
A New Order Tracking Method for Fault Diagnosis of Gearbox under Non-Stationary Working Conditions Based on In Situ Gravity Acceleration Decomposition



Abstract
1. Introduction
- (1)
- A new gravity acceleration decomposition method is proposed for rotational speed estimation.
- (2)
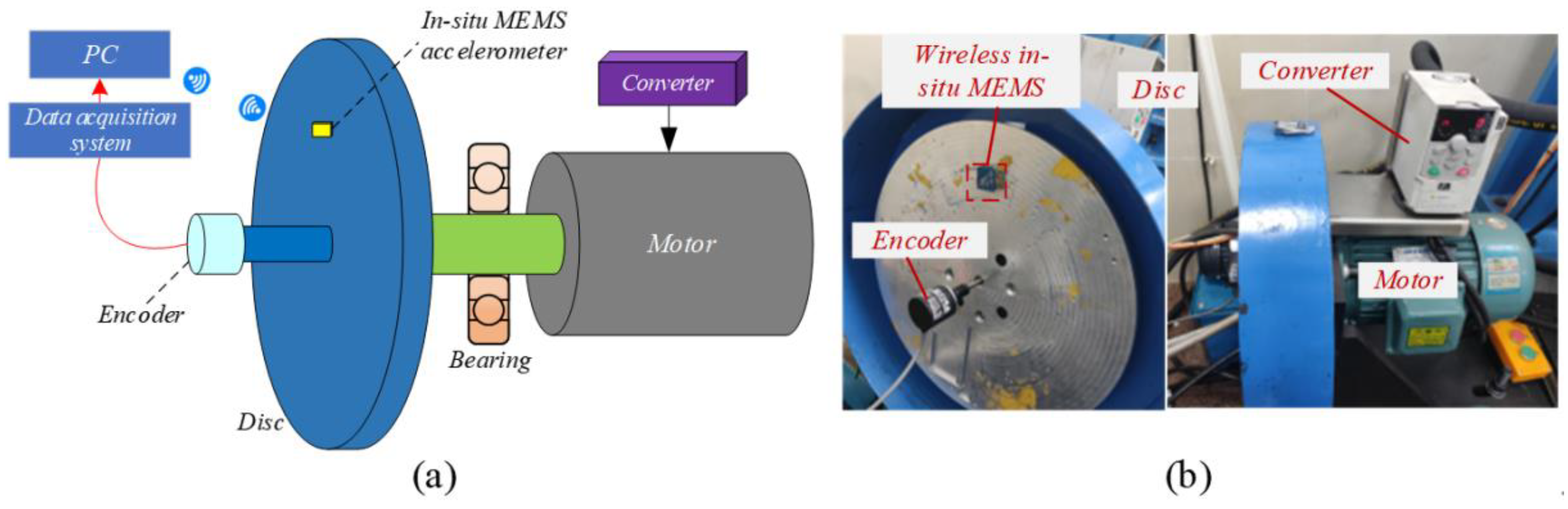
