
Damage Creep Model of Viscoelastic Rock Based on the Distributed Order Calculus


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Definition and Properties of Distributed Order Calculus
- (1)
- Definitions and properties of distributed order derivatives
- (i)
- Let , if and , if , Equation (7) could be obtained.
- (ii)
- Let , if , Equation (8) could be obtained.
- (iii)
- Let , if , Equation (9) could be obtained.
- (2)
- Definitions and properties of distributed order integrals
- (i)
- and it is an entirely monotonic function;
- (ii)
- For any t, .
3. Establishment of the Distributed Order Rheological Model of Viscoelastic Materials and the Mechanical Response Characteristics
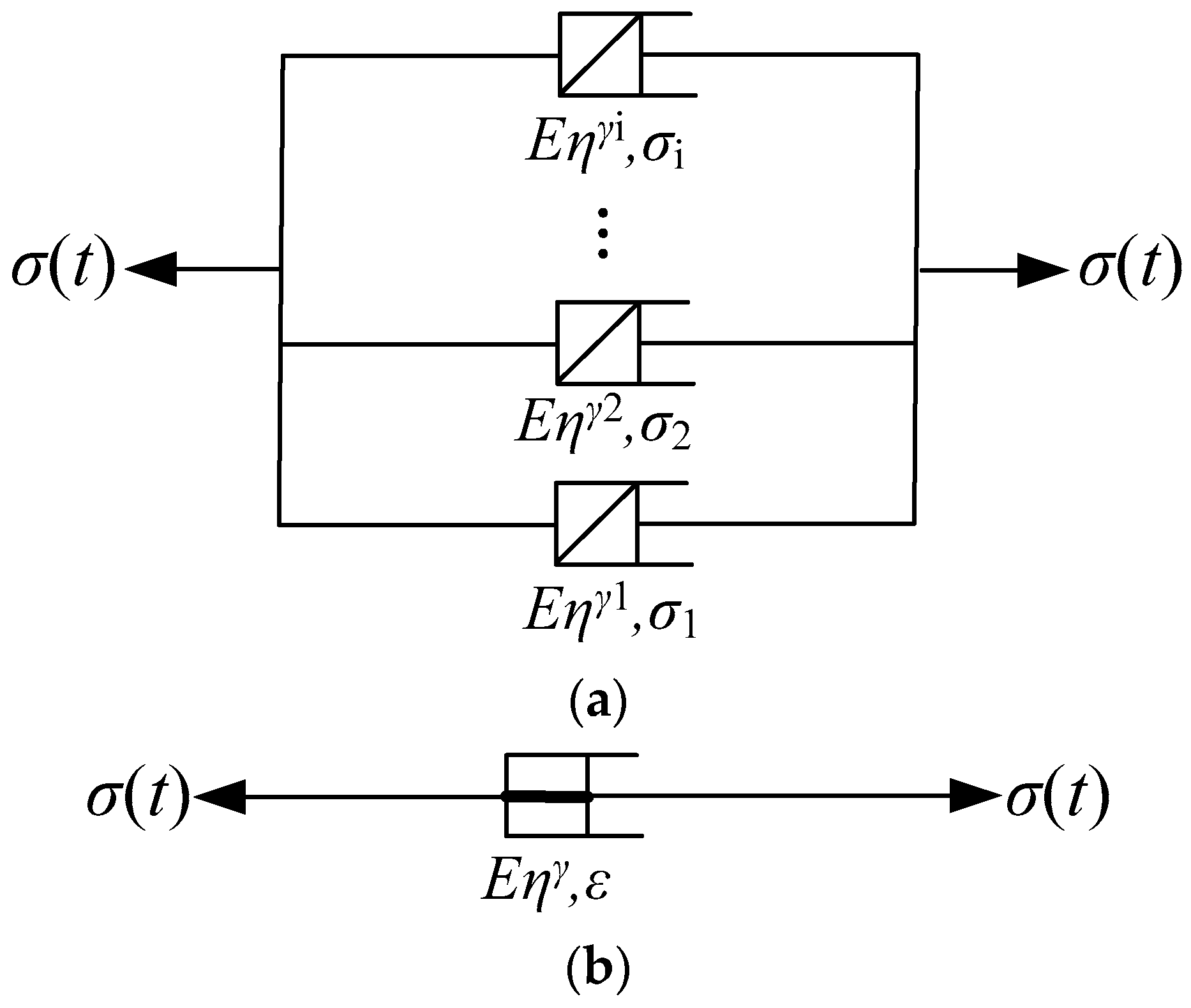
3.1. Establishment of the Distributed Order Damper
3.2. Establishment of the Distributed Order Rheological Model and Operator Analysis
- (1)
- Establishment of the model
- (2)
- Properties of model operators
3.3. Response Characteristics of the Rheological Properties of the Distributed Order Rheological Model
4. The Distributed Order Damage Creep Model of Rock Mass
4.1. Establishment and Properties of the Distributed Order Damper Damage Model
- (1)
- Establishment of the distributed order damper damage model
- (2)
- Properties of operators
- (i)
- Properties of
- (ii)
- Properties analysis of the operator
- (3)
- Creep response of the distributed order damage damper
4.2. Establishment of the Distributed Order Damage Creep Combined Model of Rock Mass
5. Conclusions
- I.
- Based on the definitions and properties of the distributed order calculus and the single fractional order damper, the distributed order damper was established by connecting multiple fractional order dampers in parallel. The corresponding constitutive equations and creep property equations were obtained.
