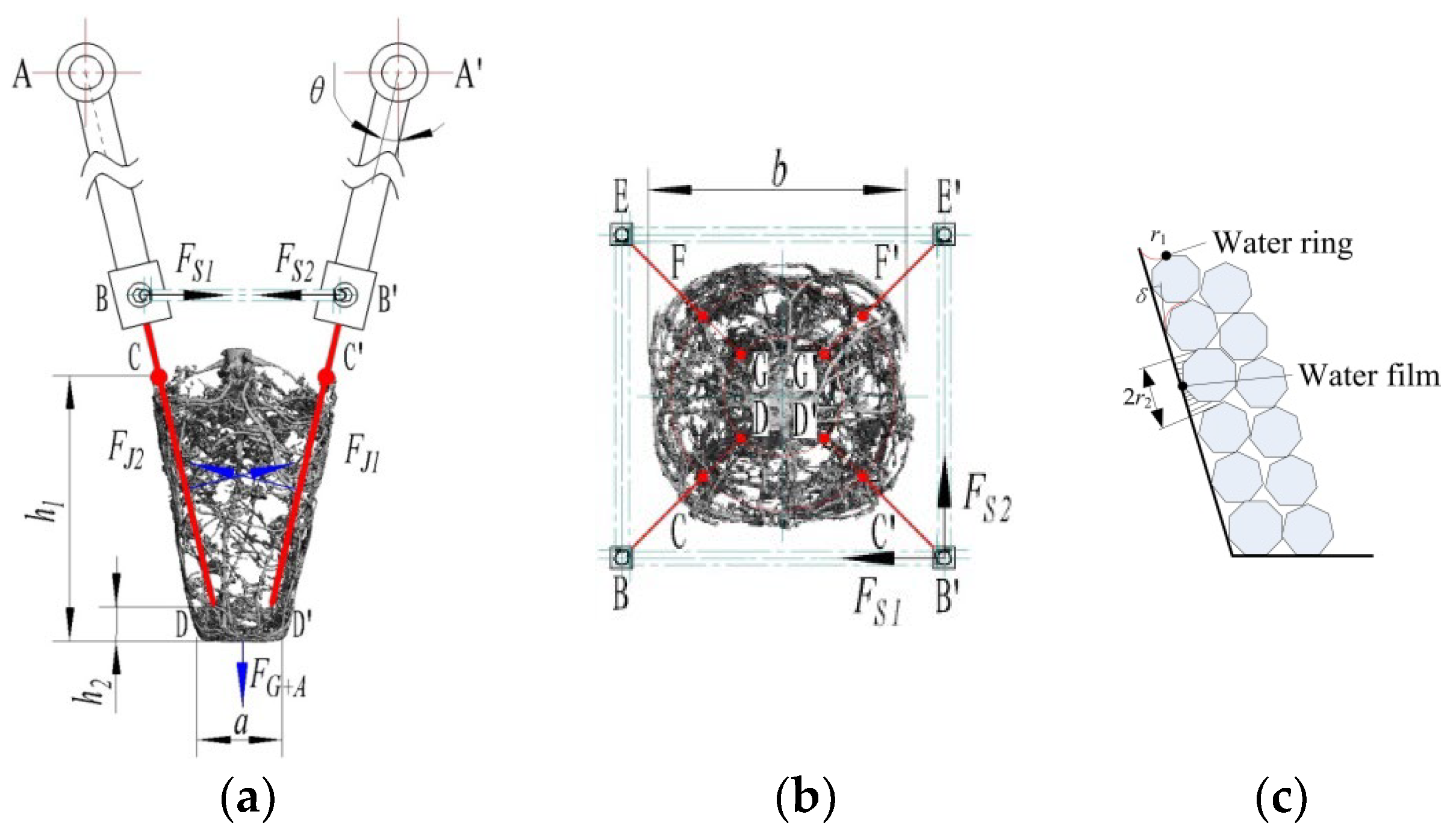
2.2.1. Seedling Gripper
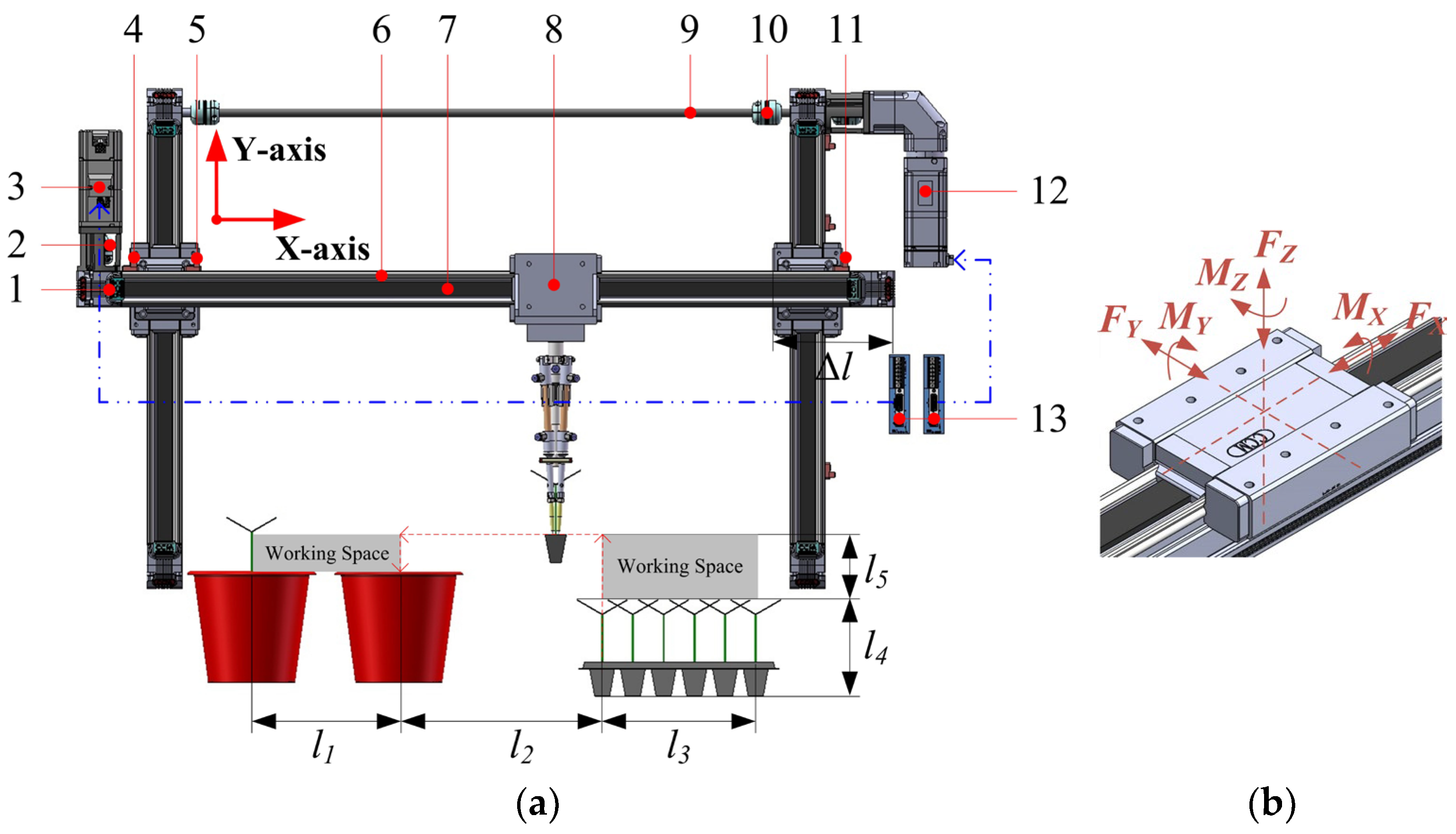
2.2.2. Transplanting Manipulator
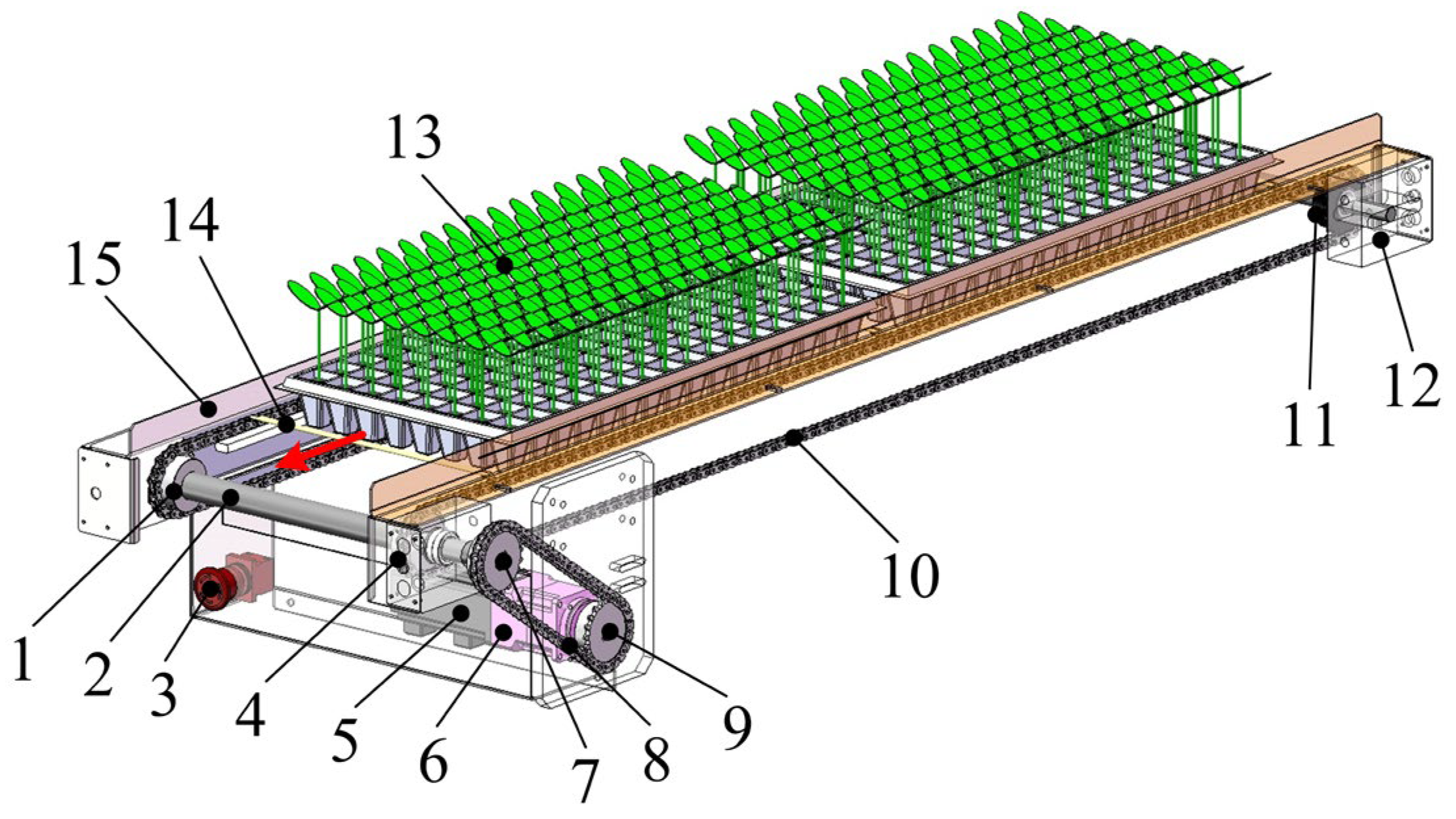
2.2.3. Parallel Conveyor
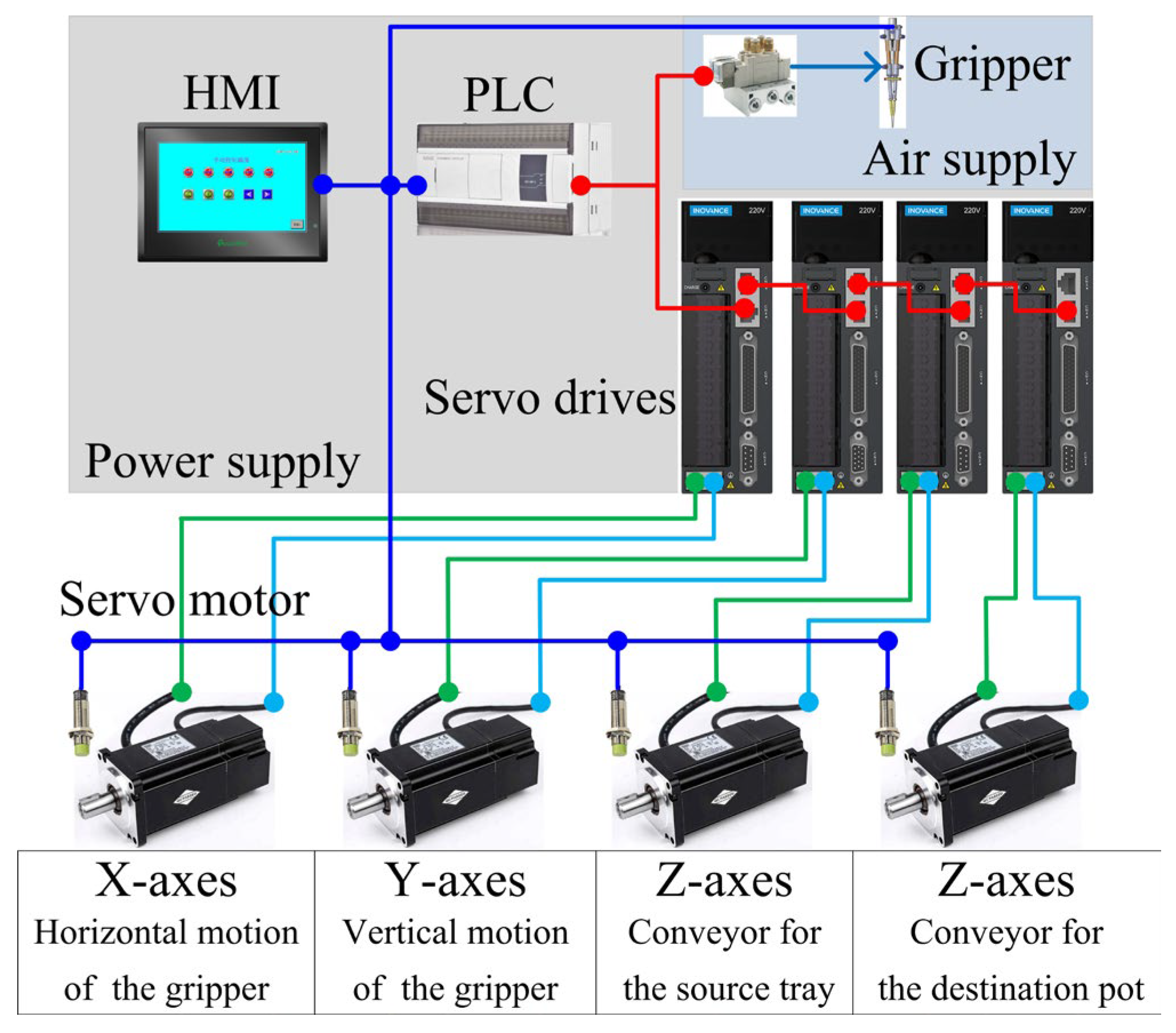
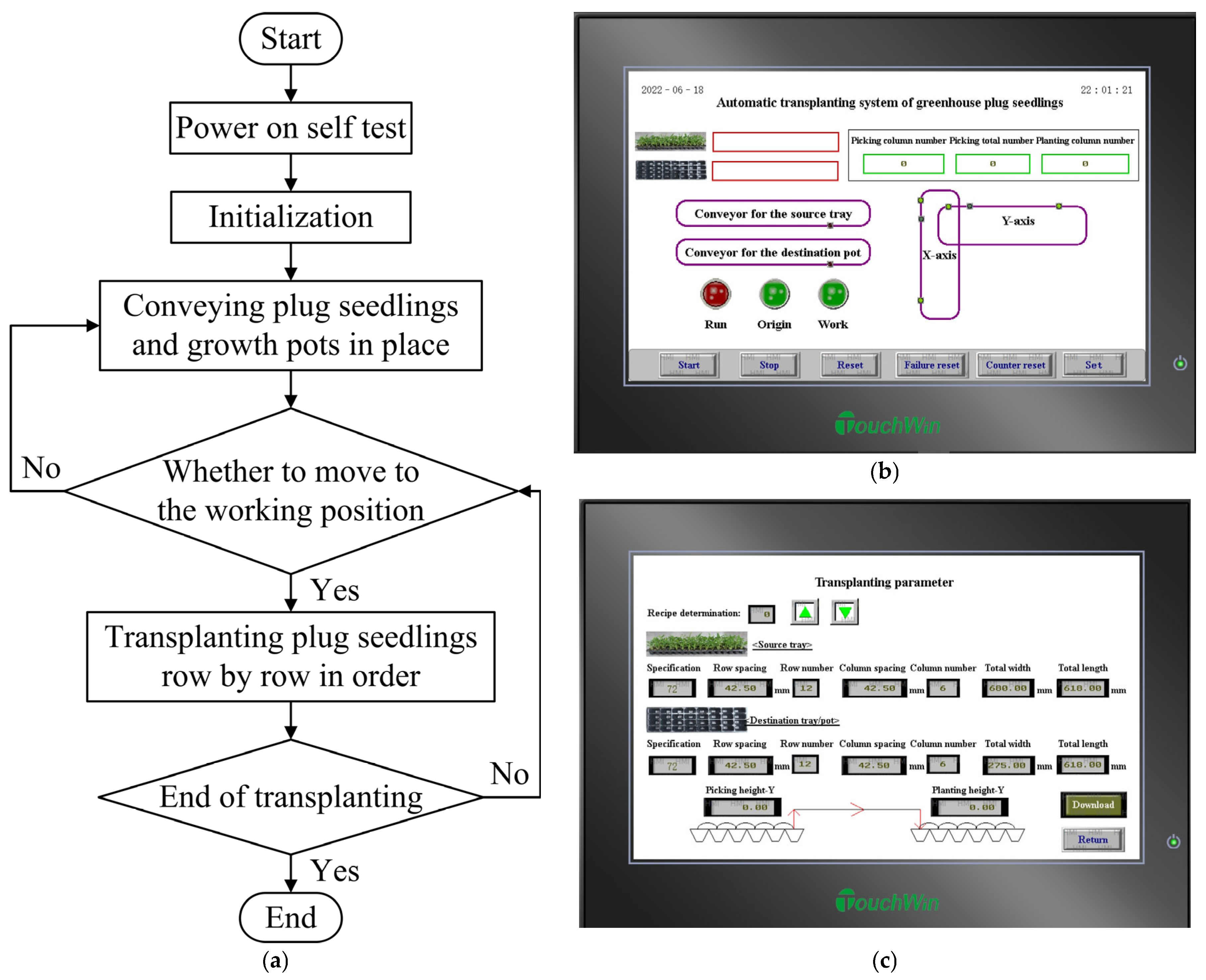
2.3. Development of Control System
2.4. Construction of Physical Prototype
2.5. Experiment of Multi-Factor Optimization
2.6. Experiment of Transplanting Performance
3. Results
3.1. Multi-Factor Optimization Experiment
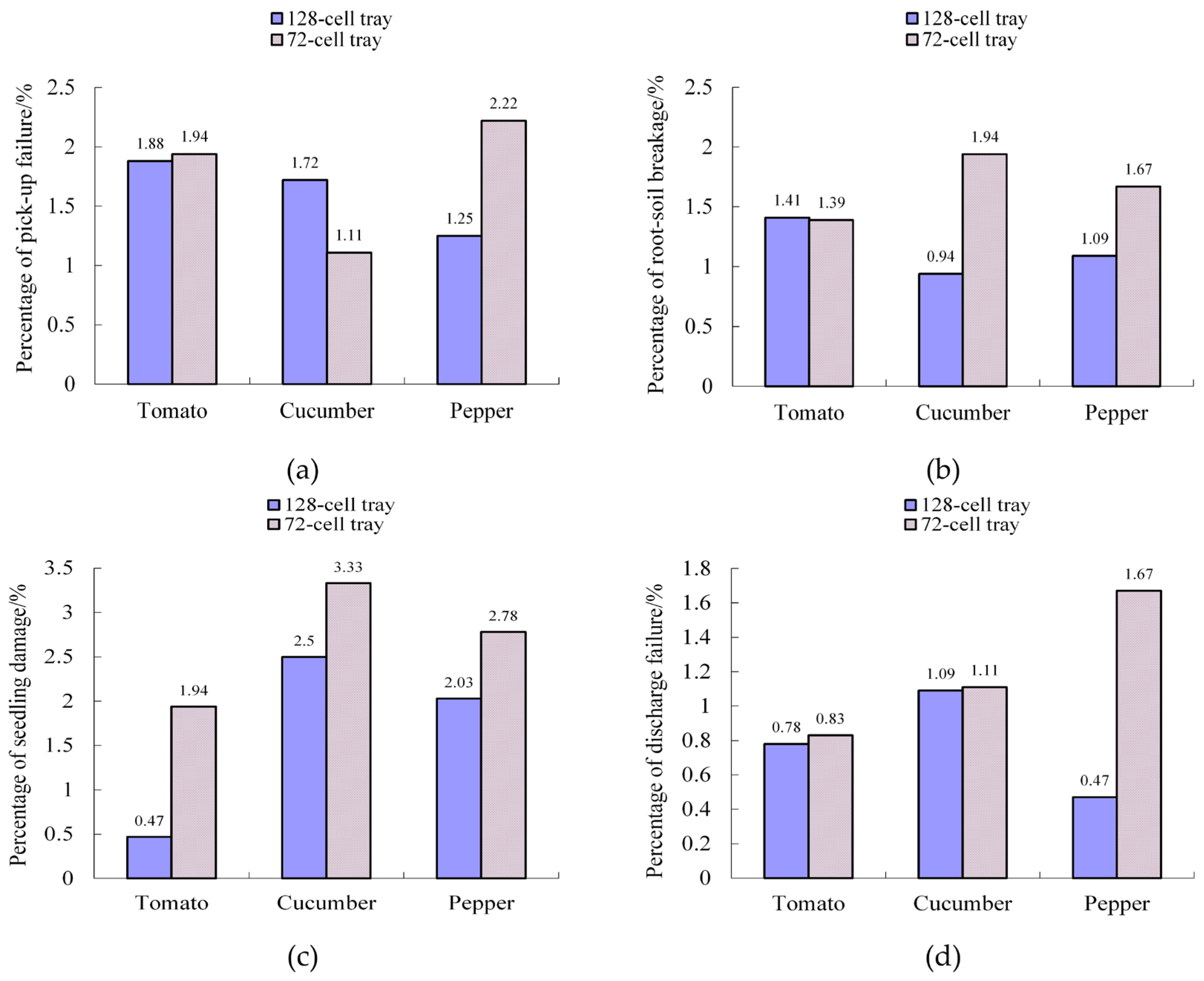
3.2. Transplanting Performance Experiment
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, S.; Sun, Y.; Liu, Z.; Hu, X.; Yi, J. Research progress on the flavor profile and flavor formation of fermented vegetables in China. J. Chin. Inst. Food Sci. Tech. 2022, 22, 373–378. [Google Scholar] [CrossRef]
- Cui, W.; Wang, Y.; Gong, Z.; Wang, Y.; Jia, F.; Wang, W. The industry situation, research progress at home and abroad and the development of pickles. Food Ind. 2017, 38, 238–241. [Google Scholar]
- Finger, J.A.F.F.; Santos, I.M.; Silva, G.A.; Bernardino, M.C.; Pinto, U.M.; Maffei, D.F. Minimally processed vegetables in brazil: An overview of marketing, processing, and microbiological Aspects. Foods 2023, 12, 2259. [Google Scholar] [CrossRef] [PubMed]
- Ma, R.; Qin, W.; Wu, X. Optimal roller speed of drum-type dehydrated vegetable drier. Food Sci. 2012, 31, 94–96. [Google Scholar]
