
Steady-Speed Traffic Capacity Analysis for Autonomous and Human-Driven Vehicles



Abstract
:1. Introduction
1.1. Background
1.2. Study Objectives and Overview
2. Experimental Campaign
- Subaru Levorg: The Subaru Levorg was selected to represent a vehicle equipped with a camera-based ACC sensor (Eyesight). The front-mounted position of Eyesight allows the sensor to capture a wide range of visual information, including traffic conditions, lane markings, and potential obstacles, ensuring the ACC system’s ability to make informed decisions in real time.
- Volvo XC40: The Volvo XC40 was selected as a representative vehicle with a combined ACC sensor system, utilizing both camera and radar technologies. While cameras are adept at identifying visual cues, such as lane markings and traffic signs, radar excels in measuring the distance and speed of objects. This dual-sensor setup aims to provide a more robust and comprehensive approach to ACC.
- VW e-Golf: The VW e-Golf was included in the experiment to showcase a vehicle relying solely on radar-based ACC sensor technology. Choosing the electric VW E-Golf for this experiment not only diversifies the pool of ACC-equipped vehicles but also underscores the adaptability of ACC technology to electric platforms in which different sets of dynamics are presented.
3. Methodology
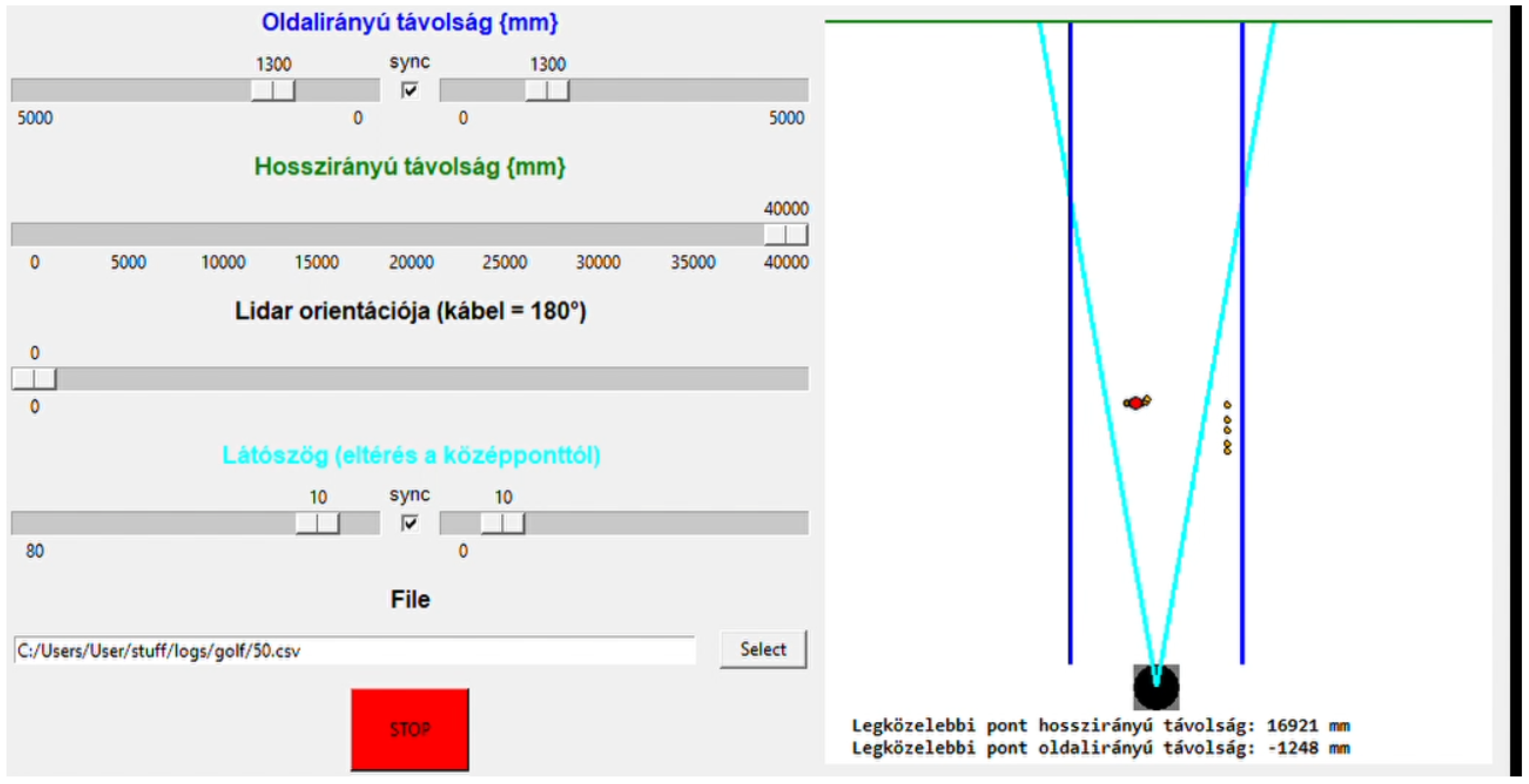
3.1. Data Collection
3.2. Steady Speeds and Applied ACC Settings
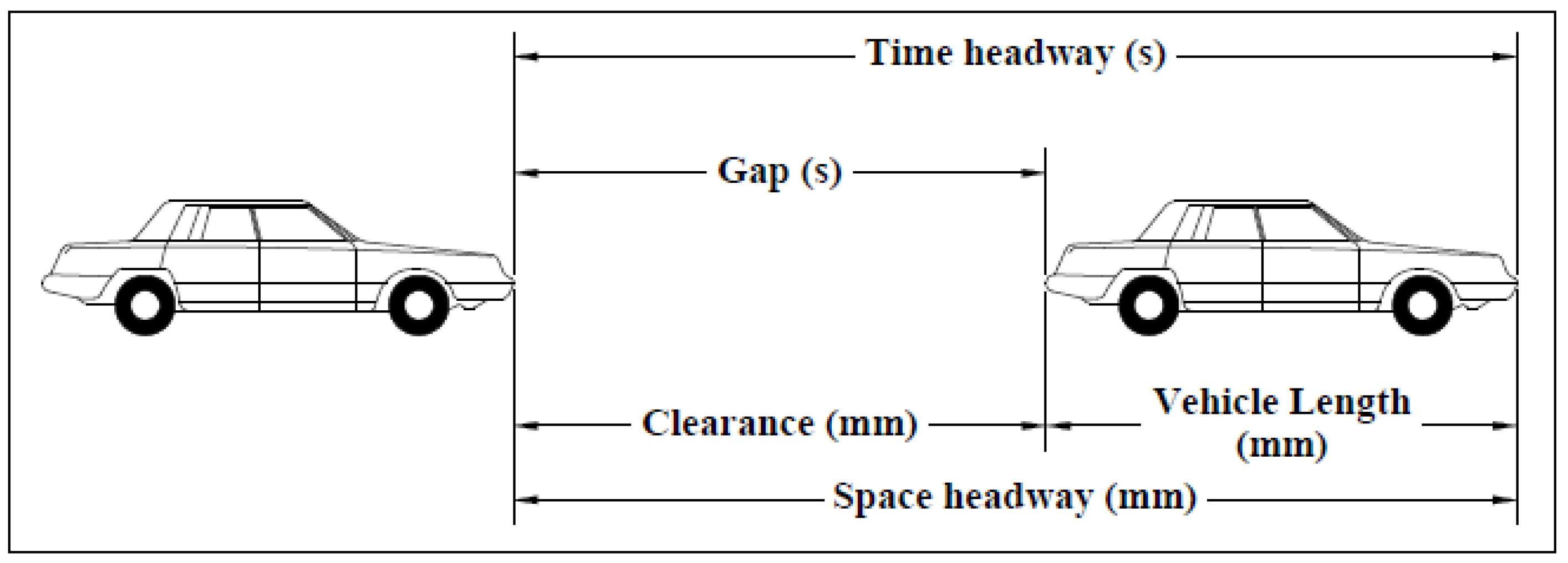
3.3. Calculation of Traffic Flow Parameters
4. Results
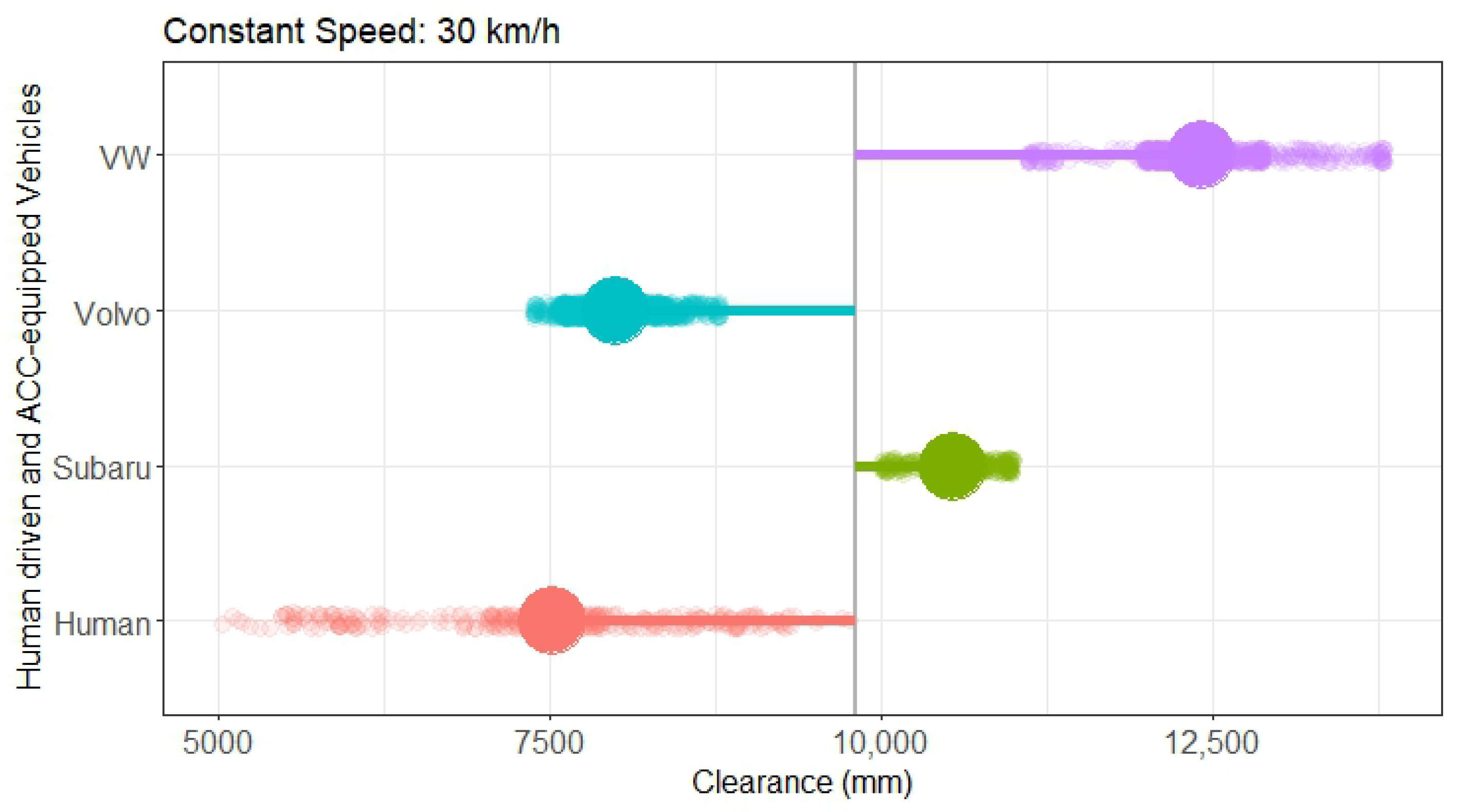
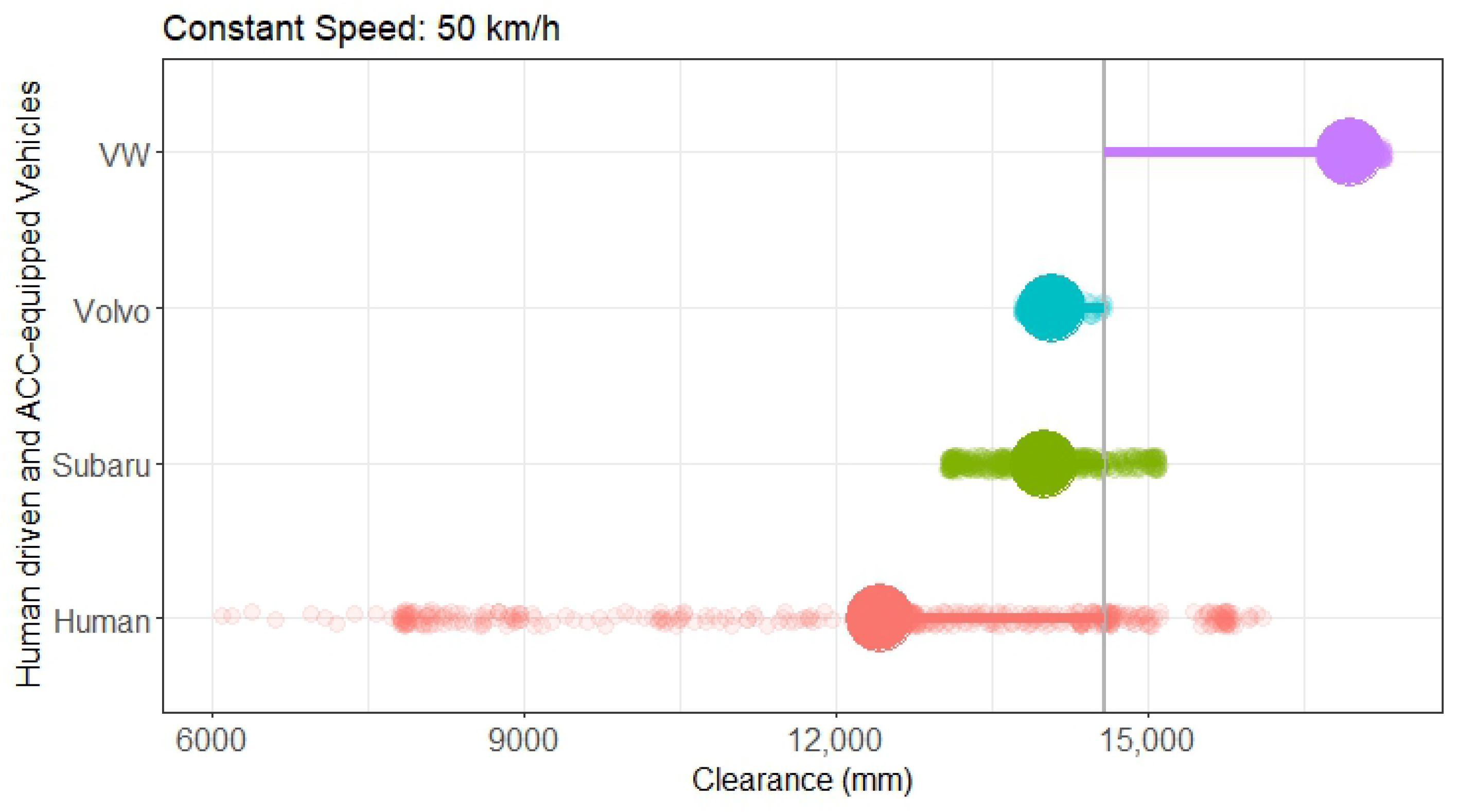
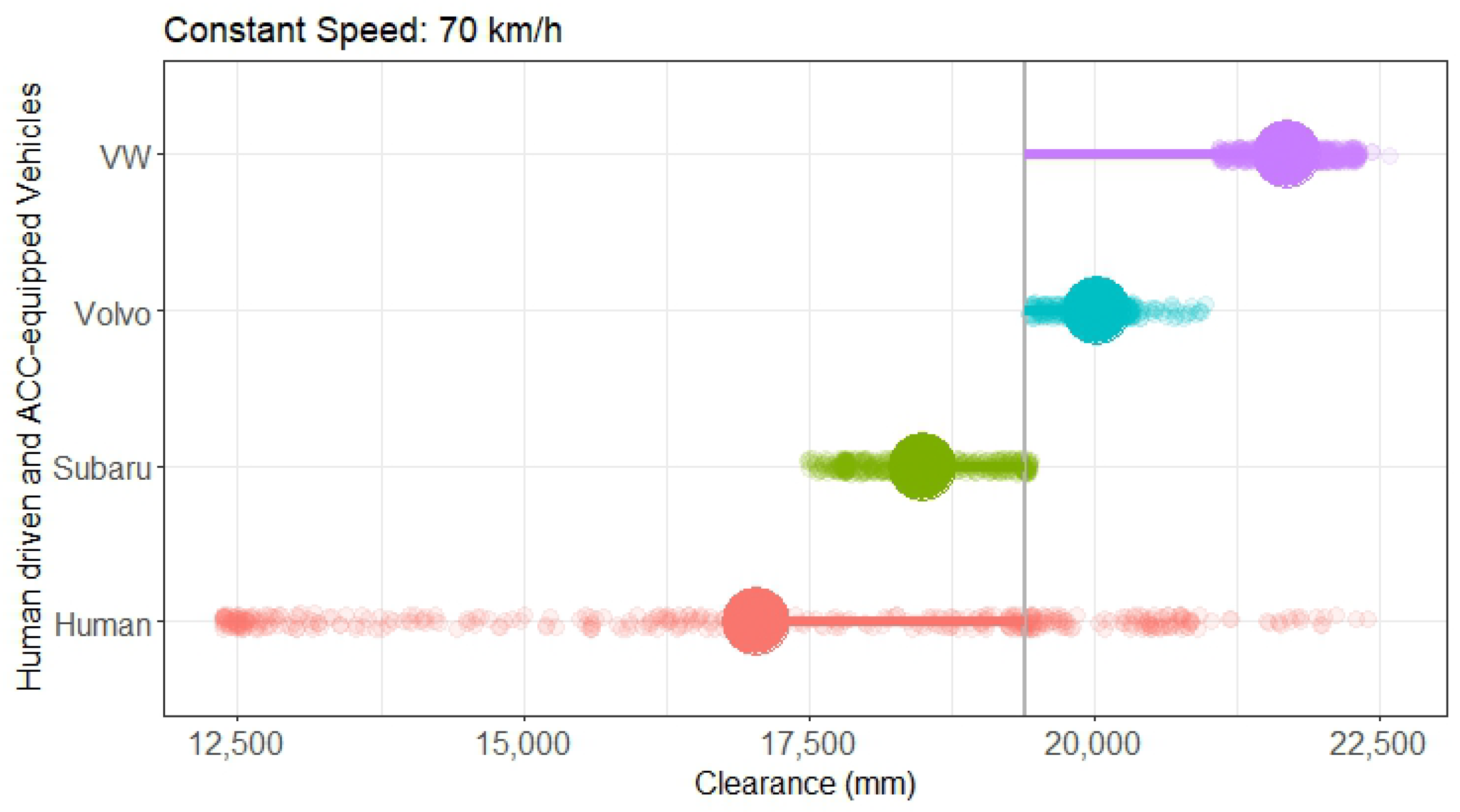