- II.
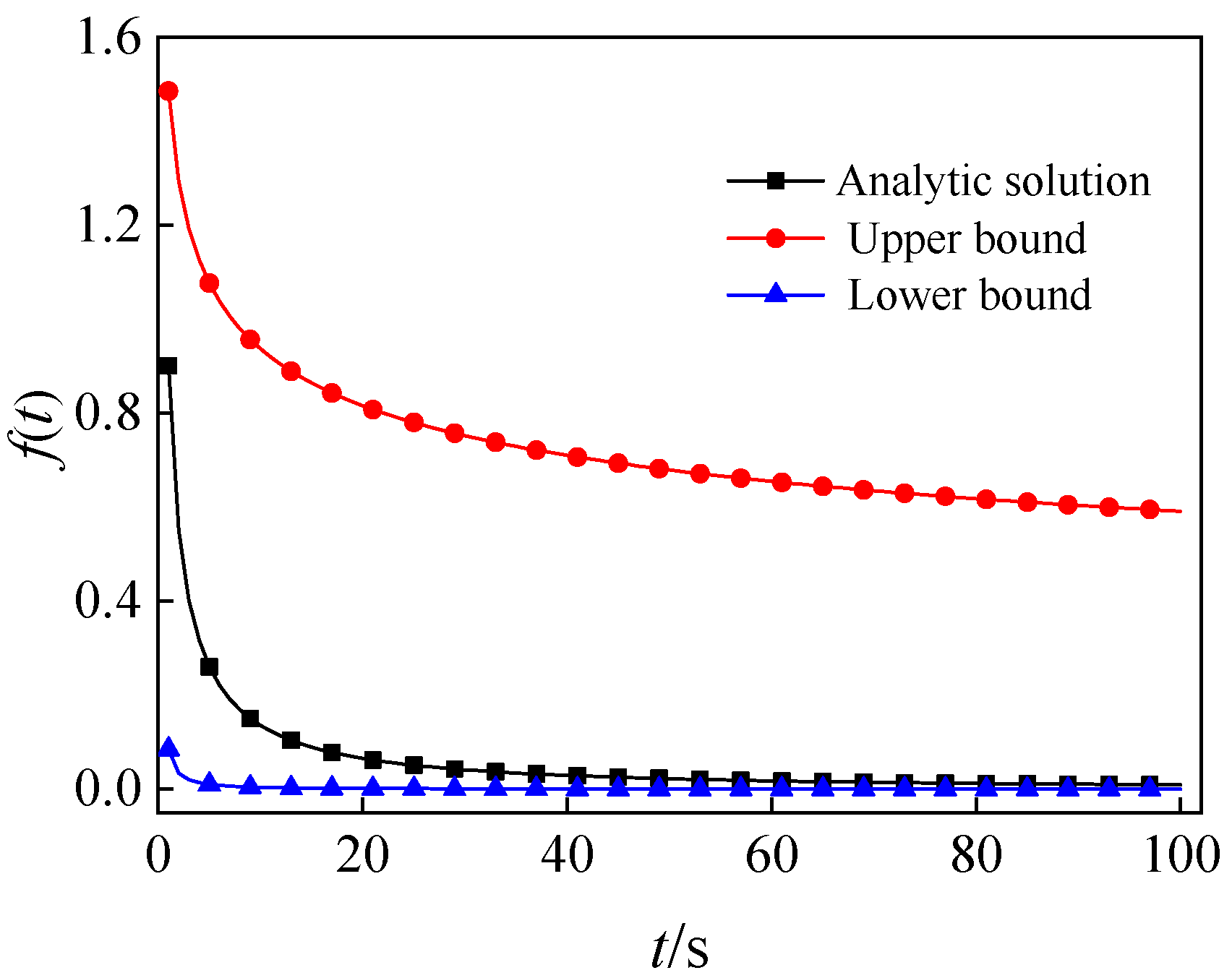
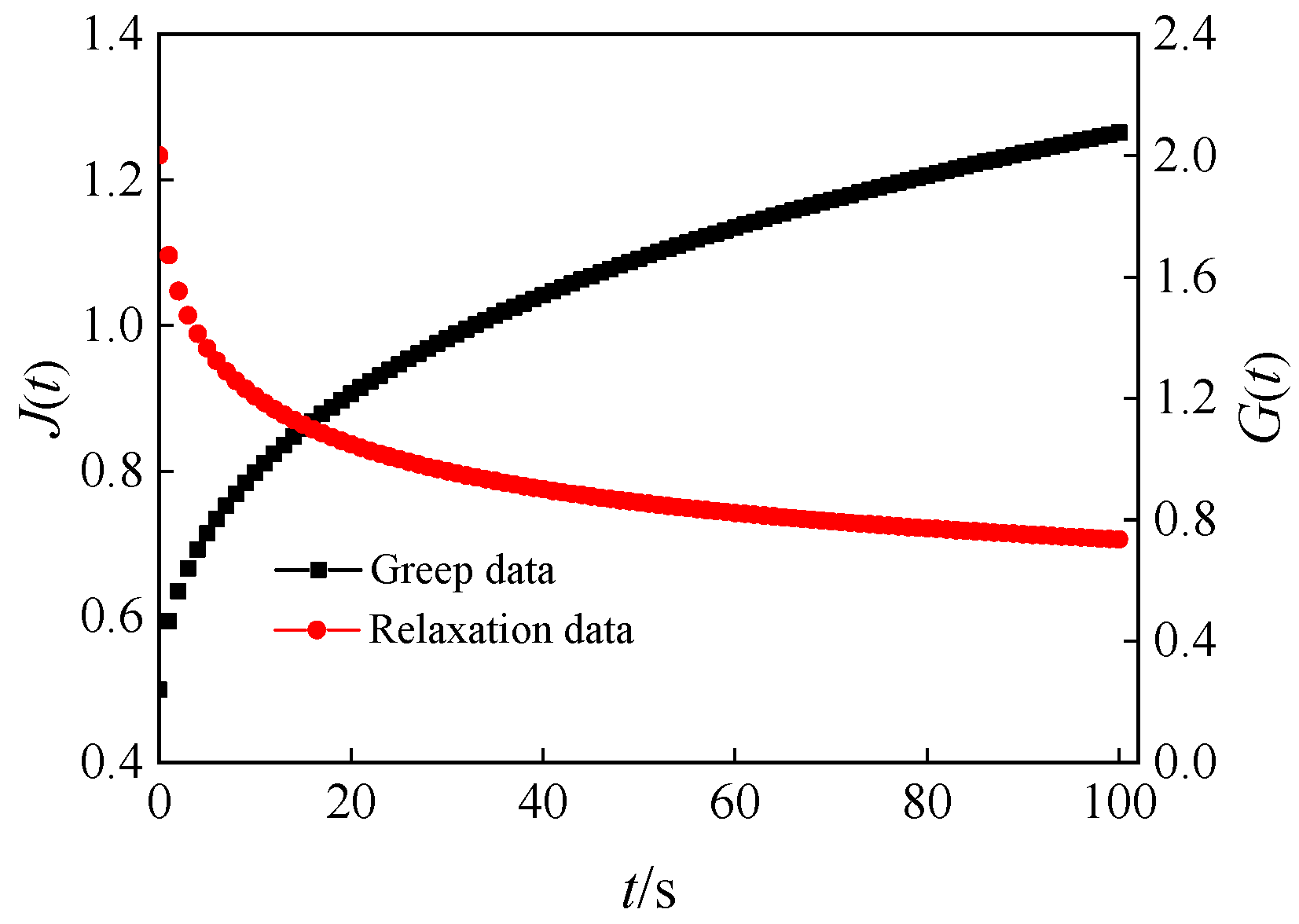
- The integer-order three-parameter solid model was improved to a distributed order three-parameter solid model by introducing the distributed order damper. The creep compliance and relaxation modulus equations were obtained in the time domain by the Laplace transforms. After analysing the time-domain expressions of the distributed order operators, the operators’ upper and lower boundaries could be obtained. The theoretical results could reflect the creep properties and relaxation characteristics of the distributed order three-parameter solid model. This indicated that the model could reflect the viscoelastic properties of materials.
- III.
- Based on the single distributed order damage damper, the distributed order damage damper model was established by connecting the elements in series. Its corresponding constitutive equations and creep equations were established. The asymptotic properties of its two types of operators were analysed. Moreover, calculation examples were given to verify the creep properties of the model. The results showed that the established model could reflect the creep properties of the rock materials at the accelerated deformation stage. Moreover, as λ increased, the creep properties became more significant.
- IV.
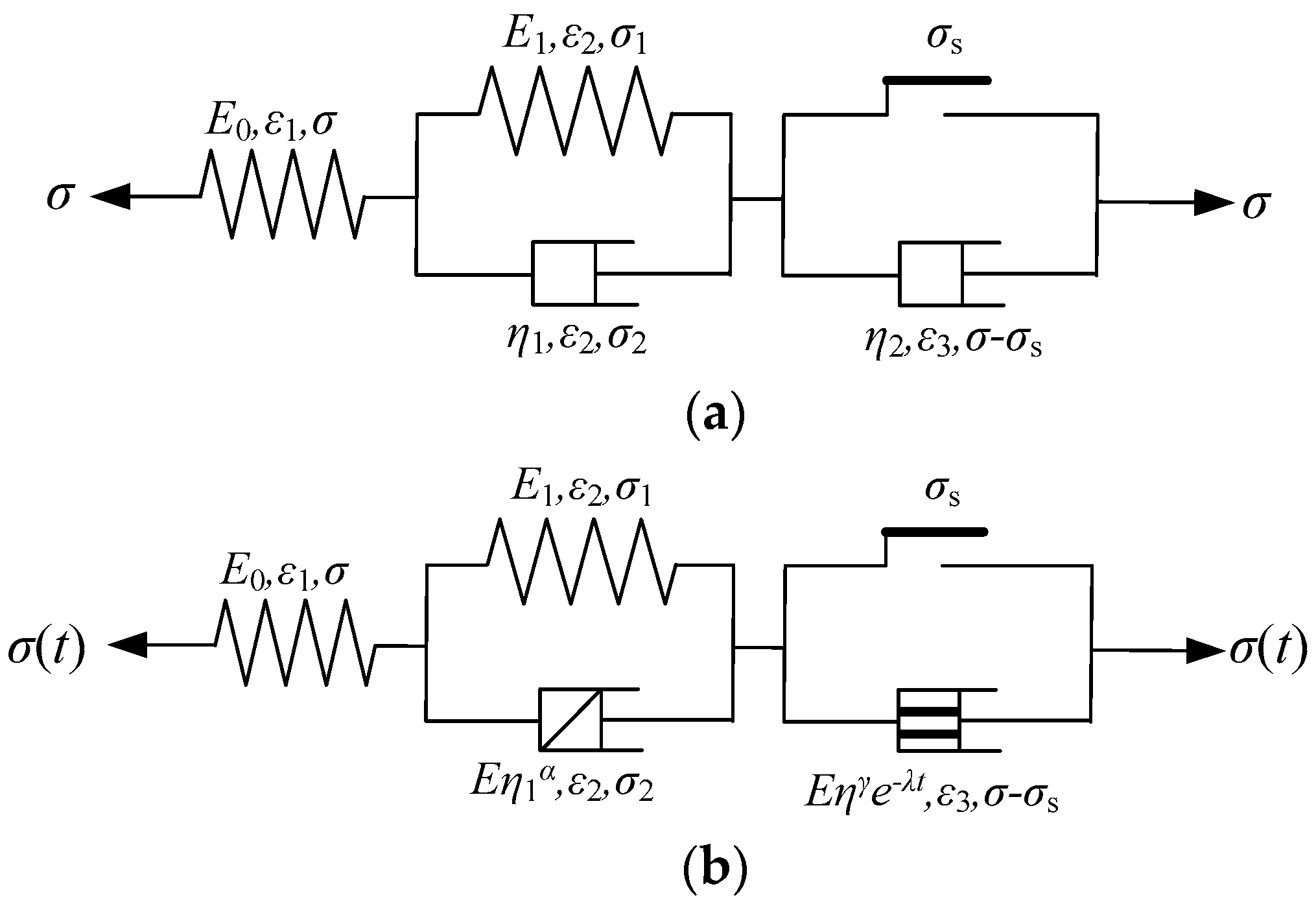
- Based on the integer-order Nishihara model, the distributed order damage Nishihara model was established by introducing the fractional order damper and the distributed order damage damper. The creep properties equations were obtained. The specific calculation examples indicated that with proper damage parameters, the curves of the creep properties could better show the creep properties of the rock mass at the stages of instantaneous deformation, deceleration deformation, and acceleration deformation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, C.; Yu, H.; Lin, Z.; Zhao, Y. Dynamic model and behaviour of viscoelastic beam based on the absolute nodal coordinate formulation. