
LIF-M: A Manifold-Based Approach for 3D Robot Localization in Unstructured Environments

Abstract
:1. Introduction
- Introduction of a manifold-based filtering approach for localization (LIF-M) that is suitable for multi-sensor fusion scenarios while being adaptable to unstructured environments.
- Transformation of the three-dimensional sigma points of the state estimation into the manifold space while applying left and right multiplication methods at different stages of the algorithm to achieve improved localization results.
- Design of a global auxiliary localization system to ensure algorithm stability.
2. Theory
2.1. Lie Group
2.2. Definition of Error
2.3. Uncertainty of State
3. System and Sensor Models
3.1. Definition of System State and Relevant Concepts
3.2. Definition of IMU Model
3.3. Definition of Point Cloud Model
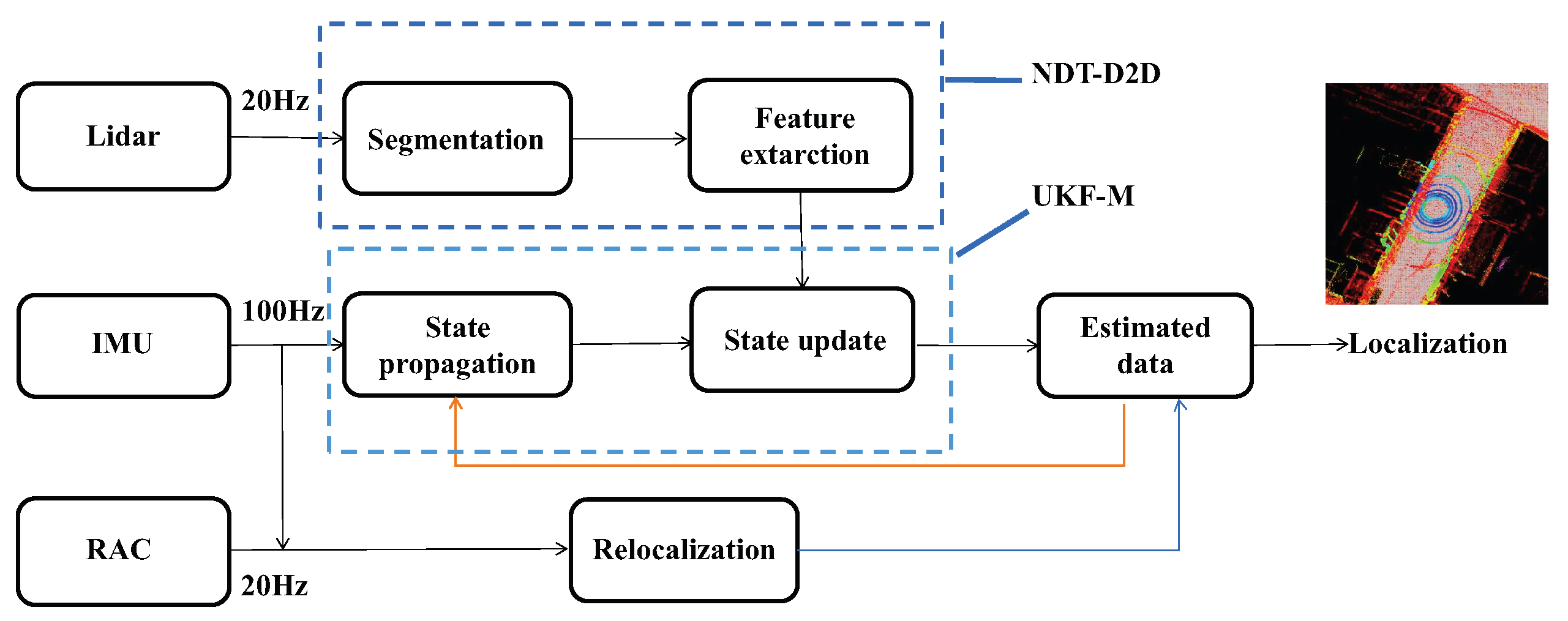
4. Multi-Sensor Data Fusion Framework
4.1. Definition of the Framework
4.2. Left-Invariant Measurements
4.3. Manifold-Based Unscented Kalman Filter
4.3.1. System Prediction
4.3.2. System Updating
4.3.3. Design of Point Cloud Distortion Correction and Relocalization
| Algorithm 1: Adaptive Relocalization Algorithm. |
 |
5. Experimental Design and Results
5.1. Experimental Environment and Setup
5.2. Experimental Results
5.2.1. NDT-CUDA
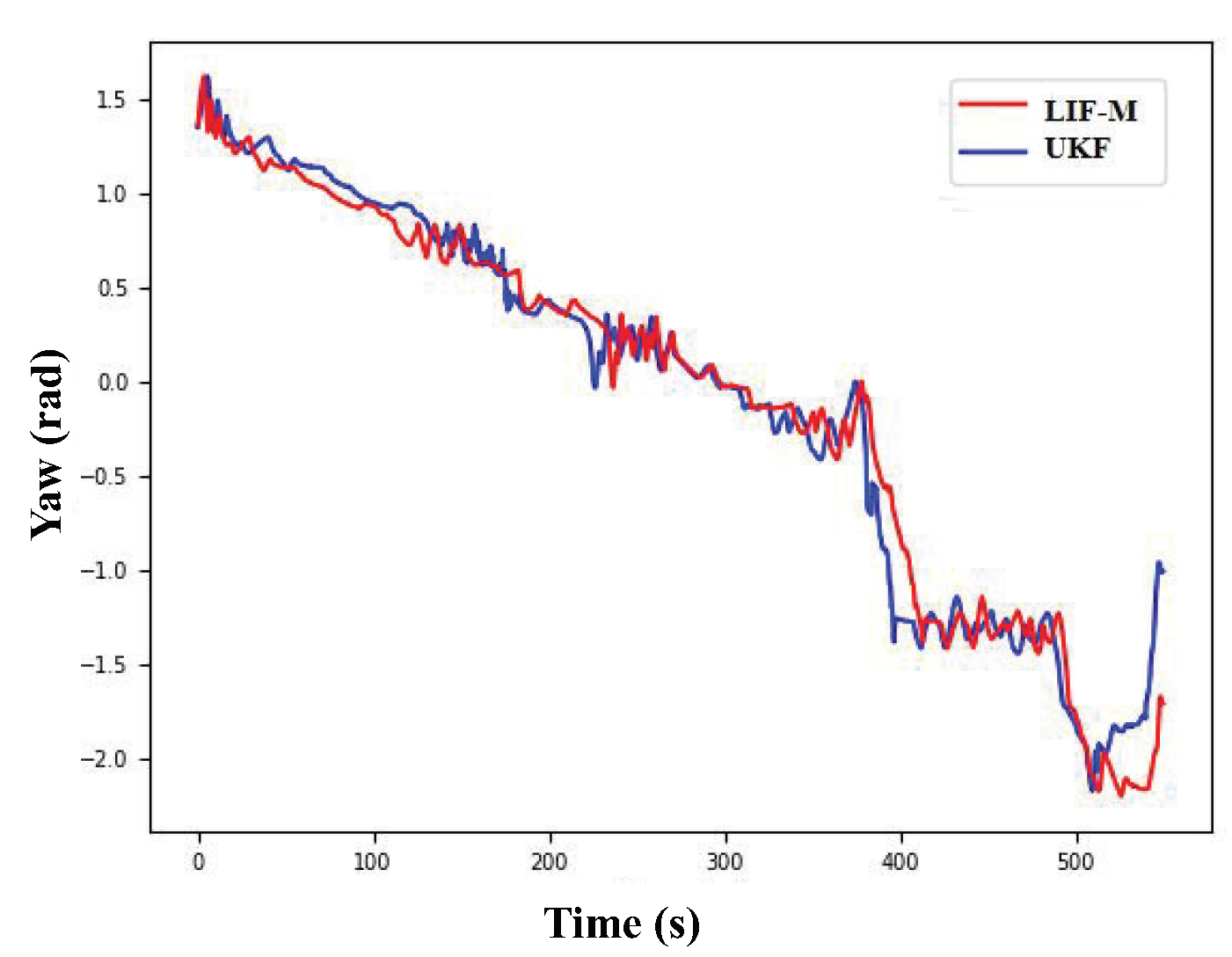
5.2.2. Trajectory Comparison Results
5.2.3. Stability Experiment Analysis
5.3. Discussion of the Issues
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Batra, V.; Jadon, C.; Kumar, V. A Cognitive Framework on Object Recognition and Localization for Robotic Vision. In Proceedings of the 2020 Indo—Taiwan 2nd International Conference on Computing, Analytics and Networks (Indo-Taiwan ICAN), Rajpura, India, 7–15 February 2020; pp. 125–131. [Google Scholar] [CrossRef]
- Dong, H.; Weng, C.-Y.; Guo, C.; Yu, H.; Chen, I.-M. Real-Time Avoidance Strategy of Dynamic Obstacles via Half Model-Free Detection and Tracking with 2D Lidar for Mobile Robots. IEEE/ASME Trans. Mechatron. 2021, 26, 2215–2225. [Google Scholar] [CrossRef]
- Tang, X.; Yang, Q.; Xiong, D.; Xie, Y.; Wang, H.; Li, R. Improving Multiscale Object Detection with Off-Centered Semantics Refinement. IEEE Trans. Circuits Syst. Video Technol. 2022, 32, 6888–6899. [Google Scholar] [CrossRef]
