
A Novel Method for Analyzing the Spatiotemporal Characteristics of GNSS Time Series: A Case Study in Sichuan Province, China

 , ,
, ,
Abstract
1. Introduction
2. Experiments and Methodology
2.1. Time Series Function Model
2.2. Lomb–Scargle Periodogram Analysis
2.3. Principal Component Analysis
2.4. Variance-Covariance Fitting Model
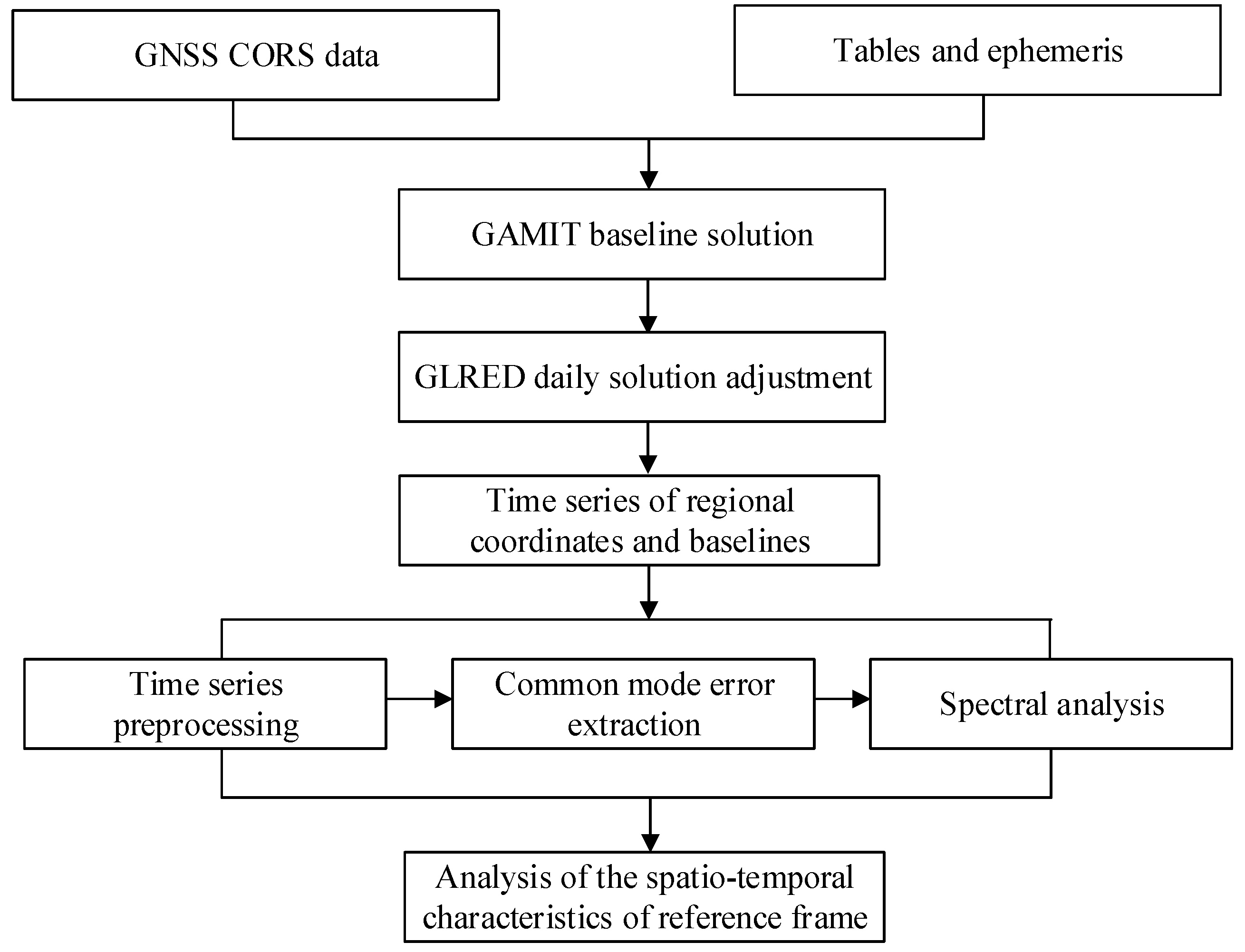
2.5. Time Series Resolution Strategy and Analysis Process
3. Results