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2014, 229, 84–96. [Google Scholar] [CrossRef]
- Rubin, M.B.; Nadler, B. An Eulerian formulation for large deformations of anisotropic elastic and viscoelastic solids and viscous fluids. Contin. Mech. Thermodyn. 2016, 28, 515–522. [Google Scholar] [CrossRef]
- Lu, S.; Chung, D.D.L. Viscoelastic Behavior of Silica Particle Compacts under Dynamic Compression. J. Mater. Civ. Eng. 2014, 26, 551–553. [Google Scholar] [CrossRef]
- Lang, L.; Song, K.-I.; Zhai, Y.; Lao, D.; Lee, H.-L. Stress Wave Propagation in Viscoelastic-Plastic Rock-Like Materials. Materials 2016, 9, 377. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Green, H.W. Experimental Investigation of Eclogite Rheology and Its Fabrics at High Temperature and Pressure. J. Metamorph. Geol. 2007, 25, 97–115. [Google Scholar] [CrossRef]
- Xie, S.; Pan, H.; Zeng, J.; Wang, E.; Chen, D.; Zhang, T.; Peng, X.; Yang, J.; Chen, F.; Qiao, S. A case study on control technology of surrounding rock of a large section chamber under a 1200-m deep goaf in Xingdong coal mine, China. Eng. Fail. Anal. 2019, 104, 112–125. [Google Scholar] [CrossRef]
- Li, L. Studies of mineral properties at mantle condition using Deformation multi-anvil apparatus. Prog. Nat. Sci. 2009, 19, 1467–1475. [Google Scholar] [CrossRef]
- Tian, X.; Xiao, H.; Li, Z.; Su, H.; Ouyang, Q.; Luo, S.; Yu, X. A Fractional Order Creep Damage Model for Microbially Improved Expansive Soils. Front. Earth Sci. 2022, 10, 942844. [Google Scholar] [CrossRef]
