1. Introduction
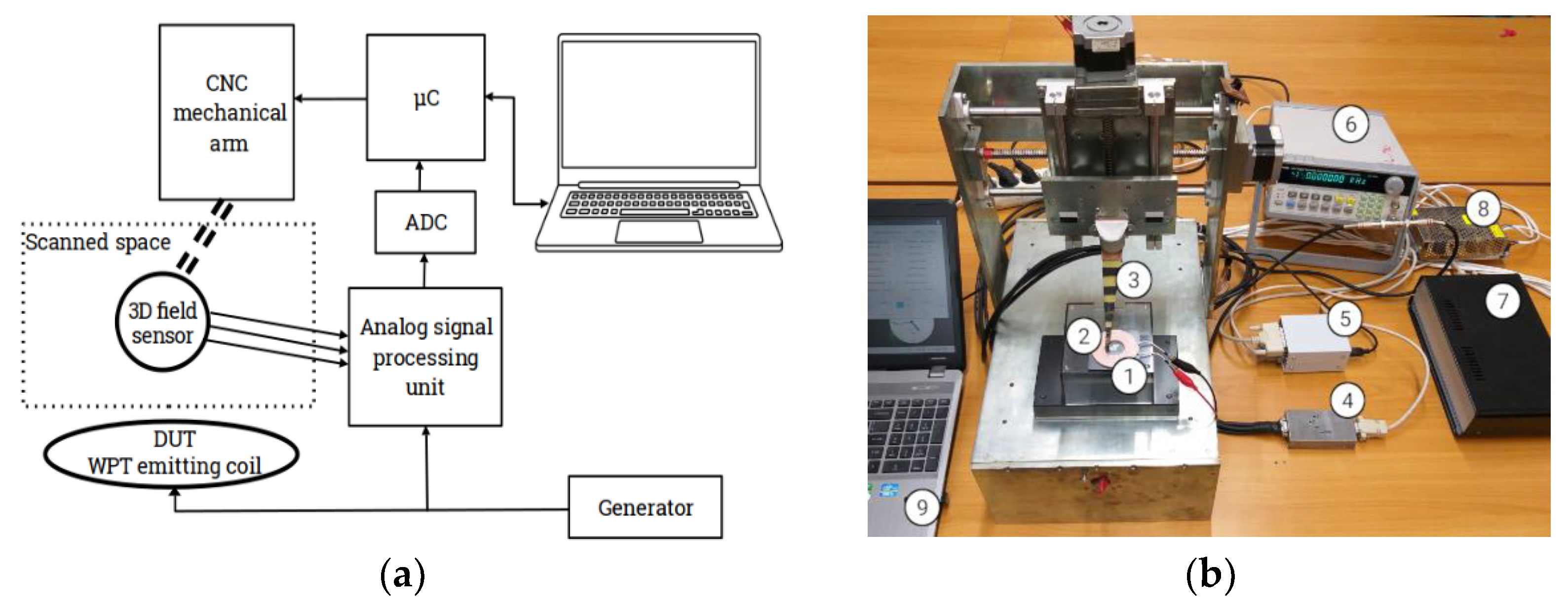
In our paper, we focused on the development of a high-precision measurement system that would allow us to identify the area of maximum intensity of the electromagnetic field generated by the emitter coil in the hemispherical space limited by the ferrite plate in a WPT inductive system. Of course, other methods of increasing the PTE (power transfer efficiency) have appeared in the literature [
1,
2]. A very widespread and applicable method is the insertion of metamaterials (MTMs) between the Tx and Rx coils [
3]. In contrast to this, we sought a concentration of the field lines resulting from the WPT geometry and not a redirection of the field lines using artificially designed metamaterials, as in the abovementioned articles.
The authors of [
4] contributed concrete information for those needing to carry out field measurements using three-axis coil probes and those engaged in measurement setup development. This study highlighted the errors that may occur by measuring magnetic fields using coil-based sensors if the field volume exceeds the size of three-axis coil probes/transducers and analyzed the sensitivity to relative source orientation.
Based on several investigations, the authors certified that the outlined methods could also be adapted to quantify proximity errors within the three-axis coil probe during measurement procedures for other field source topologies. We used a three-axis orthogonal sensor coil, but for a field generated by a WPT emitting coil rather than by a long line.
The EN 61786-1 standard [
5] provides guidance for the technical infrastructure used to measure the intensity of magnetic and electric fields up to 100 kHz. According to Part 1 of the abovementioned standard, which deals with measuring instruments, and Part 2, which deals with measurement procedures, three-axis coil probes, such as our 3D transducer, are recommended as common transducers. The standard presented in [
6] confirms that an isotropic field sensor can be designed using three orthogonal coils, which are distributed so that the measured field is similar to the field in the middle of a sphere enclosing the three orthogonal coils.