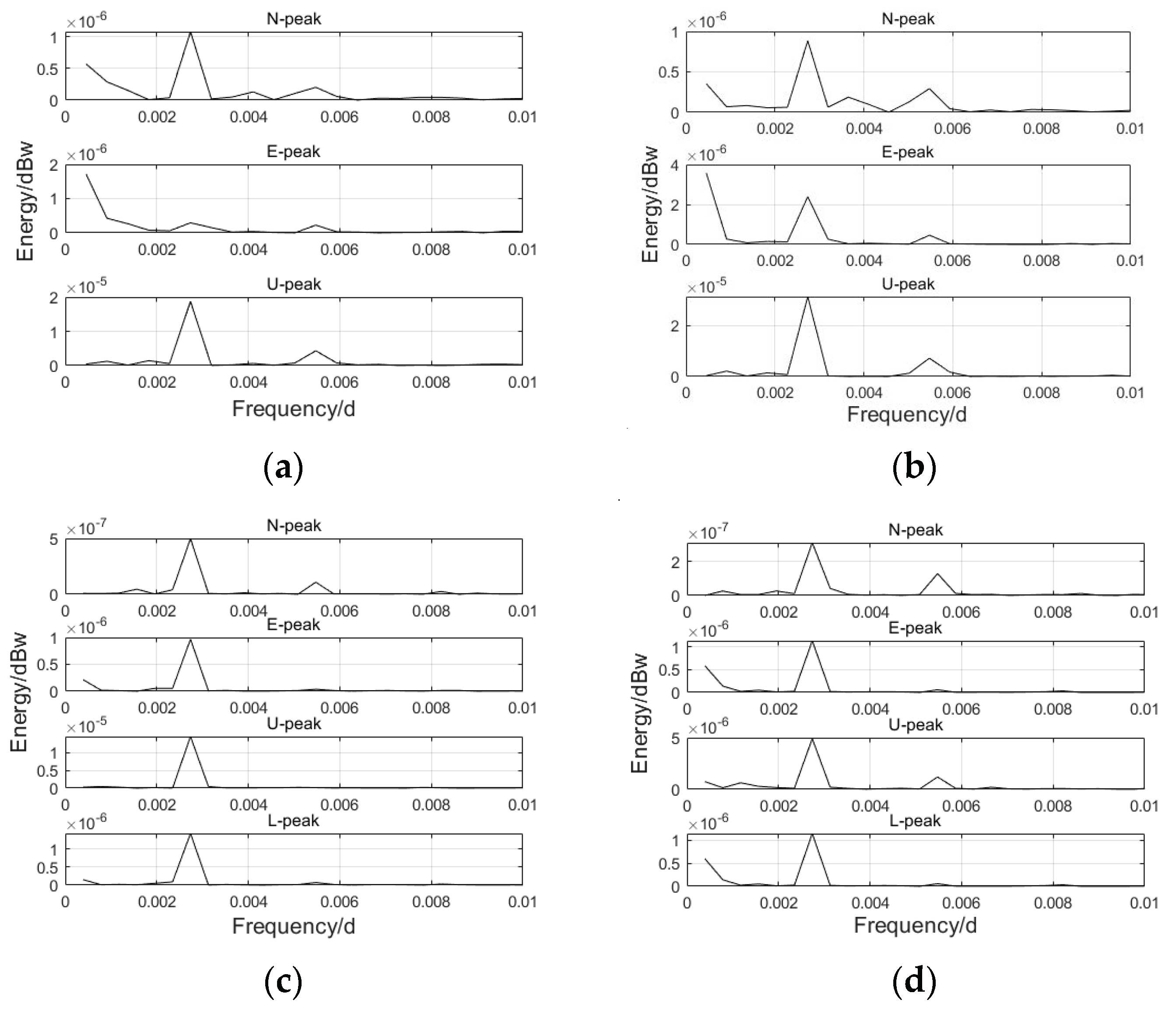
3.1. Spectrum Analysis
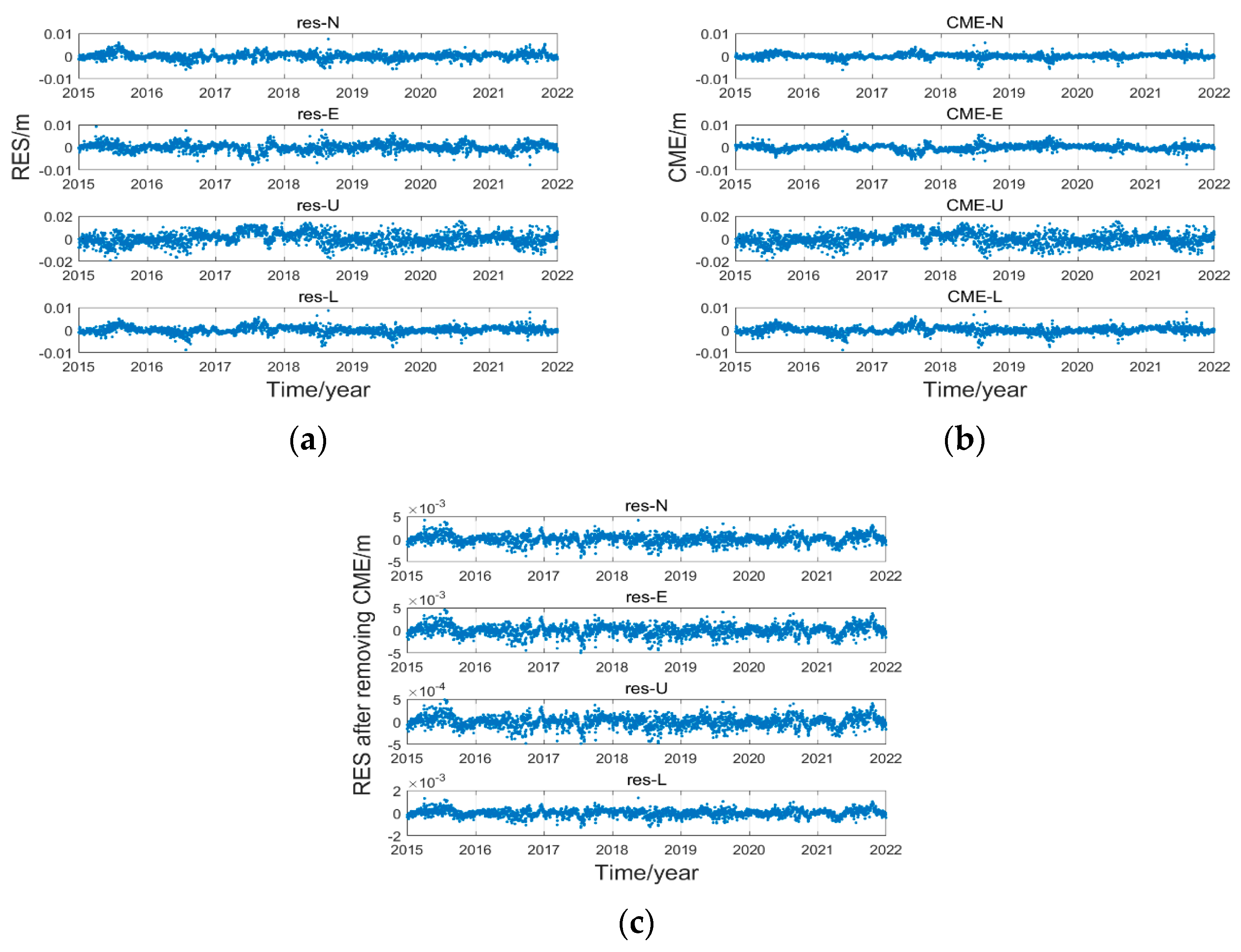
3.2. Common Mode Error Analysis
3.3. Analysis of Spatiotemporal Movement Patterns
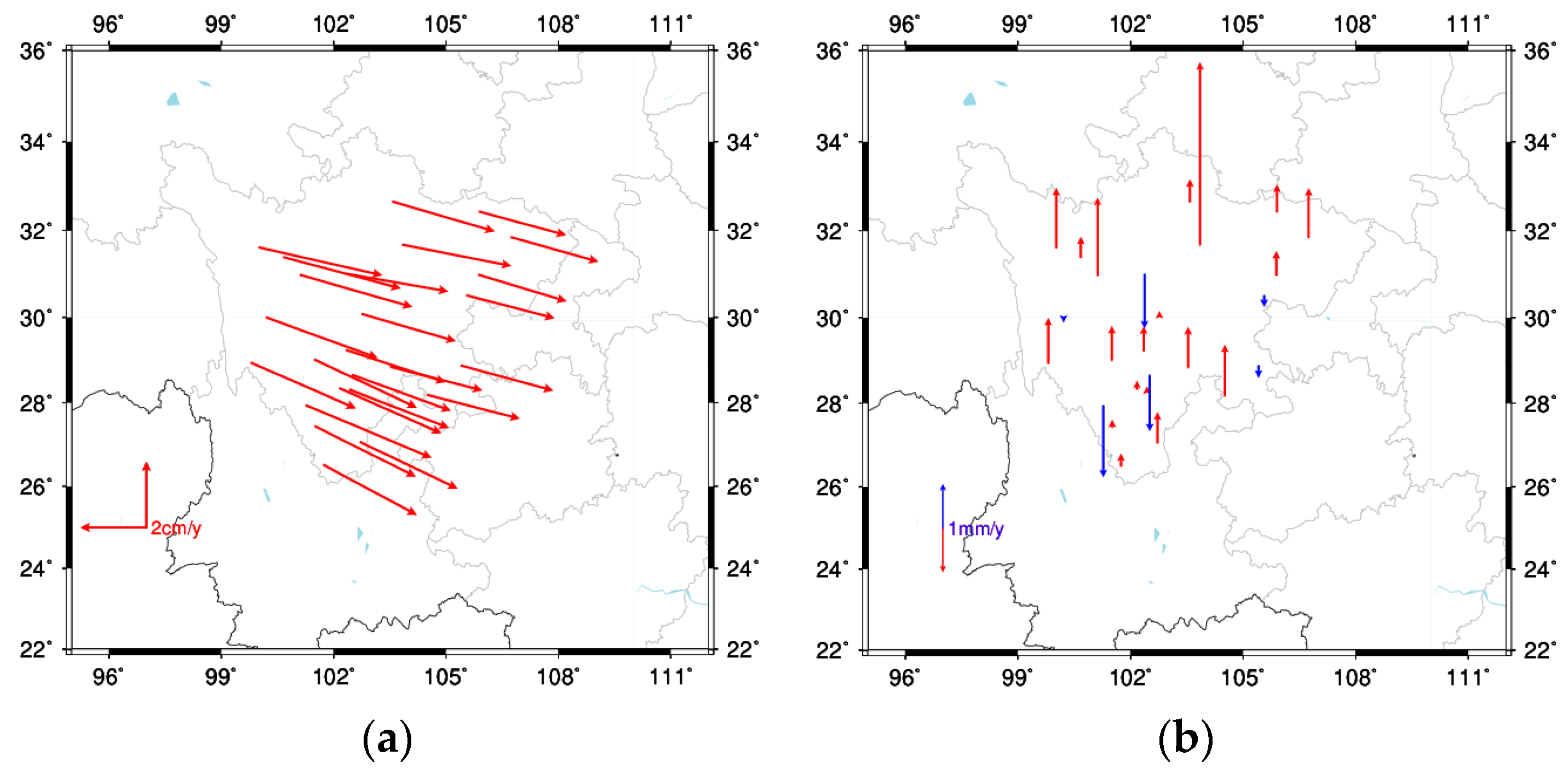
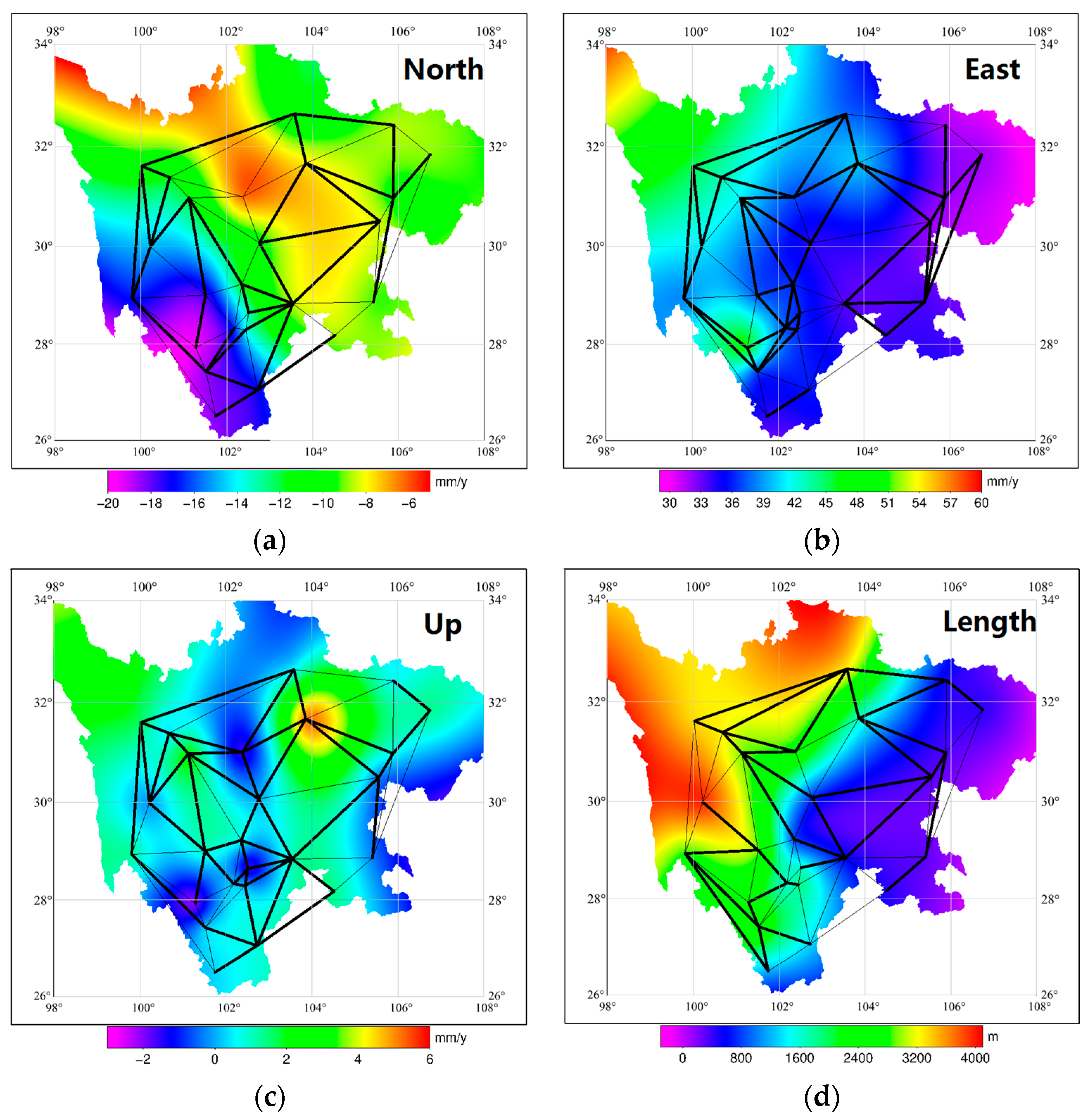
- Analyzing the annual change rate of the north–south component of the baseline, the baseline in the north–east direction is mainly shortened, with a mean annual change rate of −2.7 mm/y, concentrated in the western and northern areas of Sichuan. The bottom graph shows that the movement of the plates in the region is smoother in the north–south direction. Some of the baselines in the north–west direction are in a stretching state, with a mean annual rate of change of 2.0 mm/y, concentrated in the south-central part of Sichuan. The more intense plate motions in the region may be one of the reasons for the baseline stretching.