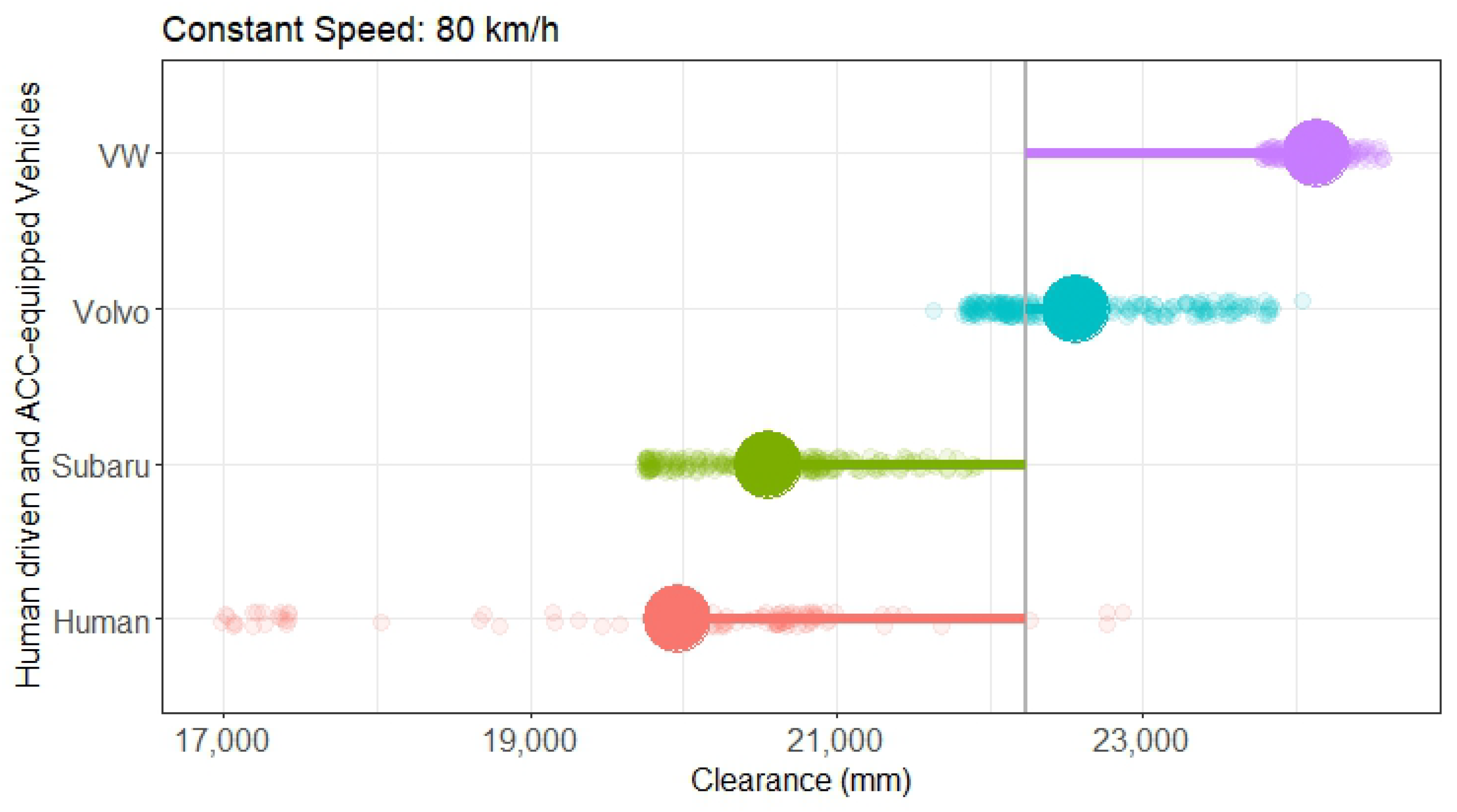
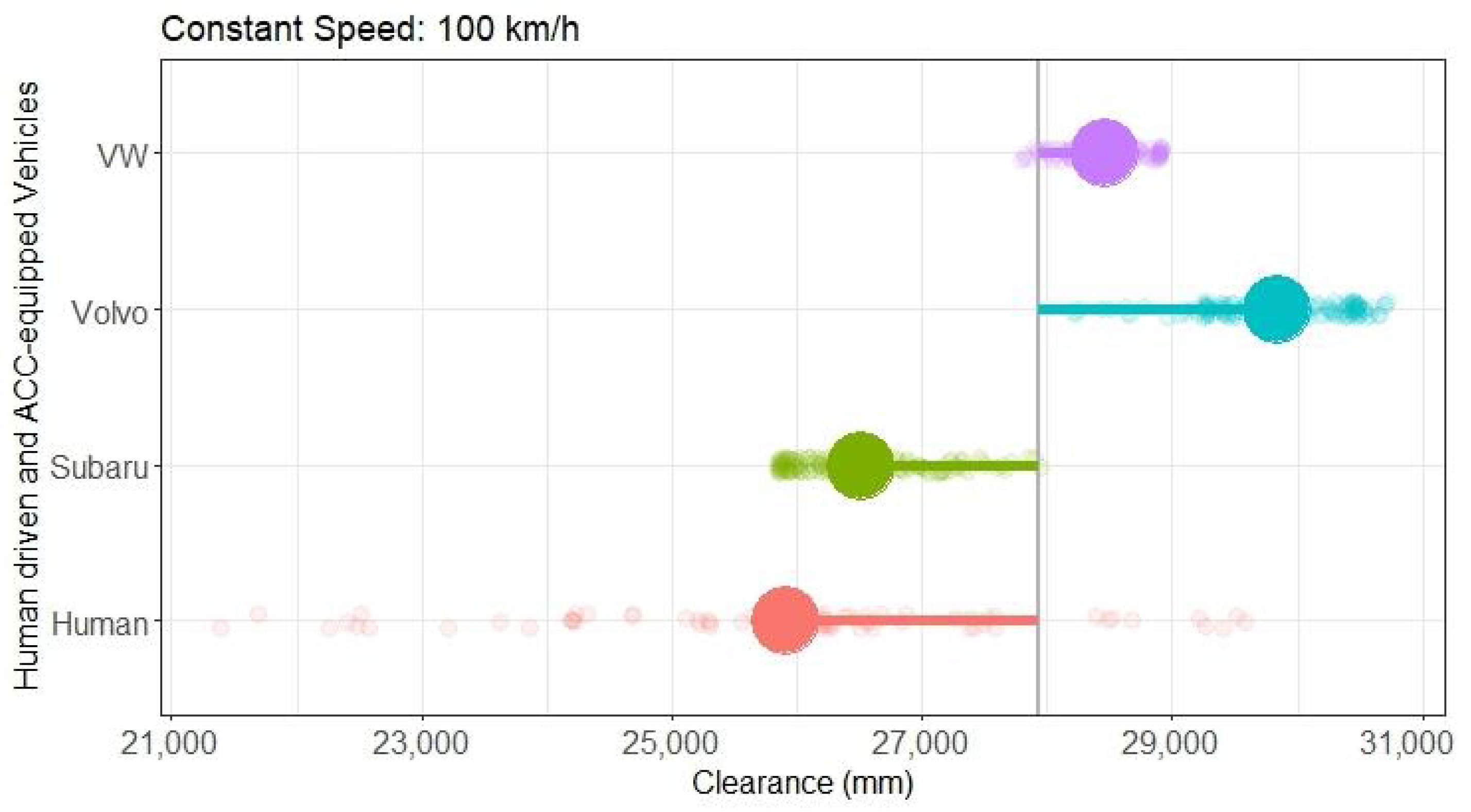
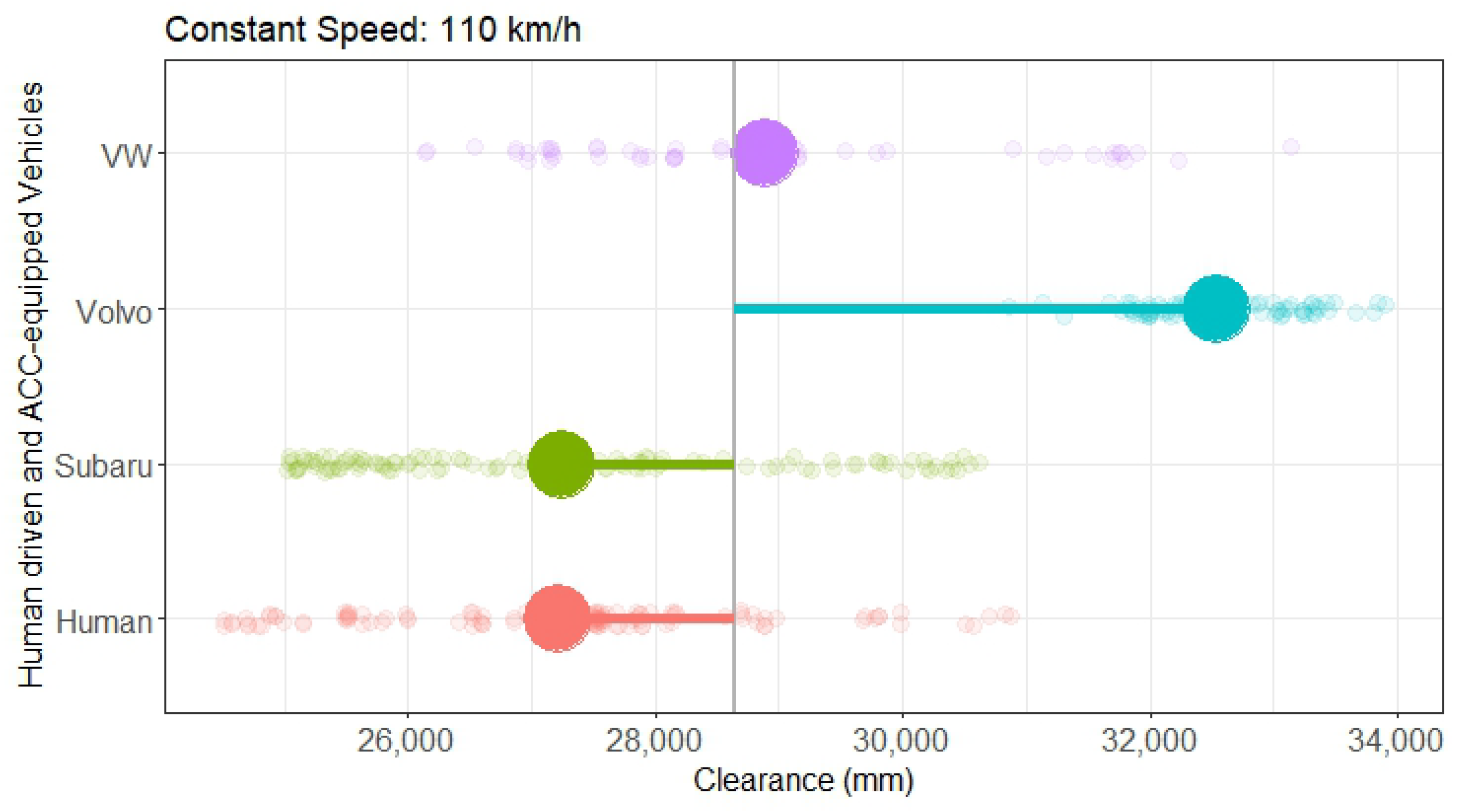
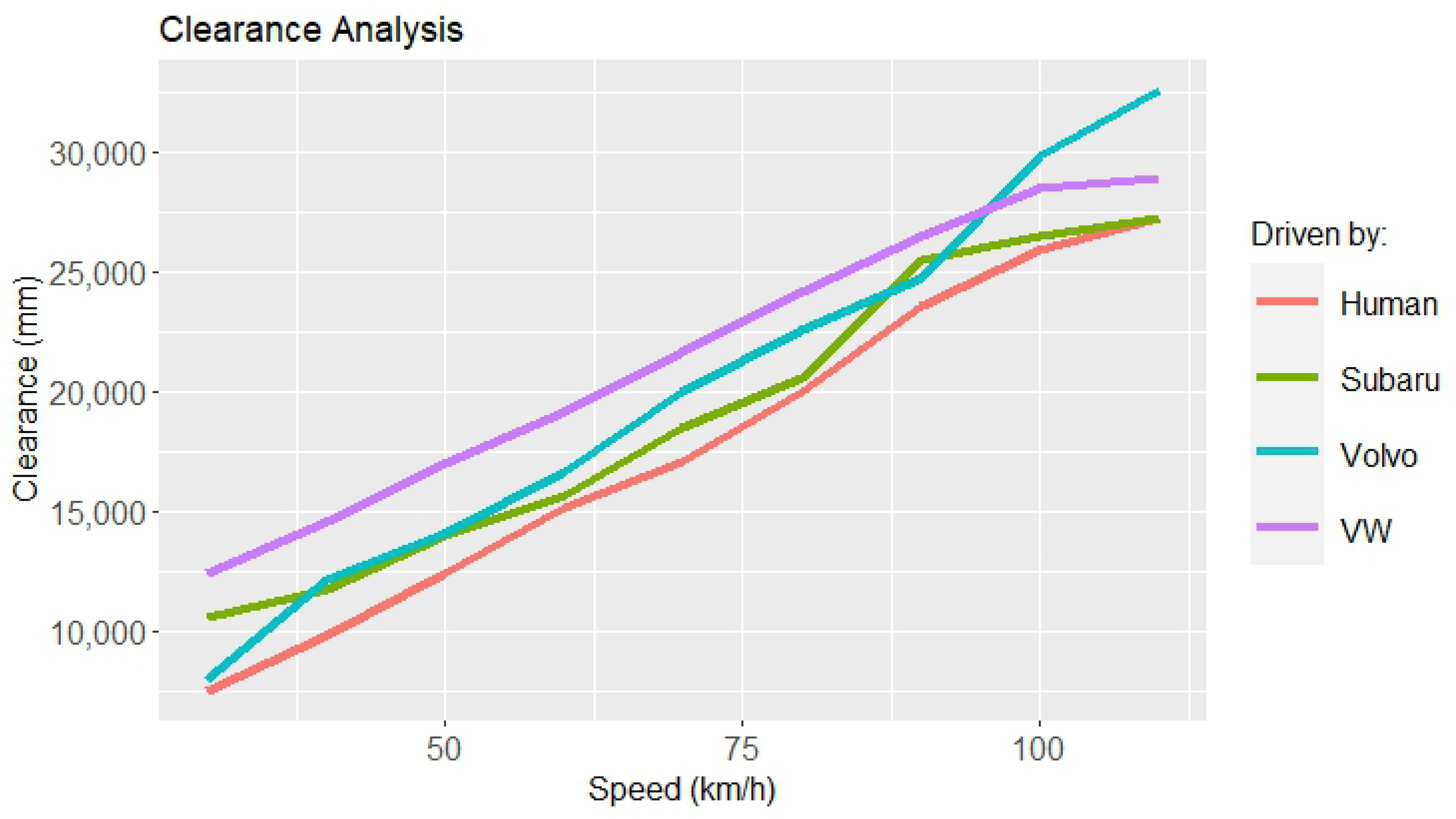
4.1. Average Clearance Analysis
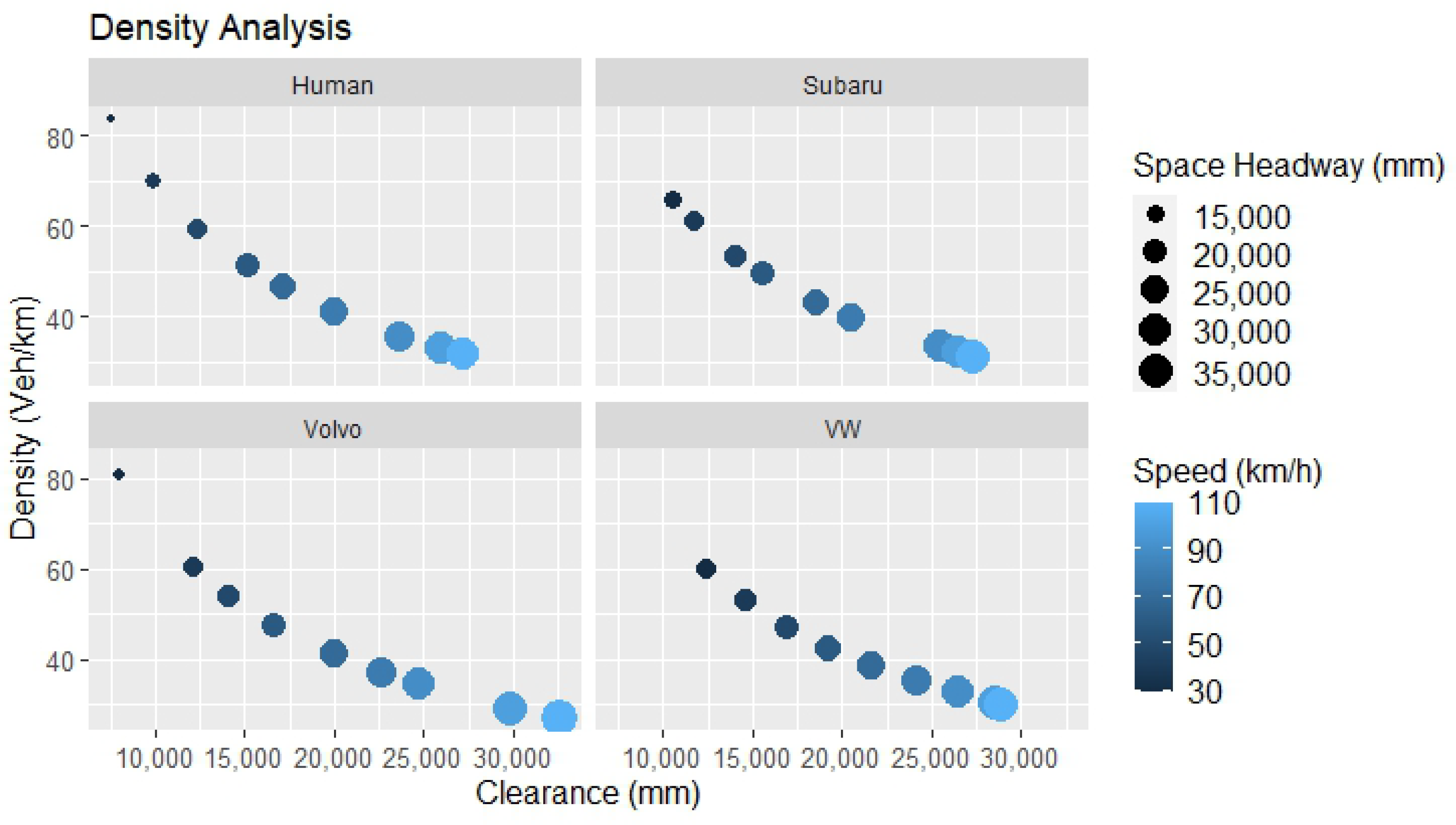
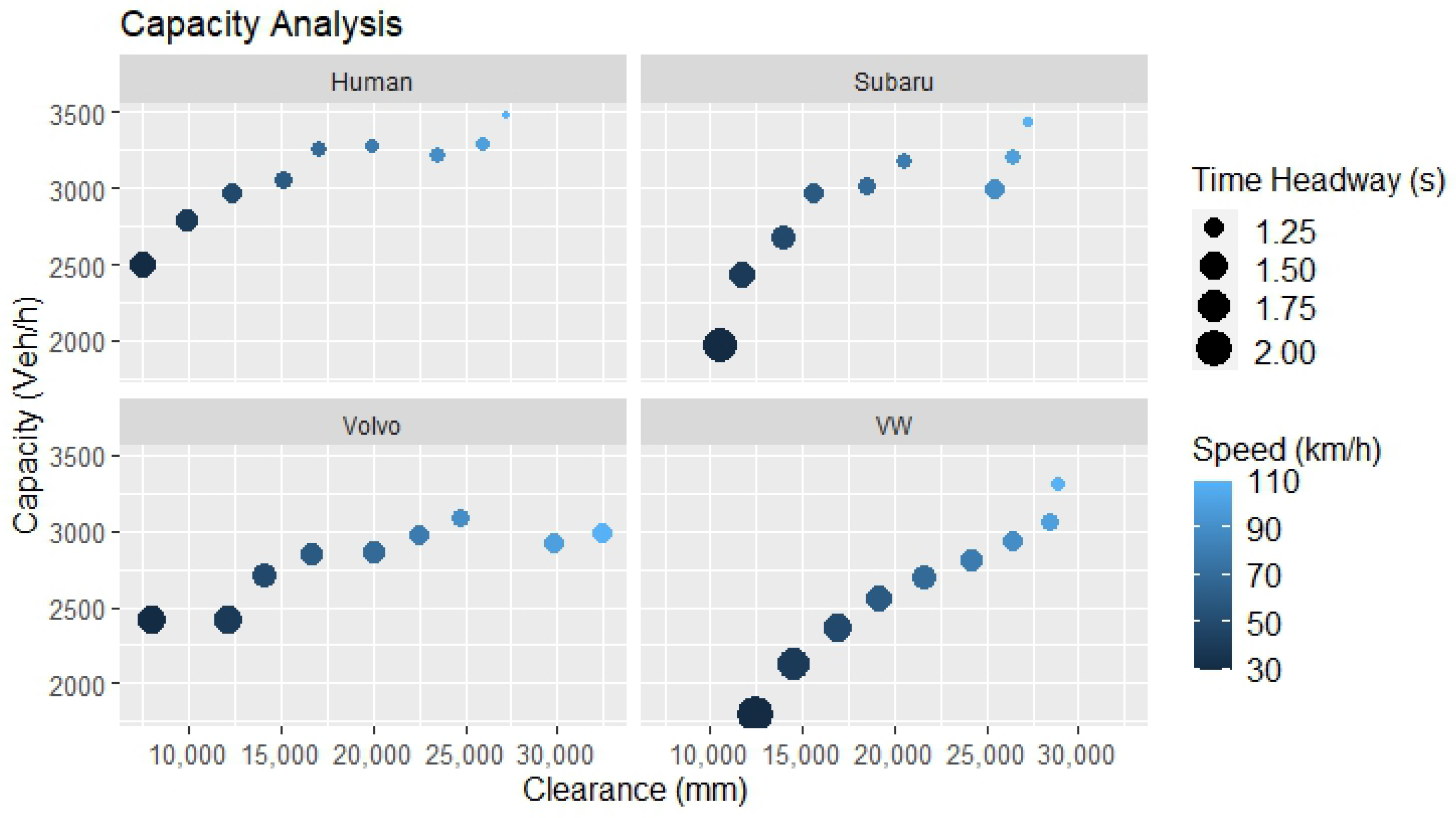
4.2. Space Headway, Time Headway, Density, and Capacity Analysis
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ACC | Adaptive Cruise Control |
References
- Li, Y.; Li, Z.; Wang, H.; Wang, W.; Xing, L. Evaluating the safety impact of adaptive cruise control in traffic oscillations on freeways. Accid. Anal. Prev. 2017, 104, 137–145. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Wang, H.; Wang, W.; Xing, L.; Liu, S.; Wei, X. Evaluation of the impacts of cooperative adaptive cruise control on reducing rear-end collision risks on freeways. Accid. Anal. Prev. 2017, 98, 87–95. [Google Scholar] [CrossRef] [PubMed]
- Luo, L.; Liu, M.; Mei, J.; Chen, Y.; Bi, L. A Visual-Based Approach for Drivers Environment Perception and Quantification in Different Weather Conditions. Appl. Sci. 2023, 13, 176. [Google Scholar] [CrossRef]
- Aloufi, N.; Alnori, A.; Thayananthan, V.; Basuhail, A. Object Detection Performance Evaluation for Autonomous Vehicles in Sandy Weather Environments. Appl. Sci. 2023, 13, 10249. [Google Scholar] [CrossRef]
- He, Y.; Ciuffo, B.; Zhou, Q.; Makridis, M.; Mattas, K.; Li, J.; Li, Z.; Yan, F.; Xu, H. Adaptive Cruise Control Strategies Implemented on Experimental Vehicles: A Review. IFAC-PapersOnLine 2019, 52, 21–27. [Google Scholar] [CrossRef]
- Vlacic, L.; Parent, M.; Harashima, F. (Eds.) Intelligent Vehicle Technologies; Automotive Engineering Series; Butterworth-Heinemann: Oxford, UK, 2001. [Google Scholar] [CrossRef]
