
Finite-Time Tracking Control of a Flexible Link Manipulator Based on an Extended State Observer


Abstract
:1. Introduction
2. Problem Formulation
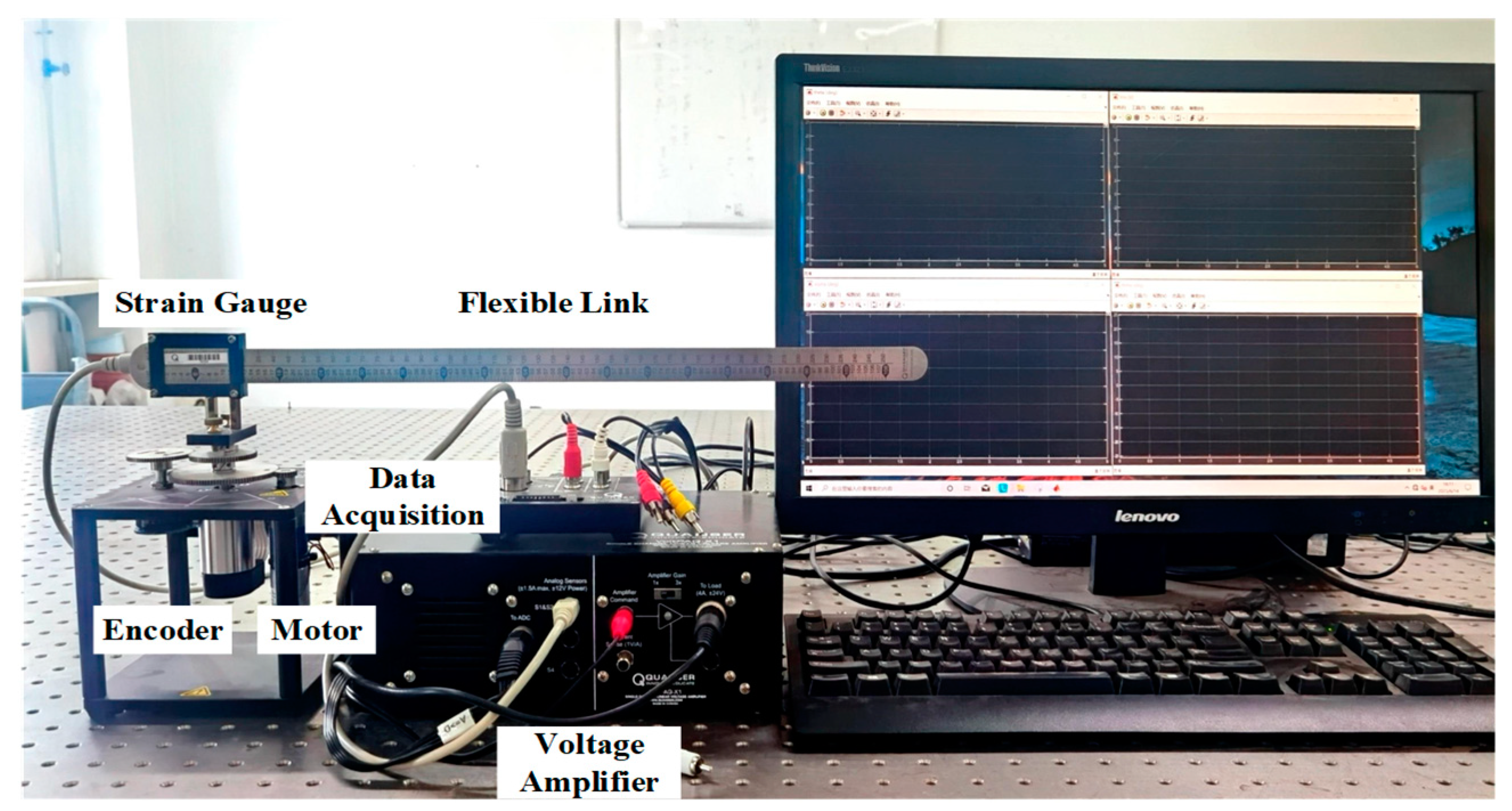
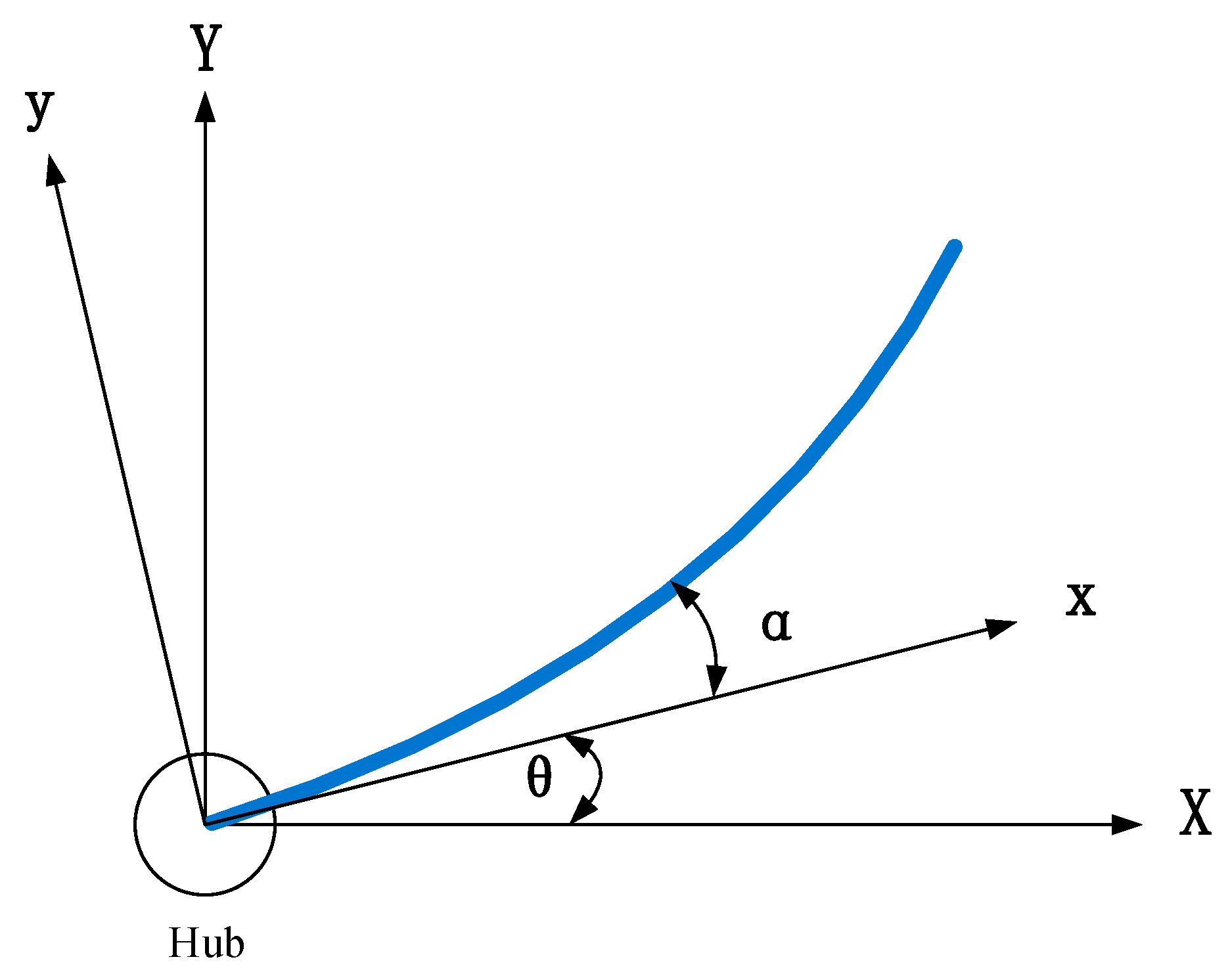
2.1. Platform Introduction and Operating Principle
2.2. Dynamic Model
3. Control Design
3.1. Adaptive Extended State Observer Design
3.2. Controller Design Based on an Extended State Observer
3.2.1. Extended State Observer Design and Stability Analysis
3.2.2. Adaptive Nonsingular Terminal Sliding Mode Controller Design and Stability Analysis
4. Simulation and Experimental Verification
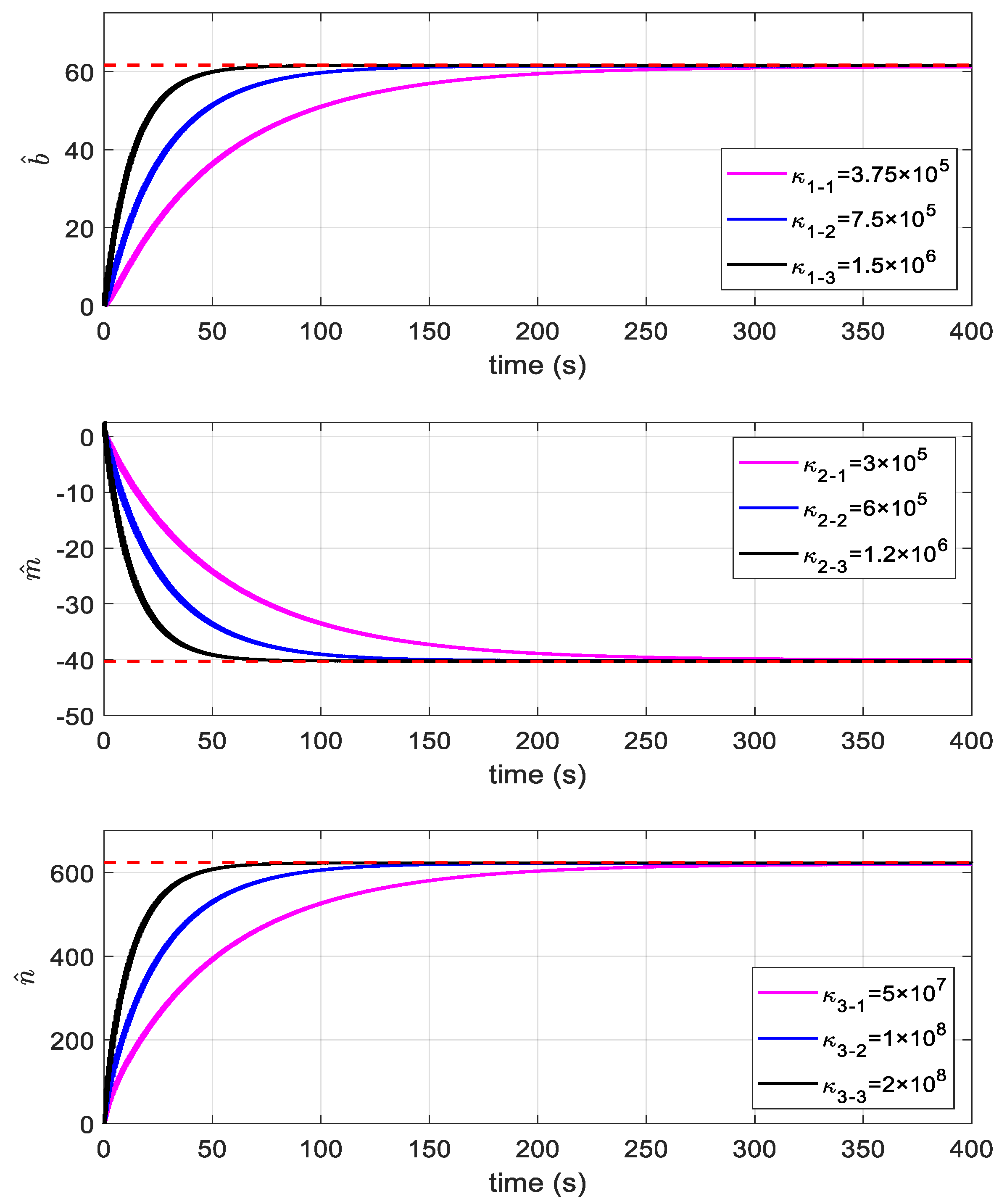
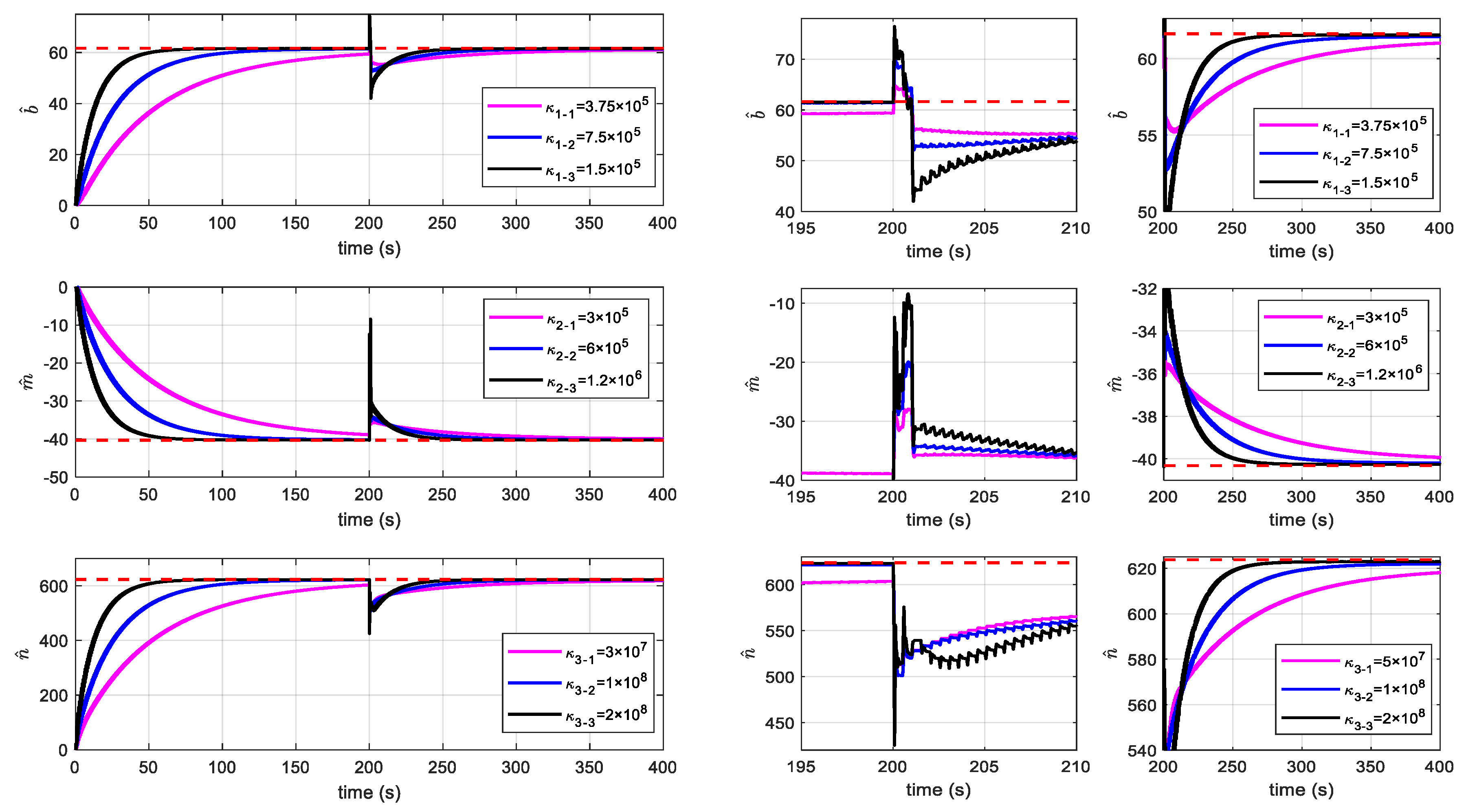
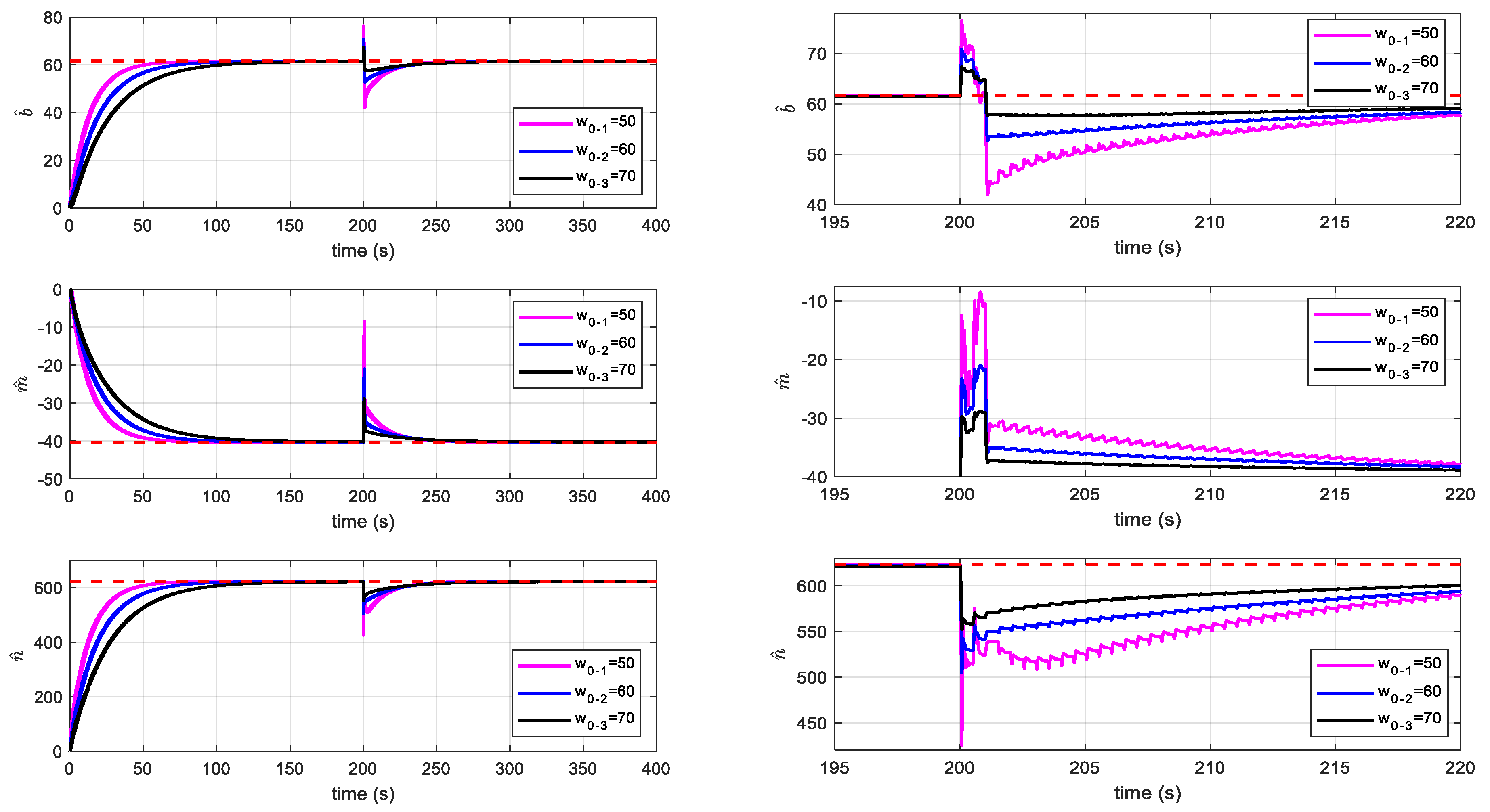
4.1. Estimation of Unknown Parameters of the System
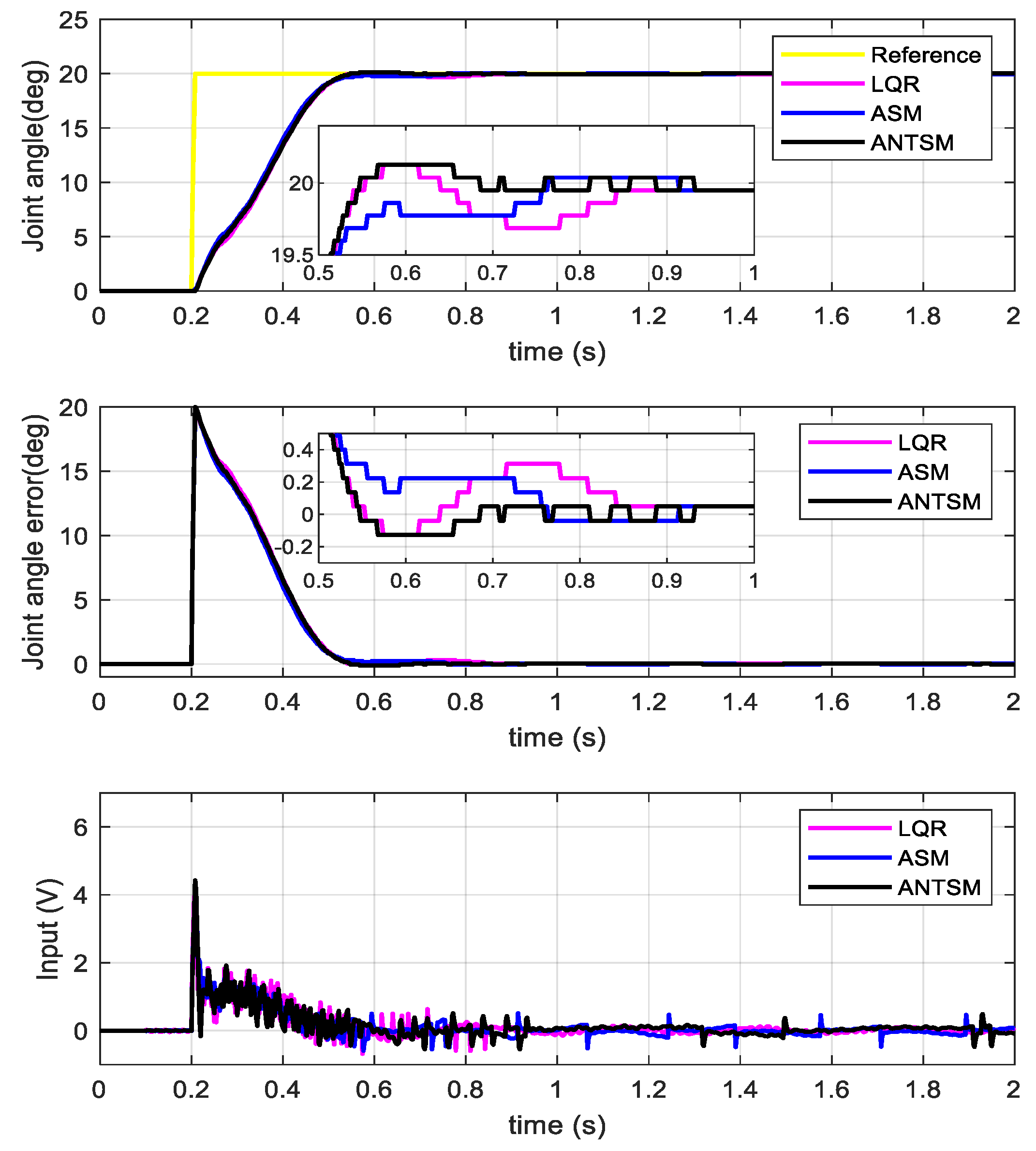
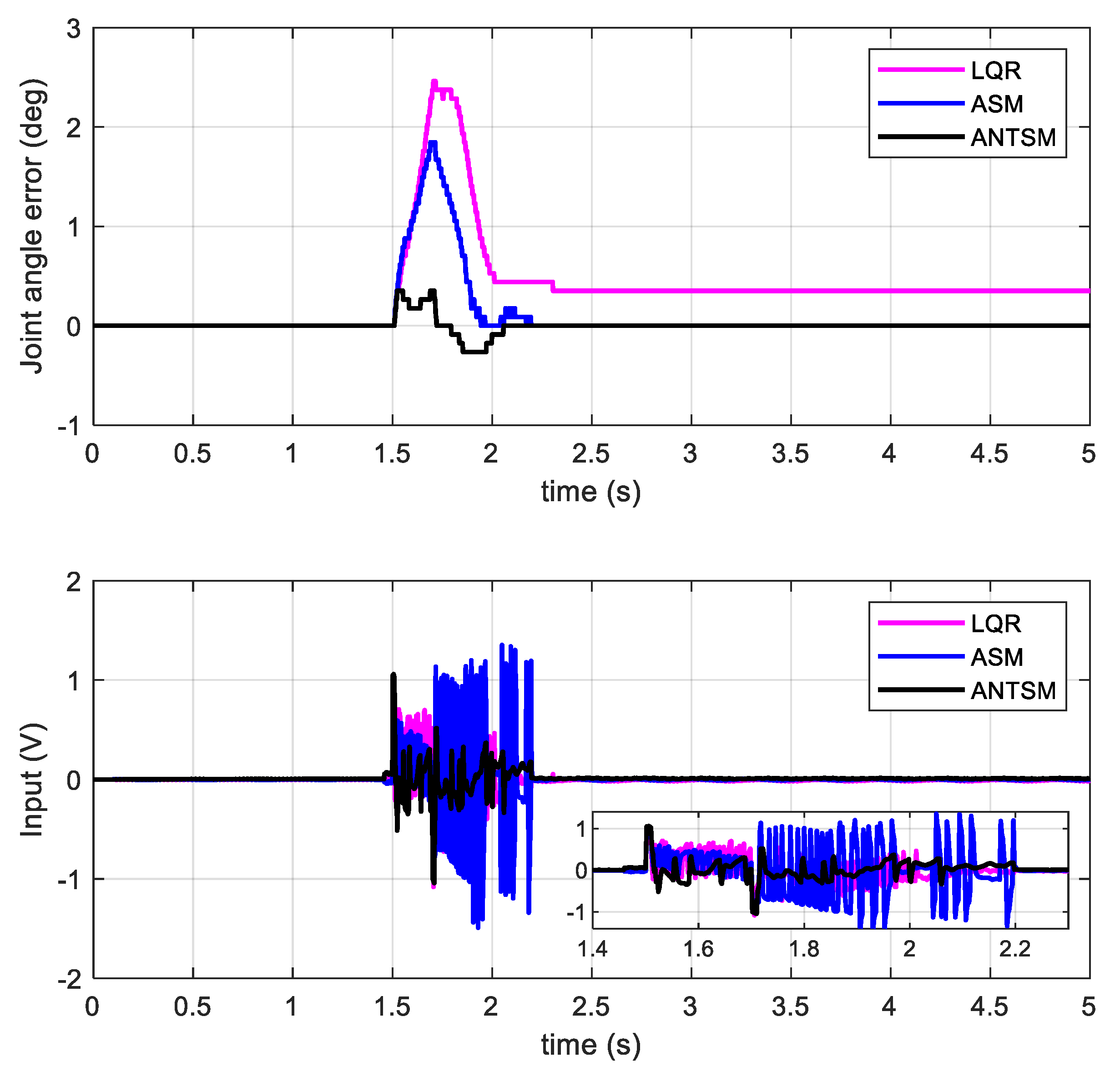
4.2. Tracking and Anti-Disturbance Performance
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- He, W.; Gao, H.; Zhou, C.; Yang, C.; Li, Z. Reinforcement Learning Control of a Flexible Two-Link Manipulator: An Experimental Investigation. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 7326–7336. [Google Scholar] [CrossRef]