- Gu, S.; Yang, Y.; Zhang, Y.; Qiao, X. Development status of automated equipment systems for greenhouse vegetable seedlings production in Netherlands and its inspiration for China. Trans. CSAE 2013, 29, 185–194. [Google Scholar] [CrossRef]
- Sun, X.; Wu, Z.; Feng, Y.; Shi, X.; Li, P.; Shang, Q. Research progress on vegetables seedling culture technique during ‘The Thirteenth Five-Year Plan’ in China. China Vege 2021, 8, 18–26. [Google Scholar] [CrossRef]
- Ryu, K.H.; Kim, G.; Han, J.S. AE-automation and emerging technologies: Development of a robotic transplanter for bedding plants. J. Agric. Eng. Res. 2002, 78, 141–146. [Google Scholar] [CrossRef]
- Mao, H.; Han, L.; Hu, J.; Kumi, F. Development of a pincette-type pick-up device for automatic transplanting of greenhouse seedlings. Appl. Eng. Agric. 2014, 30, 547–556. [Google Scholar] [CrossRef]
- Kumar, G.P.; Raheman, H. Vegetable transplanters for use in developing countries-a review. Int. J. Vege Sci. 2008, 14, 232–255. [Google Scholar] [CrossRef]
- Khadatkar, A.; Mathur, S.M.; Gaikwad, B.B. Automation in transplanting: A smart way of vegetable cultivation. Curr. Sci. 2018, 115, 1884–1892. [Google Scholar] [CrossRef]
- Belforte, G.; Deboli, R.; Gay, P.; Piccarolo, P.; Aimonino, D.R. Robot design and testing for greenhouse applications. Biosyst. Eng. 2006, 95, 309–321. [Google Scholar] [CrossRef]
