
An Improved Advanced Driver-Assistance System: Model-Free Prescribed Performance Adaptive Cruise Control

Abstract
:1. Introduction
2. Preliminaries and Problem Formulation
2.1. Vehicle Dynamics
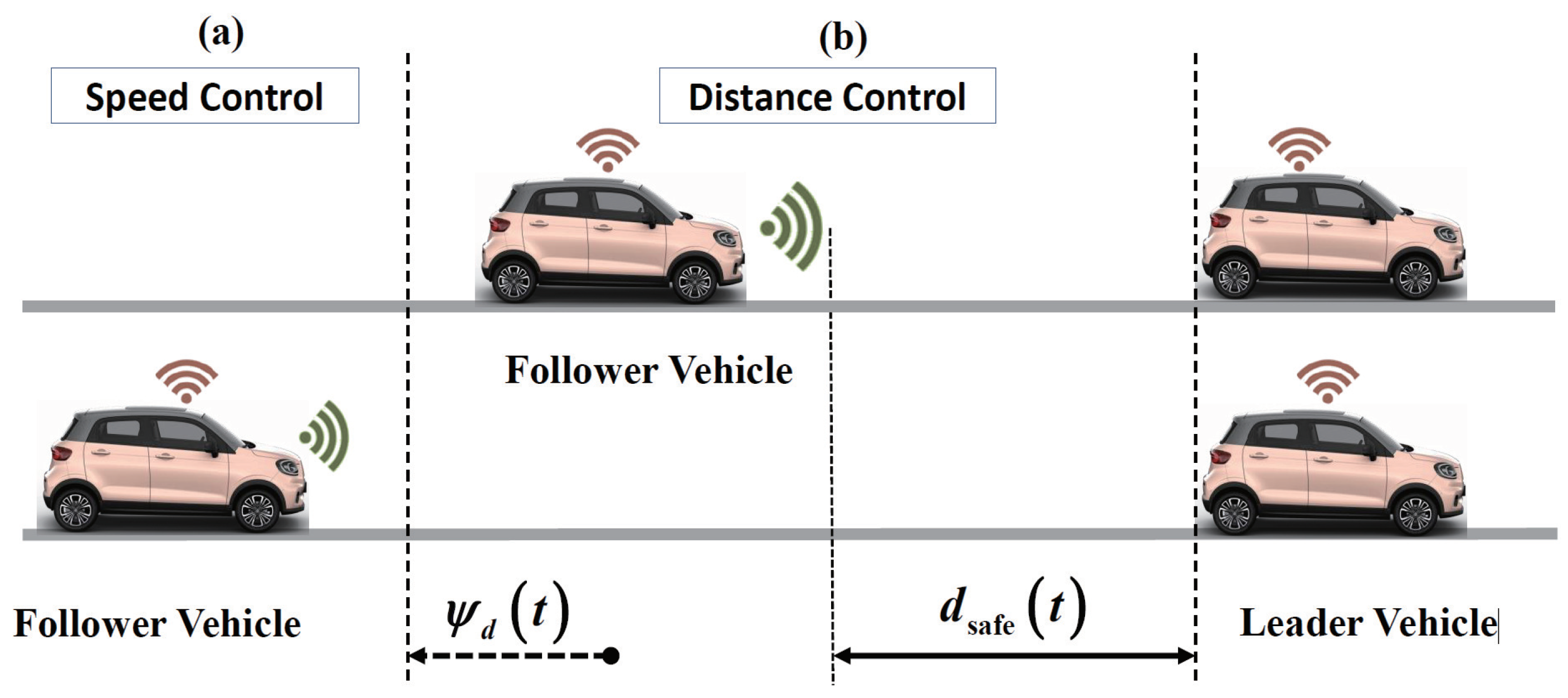
2.2. Adaptive Cruise Control Objective
- ;
- On the basis of satisfying the first objective, should be as small as possible.