- Miyata, S.; Nakagami, T.; Kobayashi, S.; Izumi, T.; Naito, H.; Yanou, A.; Nakamura, H.; Takehara, S. Improvement of adaptive cruise control performance. Eurasip J. Adv. Signal Process. 2010, 2010, 295016. [Google Scholar] [CrossRef]
- Rahman, R.; Hasan, S.; Zaki, M.H. Towards reducing the number of crashes during hurricane evacuation: Assessing the potential safety impact of adaptive cruise control systems. Transp. Res. Part C Emerg. Technol. 2021, 128, 103188. [Google Scholar] [CrossRef]
- Wang, J.; Rajamani, R. The impact of adaptive cruise control systems on highway safety and traffic flow. Proc. Theinstitution Mech. Eng. Part D J. Automob. Eng. 2004, 218, 111–130. [Google Scholar] [CrossRef]
- Shladover, S.E.; Su, D.; Lu, X.Y. Impacts of cooperative adaptive cruise control on freeway traffic flow. Transp. Res. Rec. 2012, 2324. [Google Scholar] [CrossRef]
- Aria, E.; Olstam, J.; Schwietering, C. Investigation of Automated Vehicle Effects on Driver’s Behavior and Traffic Performance. Transp. Res. Procedia 2016, 15, 761–770. [Google Scholar] [CrossRef]
- Lu, Q.; Tettamanti, T.; Hörcher, D.; Varga, I. The impact of autonomous vehicles on urban traffic network capacity: An experimental analysis by microscopic traffic simulation. Transp. Lett. 2020, 12, 540–549. [Google Scholar] [CrossRef]
- Masello, L.; Castignani, G.; Sheehan, B.; Murphy, F.; McDonnell, K. On the road safety benefits of advanced driver assistance systems in different driving contexts. Transp. Res. Interdiscip. Perspect. 2022, 15, 100670. [Google Scholar] [CrossRef]