- Feng, Q.; Zhao, C.; Jiang, K.; Fan, P.; Wang, X. Design and test of tray-seedling sorting transplanter. Int. J. Agric. Biol. Eng. 2015, 8, 14–20. [Google Scholar] [CrossRef]
- Ting, K.C.; Giacomelli, G.A.; Ling, P.P. Workability and productivity of robotic plug transplanting workcell. Vitr. Cell. Dev. Biol. Plant 1992, 28, 5–10. [Google Scholar] [CrossRef]
- Choi, W.C.; Kim, D.C.; Ryu, I.H.; Kim, K.U. Development of a seedling pick-up device for vegetable transplanters. Trans. ASAE 2002, 45, 13–19. [Google Scholar] [CrossRef]
- Hůla, P.; Šindelář, R.; Trinkl, A. Verification of applicability of ABB robots for transplanting seedlings in greenhouses. Res. Agric. Eng. 2008, 54, 155–162. [Google Scholar] [CrossRef]
- Kang, T.G.; Kim, S.W.; Kim, Y.K.; Lee, S.H.; Jun, H.J.; Choi, I.S.; Yang, E.Y.; Jang, K.S.; Kim, H.G. Analysis of pick-up mechanism for automatic transplanter (I). J. Agric. Life Sci. 2017, 51, 187–192. [Google Scholar] [CrossRef]
- Kutz, L.J.; Miles, G.E.; Hammer, P.A.; Krutz, G.W. Robotic transplanting of bedding plants. Trans. ASAE 1987, 30, 586–590. [Google Scholar] [CrossRef]
- Yang, Y.; Ting, K.C.; Giacomelli, G.A. Factors affecting performance of sliding-needles gripper during robotic transplanting of seedlings. Appl. Eng. Agric. 1991, 7, 493–498. [Google Scholar] [CrossRef]
- Qi, F.; Wei, X.; Zhang, Y. Development status and future research emphase on greenhouse horticultural equipment and its relative technology in China. Trans. CSAM 2017, 33, 1–9. [Google Scholar] [CrossRef]