3. Main Results
3.1. Model-Free Speed-Prescribed Performance Control Design
3.2. Model-Free Distance-Prescribed Performance Control Design
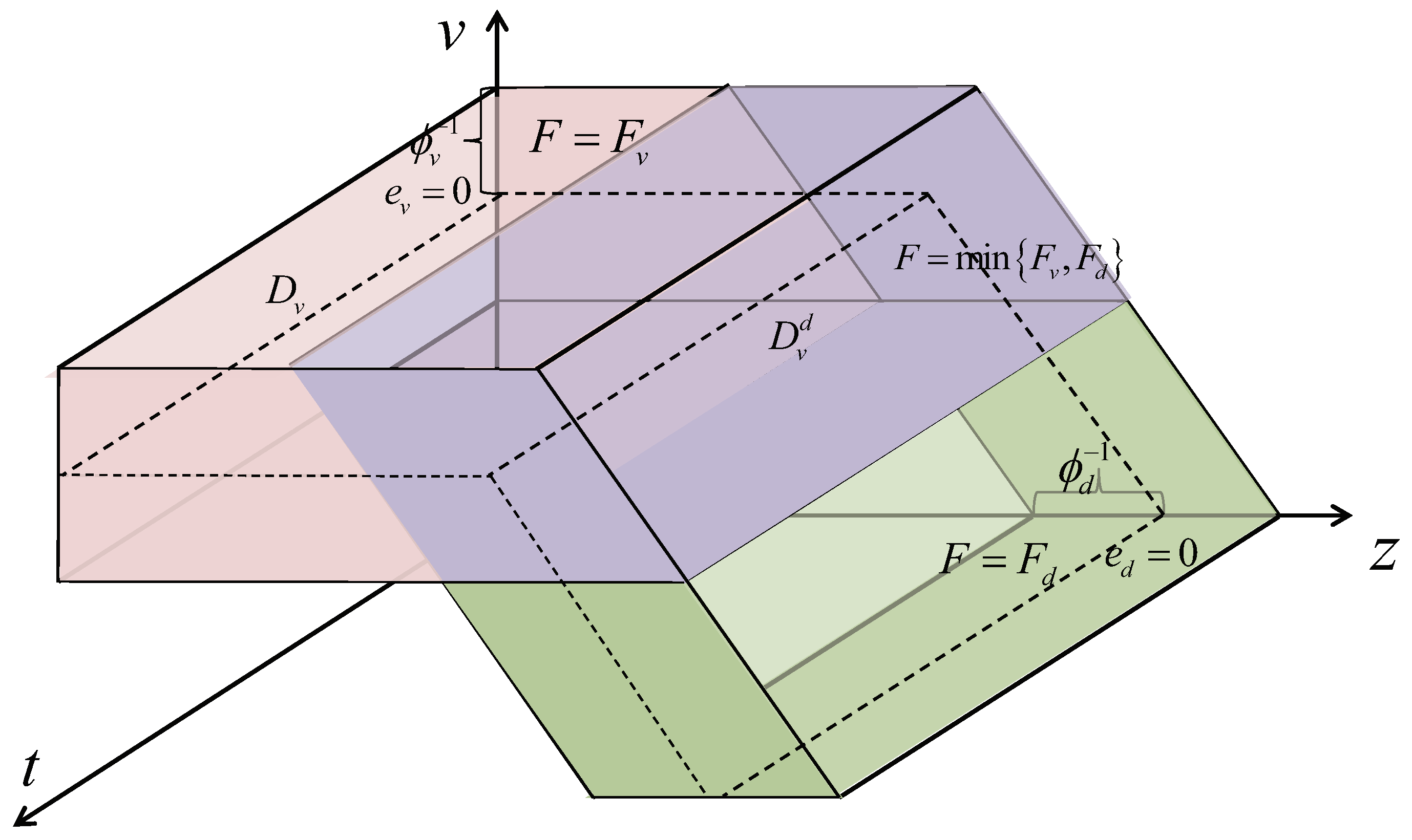
3.3. Integrated Algorithm Design for Vehicle Speed and Distance Control
- When the vehicle enters the safe-distance error constraint range, i.e., , the speed-prescribed performance control should automatically switch to distance-prescribed performance control;
- When distance-prescribed performance control is in effect, try to ensure . If (leader deceleration), it should not switch back to the speed-prescribed performance control.
3.4. Algorithm Feasibility and Stability Analysis
- The speed and control input are bounded;
- There exists , for all , if the following conditions are satisfied.
- is bounded on . Assuming that the velocity is unbounded on , due to being bounded and being continuous and bounded, there exists such that . This contradicts . By using the same method, it can be proven that the speed is bounded on .
- is bounded. Due to and , we can conclude that . Define , and we have . Furthermore, .
- If and , there is ; then, .
- If and , there is ; then, .
- If and , there exists and such that and ; then, , . Furthermore,Therefore, we have .