- The annual rate of change of the east–west component of the baseline is analyzed, and a large number of baselines in the north–east direction are shortening year by year, concentrated in the central and northern areas (68%), with a mean annual rate of change of −3.0 mm/y. The bottom graph shows that the movement of the plates in the region is smoother in the east–west direction, which may have caused the baseline stretching. Some baselines in the north–west and north–east directions are mainly in a stretching trend, with a mean annual rate of change of 2.7 mm/y.
- The annual rate of change of the vertical component of the baseline was analyzed and 68% of the baseline showed a shortening trend characteristic with a mean annual rate of change of −1.4 mm/y. A small number of baselines were in a stretched state with a mean annual rate of change of 1.1 mm/y. As can be seen from the bottom graph, the shortened baselines are mainly concentrated in the subsidence area, indicating that ground subsidence may cause baseline shortening in the Sichuan region.
- From the annual rate of change in the shortening trend baseline, the vertical component is 1.3 mm/y and 1.6 mm/y lower than the north–south and east–west components, respectively. From the annual rate of change in the stretching trend baseline, the vertical component is 0.9 mm/y and 1.6 mm/y lower than the north–south and east–west components, respectively, showing a more stable baseline in the vertical direction.
- Analyzing the annual rate of change of baseline lengths, the baselines in the north–west direction are mainly dominated by a shortening trend, with a mean annual rate of change of −2.8 mm/y, showing that these baselines are shortened on a scale of 2.8 mm per year; some of the baselines in the north–east and north–west directions are dominated by a stretching trend, with a mean annual rate of change of 2.6 mm/y, with more obvious changes. From the bottom graph, it can be seen that the topography of Sichuan gradually declines from northwestern to southeastern, and the baseline of scale shortening is mainly concentrated in the region with relatively smooth topography, while the baseline of the region with larger drop is dominated by stretching, which may provide some new ideas for the study of baseline change.
3.4. Analysis of Random Influence between Reference Stations and Model Construction
4. Discussion
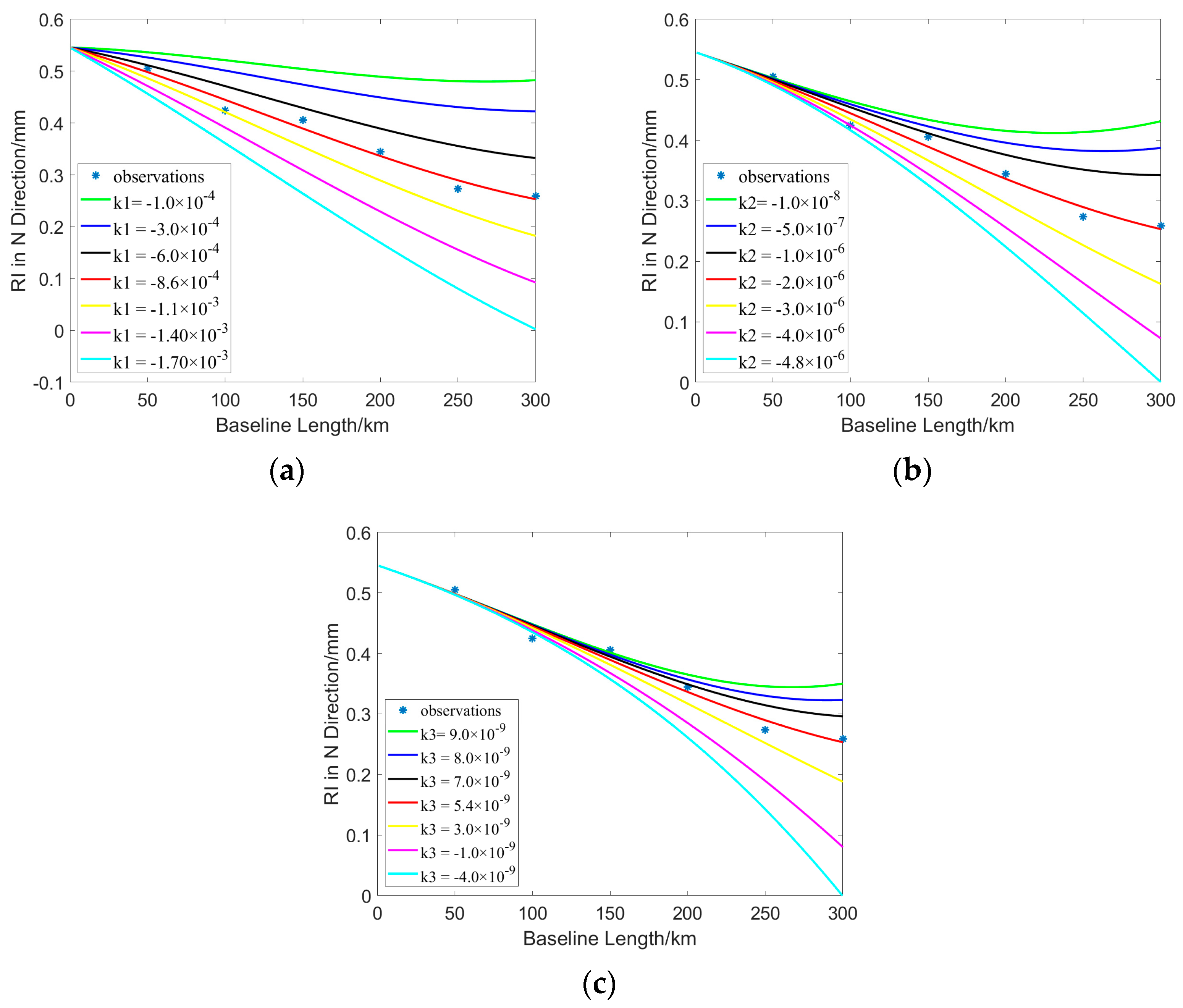
- Set k2 and k3 to the constants that have been calculated and adjust the value of k1;
- Set k1 and k3 to the constants that have been calculated and adjust the value of k2;
- Set k1 and k2 to the constants that have been calculated and adjust the value of k3.