- Ju, P.; Song, J. An Improved Advanced Driver-Assistance System: Model-Free Prescribed Performance Adaptive Cruise Control. Appl. Sci. 2023, 13, 11499. [Google Scholar] [CrossRef]
- Arem, B.V.; Driel, C.J.V.; Visser, R. The impact of cooperative adaptive cruise control on traffic-flow characteristics. IEEE Trans. Intell. Transp. Syst. 2006, 7, 429–436. [Google Scholar] [CrossRef]
- Fernandes, P.; Nunes, U. Multiplatooning leaders positioning and cooperative behavior algorithms of communicant automated vehicles for high traffic capacity. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1172–1187. [Google Scholar] [CrossRef]
- Harwood, N.; Reed, N. Modelling the impact of platooning on motorway capacity. In Proceedings of the IET Conference, London, UK, 6–7 October 2014; Volume 2014. [Google Scholar] [CrossRef]
- Borneo, A.; Zerbato, L.; Miretti, F.; Tota, A.; Galvagno, E.; Misul, D.A. Platooning Cooperative Adaptive Cruise Control for Dynamic Performance and Energy Saving: A Comparative Study of Linear Quadratic and Reinforcement Learning-Based Controllers. Appl. Sci. 2023, 13, 10459. [Google Scholar] [CrossRef]
- Mohammed, D.; Horváth, B. Vehicle Automation Impact on Traffic Flow and Stability: A Review of Literature. Acta Polytech. Hung. 2023, 20. [Google Scholar] [CrossRef]
- Kesting, A.; Treiber, M.; Schönhof, M.; Kranke, F.; Helbing, D. Jam-Avoiding Adaptive Cruise Control (ACC) and its Impact on Traffic Dynamics. In Traffic and Granular Flow’05; Springer: Cham, Switzerland, 2007; pp. 633–643. [Google Scholar] [CrossRef]
- Shi, X.; Li, X. Empirical study on car-following characteristics of commercial automated vehicles with different headway settings. Transp. Res. Part C Emerg. Technol. 2021, 128, 103134. [Google Scholar] [CrossRef]