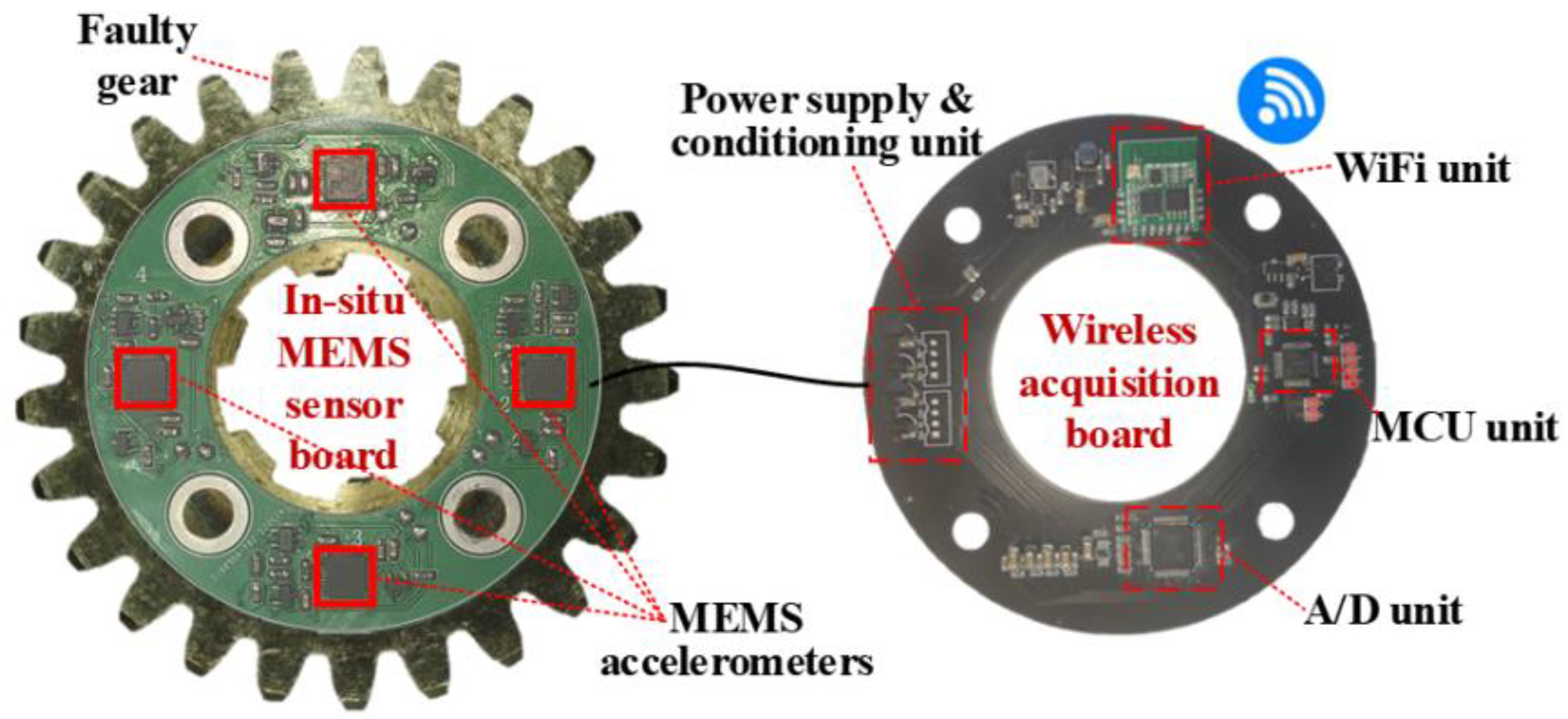
- The time-varying gravity acceleration component is sensed by a tangentially mounted in situ MEMS accelerometer.
- (3)
- The proposed method yields better results in terms of order tracking than traditional vibration-based tacholess methods for fault diagnosis of a gearbox.