- Gao, H.; He, W.; Zhou, C.; Sun, C. Neural Network Control of a Two-Link Flexible Robotic Manipulator Using Assumed Mode Method. IEEE Trans. Ind. Inform. 2019, 15, 755–765. [Google Scholar] [CrossRef]
- Rahmani, B.; Belkheiri, M. Adaptive neural network output feedback control for flexible multi-link robotic manipulators. Int. J. Control. 2019, 92, 2324–2338. [Google Scholar] [CrossRef]
- Sun, C.; He, W.; Hong, J. Neural Network Control of a Flexible Robotic Manipulator Using the Lumped Spring-Mass Model. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1863–1874. [Google Scholar] [CrossRef]
- Xu, B. Composite Learning Control of Flexible-Link Manipulator Using NN and DOB. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1979–1985. [Google Scholar] [CrossRef]
- Yang, C.; Xu, Y.; Zhou, L.; Sun, Y. Model-Free Composite Control of Flexible Manipulators Based on Adaptive Dynamic Programming. Complexity 2018, 2018, 9720309. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, J. Adaptive Iterative Learning Boundary Control of a Flexible Manipulator with Guaranteed Transient Performance. Asian J. Control 2018, 20, 1027–1038. [Google Scholar] [CrossRef]
- Yang, X.; Ge, S.S.; He, W. Dynamic modelling and adaptive robust tracking control of a space robot with two-link flexible manipulators under unknown disturbances. Int. J. Control 2018, 91, 969–988. [Google Scholar] [CrossRef]
- Xu, B.; Zhang, P. Composite Learning Sliding Mode Control of Flexible-Link Manipulator. Complexity 2017, 2017, 9430259. [Google Scholar] [CrossRef]
- Long, T.; Li, E.; Hu, Y.; Yang, L.; Fan, J.; Liang, Z.; Guo, R. A Vibration Control Method for Hybrid-Structured Flexible Manipulator Based on Sliding Mode Control and Reinforcement Learning. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 841–852. [Google Scholar] [CrossRef]
- Sanz, A.; Etxebarria, V. Experimental Control of a Two-Dof Flexible Robot Manipulator by Optimal and Sliding Methods. J. Intell. Robot. Syst. 2006, 46, 95–110. [Google Scholar] [CrossRef]