- Since k1, k2 and k3 are all variables, it is not possible to determine the range of values of all three variables at the same time. Therefore, the control variable method is used to analyze the effect of a particular variable on the positive definiteness of the function;
- In all three schemes, the polynomial fit value decreases as the value of the single variable k decreases. In particular, at values of −1.70 × 10−3 for k1, −4.8 × 10−6 for k2 and −4.0 × 10−9 for k3, the function fit value is close to zero. In order to maintain the positive definiteness of the function, the single variable k may not be smaller than the above values, respectively;
- The polynomial function model does not have positive definiteness, so the k value needs to be carefully chosen to fulfill the requirement. Meanwhile, the method for calculating the range of k-values of the function model in the E, U and L components is also similar to that of the N component, which will not be discussed here.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rebischung, P.; Altamimi, Z.; Ray, J.; Garayt, B. The IGS contribution to ITRF2014. J. Geod. 2016, 90, 611–630. [Google Scholar] [CrossRef]
- Altamimi, Z.; Rebischung, P.; Métivier, L.; Collilieux, X. ITRF2014: A new release of the International Terrestrial Reference Frame modeling nonlinear station motions. J. Geophys. Res. Solid Earth 2016, 121, 6109–6131. [Google Scholar] [CrossRef]
- Bao, Y.; Yu, X.; Wang, G.Q.; Zhou, H.J.; Ding, X.G.; Xiao, G.R.; Shen, S.L.; Zhao, R.B.; Gan, W.J. SChina20: A stable geodetic reference frame for ground movement and structural deformation monitoring in South China. J. Surv. Eng. 2021, 147, 04021006. [Google Scholar] [CrossRef]
- Peng, Y.; Dong, D.N.; Chen, W.; Zhang, C.L. Stable regional reference frame for reclaimed land subsidence study in East China. Remote Sens. 2022, 14, 3984. [Google Scholar] [CrossRef]
- Rizos, C. Alternatives to current GPS-RTK services and some implications for CORS infrastructure and operations. GPS Solut. 2007, 11, 151–158. [Google Scholar] [CrossRef]
- Wang, G.Q.; Bao, Y.; Gan, W.J.; Geng, J.H.; Xiao, G.R.; Shen, J.S. NChina16: A stable geodetic reference frame for geological hazard studies in North China. J. Geodyn. 2018, 115, 10–22. [Google Scholar] [CrossRef]
- Yu, J.; Wang, G. Introduction to the GNSS geodetic infrastructure in the Gulf of Mexico Region. Surv. Rev. 2017, 49, 51–65. [Google Scholar] [CrossRef]
- Kenyeres, A.; Bellet, J.G.; Bruyninx, C.; Caporali, A.; Doncker, F.; Droscak, B.; Duret, A.; Franke, P.; Georgiev, I.; Bingley, R.; et al. Regional integration of long-term national dense GNSS network solutions. GPS Solut. 2019, 23, 122. [Google Scholar] [CrossRef]
- Fazilova, D.; Ehgamberdiev, S.; Kuzin, S. Application of time series modeling to a national reference frame realization. Geod. Geodyn. 2018, 9, 281–287. [Google Scholar] [CrossRef]
- García-Armenteros, J.A. Topo-Iberia CGPS network: A new 3D crustal velocity field in the Iberian Peninsula and Morocco based on 11 years (2008–2019). GPS Solut. 2023, 27, 155. [Google Scholar] [CrossRef]
- Zhou, W.; Ding, K.H.; Liu, P.; Lan, G.H.; Ming, Z.T. Spatiotemporal filtering for continuous GPS coordinate time series in mainland China by using independent component analysis. Remote Sens. 2022, 14, 2904. [Google Scholar] [CrossRef]
- Yu, J.S.; Tan, K.; Zhang, C.H.; Zhao, B.; Wang, D.Z.; Li, Q. Present-day crustal movement of the Chinese mainland based on Global Navigation Satellite System data from 1998 to 2018. Adv. Space Res. 2019, 63, 840–856. [Google Scholar] [CrossRef]