- If and , there exists . When , we have . Thus, we have or .
4. Simulations and Discussion
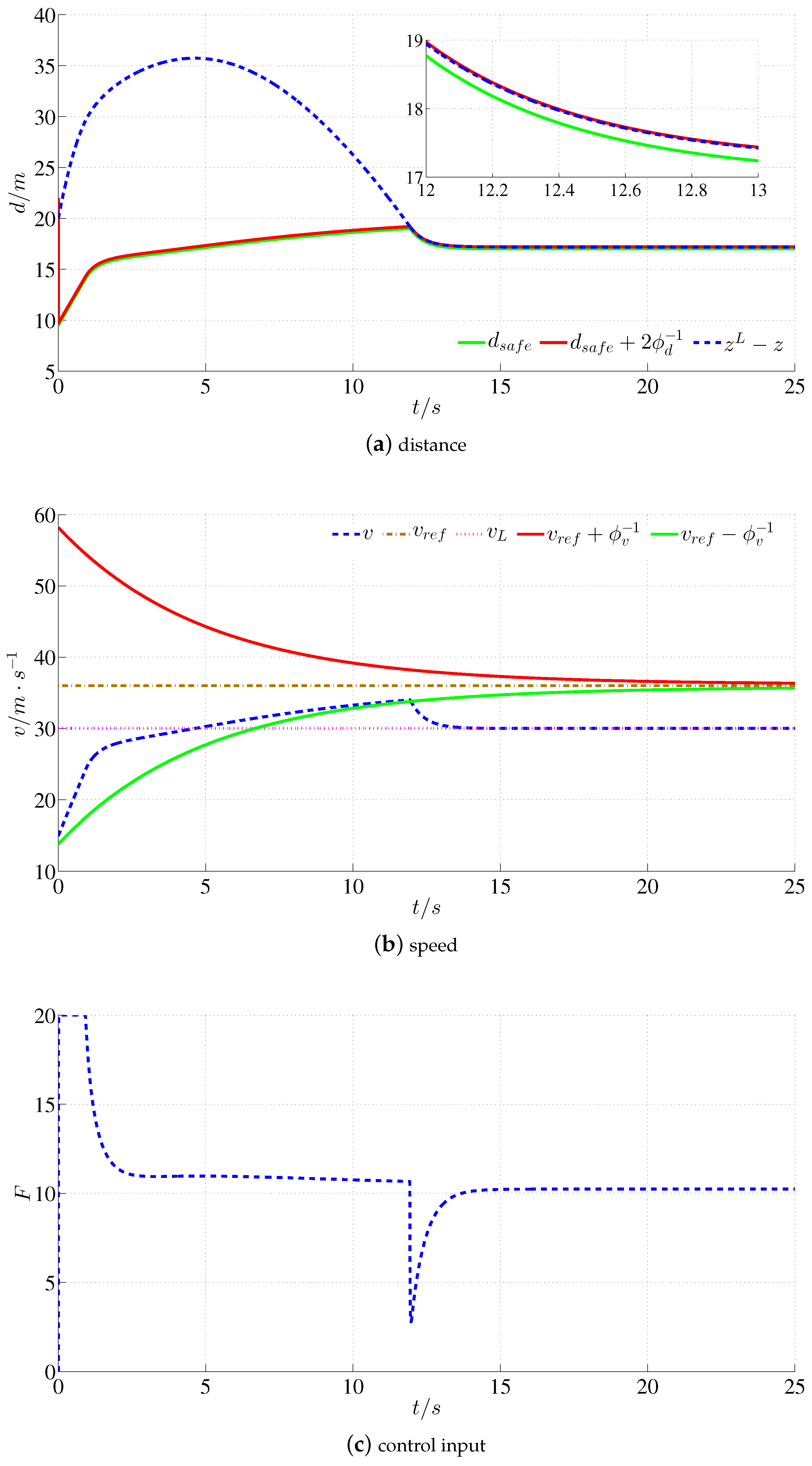
4.1. Scenario 1: Approaching the Leader Car and Following the Leader
4.2. Scenario 2: Rapid Deceleration of Leader Vehicle
4.3. Scenario 3: Frequent Start and Stop of Leader Vehicle
4.4. Comparative Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, L.; Wu, G.; Guo, X. Vehicular multi-objective adaptive cruise control algorithm. J. Xi’An Jiaotong Univ. 2016, 50, 136–143. [Google Scholar]
- Zhang, Y.; Song, J. Model-free robust backstepping adaptive cruise control. Int. J. Aerosp. Eng. 2023, 2023, 8839650. [Google Scholar] [CrossRef]
- Pin, Q.P.; Kang, P.S.; Lei, H.X.; Min, W.F.; Qian, W. Influence of different vehicle operating conditions on driving safety of CACC platoon. J. Transp. Syst. Eng. Inf. Technol. 2019, 19, 33–42. [Google Scholar]
- Hua, X.; Yang, J.W.W. Redesign and experimental evaluation of cooperative adaptive cruise control system. J. Transp. Syst. Eng. Inf. Technol. 2019, 19, 52–60. [Google Scholar]
- Karafyllis, I.; Theodosis, D.; Papageorgiou, M. Lyapunov-based two-dimensional cruise control of autonomous vehicles on lane-free roads. Automatica 2022, 145, 110517. [Google Scholar] [CrossRef]
- Theodosis, D.; Karafyllis, I.; Papageorgiou, M. Cruise controllers for lane-free ring-roads based on control Lyapunov functions. J. Frankl. Inst. 2023, 360, 6131–6161. [Google Scholar] [CrossRef]
- Ahmad, E.; Iqbal, J.; Arshad Khan, M.; Liang, W.; Youn, I. Predictive control using active aerodynamic surfaces to improve ride quality of a vehicle. Electronics 2020, 9, 1463. [Google Scholar] [CrossRef]
- Hailemichael, H.; Ayalew, B.; Kerbel, L.; Ivanco, A.; Loiselle, K. Safety filtering for reinforcement learning-based adaptive cruise control. IFAC-PapersOnLine 2022, 55, 149–154. [Google Scholar] [CrossRef]
- Shakouri, P.; Ordys, A. Nonlinear model predictive control approach in design of adaptive cruise control with automated switching to cruise control. Control Eng. Pract. 2014, 26, 160–177. [Google Scholar] [CrossRef]
- Zhang, H.; Liang, J.; Zhang, Z. Active fault tolerant control of adaptive cruise control system considering vehicle-borne millimeter wave radar sensor failure. IEEE Access 2020, 8, 11228–11240. [Google Scholar] [CrossRef]
- Song, J.; Yan, M.; Ju, Y.; Yang, P. Nonlinear gain feedback adaptive DSC for a class of uncertain nonlinear systems with asymptotic output tracking. Nonlinear Dyn. 2019, 98, 2195–2210. [Google Scholar] [CrossRef]