- Shang, D.; Li, X.; Yin, M.; Li, F. Tracking control strategy for space flexible manipulator considering nonlinear friction torque based on adaptive fuzzy compensation sliding mode controller. Adv. Space Res. 2023, 71, 3661–3680. [Google Scholar] [CrossRef]
- Tang, Y.; Sun, F.; Sun, Z. Neural network control of flexible-link manipulators using sliding mode. Neurocomputing 2006, 70, 288–295. [Google Scholar] [CrossRef]
- Sahu, U.K.; Subudhi, B.; Patra, D. Sampled-data extended state observer-based backstepping control of two-link flexible manipulator. Trans. Inst. Meas. Control 2019, 41, 3581–3599. [Google Scholar] [CrossRef]
- Fareh, R.; Al-Shabi, M.; Bettayeb, M.; Ghommam, J. Robust Active Disturbance Rejection Control for Flexible Link Manipulator. Robotica 2020, 38, 118–135. [Google Scholar] [CrossRef]
- Astorga-Zaragoza, C.M.; Zavala-Río, A.; Alvarado, V.M.; Méndez, R.M.; Reyes-Reyes, J. Performance monitoring of heat exchangers via adaptive observers. Measurement 2007, 40, 392–405. [Google Scholar] [CrossRef]
- Besançon, G. Remarks on nonlinear adaptive observer design. Syst. Control Lett. 2000, 41, 271–280. [Google Scholar] [CrossRef]