- Lu, Y.; Lee, H.; Chen, Y.; Ching, C. The development of adjustable transplanting mechanism for plug seedlings. J. Agric. Mach. 2003, 12, 11–24. [Google Scholar]
- Tian, S.; Qiu, L. Design on plug seedling automatic transplanter in greenhouse. Adv. Mater. Res. 2011, 317, 586–589. [Google Scholar] [CrossRef]
- Zhao, X.; Cheng, D.; Dong, W.; Ma, X.; Xiong, Y.; Tong, J. Research on the end effector and optimal motion control strategy for a plug seedling transplanting parallel robot. Agriculture 2022, 12, 1661. [Google Scholar] [CrossRef]
- Zhang, L.; Tan, Y.; Lyu, H.; Li, B.; Jiang, Y.; Wang, S. Optimization of automatic transplanting path for plug seedlings in greenhouse. Trans. CSAE 2020, 36, 65–72. [Google Scholar] [CrossRef]
- Tian, Z.; Ma, W.; Yang, Q.; Yao, S.; Guo, X.; Duan, F. Design and experiment of gripper for greenhouse plug seedling transplanting based on EDM. Agronomy 2022, 12, 1487. [Google Scholar] [CrossRef]
- Li, F.; Lei, J.; Wang, W.; Song, B. Optimal design and experimental verification of a four-claw seedling pick-up mechanism using the hybrid PSO-SA algorithm. Span. J. Agric. Res. 2022, 20, e0207. [Google Scholar] [CrossRef]
- Tong, J.; Shi, H.; Wu, C.; Jiang, H.; Yang, T. Skewness correction and quality evaluation of plug seedling images based on canny operator and hough transform. Comput. Electron. Agric. 2018, 155, 461–472. [Google Scholar] [CrossRef]