- Lin, Y.-C.; Nguyen, H.-L.T.; Wang, C.-H. Adaptive neuro-fuzzy predictive control for design of adaptive cruise control system. In Proceedings of the 2017 IEEE 14th International Conference on Networking, Sensing and Control (ICNSC), Calabria, Italy, 16–18 May 2017; pp. 767–772. [Google Scholar]
- Flores, C.; Milanés, V. Fractional-order-based ACC/CACC algorithm for improving string stability. Transp. Res. Part C Emerg. Technol. 2018, 95, 381–393. [Google Scholar] [CrossRef]
- Li, X.; Zeng, C.; Luo, J.; Hu, J.; Wang, X. Research on adaptive cruise control algorithm based on linear quadratic optimal control. J. Wuhan Univ. Technol. Inf. Manag. Eng. 2019, 41, 81–86. [Google Scholar]
- Wang, P.; Deng, H.; Zhang, J.; Wang, L.; Zhang, M.; Li, Y. Model predictive control for connected vehicle platoon under switching communication topology. IEEE Trans. Intell. Transp. Syst. 2021, 23, 7817–7830. [Google Scholar] [CrossRef]
- Ganji, B.; Kouzani, A.Z.; Khoo, S.Y.; Shams-Zahraei, M. Adaptive cruise control of a HEV using sliding mode control. Expert Syst. Appl. 2014, 41, 607–615. [Google Scholar] [CrossRef]
- Milanés, V.; Villagrá, J.; Godoy, J.; González, C. Comparing fuzzy and intelligent PI controllers in stop-and-go manoeuvres. IEEE Trans. Control Syst. Technol. 2011, 20, 770–778. [Google Scholar] [CrossRef]
- Lidström, K.; Sjöberg, K.; Holmberg, U.; Andersson, J.; Bergh, F.; Bjäde, M.; Mak, S. A modular CACC system integration and design. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1050–1061. [Google Scholar] [CrossRef]
- Weißmann, A.; Görges, D.; Lin, X. Energy-optimal adaptive cruise control combining model predictive control and dynamic programming. Control Eng. Pract. 2018, 72, 125–137. [Google Scholar] [CrossRef]
- Li, S.E.; Jia, Z.; Li, K.; Cheng, B. Fast online computation of a model predictive controller and its application to fuel economy-oriented adaptive cruise control. IEEE Trans. Intell. Transp. Syst. 2014, 16, 1199–1209. [Google Scholar] [CrossRef]
- Bageshwar, V.L.; Garrard, W.L.; Rajamani, R. Model predictive control of transitional maneuvers for adaptive cruise control vehicles. IEEE Trans. Veh. Technol. 2004, 53, 1573–1585. [Google Scholar] [CrossRef]
- Li, S.; Li, K.; Rajamani, R.; Wang, J. Model predictive multi-objective vehicular adaptive cruise control. IEEE Trans. Control Syst. Technol. 2010, 19, 556–566. [Google Scholar] [CrossRef]
- Magdici, S.; Althoff, M. Adaptive cruise control with safety guarantees for autonomous vehicles. IFAC-PapersOnLine 2017, 50, 5774–5781. [Google Scholar] [CrossRef]