- Ruilan, G.; Zeyu, W.; Sitong, G.; Changjian, J.; Yu, Z. LFVB-BioSLAM: A Bionic SLAM System with a Light-Weight LiDAR Front End and a Bio-Inspired Visual Back End. Biomimetics 2023, 8, 410. [Google Scholar]
- Huang, Y.H.; Lin, C.T. Indoor Localization Method for a Mobile Robot Using LiDAR and a Dual AprilTag. Electronics 2023, 12, 1023. [Google Scholar] [CrossRef]
- Huang, J.H.; Junginger, S.; Liu, H.; Thurow, K. Correcting of Unexpected Localization Measurement for Indoor Automatic Mobile Robot Transportation Based on neural network. Transp. Saf. Environ. 2023. [Google Scholar] [CrossRef]
- Sitompul, G.H.; Fikri, M.R.; Hadisujoto, I.B. Autonomous mobile robot localization using Markov decision algorithm. AIP Conf. Proc. 2023, 2646, 050023. [Google Scholar]
- Xianjia, Y.; Qingqing, L.; Queralta, J.P.; Heikkonen, J.; Westerlund, T.; Rus, D. Cooperative UWB-Based Localization for Outdoors Positioning and Navigation of UAVs aided by Ground Robots. In Proceedings of the 2021 IEEE International Conference on Autonomous Systems (ICAS), Montreal, QC, Canada, 11–13 August 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Xu, Y.; Shmaliy, Y.S.; Chen, X.; Zhuang, Y. Extended Kalman/UFIR Filters for UWB-Based Indoor Robot Localization under Time-Varying Colored Measurement Noise. IEEE Internet Things J. 2023, 10, 15632–15641. [Google Scholar] [CrossRef]
- Frosi, M.; Bertoglio, R.; Matteucci, M. On the precision of 6 DoF IMU-LiDAR based localization in GNSS-denied scenarios. Front. Robot. AI 2023, 10, 1064930. [Google Scholar] [CrossRef] [PubMed]
- Wu, M.-H.; Yu, J.-C.; Lin, Y.-C. Study of Autonomous Robotic Lawn Mower Using Multi-Sensor Fusion Based Simultaneous Localization and Mapping. In Proceedings of the 2022 International Conference on Advanced Robotics and Intelligent Systems (ARIS), Taipei, Taiwan, 24–27 August 2022; pp. 1–4. [Google Scholar]
- Ning, H.; Fenghua, H.; Yi, H.; Yu, Y. Graph-based observability analysis for mutual localization in multi-robot systems. Syst. Control Lett. 2022, 161, 105152. [Google Scholar]
- Lv, Z.; Chen, T.; Cai, Z.; Chen, Z. Machine Learning-Based Garbage Detection and 3D Spatial Localization for Intelligent Robotic Grasp. Appl. Sci. 2023, 13, 10018. [Google Scholar] [CrossRef]
- Lequn, C.; Englot, B.; Xiling, Y.; Chaolin, T.; Jinlong, S.; Nicholas, P.; Youxiang, C.; Kui, L.; Seung, L. Multisensor fusion-based digital twin for localized quality prediction in robotic laser-directed energy deposition. Robot. Comput.-Integr. Manuf. 2023, 84, 102581. [Google Scholar]