In the current paper, we followed these basic measurement principles, reproduced in worldwide accepted publications such as [
5,
6,
7]. In agreement with the abovementioned research, it was confirmed that, in any case, the angular compensation of the yaw, pitch, and roll are entirely necessary. Our method of measuring the angular deviations of the sensor coil axis did not use Helmholtz coils, as in [
7], but relied on the precise and stable positioning of the sensor in the proximity of the WPT emitter coil.
For the total control—direction and intensity—of the EMF, it is necessary to assure the constant excitation of the coil. Because this cannot be guaranteed for the entire duration of the scanning process, it is necessary to apply a correction procedure. In [
8], a calibration method was proposed using a distinct sensor placed in a fixed position, and the field intensity measured by this approach was used for the correction. In our study, we used the measured voltage at the emitter coil terminals as the reference signal.
The spatial field distribution is of interest not only in the case of WPT, but also for investigating the EMC of a DUT. This prompted researchers to use an automatic systems to guide the movement of the measuring probe in the space of interest. For this reason, in [
9], the proposal was to mount the probe on a mechanical arm with an electronic module that allowed 3D movements in space and the interpretation of the measured data according to the location. The solution for the WPT field proposed herein is like that presented in [
9], with the particularity that it covers a significantly larger space, and the information obtained allows the detection of not only the field intensity, but also the spatial distribution of the field lines.
Measuring the electromagnetic field in order to reduce the electromagnetic influences (EMIs) requires avoiding the disturbance of the measuring probe in the measured EM field. Because this goal cannot be assumed for any probe, the solution proposed in [
10] was to calibrate the measuring probe by placing it in a well-defined reference field.
Moreover, since the EMF influence can be different depending on the position, a multi-point analysis achieved by moving/translating the probe was proposed [
10]. Benefiting from the case of the analyzed planar emitter coil fed by a constant frequency and the spatially symmetrical micro-construction (2.5 mm radius) of the measuring head described in our paper, its influence on the measured field was practically negligible.
Researchers know that the accuracy of field measurements depends on the probe/transducer geometry, the transmission line features, and the signal processing circuit. How much the probe dimensions (loop and wire radius) affect the final results and how to determine the additional correction of the probe calibration factor were investigated in detail in [
11,
12,
13]. Note that the concept described in [
13] was based on the scalar compensation, while the concept developed herein is different and includes a vector calibration (module, direction, and sense).
The system sensitivity (S) was defined in [
14] as the derivative of the metric M (mean value or an RMS value) with respect to one relevant input parameter
p. The authors used optimization algorithms to improve the S value of the electronic oscillator circuit in order to increase the performance of a three-coil metal detector. The signal path of the metal detector included the classical components, such as a signal generator; EM-coupled coils; a digital amplifier; an oscillator; and a detector (filter, rectifier, oscillator), which generated the final marker signal (acoustic signal to the loudspeaker).
Based on a similar pattern, in our work we proposed a signal path containing partially identical modules (signal generator, coupled coils, differential amplifier); however, in the proposed structure, we inserted rms-to-dc conversion and ADC modules, which delivered the final digital value. In this way, we ensured a unique and linear relationship between the input current in the WPT emitter coil and the digital sequence at the output.
As another approach using the instantaneous Poynting vectors, the authors of [
15] investigated the space- and time-dependent characteristics of the power and energy flux. The conceptual difference in our proposal was that our experimental structure was composed of a 2D emitter coil and a 3D sensor coil rather than two similar coils, Tx and Rx. The spatial measurements were conducted in all three orthogonal directions, H
x, H
y, and H
z, not only in the plane.
Our approach to calibration procedures for spatial radiation measurements differed from other methods [
16,
17] because it included segmented signal path calibration from the 3D-OSC to the display.
2. The Measuring Procedure
In a WPT system with inductive power transfer, the distribution and intensity of the electromagnetic field in the space between the transmitter (emitting coil) and the receiver coil and in the space adjacent to it directly depends on the current intensity in the coils. To establish the appropriate investigation methods, in the first stage it was sufficient to study a situation wherein only the WPT-EC and its functional circuits were in operation.
Of course, this did not exclude the need to check if the identified methods were valid for real situations, because the whole system influences the field configuration.
In this simplified, perhaps idealized situation, the EMF characteristics (such as the modulus, direction, and orientation of the EMF strength vector at each point) generated by the emitting coil depend on the current value in the coil. However, if this current is high enough that the intensity of the generated magnetic field reaches the magnetic saturation zone of the ferrite structure (a basic component of the WPT-EC), then the field lines may change due to the non-uniformity in the ferrite material.
Avoiding the proximity of the saturation zone to the WPT operation is, moreover, an important requirement of WPT system design. Non-compliance with this constraint causes increased power losses and decreased efficiency.
Measuring an EMF to accurately determine its spatial distribution requires the accepted measuring device to have a sufficiently large dynamic range. Correlated with limiting the EMF to avoid ferrite saturation is the need to perform sufficiently accurate measurements in the low-field-strength area. This task should be executed very carefully.
