
From Structural Optimization Results to Parametric CAD Modeling—Automated, Skeletonization-Based Truss Recognition


Abstract
:1. Introduction
2. Materials and Methods
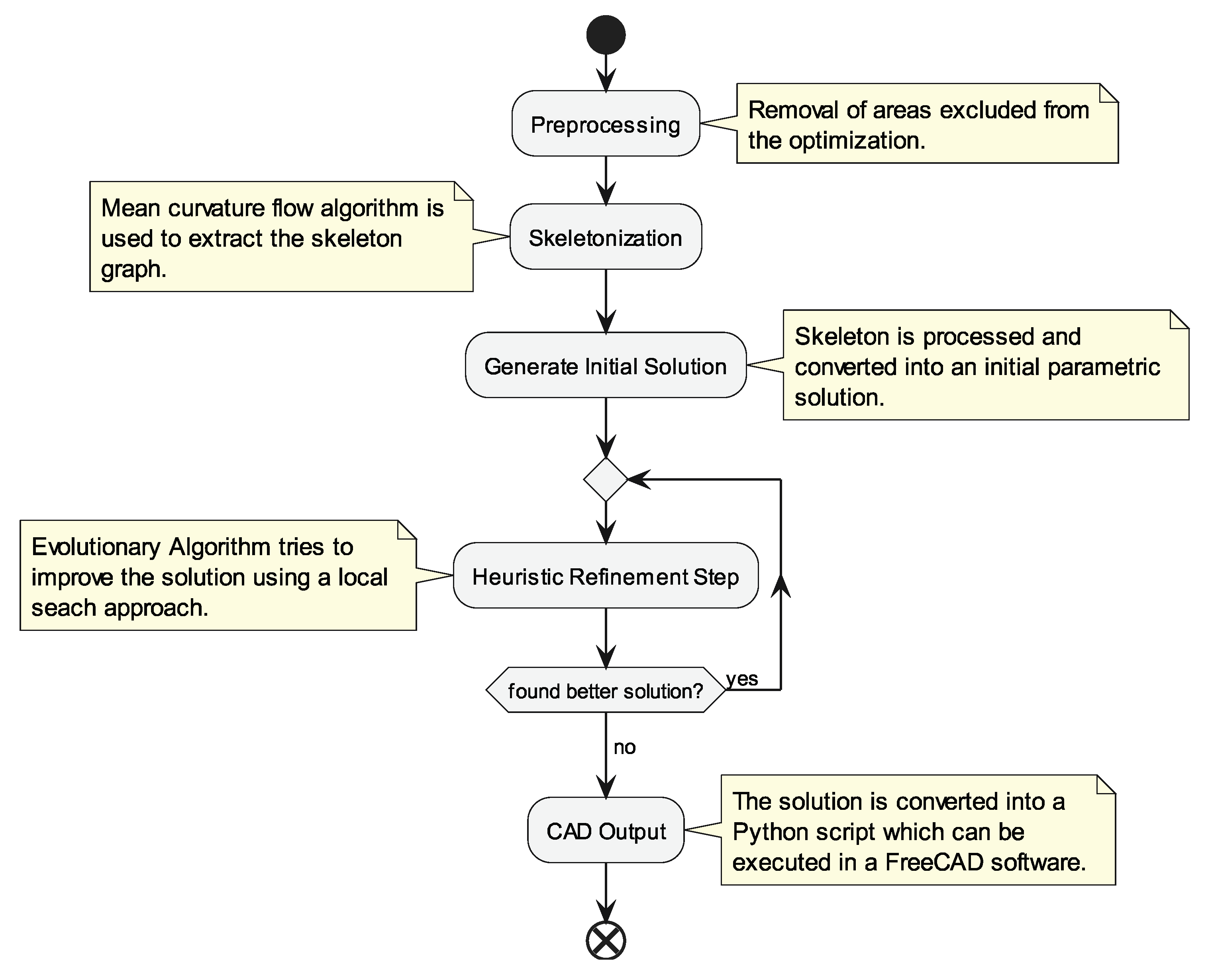
2.1. Preprocessing
2.2. Skeletonization
2.3. Skeleton Processing
2.4. Heuristic Refinement
2.5. Postprocessing and CAD Integration
2.6. Solution Verification—Methodology
3. Results
3.1. Comparison with the Literature
3.2. Case Study 1—Cantilever Bar Bending
3.3. Case Study 2—Box Corner
4. Discussion
- Truss-based geometry was chosen because, compared to more complex geometries, it has fewer degrees of freedom to optimize, so the heuristic refinement process converges fast. The chosen structural elements are insufficient for structures with bending moments under load and there is a need for support of more complex geometries to properly capture the complexity of the input meshes. The proposed heuristic refinement step and the Fitness Function in particular work with solutions built out of any parameterized geometries. This makes it possible to apply the algorithm to any geometries produced by structural optimization algorithms, without the current limitation to trusses.