- Arnaout, G.M.; Arnaout, J.P. Exploring the effects of cooperative adaptive cruise control on highway traffic flow using microscopic traffic simulation. Transp. Plan. Technol. 2014, 37, 186–199. [Google Scholar] [CrossRef]
- Park, J.E.; Byun, W.; Kim, Y.; Ahn, H.; Shin, D.K. The Impact of Automated Vehicles on Traffic Flow and Road Capacity on Urban Road Networks. J. Adv. Transp. 2021, 2021, 8404951. [Google Scholar] [CrossRef]
- VanderWerf, J.; Shladover, S.E.; Miller, M.A.; Kourjanskaia, N. Effects of adaptive cruise control systems on highway traffic flow capacity. Transp. Res. Rec. 2002, 1800, 78–84. [Google Scholar] [CrossRef]
- Calvert, S.C.; Schakel, W.J.; van Lint, J.W. Will automated vehicles negatively impact traffic flow? J. Adv. Transp. 2017, 2017, 3082781. [Google Scholar] [CrossRef]
- James, R.M.; Melson, C.; Hu, J.; Bared, J. Characterizing the impact of production adaptive cruise control on traffic flow: An investigation. Transportmetrica B 2019, 7, 992–1012. [Google Scholar] [CrossRef]
- Şentürk Berktaş, E.; Tanyel, S. Effect of Autonomous Vehicles on Performance of Signalized Intersections. J. Transp. Eng. Part A Syst. 2020, 146, 04019061. [Google Scholar] [CrossRef]
- Ploeg, J.; Scheepers, B.T.; Nunen, E.V.; Wouw, N.V.D.; Nijmeijer, H. Design and experimental evaluation of cooperative adaptive cruise control. In Proceedings of the IEEE Conference on Intelligent Transportation Systems—ITSC, Washington, DC, USA, 5–7 October 2011. [Google Scholar] [CrossRef]
- Gunter, G.; Gloudemans, D.; Stern, R.E.; McQuade, S.; Bhadani, R.; Bunting, M.; Monache, M.L.D.; Lysecky, R.; Seibold, B.; Sprinkle, J.; et al. Are Commercially Implemented Adaptive Cruise Control Systems String Stable? IEEE Trans. Intell. Transp. Syst. 2021, 22, 6992–7003. [Google Scholar] [CrossRef]