- Shan, T.; Englot, B.; Meyers, D.; Wang, W.; Ratti, C.; Rus, D. LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 5135–5142. [Google Scholar]
- Ji, Z.; Sanjiv, S. LOAM: Lidar Odometry and Mapping in Real-time. Robot. Sci. Syst. 2014, 2, 1–9. [Google Scholar] [CrossRef]
- Shan, T.; Englot, B. LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4758–4765. [Google Scholar]
- Qin, C.; Ye, H.; Pranata, C.E.; Han, J.; Zhang, S.; Liu, M. LINS: A Lidar-Inertial State Estimator for Robust and Efficient Navigation. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 8899–8906. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Wu, K.; Zhang, T.; Su, D.; Huang, S.; Dissanayake, G. An invariant-EKF VINS algorithm for improving consistency. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1578–1585. [Google Scholar]
- Diemer, S.; Bonnabel, S. An invariant Linear Quadratic Gaussian controller for a simplified car. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 448–453. [Google Scholar]
- Barfoot, T.D.; Furgale, P.T. Associating Uncertainty with Three-Dimensional Poses for Use in Estimation Problems. IEEE Trans. Robot. 2014, 30, 679–693. [Google Scholar] [CrossRef]
- Tsao, S.H.; Jan, S.S. Observability analysis and consistency improvements for visual-inertial odometry on the matrix lie group of extended poses. IEEE Sens. J. 2020, 21, 8341–8353. [Google Scholar] [CrossRef]
- Liu, H.; Yue, Y.; Liu, C. Automatic recognition and localization of underground pipelines in GPR B-scans using a deep learning model. Tunn. Undergr. Space Technol. 2023, 134, 104861. [Google Scholar] [CrossRef]
- Zheng, S.; Liu, Y.; Weng, W.; Jia, X.; Yu, S.; Wu, Z. Tomato Recognition and Localization Method Based on Improved YOLOv5n-seg Model and Binocular Stereo Vision. Agronomy 2023, 13, 2339. [Google Scholar] [CrossRef]
- Brossard, M.; Bonnabel, S.; Condomines, J.-P. Unscented Kalman filtering on Lie groups. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 2485–2491. [Google Scholar]
- Brossard, M.; Barrau, A.; Bonnabel, S. A Code for Unscented Kalman Filtering on Manifolds (UKF-M). In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 5701–5708. [Google Scholar]
- Forster, C.; Carlone, L.; Dellaert, F.; Scaramuzza, D. On-Manifold Preintegration for Real-Time Visual–Inertial Odometry. IEEE Trans. Robot. 2017, 33, 1–21. [Google Scholar] [CrossRef]