- The refinement process is heuristic; hence, the final solution may not meet the required mechanical properties. There is a need for research into the viability of adding an additional final refinement step where feedback from structural analysis is used to adjust the model.
- Heuristic refinement in this proof of concept work utilizes a random search approach. This process can be highly optimized. For example, adjusting positions of solution graph nodes is possible with the use of gradient descent methods.
- The initial topology, obtained from the processed mesh skeleton, is not changed during refinement. It is possible to enrich the heuristic refinement step with operations by changing the solution graph topology.
- The algorithm configuration, such as heuristic refinement parameters, should be replaced with values derived directly from input data, i.e. the initial solution’s cylinder radius can be automatically determined using the mean diameter of the input mesh structures.
- The presented approach is a fully automated parametrization procedure. On the other hand, when the manufacturing preparation requires increasing minimal thickness, for example, to decrease thermal stresses during the manufacturing process, a parametric model produced by the algorithm can be used to manually apply corrections. Those corrections are then fused back with the original mesh, preserving features that were not captured by the parametric model while improving the properties of the optimized mesh. Additional research is required to evaluate this approach for industrial use.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| API | Application Programming Interface |
| CAD | Computer-Aided Design |
| FDM | Fused Deposition Modeling |
| PBF | Powder Bed Fusion |
| LC | Load Case |
References
- Wang, W.; Munro, D.; Wang, C.C.; van Keulen, F.; Wu, J. Space-time topology optimization for additive manufacturing: Concurrent optimization of structural layout and fabrication sequence. Struct. Multidiscip. Optim. 2020, 61, 1–18. [Google Scholar] [CrossRef]
- Zhu, J.; Zhou, H.; Wang, C.; Zhou, L.; Yuan, S.; Zhang, W. A review of topology optimization for additive manufacturing: Status and challenges. Chin. J. Aeronaut. 2021, 34, 91–110. [Google Scholar]
- Saadlaoui, Y.; Milan, J.L.; Rossi, J.M.; Chabrand, P. Topology optimization and additive manufacturing: Comparison of conception methods using industrial codes. J. Manuf. Syst. 2017, 43, 178–186. [Google Scholar] [CrossRef]
- Nowak, M.; Sokołowski, J.; Żochowski, A. Justification of a certain algorithm for shape optimization in 3D elasticity. Struct. Multidiscip. Optim. 2018, 57, 721–734. [Google Scholar] [CrossRef]
- Nowak, M.; Sokołowski, J.; Żochowski, A. Biomimetic approach to compliance optimization and multiple load cases. J. Optim. Theory Appl. 2020, 184, 210–225. [Google Scholar] [CrossRef]
- Nowak, M.; Boguszewski, A. Topology optimization without volume constraint–the new paradigm for lightweight design. Bull. Pol. Acad. Sci. Tech. Sci. 2021, 69, e137732. [Google Scholar]
- Sbrugnera Sotomayor, N.A.; Caiazzo, F.; Alfieri, V. Enhancing design for additive manufacturing workflow: Optimization, design and simulation tools. Appl. Sci. 2021, 11, 6628. [Google Scholar] [CrossRef]
- Dalpadulo, E.; Pini, F.; Leali, F. Integrated CAD platform approach for Design for Additive Manufacturing of high performance automotive components. Int. J. Interact. Des. Manuf. (IJIDeM) 2020, 14, 899–909. [Google Scholar] [CrossRef]
- Gedig, M. A Framework for Form-Based Conceptual Design in Structural Engineering. Ph.D. Thesis, University of British Columbia, Vancouver, BC, Canada, 2010. [Google Scholar]
- Gamache, J.F.; Vadean, A.; Noirot-Nérin, É.; Beaini, D.; Achiche, S. Image-based truss recognition for density-based topology optimization approach. Struct. Multidiscip. Optim. 2018, 58, 2697–2709. [Google Scholar] [CrossRef]
- Mandhyan, A.; Srivastava, G.; Krishnamoorthi, S. A novel method for prediction of truss geometry from topology optimization. Eng. Comput. 2017, 33, 95–106. [Google Scholar] [CrossRef]
- Shannon, T. A Feature-Mapping Optimisation Framework for CAD Based Design. Ph.D. Thesis, Queen’s University Belfast, Belfast, UK, 2023. [Google Scholar]
- Brackett, D.; Ashcroft, I.; Hague, R. Topology optimization for additive manufacturing. In 2011 International Solid Freeform Fabrication Symposium; University of Texas at Austin: Austin, TX, USA, 2011. [Google Scholar]