- Ting, K.C.; Giacomelli, G.A.; Shen, S.J.; Kabala, W.P. Robot workcell for transplanting of seedlings part II—End-effector development. Am. Soc. Agric. Eng. 1990, 33, 1013–1017. [Google Scholar] [CrossRef]
- Feng, S.; Yan, B.; Quan, W.; Wu, M. Mechanical analysis of seedling detaching from movable tray and influence factors of adhesion. Trans. CSAE 2019, 35, 21–28. [Google Scholar] [CrossRef]
- Mao, H.; Liu, Y.; Han, L.; Sheng, B.; Ma, G.; Li, Y. X-ray computerized tomography for characterization of pick-up destruction and pick-up parameter optimization of tomato root lumps. Span. J. Agric. Res. 2019, 17, e0202. [Google Scholar] [CrossRef]
- NY/T 2119-2012; General Rule for Vegetable Plug Transplant Production. Ministry of Agriculture of the PRC: Beijing, China, 2012. Available online: https://www.doc88.com/p-9992985721834.html (accessed on 3 September 2023).
- Han, L.; Mo, M.; Gao, Y.; Ma, H.; Xiang, D.; Ma, G.; Mao, H. Effects of new compounds into substrates on seedling qualities for efficient transplanting. Agronomy 2022, 12, 983. [Google Scholar] [CrossRef]
- Shaw, L.N. Changes needed to facilitate automatic field transplanting. HortTech 1993, 3, 418–420. [Google Scholar] [CrossRef]
- Lim, J.; Park, S.; Chae, W.; Kim, S.; Choi, S.; Yang, E.; Lee, M.; Park, G.; Jang, Y.; Seo, M.; et al. Seedling conditions for kimchi cabbage, head lettuce, cabbage and broccoli for a riding type transplanter. J. Biosyst. Eng. 2017, 42, 104–111. [Google Scholar] [CrossRef]