2. Principle of Rotational Speed Estimation Based on In Situ MEMS Accelerometer
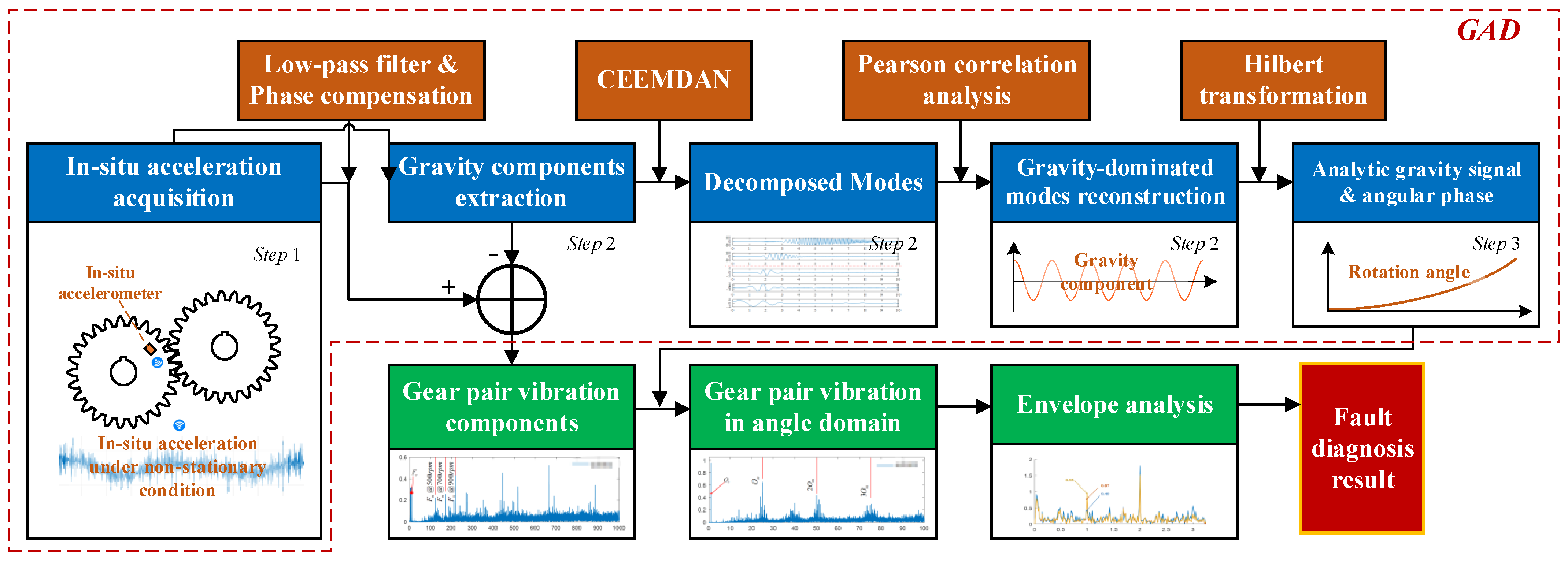
3. Order Tracking Based on the Proposed GAD Method
3.1. The Main Procedure of the GAD Method
3.1.1. Linear-Phase Filter for Gravity Acceleration Component Detection