- Aydan, Ö; Ito, T.; Özbay, U.; Kwasniewski, M.; Shariar, K.; Okuno, T.; Özgenoğlu, A.; Malan, D.F.; Okada, T. ISRM Suggested Methods for Determining the Creep Characteristics of Rock. Rock Mech. Rock Eng. 2014, 47, 275–290. [Google Scholar] [CrossRef] [Green Version]
- Hou, R.; Zhang, K.; Tao, J.; Xue, X.; Chen, Y. A Nonlinear Creep Damage Coupled Model for Rock Considering the Effect of Initial Damage. Rock Mech. Rock Eng. 2019, 52, 1275–1285. [Google Scholar] [CrossRef]
- Lyu, C.; Liu, J.; Ren, Y.; Liang, C.; Liao, Y. Study on very long-term creep tests and nonlinear creep-damage constitutive model of salt rock. Int. J. Rock Mech. Min. Sci. 2021, 146, 104873. [Google Scholar] [CrossRef]
- Gao, Y.; Yin, D. A full-stage creep model for rocks based on the variable-order fractional calculus. Appl. Math. Model. 2021, 95, 435–446. [Google Scholar] [CrossRef]
- Liu, H.Z.; Xie, H.Q.; He, J.D.; Xiao, M.L.; Zhuo, L. Nonlinear creep damage constitutive model for soft rocks. Mech. Time-Depend. Mater. 2017, 21, 73–96. [Google Scholar] [CrossRef]
- Ma, L.; Wang, M.; Zhang, N.; Fan, P.; Li, J. A Variable-Parameter Creep Damage Model Incorporating the Effects of Loading Frequency for Rock Salt and Its Application in a Bedded Storage Cavern. Rock Mech. Rock Eng. 2017, 50, 2495–2509. [Google Scholar] [CrossRef]
- Zhou, H.; Wang, C.; Han, B.; Duan, Z. A creep constitutive model for salt rock based on fractional derivatives. Int. J. Rock Mech. Min. Sci. 2011, 48, 116–121. [Google Scholar] [CrossRef]
- Chen, J.; Jiang, Q.; Hu, Y.; Qin, W.; Li, S.; Xiong, J. Time-dependent performance of damaged marble and corresponding fractional order creep constitutive model. Arab. J. Geosci. 2020, 13, 1150. [Google Scholar] [CrossRef]
- Wu, F.; Liu, J.F.; Wang, J. An improved Maxwell creep model for rock based on variable-order fractional derivatives. Environ. Earth Sci. 2015, 73, 6965–6971. [Google Scholar] [CrossRef]