It is known that the intensity H and, implicitly, the density B (induction) of the magnetic field at a certain point in the WPT space depend linearly on the feed current in the emitting coil.
This physical phenomenon makes it possible to determine the EMF configuration by exciting the emitting coil with an alternating sinusoidal current, regardless of the current waveform in normal operation (in the SOA—safe operating area) of the WPT system. However, the signal frequency applied should be close to the WPT operating frequency; otherwise, the field may be distorted due to the frequency behavior of the ferrite material.
A measurable electromagnetic voltage (EMV) is induced in a wire, limiting a surface located in the non-constant WPT fields. If this surface delimits a small enough area compared to the transmitter dimensions (small enough that the field is approximately constant at every point on this surface), then the value of the induced EMV can be used as an indicator for the field strength at the center point of the surface, as will be seen below.
The EMV
e, induced in a single turn located in the WPT field, can be calculated with:
Φ is the magnetic flux passing through the turn surface:
where the vector
h is the instantaneous magnetic field intensity;
μ is the magnetic permeability in the environment where the WPT system operates (the air)—very close to the magnetic permeability of the vacuum
μ0; and
s is the normal vector at the surface.
Assuming that the field intensity vector
h is constant on the turn surface,
Φ becomes:
where
h is the instantaneous modulus value of the magnetic field vector in the coil center point, and
φ is the angle between the vector
h and the normal direction at the coil surface
S.
At the virtual point in the turns center, the vector
h is proportional to the instantaneous intensity of the supply current in the emitting coil, which is sinusoidal in time, and so:
where
H is the peak value of the EMF strength vector modulus, and
ω is the current pulsation of the emitting coil.
Hence, the induced EM voltage
e and the effective value of the induced voltage
E are:
Note: if several turns are used instead of a single turn in a measuring coil, made so that the length is much smaller than the turn diameter, then the proportionality relationship remains valid, but the E value is multiplied by the number of turns. This technical solution must be adopted to increase the induced EMV, so that very small field values can be harvested with sufficient precision. The accuracy provided by this solution was evaluated.
Assuming that under the measurement conditions, the S and ω values are constant, it follows that:
The coil-induced EMV is proportional to the projection of the EMF strength (it is over time peak value) in the coil normal direction;
The involved proportionality constant is independent of the coil central position in the EMF and the normal orientation to the coil.
These two statements introduce the measuring setup for the EMF intensity vector, both as a magnitude and as a direction, namely: the successive placement of the coil (in fact, the coil with several turns, i.e., the coil transducer) at the same spatial point, but with the normal axis oriented in three directions perpendicular to each other, and the measurement of the three EM voltages provided. These values of course represent the H vector projections on the three axes.
An alternative solution is the variant with three coils placed around the same central point, oriented perpendicular to each other, and the simultaneous measurement of the three induced voltages, as in
Figure 1.
It is noted that the position of the other coils, which measured the induced EMV in the same space, near to the active coil did not influence the measurement results, because copper’s relative magnetic permeability is very close to unity.
3. Magnetic Field Intensity Measurement
The experimental measurement of the three induced EMVs had to comply with the requirements adopted according to the purpose of this paper, namely, to allow the spatial distribution (magnitude, direction, orientation) of the EMF generated by the WPT-EC. The compliance with these requirements was the key element in the investigations contained in this article.
Two aspects of global action were focused on: the accurate positioning of the measuring head, which included the three orthogonal coils (the coil transducers), and the effective measurement of the induced EMV.
From the point of view of the measurement operation, the noise, i.e., the parasitic influences that affected the obtained numerical values, could not be neglected. This effect could not be completely eliminated, its existence being mainly due to the behavior of the electronic circuits used in the measurement process and the electromagnetic influences of other perturbations near the active area, which were not related to the measurement. In terms of the electronic components, the noise levels specified in their data sheets had to be considered, and from the point of view of electromagnetic disturbances, some efficient shielding solutions were adopted:
The connections from the 3D field sensor were twisted and shielded;
The analog processing board of the three signals from the sensor coils was encased and shielded;
The three induced EMVs in the same analog processing board were not processes simultaneously, in order to avoid the interference between signal channels.
The measurement of the induced EMVs in the three coils with perpendicular axes (the three OSCs) had to be carried out with sufficient accuracy, so that the determination of the field distribution was not affected. We determined experimentally that it was necessary to measure very low effective values, of the μV order; consequently, the dynamic range of the induced EMVs had to be large enough. This was necessary both to detect values at long distances from the WPT and to correctly detect values near the transmitter, but in directions with considerable deviation from the axis normal to the coil surfaces.
Another technological option would be to switch the elements inserted on the amplification path for range switching, which would solve the effective measurement issue, yet the input circuits issue in the amplification chain would remain.
The viable alternative was that the induced EMVs were acquired by means of special amplifiers (designed with dedicated operational amplifiers for precision instrumentation), with the input impedance set as high as possible. Moreover, analog-to-digital converters obviously had to be involved in the signal processing path. Their resolution needed to be as high as possible, but a compromise solution would be that 15 bits were enough (32,768 distinct sequences).