- Parish, R.L. Current developments in seeders and planters for vegetable crops. HortTech 2005, 15, 541–546. [Google Scholar] [CrossRef]
- Zhang, N.; Zhang, G.; Liu, H.; Liu, W.; Wei, J.; Tang, N. Design of and experiment on open-and-close seedling pick-up manipulator with four fingers. Agriculture 2022, 12, 1776. [Google Scholar] [CrossRef]
- Ren, L.; Wang, N.; Cao, W.; Li, J.; Ye, X. Trajectory planning and motion control of full-row seedling pick-up arm. Int. J. Agric. Biol. Eng. 2020, 13, 41–51. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | FG+A (N) | FS1 (N) | ||||
|---|---|---|---|---|---|---|
| Minimum Value | Maximum Value | Mean Value | Standard Deviation | θ (128-Cell) | θ (72-Cell) | |
| 1 | 1.80 | 2.75 | 2.19 | 0.24 | 0.62 | 0.87 |
| 2 | 1.55 | 2.68 | 2.21 | 0.32 | 0.63 | 0.88 |
| 3 | 1.67 | 2.82 | 2.03 | 0.28 | 0.57 | 0.81 |
| Factors (Levels) | A: Transplanting Frequency (plant/min) | B: Grasping Force (N) | C: Penetration Depth (mm) |
|---|---|---|---|
| 1 | 15 | 0.9 | 30 |
| 2 | 20 | 1.2 | 35 |
| 3 | 25 | 1.5 | 40 |
| Tray | Seedling | Seedling Age (day) | No. of Leaves | Seedling Height (mm) | Leaf Length (mm) | Leaf Width (mm) |
|---|---|---|---|---|---|---|
| 128 | Tomato | 32 | 4~5 | 115.20 ± 5.75 | 39.15 ± 6.94 | 24.18 ± 4.53 |
| Cucumber | 20 | 2~3 | 75.26 ± 6.15 | 42.23 ± 4.18 | 23.96 ± 5.86 | |