- Li, J.; Zhang, J.; Yang, X.; Zhang, A.; Yu, M. Monte Carlo simulations of deformation behaviour of unbound granular materials based on a real aggregate library. Int. J. Pavement Eng. 2023, 24, 2165650. [Google Scholar] [CrossRef]
- Han, C.; Liu, X.; Li, D.; Shao, Y. Constitutive modeling of rock materials based on variable-order fractional theory. Mech. Time-Depend. Mater. 2021, 26, 485–498. [Google Scholar] [CrossRef]
- Kawada, Y.; Yajima, T.; Nagahama, H. Fractional-order derivative and time-dependent viscoelastic behaviour of rocks and minerals. Acta Geophys. 2013, 61, 1690–1702. [Google Scholar] [CrossRef]
- Sheikhani, P.P.A.H.R.; Najafi, H.S.; Ziabari, A.A. Numerical solution of fractional Mathieu equations by using block-pulse wavelets. J. Ocean. Eng. Sci. 2019, 4, 299–307. [Google Scholar] [CrossRef]
- Ibrahim, R.W.; Meshram, C.; Hadid, S.B.; Momani, S. Analytic solutions of the generalized water wave dynamical equations based on time-space symmetric differential operator. J. Ocean Eng. Sci. 2020, 5, 186–195. [Google Scholar] [CrossRef]
- Lorenzo, C.F.; Hartley, T.T. Variable Order and Distributed Order Fractional Operators. Nonlinear Dyn. 2002, 29, 57–98. [Google Scholar] [CrossRef]
- Bansal, R.K. Approximation of surface–groundwater interaction mediated by vertical streambank in sloping terrains. J. Ocean Eng. Sci. 2017, 2, 18–27. [Google Scholar] [CrossRef] [Green Version]
- Caputo, M. Linear Models of Dissipation whose Q is almost Frequency Independent—II. Geophys. J. Int. 1967, 13, 529–539. [Google Scholar] [CrossRef]
- Bagley, R.L.; Torvik, P.J. On the existence of the order domain and the solution of distributed order equations. II. Int. J. Appl. Math. 2000, 2, 965–987. [Google Scholar]