- Yue, C.Y.; Dang, Y.M.; Dai, H.Y.; Yang, Q.; Wang, X.K. Crustal deformation characteristics of Sichuan-Yunnan region in China on the constraint of multi-periods of GPS velocity fields. Adv. Space Res. 2018, 61, 2180–2189. [Google Scholar] [CrossRef]
- Zhou, M.S.; Guo, J.Y.; Liu, X.; Shen, Y.; Zhao, C.M. Crustal movement derived by GNSS technique considering common mode error with MSSA. Adv. Space Res. 2020, 66, 1819–1828. [Google Scholar] [CrossRef]
- Niu, Y.J.; Rebischung, P.; Li, M.; Wei, N.; Shi, C.; Altamimi, Z. Temporal spectrum of spatial correlations between GNSS station position time series. J. Geod. 2023, 97, 12. [Google Scholar] [CrossRef]
- Hu, S.Q.; Chen, K.J.; Zhu, H.; Wang, T.; Zhao, Q.; Yang, Z.Y. Potential Contributors to CME and Optimal Noise Model Analysis in the Chinese Region Based on Different HYDL Models. Remote Sens. 2023, 15, 945. [Google Scholar] [CrossRef]
- Ma, X.J.; Liu, B.; Dai, W.J.; Kuang, C.L.; Xing, X.M. Potential Contributors to Common Mode Error in Array GPS Displacement Fields in Taiwan Island. Remote Sens. 2021, 13, 4221. [Google Scholar] [CrossRef]
- Li, W.H.; Li, F.; Zhang, S.K.; Lei, J.T.; Zhang, Q.C.; Yuan, L.X. Spatiotemporal filtering and noise analysis for regional GNSS network in Antarctica using independent component analysis. Remote Sens. 2019, 11, 386. [Google Scholar] [CrossRef]
- Bian, Y.K.; Yue, J.P.; Ferreira, V.G.; Cong, K.L.; Cai, D.J. Common mode component and its potential effect on GPS-inferred crustal deformations in Greenland. Pure Appl. Geophys. 2021, 178, 1805–1823. [Google Scholar] [CrossRef]
- Wdowinski, S.; Bock, Y.; Zhang, J.; Fang, P.; Genrich, J. Southern California permanent GPS geodetic array: Spatial filtering of daily positions for estimating coseismic and postseismic displacements induced by the 1992 Landers earthquake. J. Geophys. Res. Solid Earth 1997, 102, 18057–18070. [Google Scholar] [CrossRef]
- Bian, Y.K.; Li, Z.; Huang, Z.Q.; He, B.; Shi, L.L.; Miao, S. Combined GRACE and GPS to Analyze the Seasonal Variation of Surface Vertical Deformation in Greenland and Its Influence. Remote Sens. 2023, 15, 511. [Google Scholar] [CrossRef]
- Pan, Y.J.; Chen, R.Z.; Ding, H.; Xu, X.Y.; Zheng, G.; Shen, W.B.; Xiao, Y.X.; Li, S.Y. Common mode component and its potential effect on GPS-inferred three-dimensional crustal deformations in the Eastern Tibetan Plateau. Remote Sens. 2019, 11, 1975. [Google Scholar] [CrossRef]
- Lomb, N.R. Least-squares frequency analysis of unequally spaced data. Astrophys. Space Sci. 1976, 39, 447–462. [Google Scholar] [CrossRef]
- VanderPlas, J.T. Understanding the lomb–scargle periodogram. Astrophys. J. Suppl. Ser. 2018, 236, 16. [Google Scholar] [CrossRef]
- Yu, H.J.; Chen, Q.J.; Sun, Y.; Sosnica, K. Geophysical Signal Detection in the Earth’s Oblateness Variation and Its Climate-Driven Source Analysis. Remote Sens. 2021, 13, 2004. [Google Scholar] [CrossRef]
- Garate, J.; Martin-Davila, J.; Khazaradze, G.; Echeverria, A.; Asensio, E.; Gil, A.J.; Lacy, M.C.; Armenteros, J.A.; Ruiz, A.M.; Gallastegui, J.; et al. Topo-Iberia project: CGPS crustal velocity field in the Iberian Peninsula and Morocco. GPS Solut. 2015, 19, 287–295. [Google Scholar] [CrossRef]
- He, X.X.; Hua, X.H.; Yu, K.G.; Xuan, W.; Lu, T.D.; Zhang, W.; Chen, X. Accuracy enhancement of GPS time series using principal component analysis and block spatial filtering. Adv. Space Res. 2015, 55, 1316–1327. [Google Scholar] [CrossRef]