| Pepper | 47 | 5~6 | 174.58 ± 9.25 | 34.19 ± 5.87 | 23.26 ± 4.14 | |
| 72 | Tomato | 41 | 5~6 | 131.65 ± 5.28 | 39.43 ± 4.67 | 24.09 ± 4.63 |
| Cucumber | 31 | 3~4 | 87.46 ± 6.15 | 62.54 ± 6.43 | 35.68 ± 6.44 | |
| Pepper | 54 | 6~7 | 182.17 ± 6.41 | 37.19 ± 5.75 | 28.62 ± 4.17 |
| Test Number | Factor (Level) | Integrity Rate (%) | |||
|---|---|---|---|---|---|
| A (3) | B (3) | C (3) | Da (3) | ||
| 1 | 1 (15 plant/min) | 1 (0.9 N) | 1 (30 mm) | 1 | 90.79 |
| 2 | 1 | 2 (1.2 N) | 2 (35 mm) | 2 | 93.63 |
| 3 | 1 | 3 (1.5 N) | 3 (40 mm) | 3 | 92.11 |
| 4 | 2 (20 plant/min) | 1 | 2 | 3 | 90.57 |
| 5 | 2 | 2 | 3 | 1 | 90.24 |
| 6 | 2 | 3 | 1 | 2 | 88.36 |
| 7 | 3 (25 plant/min) | 1 | 3 | 2 | 88.75 |
| 8 | 3 | 2 | 1 | 3 | 88.46 |
| 9 | 3 | 3 | 2 | 1 | 89.21 |
| K1 | 92.18 | 90.04 | 89.20 | ||
| K2 | 89.72 | 90.78 | 91.14 | ||
| K3 | 88.81 | 89.89 | 90.37 | ||
| R | 3.37 | 0.88 | 1.93 | ||
| Optimal level | A1 | B2 | C2 | ||
| Source | Sum | DOF | Mean Square | F-Value | p-Value | Significance |
|---|---|---|---|---|---|---|
| A: Transplanting frequency | 18.216 | 2 | 9.1080 | 134.3805 | 0.0074 | ** |
| B: Grasping force | 1.3484 | 2 | 0.6742 | 9.9474 | 0.0913 | ns |
| C: Penetration depth | 5.6840 | 2 | 2.8420 | 41.9313 | 0.0233 | * |
| D: Error * | 0.1356 | 2 | 0.0678 | |||
| Sum | 25.384 |
| Plug Tray | Seedling | No. of Seedlings Fed | No. of Pick-Up Failures | No. of Soil Lump Breakage | No. of Seedling Damages | No. of Discharge Failure | Success Ratio % |