- Bowong, S.; Kakmeni, F.M.; Fotsin, H. A new adaptive observer-based synchronization scheme for private communication. Phys. Lett. A 2006, 355, 193–201. [Google Scholar] [CrossRef]
- Cho, Y.M.; Rajamani, R. A systematic approach to adaptive observer synthesis for nonlinear systems. IEEE Trans. Autom. Control 1997, 42, 534–537. [Google Scholar]
- Yue, J.; Liu, L.; Peng, Z.; Wang, D.; Li, T. Data-driven adaptive extended state observer design for autonomous surface vehicles with unknown input gains based on concurrent learning. Neurocomputing 2022, 467, 337–347. [Google Scholar] [CrossRef]
- Peng, Z.; Liu, L.; Wang, J. Output-Feedback Flocking Control of Multiple Autonomous Surface Vehicles Based on Data-Driven Adaptive Extended State Observers. IEEE Trans. Cybern. 2021, 51, 4611–4622. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z. Adaptive extended state observer based heading control for surface ships associated with sideslip compensation. Appl. Ocean Res. 2021, 110, 102605. [Google Scholar] [CrossRef]
- Jing, C.; Xu, H.; Song, X.; Lu, B. Adaptive extended state observer-based flatness nonlinear output control for torque tracking of electrohydraulic loading system. Trans. Inst. Meas. Control 2017, 40, 2999–3009. [Google Scholar] [CrossRef]
- Silva, B.P.; Santana, B.A.; Santos, T.L.; Martins, M.A. An implementable stabilizing model predictive controller applied to a rotary flexible link: An experimental case study. Control Eng. Pract. 2020, 99, 104396. [Google Scholar] [CrossRef]
- Altıner, B.; Delibaşı, A.; Erol, B. Modeling and control of flexible link manipulators for unmodeled dynamics effect. Proc. Inst. Mech. Eng. Part I: J. Syst. Control Eng. 2018, 233, 245–263. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and Bandwidth-Parameterization Based Controller Tuning. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003. [Google Scholar]
- Zuo, Z.; Tie, L. A new class of finite-time nonlinear consensus protocols for multi-agent systems. Int. J. Control 2014, 87, 363–370. [Google Scholar] [CrossRef]