- Raju, N.; Schakel, W.; Reddy, N.; Dong, Y.; Farah, H. Car-Following Properties of a Commercial Adaptive Cruise Control System: A Pilot Field Test. Transp. Res. Rec. 2022, 2676, 128–143. [Google Scholar] [CrossRef]
- Makridis, M.; Mattas, K.; Ciuffo, B.; Re, F.; Kriston, A.; Minarini, F.; Rognelund, G. Empirical Study on the Properties of Adaptive Cruise Control Systems and Their Impact on Traffic Flow and String Stability. Transp. Res. Rec. 2020, 2674, 471–484. [Google Scholar] [CrossRef]
- Garber, N.J.; Hoel, L.A. Traffic and Highway Engineering; Cengage Learning: Boston, MA, USA, 2014. [Google Scholar]
- Shang, M.; Stern, R.E. Impacts of commercially available adaptive cruise control vehicles on highway stability and throughput. Transp. Res. Part C Emerg. Technol. 2021, 122, 102897. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle | Model Year | Engine | ACC Sensor | Length [mm] | Source |
|---|---|---|---|---|---|
| Subaru Levorg | 2019 | 1.6 L Petrol | Camera | 4690 | Subaru Official Website |
| Volvo XC40 | 2019 | 2.0 L Petrol | Camera-Radar | 4425 | Volvo Official Website |
| VW E-Golf | 2019 | Electric/battery | Radar | 4270 | VW Official Website |
| Speed [km/h] | Human-Driven Clearance [mm] | Subaru Clearance [mm] | Volvo Clearance [mm] | VW Clearance [mm] |
|---|---|---|---|---|
| 30 | 7514 | 10,537 | 7985 | 12,410 |
| 40 | 9846 | 11,732 | 12,124 | 14,586 |
| 50 | 12,420 | 14,000 | 14,076 | 16,951 |
| 60 | 15,156 | 15,607 | 16,660 | 19,174 |
| 70 | 17,031 | 18,487 | 20,015 | 21,687 |