- Larsen, S.; Jensen, C.G. Converting topology optimization results into parametric CAD models. Computer-Aided Des. Appl. 2009, 6, 407–418. [Google Scholar] [CrossRef]
- Liu, J.; Ma, Y.S. 3D level-set topology optimization: A machining feature-based approach. Struct. Multidiscip. Optim. 2015, 52, 563–582. [Google Scholar] [CrossRef]
- Yeo, C.; Kim, B.C.; Cheon, S.; Lee, J.; Mun, D. Machining feature recognition based on deep neural networks to support tight integration with 3D CAD systems. Sci. Rep. 2021, 11, 22147. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Lee, H.; Mun, D. 3D convolutional neural network for machining feature recognition with gradient-based visual explanations from 3D CAD models. Sci. Rep. 2022, 12, 14864. [Google Scholar] [CrossRef]
- Stangl, T.; Wartzack, S. Feature based interpretation and reconstruction of structural topology optimization results. In Proceedings of the DS 80-6 Proceedings of the 20th International Conference on Engineering Design (ICED 15) Vol 6: Design Methods and Tools—Part 2, Milan, Italy, 27–30 July 2015; pp. 235–244. [Google Scholar]
- Amroune, A.; Cuillière, J.C.; François, V. Automated lofting-based reconstruction of CAD models from 3D topology optimization results. Computer-Aided Des. 2022, 145, 103183. [Google Scholar] [CrossRef]
- Sehmi, M.; Christensen, J.; Bastien, C.; Kanarachos, S. Review of topology optimisation refinement processes for sheet metal manufacturing in the automotive industry. Struct. Multidiscip. Optim. 2018, 58, 305–330. [Google Scholar] [CrossRef]
- Ibhadode, O.; Zhang, Z.; Sixt, J.; Nsiempba, K.M.; Orakwe, J.; Martinez-Marchese, A.; Ero, O.; Shahabad, S.I.; Bonakdar, A.; Toyserkani, E. Topology optimization for metal additive manufacturing: Current trends, challenges, and future outlook. Virtual Phys. Prototyp. 2023, 18, e2181192. [Google Scholar] [CrossRef]
- Marinov, M.; Amagliani, M.; Barback, T.; Flower, J.; Barley, S.; Furuta, S.; Charrot, P.; Henley, I.; Santhanam, N.; Finnigan, G.T.; et al. Generative design conversion to editable and watertight boundary representation. Computer-Aided Des. 2019, 115, 194–205. [Google Scholar] [CrossRef]
- Müller, R.; Kampschulte, M.; Khassawna, T.E.; Schlewitz, G.; Hürter, B.; Böcker, W.; Bobeth, M.; Langheinrich, A.C.; Heiss, C.; Deutsch, A.; et al. Change of mechanical vertebrae properties due to progressive osteoporosis: Combined biomechanical and finite-element analysis within a rat model. Med. Biol. Eng. Comput. 2014, 52, 405–414. [Google Scholar] [CrossRef]
- Lorensen, W.E.; Cline, H.E. Marching cubes: A high resolution 3D surface construction algorithm. ACM Siggraph Comput. Graph. 1987, 21, 163–169. [Google Scholar] [CrossRef]
- Oliveira, J.F.; Steed, A. Determining orientation of Laser scanned surfaces. In Proceedings of the 1st Iberoamerican Symposium in Computer Graphics SIACG, Guimeraes, Portugal, 1–5 July 2002; pp. 281–288. [Google Scholar]
- Rozvany, G.I.; Zhou, M.; Birker, T. Generalized shape optimization without homogenization. Struct. Optim. 1992, 4, 250–252. [Google Scholar] [CrossRef]
- Bendsøe, M.P.; Kikuchi, N. Generating optimal topologies in structural design using a homogenization method. Comput. Methods Appl. Mech. Eng. 1988, 71, 197–224. [Google Scholar] [CrossRef]
- Bendsoe, M.P.; Sigmund, O. Topology Optimization: Theory, Methods, and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Vlah, D.; Žavbi, R.; Vukašinović, N. Evaluation of topology optimization and generative design tools as support for conceptual design. In Proceedings of the Design Society: DESIGN Conference; Cambridge University Press: Cambridge, UK, 2020; Volume 1, pp. 451–460. [Google Scholar]
- Tagliasacchi, A.; Alhashim, I.; Olson, M.; Zhang, H. Mean curvature skeletons. In Computer Graphics Forum; Wiley Online Library: Oxford, UK, 2012; Volume 31, pp. 1735–1744. [Google Scholar]
- Bremicker, M.; Chirehdast, M.; Kikuchi, N.; Papalambros, P. Integrated topology and shape optimization in structural design. J. Struct. Mech. 1991, 19, 551–587. [Google Scholar] [CrossRef]
- Pakdel, H.R.; Samavati, F. Incremental adaptive loop subdivision. In Proceedings of the Computational Science and Its Applications–ICCSA 2004: International Conference, Assisi, Italy, 14–17 May 2004; Proceedings, Part III 4. Springer: Berlin/Heidelberg, Germany, 2004; pp. 237–246. [Google Scholar]
- FreeCAD Source Documentation. Available online: https://wiki.freecad.org/Source_documentation (accessed on 17 April 2023).