The tests performed led us to adopt a compromise solution that ensured sufficiently accurate measurements so that the exact EMF distribution was determined.
As a consequence, we designed a measurement solution for the sinusoidal input signal, considering amplification, low-pass filtering, high-frequency sampling and quantization on a large bit number and we inserted for noise reduction, the digital filtering at the path end. The solution involved ADCs working at a sampling rate much higher than the working frequency of the WPT (125 kHz) with sufficient accuracy for the required dynamic range, e.g., 16-bit quantization (15 bits for value and 1 bit for sign).
The solution adopted in this paper was a compromise solution, which, as will be seen, ensured that the measurement was accurate enough to determine the structure of the field.
This method has the following advantages:
The “effective value to dc voltage” (rms-to-dc) conversion module includes a mediation/integration element, which makes the measurement less sensitive to HF noise;
It is near to the operating point of the WPT system, given that the signal waveform may not be ideally sinusoidal, and the field structure harmonics may be different due to the frequency behavior of the involved ferrites.
The above scan-measurement procedure is valid if the following conditions are met:
The “deviations of the coil axis” are measured in relation to the orthogonal directions of the operation space (in Cartesian coordinates) based on the measured EM voltage.
An “amplification correction” is performed on each channel at the level of the first stage of the measuring path, because a difference between the real square of the three coils is inevitable.
A “linearity correction” is implemented to preserve the proportionality intensity and the digital sequences resulting from the measurement, given that the nonlinearity of the induced voltage measurement is inherent to the required dynamic range.
A “field sense detection” algorithm is applied. Just measuring the induced EMF value only is not sufficient, as it represents the magnitude (modulus) in the normal direction to the coil surface.
A “slow variation compensation” mechanism is used to minimize the measured value errors caused by the parameter changes in the analog path, due to slow-evolution random factors, mainly thermal deviations (because a scanning process may take several hours).
A “geometric correction” is applied to determine the orthogonal components of the EMF given that the normal directions of the coils have small deviations.
A measurement validation solution is developed using certified equipment.
3.1. Measurement of Deviations from Normal Directions to the Sensor Coil
By measuring the induced EMV in the three sensor coils, the magnitude projections of the EMF intensity vector H in the directions normal to them were obtained. The H measurements in Cartesian coordinates could only be used directly if the normal directions of the coil surfaces corresponded to the Cartesian coordinate directions, which is rare in practice because of sensor construction technology. For this purpose, the ultimate solution was to place each coil in an EMF with a known direction so that this direction successively corresponded (independently for each coil) to the two directions contained in the coil plane (and approximately perpendicular).
If a minimum of the two induced EMVs was obtained through this location in space, then the normal line to the coil surface would be perpendicular to these two directions.
The measurement procedure, presented in
Figure 3, consisted in the rotation of the emitting coil around an axis parallel to an axis of the Cartesian coordinate system, keeping the sensor coil in the center of the emitting coil. The rotation of the emitting coil aimed to minimize the induced EMV in the sensor coil. The minimum value was not zero due to the noise introduced in the measurement process.
At the δ angle, for which the minimum voltage was obtained, the normal axis of the emitting coil was thus perpendicular to the normal axis of the sensor coil (assuming that in the center of the emitting coil the EMF was perpendicular to the coil surface).
It followed that the axis (normal to the coil surface) deviation of the sensor coil corresponding to the Z axis of the coordinate system in the Y direction was εzy = δ. The deviation was considered positive if it was in the positive direction of the Y axis and negative in the opposite direction. The deviation from the Z axis in the X direction, εzx, could be obtained in a similar way. For the X and Y sensor coils, the deviations εxy and εxz and εyx and εyz, respectively, were similarly obtained.
The deviations were measured using this procedure. The following values were obtained:
3.2. The Amplification Correction
Obtaining a more accurate picture of the EMF structure, in terms of both intensity and direction, involved the similar measurement processes for each of the three sensor coils (OSCs).
Since the field values were very low, it was necessary to amplify the induced EMVs by different factors to compensate for the coil surface differences. On the other hand, it was useful to share as many elements as possible from the measurement chain.
The solution was the distinct and adjustable amplification AX, AY, and AZ for each input coil signal, followed by analog multiplexing, as shown in
Figure 4.
To obtain similar responses to similar fields for the three coils X, Y, and Z, the emitting coil was placed successively for each coil so that the center of the emitting coil was in the center of the sensor coil, and the normal axis of the emitting coil surface corresponded to the normal of the sensor coil, according to the previous point.
Because the input excitation from the emitting coil was the same in all three situations, this configuration ensured the same field for each coil. The AX, AY, and AZ amplifications were adjusted so that the numerical output value was the same. Considering that, due to random factors (noise), the numerical values were not identical for each measurement, the average of several successive values was used for these settings.