- Shao, K.; Tang, R.; Xu, F.; Wang, X.; Zheng, J. Adaptive sliding mode control for uncertain Euler–Lagrange systems with input saturation. J. Frankl. Inst. 2021, 358, 8356–8376. [Google Scholar] [CrossRef]
- Ali, N.; Tawiah, I.; Zhang, W. Finite-time extended state observer based nonsingular fast terminal sliding mode control of autonomous underwater vehicles. Ocean Eng. 2020, 218, 108179. [Google Scholar] [CrossRef]
- Razmjooei, H.; Palli, G.; Janabi-Sharifi, F.; Alirezaee, S. Adaptive fast-finite-time extended state observer design for uncertain electro-hydraulic systems. Eur. J. Control 2023, 69, 100749. [Google Scholar] [CrossRef]
- Sun, L.; Liu, Y. Extended state observer augmented finite-time trajectory tracking control of uncertain mechanical systems. Mech. Syst. Signal Process. 2010, 139, 106374. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Scheme | Parameter | Value |
|---|---|---|
| LQR | k1, k2, k3, k4 | −14.0, 20.0, −1.4, 0.2 |
| ASM | k1, k2, k3, k4, λ | 88.0, , 200.0, 1.0, 7.95 |
| ANTSM | η1, η2, η3, λ, γ, k1, k2, k3 | 600.0, , , 0.135, 1.2, 700.0, , 1.0 |
| Control Scheme | Step Response Time (s) | Sinusoidal Tracking Error (°) | Anti-Disturbance Error (°) |