- Atanackovic, T.M.; Budincevic, M.; Pilipovic, S. On a fractional distributed-order oscillator. J. Phys. A Math. Gen. 2005, 38, 6703–6713. [Google Scholar] [CrossRef]
- Atanackovic, T.M.; Pilipovic, S.; Zorica, D. Time distributed-order diffusion-wave equation. I. Volterra-type equation. Proc. R. Soc. A Math. Phys. Eng. Sci. 2009, 465, 1869–1891. [Google Scholar] [CrossRef]
- Gerasimov, A.N. A generalization of linear laws of deformation and its application to problems of internal friction. Akad. Nauk SSSR. Prikl. Mat. Meh. 1948, 12, 251–260. [Google Scholar]
- Atanackovic, T.M.; Pilipovic, S.; Zorica, D. Time distributed-order diffusion-wave equation. II. Applications of Laplace and Fourier transformations. Proc. R. Soc. A Math. Phys. Eng. Sci. 2009, 465, 1893–1917. [Google Scholar] [CrossRef]
- Yuttanan, B.; Razzaghi, M.; Vo, T.N. A numerical method based on fractional-order generalized Taylor wavelets for solving distributed-order fractional partial differential equations. Appl. Numer. Math. 2020, 160, 349–367. [Google Scholar] [CrossRef]
- Atanackovic, T.M.; Pilipovic, S.; Zorica, D. Existence and calculation of the solution to the time distributed order diffusion equation. Phys. Scr. 2009, 014012. [Google Scholar] [CrossRef]
- Mainardi, F.; Pagnini, G. The role of the Fox–Wright functions in fractional sub-diffusion of distributed order. J. Comput. Appl. Math. 2007, 207, 245–257. [Google Scholar] [CrossRef] [Green Version]
- Pourbabaee, M.; Saadatmandi, A. The construction of a new operational matrix of the distributed-order fractional derivative using Chebyshev polynomials and its applications. Int. J. Comput. Math. 2021, 98, 2310–2329. [Google Scholar] [CrossRef]
- Chen, W.; Sun, H.; Zhang, X.; Korošak, D. Anomalous diffusion modeling by fractal and fractional derivatives. Comput. Math. Appl. 2010, 59, 1754–1758. [Google Scholar] [CrossRef] [Green Version]