The adjustments applied according to the method presented above provided the advantage that the common elements in the measuring chain acted in a similar way for the three EMVs, so that the ratio between the measured numerical values was proportional to the ratio between the field strengths.
3.3. Linearity Correction
Before making any corrections to the measured values, it was recommended to check that the measurement process did not transpose the ferromagnetic core of the emitting generator near to the saturation zone. If the high instantaneous values of the electric current intensity in the coil produced an intensity of the magnetic field H close to the intensity of the saturation field HS, then the induction B in the core would no longer be proportional to H in these areas. This would mean a decrease in the inductance and, as a result, a decrease in the impedance of the coil connected to the sinusoidal voltage generator.
One way to check this was to supply the coil with a sinusoidal voltage and measure the actual values of the impedance (indirectly through coil voltage and current measurement). The location of the core away from the saturation zone was indicated by the fact that the impedance did not change when the voltage changed in the emitting transmitter coil.
To put this to the test, the WPT emitting coil was fed a 95 kHz sinusoidal signal (chosen according to the voltmeter accuracy), as shown in
Figure 5 and
Figure 6.
The current value was measured by the voltage drop in a 1 Ω calibrated shunt, and the voltages V1 and V2 were measured with a precision multimeter. The multimeter input impedance in the measurement ranges applied (1 MΩ and <100 pF) was much higher than the circuit impedances, so the systematic measurement error could be neglected.
The multimeter provided (according to the data sheet) an accuracy of 0.15% of the measured value, resp. + 0.05% of the measuring range, for the measurement of alternating sinusoidal voltages up to 100 kHz. For the measured value ranges (2 to 3800 mV for V1 and 0.1 to 350 mV for V2), the result accuracy was over 0.28% of the measured value.
Thus, for the impedance of the WPT-EC (as a ratio between the voltage V1 and the current V2/RS), we obtained an accuracy higher than 0.56% of the measured value.
The impedance diagram of a current trip in the range considered (
Figure 7) shows that the impedance of the WPT emitting coil ranged between 11.7 and 11.8 Ω (the differences were within the measurement accuracy limits), while there were no significant changes under high current values that could denote proximity to the core saturation zone.
In general cases, a measurement involves the existence of an injective function that ensures the proportionality between the measured quantity and the resulting numerical values over the whole measurement range. If this function does not provide linearity or at least proportionality between the actual field input and the numeric output, then there is the option of adjusting the numerical output values using a correction function.
The linearity and, moreover, the proportionality of the original function could not be fulfilled with certainty, due to the general-purpose electronic components. Therefore, the viable solution consisted in identifying the correction function that was applicable after obtaining the numerical values and would finally ensure proportionality.
According to the signal processing path presented in
Figure 8, the measurement of EMF intensity required the linearity of tasks II, III and IV.
Because there was linearity between the current in the WPT emitter coil and the induced EMV in the sensor coil (a fact verified by measuring the voltage drop in the 1 Ω shunt), the procedure for identifying the correction function included the whole processing path (tasks I–IV) by supplying the generator coil with an increasing current. This approach had the advantages that the voltage values were in a more easily measurable range, and there was an adaptation between the sensor coil and the amplifier.
The operation area outside the saturation area led to the conclusion that the induced EMV in the sensor coil was proportional to the current in the emitting coil (as an r.m.s. value, measured by the voltage drop in the 1 Ω shunt). This fact was verified by measuring the induced EMV in the sensor coil—located very close to the center of the WPT-EC. The validation of the linearity function was carried out based on the investigations summarized in
Figure 9.
The current variation required in the emitting coil (IWPT), according to the 15-bit digital range and with the EMV amplifier set to a median position, was 50 μA–1 A. Because the multimeter ensured sufficient accuracy only for an AC voltage greater than 1 mV (corresponding to an IWPT = 9.4 mA), the signal linearity of the current in the EC with the induced voltage in the sensor coil was checked only for a current higher than 10 mA.
Assuming that the relationship between the WPT-EC current and the induced voltage in the sensor coil (I
WPT → U
EMV) corresponded to a linear function with a proportionality constant, the relative differences in the measured values of the EMV related to this function (variable deviations due to multimeter accuracy) were as depicted in
Figure 10. The differences identified (∆U
EM = −0.16% ... + 0.59%) ranged within the measurement errors, which confirmed the assumed linearity.
Taking this into account, the solution could be to place the sensor coil in the EMF in a fixed position, excite the WPT-EC using an adjustable sinusoidal voltage source, and measure the current intensities. Because the numerical findings obtained from the measurements were within a wide range (due to the big number of ADC bits), the solution of using currents in a geometric progression may be appropriate.
As the linearity correction function had to be applied to the numerical values resulting from the measurement process, a suitable solution was to correlate it based on a table. This table contained numerical values that expressed the correlation:
where
n is the measured value;
I is the current in the emitting coil that led to the
n value; and
k is a constant, valid for all ranges of the current values.
The choice of the k constant was arbitrary, but the numbers had to be in approximately the same range as the n numbers (represented by the same bit number).