- Barrau, A.; Bonnabel, S. Intrinsic Filtering on Lie Groups with Applications to Attitude Estimation. IEEE Trans. Autom. Control 2015, 60, 436–449. [Google Scholar] [CrossRef]
- Yin, J.; Li, A.; Li, T. M2dgr: A multi-sensor and multi-scenario slam dataset for ground robots. IEEE Robot. Autom. Lett. 2021, 7, 2266–2273. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approaches | Dsmp (Map/m) | Dsmp (Lidar/m) | Search Method | CPU/% | Mem/Gb | Drift |
|---|---|---|---|---|---|---|
| NDT-P2D-CUDA | 0.1 | 0.2 | DIRECT7 | 114 | 1.28 | No |
| 0.2 | 0.1 | DIRECT7 | 87 | 0.88 | No | |
| 0.2 | 0.2 | DIRECT7 | 103 | 0.88 | Yes | |
| 0.1 | 0.1 | DIRECT7 | 100 | 1.78 | No | |
| NDT-D2D-CUDA | 0.1 | 0.2 | DIRECT7 | 92 | 1.28 | No |
| 0.2 | 0.1 | DIRECT7 | 79 | 0.88 | No | |
| 0.2 | 0.2 | DIRECT7 | 105 | 1.08 | No | |
| 0.1 | 0.1 | DIRECT7 | 95 | 0.88 | No | |
| NDT-OMP-CPU | 0.1 | 0.2 | DIRECT1 | 290.4 | 1.52 | Yes |
| 0.2 | 0.1 | DIRECT1 | 217 | 0.87 | Yes | |
| 0.2 | 0.2 | DIRECT1 | 279.2 | 0.93 | Yes | |
| 0.1 | 0.1 | DIRECT1 | 290.4 | 1.52 | Yes |
| UKF | LIO-SAM | LINS | LIF-M | |
|---|---|---|---|---|
| Error/m | 0.55 | 0.92 | 0.75 | 0.47 |
| Number | Point Position | Max Error/m |
|---|---|---|
| 1 | [−95.4, 19.2] | 0.042 |
| 2 | [−71.2, 39.4] | 0.051 |
| 3 | [0.0, −5.39] | 0.055 |
| 4 | [−10.2, −28.7] | 0.031 |
| 5 | [83.2, −39.3] | 0.033 |
| 6 | [59.7, −59.5] | 0.024 |
| Number | Path | Max Error/m |
|---|---|---|
| 1 | [−95.2, −31.1] −> [43.2, −101.2] | 0.0243 |
| 2 | [−115.1, −28.5] −> [53.2, −105.4] | 0.01687 |
| 3 | [84.1, −52.3] −> [67.3, 101.3] | 0.00532 |
| 4 | [2.35, 1.92] −> [−27.3, −56.2] | 0.0482 |
| 5 | [−59.3, 52.3] −> [79.79, −38.2] | 0.0651 |
| 6 | [−78.7, 50.24] −> [−114.5, −25.1] | 0.0091 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Liu, Y.; Li, Q. LIF-M: A Manifold-Based Approach for 3D Robot Localization in Unstructured Environments. Appl. Sci. 2023, 13, 11643. https://doi.org/10.3390/app132111643
Zhang S, Liu Y, Li Q. LIF-M: A Manifold-Based Approach for 3D Robot Localization in Unstructured Environments. Applied Sciences. 2023; 13(21):11643. https://doi.org/10.3390/app132111643
Chicago/Turabian StyleZhang, Shengkai, Yuanji Liu, and Qingdu Li. 2023. "LIF-M: A Manifold-Based Approach for 3D Robot Localization in Unstructured Environments" Applied Sciences 13, no. 21: 11643. https://doi.org/10.3390/app132111643