- Bu, W.; Xiao, A.; Zeng, W. Finite Difference/Finite Element Methods for Distributed-Order Time Fractional Diffusion Equations. J. Sci. Comput. 2017, 72, 422–441. [Google Scholar] [CrossRef]
- Veeresha, P.; Prakasha, D.; Magesh, N.; Christopher, A.J.; Sarwe, D.U. Solution for fractional potential KdV and Benjamin equations using the novel technique. J. Ocean Eng. Sci. 2021, 6, 265–275. [Google Scholar] [CrossRef]
- Hartley, T.T.; Lorenzo, C.F. Fractional-order system identification based on continuous order-distributions. Signal Process. 2003, 83, 2287–2300. [Google Scholar] [CrossRef]
- Rahimkhani, P.; Ordokhani, Y. Approximate solution of nonlinear fractional integro-differential equations using fractional alternative Legendre functions. J. Comput. Appl. Math. 2019, 365, 112365. [Google Scholar] [CrossRef]
- Liu, W.; Röckner, M.; da Silva, J.L. Strong dissipativity of generalized time-fractional derivatives and quasi-linear (stochastic) partial differential equations. J. Funct. Anal. 2021, 281, 109135. [Google Scholar] [CrossRef]
- Xu, M.; Tan, W. Intermediate processes and critical phenomena: Theory, method and progress of fractional operators and their applications to modern mechanics. Sci. China Phys. Mech. Astron. 2006, 49, 257–272. [Google Scholar] [CrossRef]
- Kochubei, A.N. Distributed order calculus and equations of ultraslow diffusion. J. Math. Anal. Appl. 2007, 340, 252–281. [Google Scholar] [CrossRef] [Green Version]
- Luchko, Y. Initial-boundary-value problems for the generalized multi-term time-fractional diffusion equation. J. Math. Anal. Appl. 2011, 374, 538–548. [Google Scholar] [CrossRef] [Green Version]