In the process of effective EMF measurement, the algorithm of linearity correction was implemented by linear interpolation, based on the abovementioned table.
For this reason, two more converters were inserted into the signal processing path, namely rms-to-dc and AD converters. According to the data sheet for the rms-dc small signal converter [
18] (
Figure 11), it was observed that for an input signal dynamic range of only 1:1000 (between 3 mV and 3 V) at 150 kHz, the accuracy was lower than +/−3 dB.
The subsequent AD converter [
19] provided at 15 bits a range of 1:32,678 with nonlinearity, as displayed in
Figure 12. The measurement error for the AD converter was therefore much smaller than that introduced by the rms–dc converter 10
−3.
In conclusion, the main nonlinearity source was introduced by the rms–dc analog converter, and the globally applied linearization procedure provided good enough data for the purpose of this study, namely, to determine the spatial EMF distribution (magnitude, direction, orientation).
The diagram presented in
Figure 13 shows the evolution of the linearity correction value (corrected via measured values), obtained by correlating the values of the current in the WPT-EC with the numerical values obtained at the output of the analog-to-digital converter using the procedure described above. The constant factor k (rel.%) ensured the numerical value correspondence at 16,000 is equivalent to 1V for the AD converter set at a full-scale rate (FSR) of 2.048 V.
The initial idea was to scan the EMF produced by a sinusoidal current in the WPT-EC at frequencies of 100 kHz and 150 kHz. Due to the constructive limitation of the maximum generator power at a frequency around 100 kHz, the EMF strength was insufficient for traceable measurement, so a slightly higher frequency of 104 kHz, which allowed clear measurement without compensating for the inductance of the EC, was used.
The graph in
Figure 13 and
Figure 14 was constructed for measured values in the range 17–32,768 (15 bits). Values lower than 17 were not measured. The nonlinearity was obvious when the ratio of source values to measured values was represented graphically according to the measured values. The graphs in
Figure 14 show the different ratio evolutions up to the numerical value of 500, as well as the relatively constant evolution for values measured between 500 and 20,000, which corresponded to voltages between approximately 37.5 mV and 1.25 V (considering the 15-bit ADC with a 2.048 V FSR). Different behavior was observed at 104 kHz compared to the 150 kHz frequency.
Using the global measurement configuration presented here, we experimentally demonstrated that successive measurements differed by a maximum of +/−0.2% from the single measured value. Through the solution adopted in this study for averaging between 10 consecutive measurements, a maximum variation of 0.05% was finally obtained.
If the supply voltage of the WPT-EC was 0 V, then the measured numerical value was around 14, a value generated by the inherent noise in the measurement process (provided by the electronic components and the EM disturbances). This revealed why, in the analysis, there were only values greater than 14, and it explained the graph shape in the area of values between 17 and 25.
Even if the measurement accuracy was lower, in the area of numerical values less than 30, the linearization process described above compensated for this, practically minimizing the noise influence. Since these values were measured at the edges of the WPT workspace only, the errors did not affect the correct determination of the EMF spatial distribution.
3.4. Field Orientation Detection
The measurement of the induced EMV in the coils of the 3D sensor was not enough to determine the EMF, because it only established the magnitude (modulus) of the field strength, and not the field sense. This could be determined from the phase shift—in the phase or antiphase—between the induced EMV in each coil of the 3D sensor and the WPT emitting coil voltage.
The solution for determining the phase shift (0
0 or 180
0) was to measure, at the same time as the induced EMV (U1ca), the sum of the induced EMV and the WPT voltage (also via an rms-to-dc converter), as shown in
Figure 15.
The phase detection procedure (phase/antiphase) was carried out according to the following algorithm:
Switch I opens; voltage U1CA and U1CC are near to 0 V (only a small value due to component noise).
The amplification in A2 is adjusted so that the voltage U3CC (resulting only from the signal at the WPT emitting coil) is approximately half-scale.
The value of the U3CC voltage is stored.
Switch I is closed; the voltage U1CC represents the induced EMV.
A threshold level “UP” is calculated as the maximum value between the stored voltage value U3CC and the voltage value U1CC.
The voltage value U3CC is compared with the threshold; if U3CC > UP, then it is concluded that the signals are in phase and vice versa.
The procedure described above had the advantage that it correctly determined the phase in the conditions under which the induced EMV swept the entire accepted dynamic range, and it did not generate errors even if the induced EMV was very small (or surrounded by noise).
3.5. Slow Variation Compensation
Determining the EMF distribution required that we not change the WPT emitting coil voltage or the measurement process parameters during the scanning process.
Given the large number of measurement points (>100 k pts.), the duration of the scanning process could be estimated at several hours. For a short lapse of time (for example, during the switch to measure the field components in the three directions), we could see that the process parameters were constant. However, during the full scanning process we observed their modification, mainly due to temperature variations or/and the supply voltage. These changes were considered slow variations, and during the scanning process these deviations had to be compensated for by adjustment.