| 80 | 19,960 | 20,547 | 22,557 | 24,135 |
| 90 | 23,552 | 25,480 | 24,708 | 26,464 |
| 100 | 25,909 | 26,503 | 29,826 | 28,452 |
| 110 | 27,211 | 27,247 | 32,538 | 28,876 |
| Speed [km/h] | Parameter | Human-Driven | Subaru | Volvo | VW |
|---|---|---|---|---|---|
| 30 | Space [m] | 11.976 | 15.227 | 12.410 | 16.680 |
| Time [s] | 1.437 | 1.827 | 1.489 | 2.002 | |
| 40 | Space [m] | 14.308 | 16.422 | 16.549 | 18.856 |
| Time [s] | 1.288 | 1.478 | 1.489 | 1.697 | |
| 50 | Space [m] | 16.882 | 18.690 | 18.501 | 21.221 |
| Time [s] | 1.216 | 1.346 | 1.332 | 1.528 | |
| 60 | Space [m] | 19.618 | 20.297 | 21.085 | 23.444 |
| Time [s] | 1.177 | 1.218 | 1.265 | 1.407 | |
| 70 | Space [m] | 21.493 | 23.177 | 24.440 | 25.957 |
| Time [s] | 1.105 | 1.192 | 1.257 | 1.335 | |
| 80 | Space [m] | 24.422 | 25.237 | 26.982 | 28.405 |
| Time [s] | 1.099 | 1.136 | 1.214 | 1.278 | |
| 90 | Space [m] | 28.014 | 30.170 | 29.133 | 30.734 |
| Time [s] | 1.121 | 1.207 | 1.165 | 1.229 | |
| 100 | Space [m] | 30.371 | 31.193 | 34.251 | 32.722 |
| Time [s] | 1.093 | 1.123 | 1.233 | 1.178 | |
| 110 | Space [m] | 31.673 | 31.937 | 36.963 | 33.146 |
| Time [s] | 1.037 | 1.045 | 1.210 | 1.085 |
| Speed [km/h] | Parameter | Human- Driven | Subaru | Volvo | VW | Subaru/Human % Decrease | Volvo/Human % Decrease | VW/Human % Decrease |
|---|---|---|---|---|---|---|---|---|
| 30 | Density [veh/km] | 84 | 66 | 81 | 60 | 21.4 | 3.5 | 28.2 |
| Capacity [veh/h] | 2505 | 1970 | 2417 | 1799 | 21.4 | 3.5 | 28.2 | |
| 40 | Density [veh/km] | 70 | 61 | 60 | 53 | 12.9 | 13.5 | 24.1 |
| Capacity [veh/h] | 2796 | 2436 | 2417 | 2121 | 12.9 | 13.5 | 24.1 | |
| 50 | Density [veh/km] | 59 | 54 | 54 | 47 | 9.7 | 8.8 | 20.4 |