- Gao, G.-H.; Sun, Z.-Z. Two alternating direction implicit difference schemes with the extrapolation method for the two-dimensional distributed-order differential equations. Comput. Math. Appl. 2015, 69, 926–948. [Google Scholar] [CrossRef]
- Mainardi, F.; Mura, A.; Gorenflo, R.; Stojanović, M. The Two Forms of Fractional Relaxation of Distributed Order. J. Vib. Control 2007, 13, 1249–1268. [Google Scholar] [CrossRef] [Green Version]
- Cao, L.; Pu, H.; Li, Y.; Li, M. Time domain analysis of the weighted distributed order rheological model. Mech. Time-Depend. Mater. 2016, 20, 601–619. [Google Scholar] [CrossRef]
- Cao, L.; Li, Y.; Tian, G.; Liu, B.; Chen, Y. Time domain analysis of the fractional order weighted distributed parameter Maxwell model. Comput. Math. Appl. 2013, 66, 813–823. [Google Scholar] [CrossRef]
- Hou, R.; Xu, L.; Zhang, D.; Shi, Y.; Shi, L. Experimental Investigations on Creep Behavior of Coal under Combined Compression and Shear Loading. Geofluids 2021, 2021, 9965228. [Google Scholar] [CrossRef]
- Li, G.; Wang, Y.; Wang, D.; Yang, X.; Yang, S.; Zhang, S.; Li, C.; Teng, R. An unsteady creep model for a rock under different moisture contents. Mech. Time-Depend. Mater. 2022, 1–15. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Pu, H.; Cao, L.; Sha, Z.; Yu, H.; Zhang, J.; Zhang, L. Damage Creep Model of Viscoelastic Rock Based on the Distributed Order Calculus. Appl. Sci. 2023, 13, 4404. https://doi.org/10.3390/app13074404
Li M, Pu H, Cao L, Sha Z, Yu H, Zhang J, Zhang L. Damage Creep Model of Viscoelastic Rock Based on the Distributed Order Calculus. Applied Sciences. 2023; 13(7):4404. https://doi.org/10.3390/app13074404
Chicago/Turabian StyleLi, Ming, Hai Pu, Lili Cao, Ziheng Sha, Hao Yu, Jiazhi Zhang, and Lianying Zhang. 2023. "Damage Creep Model of Viscoelastic Rock Based on the Distributed Order Calculus" Applied Sciences 13, no. 7: 4404. https://doi.org/10.3390/app13074404