- Wu, J.C.; Song, X.Y.; Wu, W.W.; Meng, G.J.; Ren, Y.Y. Analysis of crustal movement and deformation in mainland China based on CMONOC baseline time series. Remote Sens. 2021, 13, 2481. [Google Scholar] [CrossRef]
- Altamimi, Z.; Rebischung, P.; Collilieux, X.; Métivier, L.; Chanard, K. ITRF2020: An augmented reference frame refining the modeling of nonlinear station motions. J. Geod. 2023, 97, 47. [Google Scholar] [CrossRef]
- Reguzzoni, M.; Rossi, L.; De Gaetani, C.I.; Caldera, S.; Barzaghi, R. GNSS-based dam monitoring: The application of a statistical approach for time series analysis to a case study. Appl. Sci. 2022, 12, 9981. [Google Scholar] [CrossRef]
- Niu, Y.J.; Wei, N.; Li, M.; Rebischung, P.; Shi, C.; Chen, G. Quantifying discrepancies in the three-dimensional seasonal variations between IGS station positions and load models. J. Geod. 2022, 96, 31. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Statistics | Reference Station Components | Baseline Components | |||||
|---|---|---|---|---|---|---|---|
| N | E | U | N | E | U | L | |
| Max | 2.31 | 2.96 | 6.36 | 2.17 | 2.11 | 5.90 | 2.32 |
| Min | 0.33 | 1.49 | 3.44 | 0.05 | 0.04 | 2.55 | 0.10 |
| Average | 1.01 | 2.24 | 4.34 | 0.87 | 1.18 | 3.65 | 1.18 |
| Series | Station | N | E | U | Series | Station | N | E | U |
|---|---|---|---|---|---|---|---|---|---|
| 1 | LUZH | −9.2 | 33.7 | −0.3 | 14 | SCNC | −9.7 | 32.1 | 0.6 |
| 2 | SCBZ | −8.9 | 31.9 | 1.3 | 15 | SCNN | −17.1 | 35.8 | 0.8 |
| 3 | SCDF | −11.8 | 41.2 | 2.1 | 16 | SCPZ | −18.3 | 34.2 | 0.3 |
| 4 | SCGU | −8.7 | 31.7 | 0.7 | 17 | SCSM | −11.8 | 36.3 | 0.6 |
| 5 | SCGZ | −10.3 | 45.4 | 1.6 | 18 | SCSN | −8.4 | 32.1 | −0.3 |
| 6 | SCJL | −17.7 | 37.6 | 0.9 | 19 | SCSP | −10.9 | 37.6 | 0.6 |
| 7 | SCJU | −8.7 | 33.8 | 1.4 | 20 | SCTQ | −9.9 | 34.3 | 0.1 |
| 8 | SCLH | −11.5 | 43.1 | 0.5 | 21 | SCXC | −16.9 | 38.6 | 1.2 |
| 9 | SCLT | −14.9 | 40.9 | −0.1 | 22 | SCXD | −14.0 | 36.5 | 0.1 |
| 10 | SCMB | −8.6 | 33.5 | 1.1 | 23 | SCXJ | −6.4 | 37.0 | −1.5 |
| 11 | SCML | −19.4 | 46.3 | −1.9 | 24 | SCYX | −13.1 | 36.2 | −1.5 |
| 12 | SCMN | −16.5 | 37.3 | 0.2 | 25 | SCYY | −18.5 | 37.1 | 0.2 |
| 13 | SCMX | −7.8 | 39.9 | 5.0 |
| Series | Baseline | N | E | U | L | Series | Baseline | N | E | U | L |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | LUZH_SCBZ | 0.3 | −0.4 | 1.6 | 0.1 | 33 | SCMB_SCSM | −3.1 | 2.8 | −0.4 | −3.7 |
| 2 | LUZH_SCJU | 0.5 | −0.2 | 1.6 | −0.2 | 34 | SCMB_SCSN | −0.1 | −0.2 | −1.5 | −0.2 |
| 3 | LUZH_SCMB | 0.7 | −0.4 | 1.1 | 0.3 | 35 | SCMB_SCTQ | −1.3 | 1.2 | −1.0 | −1.7 |
| 4 | LUZH_SCNC | −0.4 | −0.5 | 0.9 | −0.5 | 36 | SCMB_SCXD | −5.4 | 2.6 | −0.9 | 0.3 |
| 5 | LUZH_SCSN | 0.7 | −0.6 | −0.3 | 0.7 | 37 | SCMB_SCYX | −4.5 | 2.5 | −2.7 | −1.5 |
| 6 | SCBZ_SCGU | 0.3 | 0.4 | −1.0 | −0.1 | 38 | SCML_SCMN | 2.7 | −8.7 | 2.3 | −6.5 |
| 7 | SCBZ_SCNC | −0.7 | −0.2 | −0.6 | 0.7 | 39 | SCML_SCXC | 2.7 | −7.4 | 2.8 | 7.5 |
| 8 | SCDF_SCJL | −6.2 | −4.1 | −1.0 | 5.5 | 40 | SCML_SCYY | 1.5 | −10.3 | 2.3 | −5.4 |
| 9 | SCDF_SCLH | 0.3 | 2.5 | −1.1 | −1.5 | 41 | SCMN_SCSM | 4.7 | −0.5 | 0.4 | 4.6 |
| 10 | SCDF_SCLT | −3.6 | 0.2 | −0.2 | 2.7 | 42 | SCMN_SCXD | 2.5 | −0.8 | −0.1 | −1.1 |
| 11 | SCDF_SCSM | −0.5 | −5.0 | 0.3 | −2.2 | 43 | SCMN_SCYX | 3.3 | −0.9 | −1.7 | 1.8 |
| 12 | SCDF_SCTQ | 1.4 | −6.8 | −0.1 | −6.5 | 44 | SCMN_SCYY | −1.3 | −1.2 | 0.0 | 1.7 |
| 13 | SCDF_SCXJ | 4.7 | −3.5 | −1.6 | −3.3 | 45 | SCMX_SCNC | −2.1 | −7.9 | −3.9 | −6.5 |
| 14 | SCGU_SCMX | 0.8 | 7.2 | 4.7 | −7.0 | 46 | SCMX_SCSN | −0.9 | −7.8 | −5.3 | −5.5 |