|---|---|---|---|---|---|---|---|
| 128-cell | Tomato | 640 | 12 | 9 | 3 | 5 | 95.47 |
| Cucumber | 640 | 11 | 6 | 16 | 7 | 93.75 | |
| Pepper | 640 | 8 | 7 | 13 | 3 | 95.16 | |
| 72-cell | Tomato | 360 | 7 | 5 | 7 | 3 | 93.89 |
| Cucumber | 360 | 4 | 7 | 12 | 4 | 92.50 | |
| Pepper | 360 | 8 | 6 | 10 | 6 | 91.67 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, L.; Xiang, D.; Xu, Q.; Du, X.; Ma, G.; Mao, H. Development of Simplified Seedling Transplanting Device for Supporting Efficient Production of Vegetable Raw Materials. Appl. Sci. 2023, 13, 10022. https://doi.org/10.3390/app131810022
Han L, Xiang D, Xu Q, Du X, Ma G, Mao H. Development of Simplified Seedling Transplanting Device for Supporting Efficient Production of Vegetable Raw Materials. Applied Sciences. 2023; 13(18):10022. https://doi.org/10.3390/app131810022
Chicago/Turabian StyleHan, Luhua, Daqian Xiang, Qianqian Xu, Xuewu Du, Guoxin Ma, and Hanping Mao. 2023. "Development of Simplified Seedling Transplanting Device for Supporting Efficient Production of Vegetable Raw Materials" Applied Sciences 13, no. 18: 10022. https://doi.org/10.3390/app131810022
APA StyleHan, L., Xiang, D., Xu, Q., Du, X., Ma, G., & Mao, H. (2023). Development of Simplified Seedling Transplanting Device for Supporting Efficient Production of Vegetable Raw Materials. Applied Sciences, 13(18), 10022. https://doi.org/10.3390/app131810022