It is known that slow temperature fluctuations can affect the operation of amplifiers, rms-to-dc converters, and digital-to-analog converters.
For the amplifiers, due to their AC mode of operation, the variations were due to the thermal drift of the resistors that determine the amplification. For the resistors used herein, with a metal film, the temperature coefficient was +50 ppm/°C. However, the amplification did not change, as it was determined by the ratio of implied resistance (with a similar temperature coefficient).
The data sheet of the rms-to-dc converter specified a temperature variation within the conversion accuracy of +/−1 mV +/− 0.005% of the converted value for each Celsius degree, while the AD converter data sheet showed the gain variation pattern presented in
Figure 16.
Consequently, the converters could introduce (for rated voltage values between 0 and 2 V) global variations of less than 0.03% at a full-scale rate (FSR). These errors fell into the range of slow variations that were compensated for by applying the algorithm. The solution adopted in this paper was to make both linearity correction and slow variation compensations after the scanning process.
The field sense detection involved in two steps, with the switch I in
Figure 15 open and then closed. As the duration of these steps was very short, and the measured values were stored, the block diagram could be functionally redrawn, as in
Figure 17 (including the analog-to-digital conversion).
In the diagram, UG is the voltage at the terminals of the emitting coil of the WPT, NG is the number associated with the measurement of UG, UI is the induced EMV in the sensor coil, and N is the number associated with the UI measurement.
Both
N and
NG were corrected for linearity using the algorithm described above, resulting in the new
NCG and
NC numbers. Thus, they were proportional to
UG and
UI. Hence,
where
gG and
g are the proportionality constants.
Due to the physical phenomena that brought about slow variations, the numbers
NCG and
NC were modified in the scanning process, i.e., they could be expressed as:
where
fG and
f are slow variation factors that were affected by the phenomena. If the conversion circuits from the block diagram in
Figure 17 were from the same series and mounted in the same enclosure (same operating temperatures), then it could be approximated that
fG =
f.
The induced EMV
UI depended on the sensor coil placement in the EMF and, proportionally, the current fed into the WPT emitting coil. Hence,
where
IB is the current and
p is the proportionality factor derived from the position of the sensor coil.
Because (given
Z as the impedance of the WPT emitting coil)
it resulted that
As we could approximate that
fG =
f, it resulted that
In other words, for the sensor coil placed at the location where the field was measured, the number resulting from the induced voltage measurement NC was proportional to the number representing the WPT emitter coil voltage (the same output number used for the sense detection process).
These items included the compensation solution—on the one hand for the slow variations in the electrical characteristics of the electronic components from the measuring chain, and on the other hand for the slow variations in the WPT generator coil voltage—according to the following algorithm:
Before starting the scanning process, the amplification A2 is adjusted so that the field sense can be detected.
The input of the induced EMV in the sensor coil is disconnected (using software) so that only the generator voltage is measured at the ADC output.
The numerical value from the ADC output NG is corrected for linearity to obtain the NCG numerical value.
The NCG value is stored as a reference value.
In the scanning process, the NCG value is measured in addition to the induced EMV in the sensor coils, and if it differs from the stored reference, then the corresponding numerical values of the induced EMV are corrected proportionally.
By using the algorithm described above, the field measurements were not affected by the slow variation phenomena that occurred during the scan, including the input voltage changes in the WPT generator.
3.6. The Geometrical Correction
The numbers resulting from the induced EMV measurement in the sensor coils represented the values of the EMF intensity vector as projections in the directions of the axes of the sensor coils. Because these directions had small deviations from the directions in orthogonal Cartesian space, it was necessary to correct the measured values.
Given that the three measured numbers (for the induced EMV in the sensor coils) represented the intensity of the EMF (HBX, HBY, HBZ), it was necessary to determine the components of these vectors in the Cartesian orthogonal space.
For the case of the Z component, the
HBZ vector together with the deviations from the Z axis, ε
zx and ε
zy, are shown in
Figure 18.
The measured value of
HBZ represented the modulus of the vector:
with
i,
j, and
k being unit vectors in the Cartesian system.
The following relationships could be written:
The coordinates of the
HBZ vector peaks were thus obtained depending on the deviation angles:
Similarly, for the vectors HBX and HBY, the coordinates in Cartesian space were (the relations were valid if the angles were negative): AX, BX, CX, AY, BY, and CY.
Because the vectors HBX, HBY, and HBZ represented the projections of the EMF intensity vector H on the sensor coils axes, the H vector peak was at the intersection of the planes perpendicular to the vectors HBX, HBY, and HBZ and containing their peaks.
A plane perpendicular to any vector, represented by Cartesian coordinates, can be written as follows:
and a plane containing the points (
x0,
y0,
z0) can be represented by
By implementing mathematical logistics and applying this equation for the vectors
HBX,
HBY, and
HBZ, the following system of linear equations was obtained (the free terms are the module square of each vector):
The solution of this linear equation system represented the coordinates in the Cartesian space of the EMF intensity vector
H at the placement point of the sensor:
where Δ, Δ
X, Δ
Y, and Δ
Z are the determinants of the system (Cramer rule).