| 15 | SCGU_SCNC | −1.0 | −0.4 | 0.1 | 1.0 | 47 | SCMX_SCSP | −3.1 | −1.9 | −4.4 | −2.6 |
| 16 | SCGU_SCSP | −2.3 | 5.3 | 0.0 | −5.6 | 48 | SCMX_SCTQ | −2.0 | −6.5 | −5.2 | 5.2 |
| 17 | SCGZ_SCLH | −1.2 | −2.3 | −1.1 | −1.7 | 49 | SCMX_SCXJ | 1.4 | −3.3 | −6.7 | 2.3 |
| 18 | SCGZ_SCLT | −4.5 | −5.2 | −1.4 | 4.0 | 50 | SCNC_SCSN | 1.2 | −0.1 | −0.7 | −1.0 |
| 19 | SCGZ_SCSP | −1.0 | −6.8 | −0.4 | −6.7 | 51 | SCNN_SCPZ | −1.2 | −1.9 | −0.5 | 2.3 |
| 20 | SCGZ_SCXC | −6.6 | −8.2 | −0.6 | 7.1 | 52 | SCNN_SCXD | 3.1 | 1.0 | −0.9 | 2.8 |
| 21 | SCJL_SCLT | 2.8 | 3.6 | −0.9 | −0.9 | 53 | SCNN_SCYY | −0.7 | 0.6 | −0.9 | −0.8 |
| 22 | SCJL_SCML | −1.7 | 8.2 | −2.8 | 0.2 | 54 | SCPZ_SCXC | 1.6 | 5.0 | 0.7 | −1.6 |
| 23 | SCJL_SCMN | 1.1 | −0.5 | −0.6 | −1.1 | 55 | SCPZ_SCYY | 0.5 | 3.2 | 0.0 | −0.2 |
| 24 | SCJL_SCSM | 5.8 | −1.1 | −0.2 | 0.6 | 56 | SCSM_SCTQ | 1.8 | −1.6 | −0.6 | 1.1 |
| 25 | SCJL_SCXC | 0.9 | 0.7 | 0.2 | −0.7 | 57 | SCSM_SCYX | −1.4 | −0.4 | −2.1 | 1.2 |
| 26 | SCJU_SCMB | 0.1 | −0.1 | −0.5 | 0.2 | 58 | SCSN_SCTQ | −1.3 | 1.4 | 0.5 | −1.2 |
| 27 | SCJU_SCNN | −8.3 | 1.2 | −0.8 | 3.7 | 59 | SCSP_SCXJ | 4.6 | −1.4 | −1.9 | −3.1 |
| 28 | SCLH_SCLT | −3.4 | −2.9 | −0.1 | 4.0 | 60 | SCTQ_SCXJ | 3.4 | 3.2 | −1.6 | 2.1 |
| 29 | SCLH_SCSP | 0.3 | −4.5 | 0.5 | −3.9 | 61 | SCXC_SCYY | −1.3 | −2.9 | −0.5 | −1.2 |
| 30 | SCLH_SCXJ | 4.9 | −6.3 | −1.4 | −7.3 | 62 | SCXD_SCYX | 0.9 | −0.1 | −1.5 | 0.8 |
| 31 | SCLT_SCXC | −2.0 | −2.9 | 0.9 | 2.8 | 63 | SCXD_SCYY | −3.7 | −0.4 | 0.2 | 3.0 |
| 32 | SCMB_SCNN | −8.5 | 1.5 | −0.4 | 7.3 |
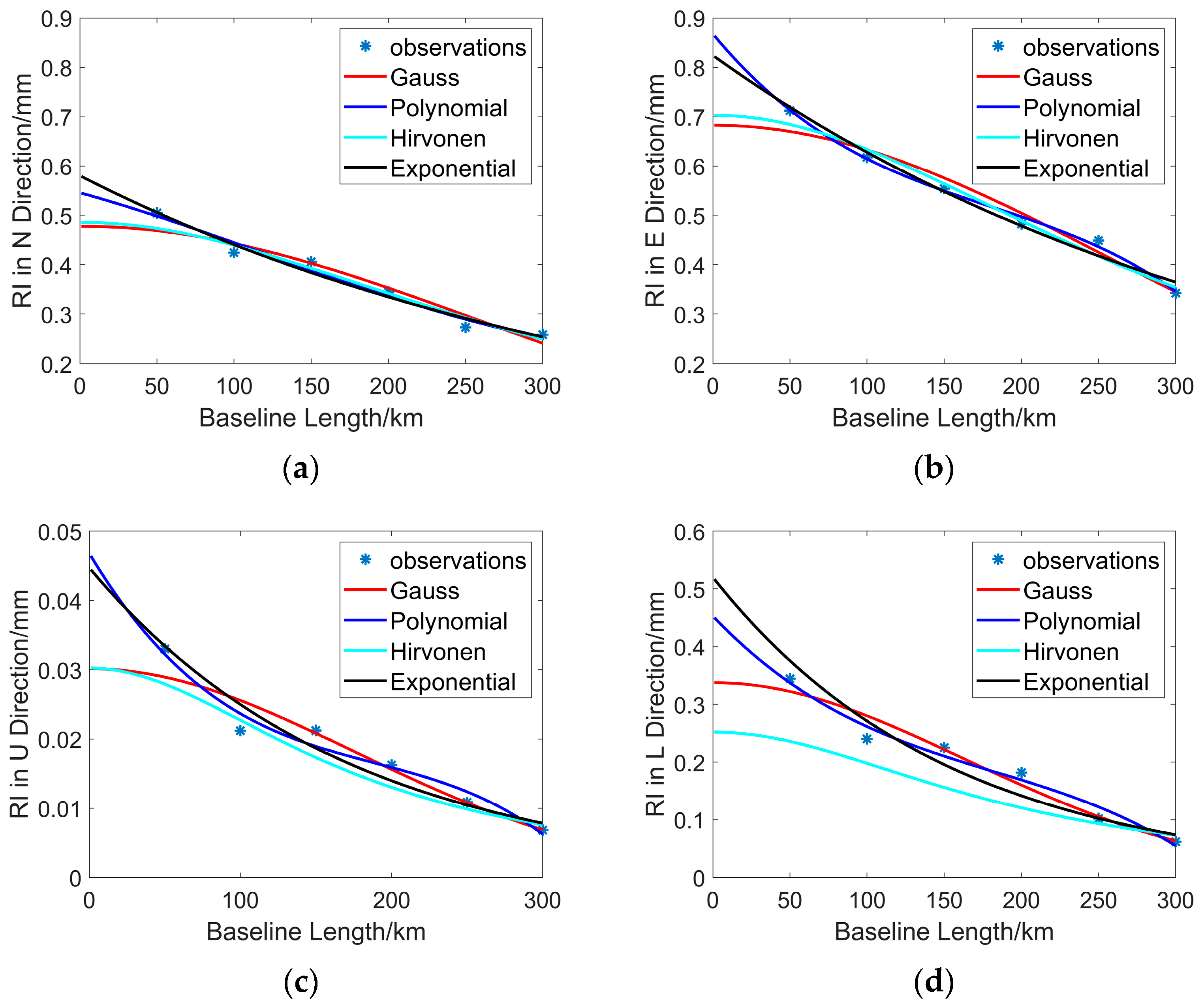
| Statistics | Gauss | Hirvonen | Polynomial | Exponential | |
|---|---|---|---|---|---|
| N | MAX | 3.58 | 3.14 | 2.03 | 2.17 |
| MIN | 0.28 | 0.27 | 0.57 | 0.10 | |
| AVE | 1.78 | 1.52 | 1.22 | 1.20 | |
| RMS | 2.08 | 1.76 | 1.34 | 1.41 | |
| E | MAX | 4.21 | 3.14 | 1.47 | 3.09 |
| MIN | 0.24 | 0.65 | 0.16 | 0.37 | |
| AVE | 2.12 | 1.72 | 0.66 | 1.33 | |
| RMS | 2.42 | 1.95 | 0.83 | 1.66 | |
| U | MAX | 0.44 | 0.51 | 0.25 | 0.38 |
| MIN | 0.01 | 0.08 | 0.04 | 0.04 | |
| AVE | 0.16 | 0.26 | 0.13 | 0.17 | |
| RMS | 0.25 | 0.30 | 0.16 | 0.21 | |
| L | MAX | 3.98 | 10.85 | 2.12 | 4.03 |
| MIN | 0.14 | 0.88 | 0.68 | 0.02 | |
| AVE | 1.53 | 5.02 | 1.38 | 2.40 | |
| RMS | 2.07 | 6.10 | 1.49 | 2.76 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Zhang, S.; Wang, B.; Jiang, G.; Cheng, C.; Zhou, X.; Feng, Z.; Li, J. A Novel Method for Analyzing the Spatiotemporal Characteristics of GNSS Time Series: A Case Study in Sichuan Province, China. Appl. Sci. 2024, 14, 432. https://doi.org/10.3390/app14010432
Chen X, Zhang S, Wang B, Jiang G, Cheng C, Zhou X, Feng Z, Li J. A Novel Method for Analyzing the Spatiotemporal Characteristics of GNSS Time Series: A Case Study in Sichuan Province, China. Applied Sciences. 2024; 14(1):432. https://doi.org/10.3390/app14010432
Chicago/Turabian StyleChen, Xiongchuan, Shuangcheng Zhang, Bin Wang, Guangwei Jiang, Chuanlu Cheng, Xin Zhou, Zhijie Feng, and Jingtao Li. 2024. "A Novel Method for Analyzing the Spatiotemporal Characteristics of GNSS Time Series: A Case Study in Sichuan Province, China" Applied Sciences 14, no. 1: 432. https://doi.org/10.3390/app14010432
APA StyleChen, X., Zhang, S., Wang, B., Jiang, G., Cheng, C., Zhou, X., Feng, Z., & Li, J. (2024). A Novel Method for Analyzing the Spatiotemporal Characteristics of GNSS Time Series: A Case Study in Sichuan Province, China. Applied Sciences, 14(1), 432. https://doi.org/10.3390/app14010432