| Capacity [veh/h] | 2962 | 2675 | 2703 | 2356 | 9.7 | 8.8 | 20.4 | |
| 60 | Density [veh/km] | 51 | 49 | 47 | 43 | 3.3 | 7 | 16.3 |
| Capacity [veh/h] | 3058 | 2956 | 2846 | 2559 | 3.3 | 7 | 16.3 | |
| 70 | Density [veh/km] | 47 | 43 | 41 | 39 | 7.3 | 12.1 | 17.2 |
| Capacity [veh/h] | 3257 | 3020 | 2864 | 2697 | 7.3 | 12.1 | 17.2 | |
| 80 | Density [veh/km] | 41 | 40 | 37 | 35 | 3.2 | 9.5 | 14.0 |
| Capacity [veh/h] | 3276 | 3170 | 2965 | 2816 | 3.2 | 9.5 | 14.0 | |
| 90 | Density [veh/km] | 36 | 33 | 34 | 33 | 7.1 | 3.8 | 8.9 |
| Capacity [veh/h] | 3213 | 2983 | 3089 | 2928 | 7.1 | 3.8 | 8.9 | |
| 100 | Density [veh/km] | 33 | 32 | 29 | 31 | 2.6 | 11.3 | 7.2 |
| Capacity [veh/h] | 3293 | 3206 | 2920 | 3056 | 2.6 | 11.3 | 7.2 | |
| 110 | Density [veh/km] | 32 | 31 | 27 | 30 | 0.8 | 14.3 | 4.4 |
| Capacity [veh/h] | 3473 | 3444 | 2976 | 3319 | 0.8 | 14.3 | 4.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohammed, D.; Horváth, B. Steady-Speed Traffic Capacity Analysis for Autonomous and Human-Driven Vehicles. Appl. Sci. 2024, 14, 337. https://doi.org/10.3390/app14010337
Mohammed D, Horváth B. Steady-Speed Traffic Capacity Analysis for Autonomous and Human-Driven Vehicles. Applied Sciences. 2024; 14(1):337. https://doi.org/10.3390/app14010337
Chicago/Turabian StyleMohammed, Dilshad, and Balázs Horváth. 2024. "Steady-Speed Traffic Capacity Analysis for Autonomous and Human-Driven Vehicles" Applied Sciences 14, no. 1: 337. https://doi.org/10.3390/app14010337
APA StyleMohammed, D., & Horváth, B. (2024). Steady-Speed Traffic Capacity Analysis for Autonomous and Human-Driven Vehicles. Applied Sciences, 14(1), 337. https://doi.org/10.3390/app14010337