- Song, J.-c.; Ju, Y.-f. Distributed adaptive sliding mode control for vehicle platoon with uncertain driving resistance and actuator saturation. Complexity 2020, 2020, 7581517. [Google Scholar] [CrossRef]
- Berger, T.; Lê, H.H.; Reis, T. Funnel control for nonlinear systems with known strict relative degree. Automatica 2018, 87, 345–357. [Google Scholar] [CrossRef]
- Cheng, S.; Li, L.; Mei, M.-m.; Nie, Y.-l.; Zhao, L. Multiple-objective adaptive cruise control system integrated with DYC. IEEE Trans. Veh. Technol. 2019, 68, 4550–4559. [Google Scholar] [CrossRef]
- Yoon, S.; Jeon, H.; Kum, D. Predictive cruise control using radial basis function network-based vehicle motion prediction and chance constrained model predictive control. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3832–3843. [Google Scholar] [CrossRef]
- Berger, T.; Rauert, A.L. Funnel cruise control. Automatica 2020, 119, 109061. [Google Scholar] [CrossRef]
- Song, J.; Yan, M.Y.P. Robust backstepping adaptive cruise control based on data-driven. J. Zhejiang Univ. Eng. Sci. 2022, 56, 3485–3493. [Google Scholar]
- Luo, L.; Gong, L.L.P. Two-mode adaptive cruise control design with humans’ driving habits consideration. J. Zhejiang Univ. Eng. Sci. 2011, 45, 2073–2078. [Google Scholar]
- Guo, X.G.; Wang, J.L.; Liao, F.; Teo, R.S.H. Distributed adaptive control for vehicular platoon with unknown dead-zone inputs and velocity/acceleration disturbances. Int. J. Robust Nonlinear Control 2017, 27, 2961–2981. [Google Scholar] [CrossRef]
- Berger, T. Funnel Control of the Fokker–Planck Equation for a MultiDimensional Ornstein–Uhlenbeck Process. SIAM J. Control Optim. 2021, 59, 3203–3230. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| m/kg | 1300 | /(kg/m3) | 1.3 | Cr | 0.01 |
| A/m2 | 2.4 | 2 | Cd | 0.32 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ju, P.; Song, J. An Improved Advanced Driver-Assistance System: Model-Free Prescribed Performance Adaptive Cruise Control. Appl. Sci. 2023, 13, 11499. https://doi.org/10.3390/app132011499
Ju P, Song J. An Improved Advanced Driver-Assistance System: Model-Free Prescribed Performance Adaptive Cruise Control. Applied Sciences. 2023; 13(20):11499. https://doi.org/10.3390/app132011499
Chicago/Turabian StyleJu, Peilun, and Jiacheng Song. 2023. "An Improved Advanced Driver-Assistance System: Model-Free Prescribed Performance Adaptive Cruise Control" Applied Sciences 13, no. 20: 11499. https://doi.org/10.3390/app132011499
APA StyleJu, P., & Song, J. (2023). An Improved Advanced Driver-Assistance System: Model-Free Prescribed Performance Adaptive Cruise Control. Applied Sciences, 13(20), 11499. https://doi.org/10.3390/app132011499