The EMF of intensity H is, in fact, the field that produces the electromotive voltages in the sensor coils. This is different from the HB intensity field, which results from measurements when the deviations of the coil axes are not considered.
To investigate how important the geometric correction was, the field generated by a WPT emitting coil was scanned at 106,641 points, and the induced EMVs in the sensor coils were acquired and stored. After the linearity and axis deviation corrections (with the measured deviation values described in
Section 3.1), the differences in the
H vector’s magnitude obtained by applying the correction algorithm were calculated for each scanned point. The statistical findings are presented in
Figure 19.
It was found that the maximum error of the EMF magnitude (modulus), introduced by the axis deviations of the sensor coil, ranged between −7% and +7.7%, while around 55% of the measurements had a less than 3.5% error. The higher number of negative errors was due to the correlation between the deviations.
The angular differences in the
H vector direction obtained by applying the correction algorithm were also calculated for each scanned point. The statistical results are presented in
Figure 20 and confirmed that the field direction errors were less than 6°.
Of course, the results shown in
Figure 19 and
Figure 20 were valid for the set of 106,641 captured values in the case of a particular WPT emitter coil. For another coil (generating a different field, for which, from a statistical point of view, the ratios between the sizes of the field components in the three orthogonal directions are different) the statistical distribution of the errors to be corrected may be slightly different. However, the maximum error correction values did not exceed the values shown in
Figure 19 and
Figure 20, because these maximum values were due to the deviations in the sensor coil axes (measured according to
Section 3.1) and not to the field structure.
The effectiveness of the geometric correction depended on the accuracy of the measurements regarding the deviation of the coil axes from the Cartesian coordinate system. Errors in the measurement process differed from point to point because the measured values for the three axes are closely correlated with their deviations.
To statistically investigate the importance of deviation measuring, we simulated a geometric correction for a case in which the axis deviation was incorrectly measured by 0.5°, i.e., for the following deviations:
Here, εzy was smaller (the true value being εzy = 3.3°).
The differences between the geometric corrected values, considering the correctly measured deviations, and the geometrically corrected values, taking into account the incorrect measured deviations, are shown in
Figure 21.
It was concluded that following an erroneous correction, due to an incorrect deviation measurement, errors in the measured EMF strength up to 0.7% and direction up to 0.6% were generated.
In conclusion, the geometric correction method described above ensured a correct EMF measurement with more than 0.5° accuracy.
5. Discussion
A WPT generator coil produces a constant magnetic field if it is excited with a direct current. This field can be measured with chips currently available on the market, for example, QMC5883L [
22]. Unfortunately, the field structure thus obtained does not correspond to the normal operating situation of the WPT, mainly due to the magnetic remanence of the ferrite.
The compensation of the slow variations in the electromagnetic field due to the generator was achieved in [
8] by measuring the field in a fixed position and applying the corrections accordingly. However, as we demonstrated in
Section 3.5, for this purpose it is sufficient to measure the voltage excursion at the coil terminals. The obtained information is similar—for the specific case of the WPT field—to that generated by a separate sensor, with the advantage of methodical simplicity.
The magnitude of the EMF intensity produced by the WPT depends on the supply current in the emitting coil. The field lines do not change. In other words, the H vector direction at any point in the near-WPT space (or the ratio of the vector projections on the three orthogonal axes) does not change if the current excitation is different. Additionally, the ratio between the intensities of the EM field generated at any two points does not change.
To conclude, to ascertain the spatial field configuration for a given excitation of a WP generator coil, it is enough that the ratios of the measured EMF values between adjacent points are correct.
By applying the above corrections, the accuracy of the measured value ratios is ensured, provided that the currents in the WPT coil are correctly measured.
Having obtained correct values, the measured EMF structure (the modulus, direction, and orientation of the EMF intensity vector at all points) corresponds to the real structure.
Consequently, measurement validation with certified equipment (which, in fact, would only be used to confirm the ratios between intensities) is not necessary.
In [
4], the authors calculated the errors when measuring the electromagnetic field generated by a long line or two parallel lines. They demonstrated that by reducing the ratio between the radius of the sensor coil and the distance at which it was located, the errors were reduced. They concluded that these calculation methods could be adapted for other topologies.
Our research aimed to measure the field generated by any WPT emitter coil, so the error calculation methods should be adapted for each case. However, for the sensor coil radius of 2.5 mm used herein and a WPT emitting coil with a radius of tens of millimeters, the errors estimated by [
4] were less than 1%. Reducing the radius of the sensor coil unfortunately reduces the induced electromagnetic voltage, affecting the signal-to-noise ratio. That is why it will be necessary, in subsequent research, to improve the analog signal processing unit.































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}