|---|---|---|---|
| LQR | 0.65 | 2 | 2.4 |
| ASM | 0.55 | 1 | 1.8 |
| ANTSM | 0.49 | 0.4 | 0.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jing, F.; Ma, C.; Xie, M.; Wang, F.; Cao, Y.; Fan, X. Finite-Time Tracking Control of a Flexible Link Manipulator Based on an Extended State Observer. Appl. Sci. 2023, 13, 13303. https://doi.org/10.3390/app132413303
Jing F, Ma C, Xie M, Wang F, Cao Y, Fan X. Finite-Time Tracking Control of a Flexible Link Manipulator Based on an Extended State Observer. Applied Sciences. 2023; 13(24):13303. https://doi.org/10.3390/app132413303
Chicago/Turabian StyleJing, Feng, Caiwen Ma, Meilin Xie, Fan Wang, Yu Cao, and Xiao Fan. 2023. "Finite-Time Tracking Control of a Flexible Link Manipulator Based on an Extended State Observer" Applied Sciences 13, no. 24: 13303. https://doi.org/10.3390/app132413303
APA StyleJing, F., Ma, C., Xie, M., Wang, F., Cao, Y., & Fan, X. (2023). Finite-Time Tracking Control of a Flexible Link Manipulator Based on an Extended State Observer. Applied Sciences, 13(24), 13303. https://doi.org/10.3390/app132413303