- Aoyagi, R.; Imai, R.; Rutqvist, J.; Kobayashi, H.; Kitamura, O.; Goto, N. Development of TOUGH-FrontISTR, a numerical simulator for environmental impact assessment of CO2 geological storage. Energy Procedia 2013, 37, 3655–3662. [Google Scholar] [CrossRef]
- FrontISTR ver. 5.4. Available online: https://manual.frontistr.com/en/ (accessed on 17 April 2023).

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Initial cylinder radius | 10 mm |
| Minimal Initial Element Size | 40 mm |
| Population | 5000 |
| Node Move Standard Deviation | 5.0 mm |
| Radius Change Standard Deviation | 1.0 mm |
| Input Mesh | Parametric Model | |
|---|---|---|
| Total Mass | 18.41 kg | 18.35 kg |
| Max von Mises stress on surface | Pa | Pa |
| Mean von Mises stress on surface | Pa | Pa |
| Max Deflection | 2.008 mm | 1.340 mm |
| Yellow Boundary | Blue Boundary | Red Boundary | |
|---|---|---|---|
| Load Case 1 | Force 200 N, vector Y = −1 | Force 200 N, vector X = 1 | support |
| Load Case 2 | Force 200 N, vector Z = 1 | support | Force 200 N, vector X = −1 |
| Load Case 3 | support | Force 200 N, vector Z = 1 | Force 200 N, vector Y = −1 |
| Parameter | Value |
|---|---|
| Initial Cylinder Radius | 1.0 mm |
| Minimal Initial Element Size | 3.0 mm |
| Population | 5000 |
| Node Move Standard Deviation | 0.2 mm |
| Radius Change Standard Deviation | 0.2 mm |
| Input Mesh | Parametric Model | ||
|---|---|---|---|
| Mass | 64.1 g | 72.4 g | |
| Load Case 1 | |||
| Max von Mises stress on surface | Pa | Pa | |
| Mean von Mises stress on surface | Pa | Pa | |
| Max Deflection at Force 1 | 0.82 mm | 0.78 mm | |
| Max Deflection at Force 2 | 0.61 mm | 0.62 mm | |
| Load Case 2 | |||
| Max von Mises stress on surface | Pa | Pa | |
| Mean von Mises stress on surface | Pa | Pa | |
| Max Deflection at Force 1 | 0.73 mm | 0.61 mm | |
| Max Deflection at Force 2 | 0.68 mm | 1.0 mm | |
| Load Case 3 | |||
| Max von Mises stress on surface | Pa | Pa | |
| Mean von Mises stress on surface | Pa | Pa | |
| Max Deflection at Force 1 | 1.6 mm | 2.29 mm | |
| Max Deflection at Force 2 | 0.96 mm | 1.28 mm | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Polak, J.; Nowak, M. From Structural Optimization Results to Parametric CAD Modeling—Automated, Skeletonization-Based Truss Recognition. Appl. Sci. 2023, 13, 5670. https://doi.org/10.3390/app13095670
Polak J, Nowak M. From Structural Optimization Results to Parametric CAD Modeling—Automated, Skeletonization-Based Truss Recognition. Applied Sciences. 2023; 13(9):5670. https://doi.org/10.3390/app13095670
Chicago/Turabian StylePolak, Jan, and Michał Nowak. 2023. "From Structural Optimization Results to Parametric CAD Modeling—Automated, Skeletonization-Based Truss Recognition" Applied Sciences 13, no. 9: 5670. https://doi.org/10.3390/app13095670