3.1.2. Noise Suppression for Gravity Acceleration Component Based on CEEMDAN
- Step 1: First IMF detection from the gravity acceleration component Sgc[n].
- Step 2: First residue r1[n] calculation.
- Step 3: Second IMF detection from residue r1[n].
- Step 4: kth residue rk[n] calculation.
- Step 5: (k + 1)th IMF detection.
- Step 6: Repetition of step 4 and 5.
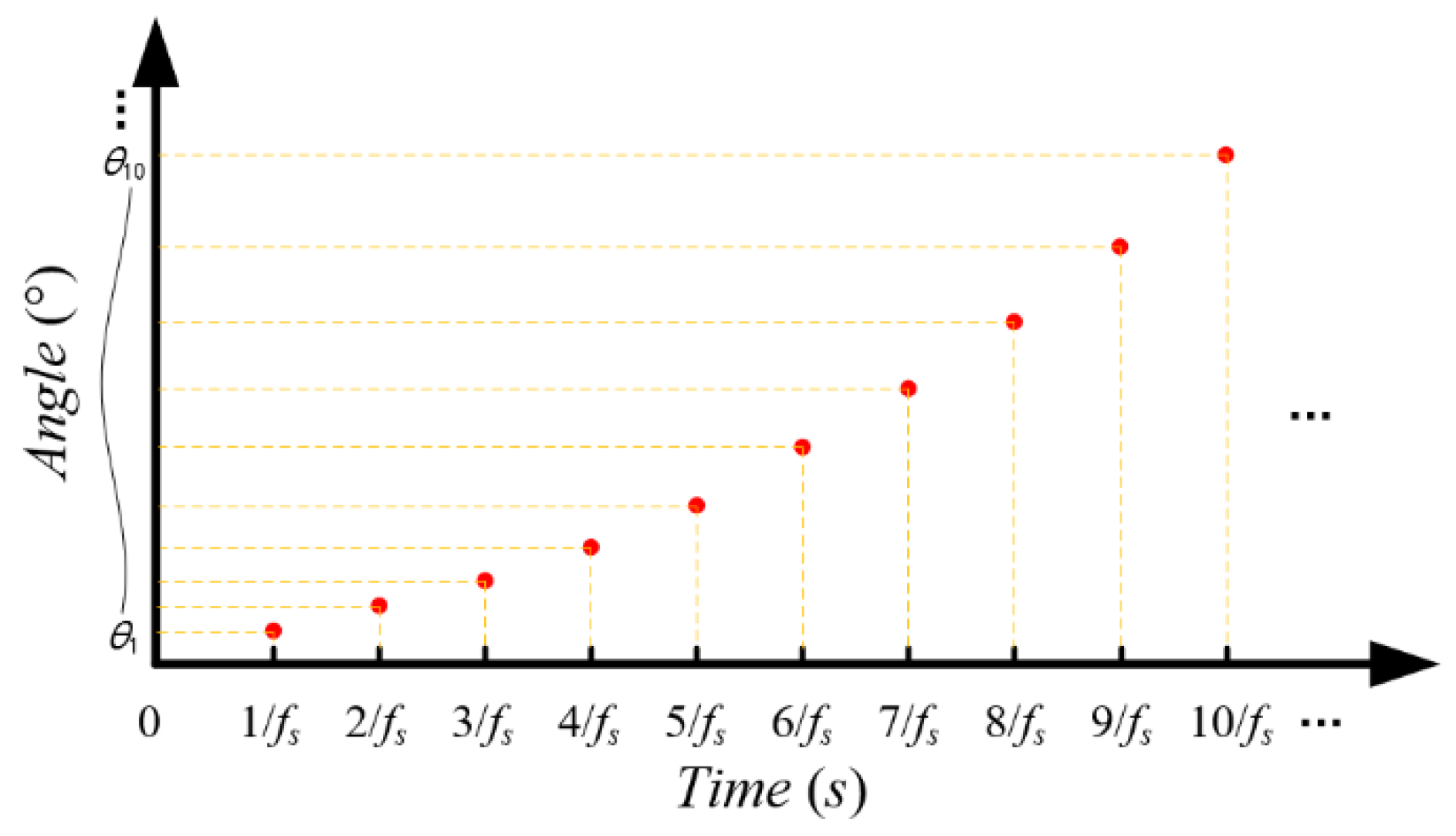
3.2. Rotational Speed Estimation and Order Tracking
4. Validation of the Rotational Speed Estimation Principle Using GAD
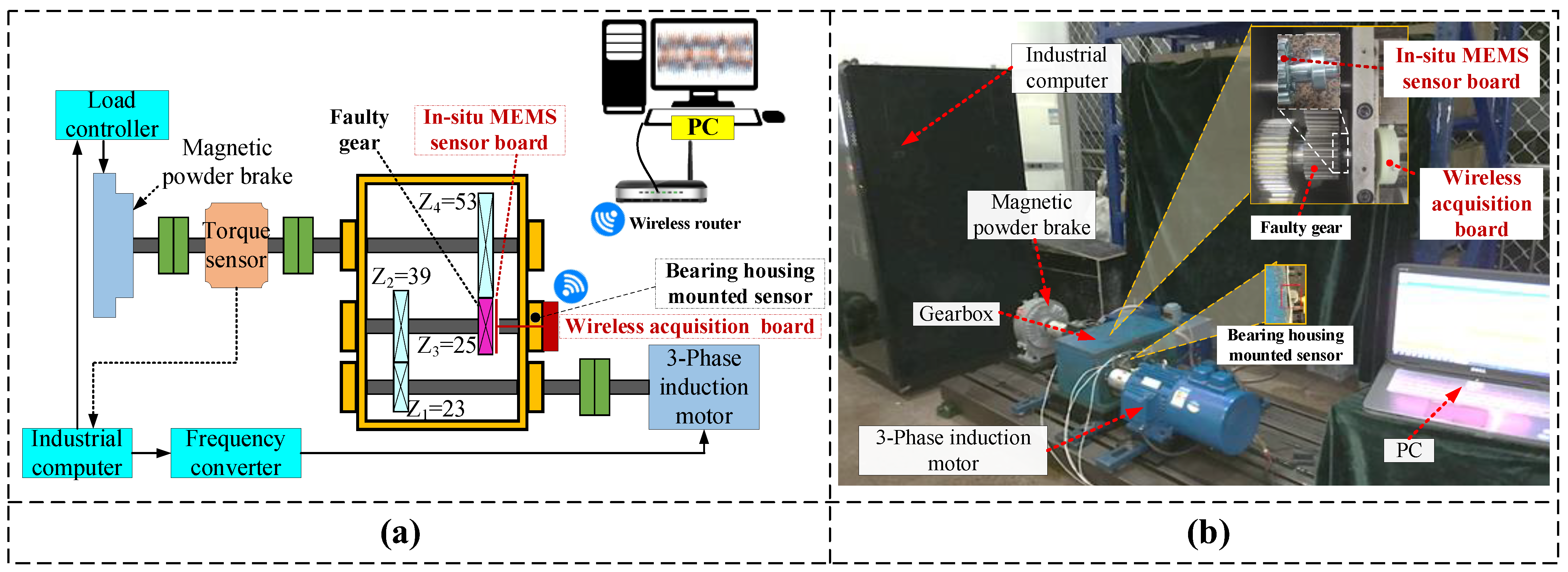
4.1. Experimental Setup
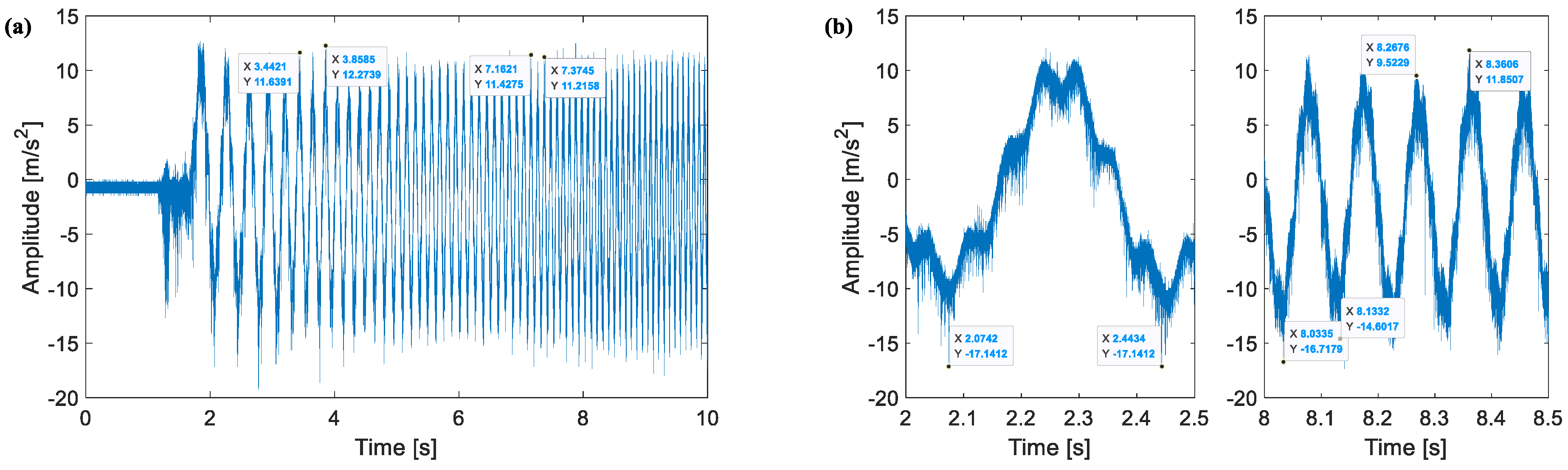
4.2. Speed Estimation Result Comparisons
- (i)
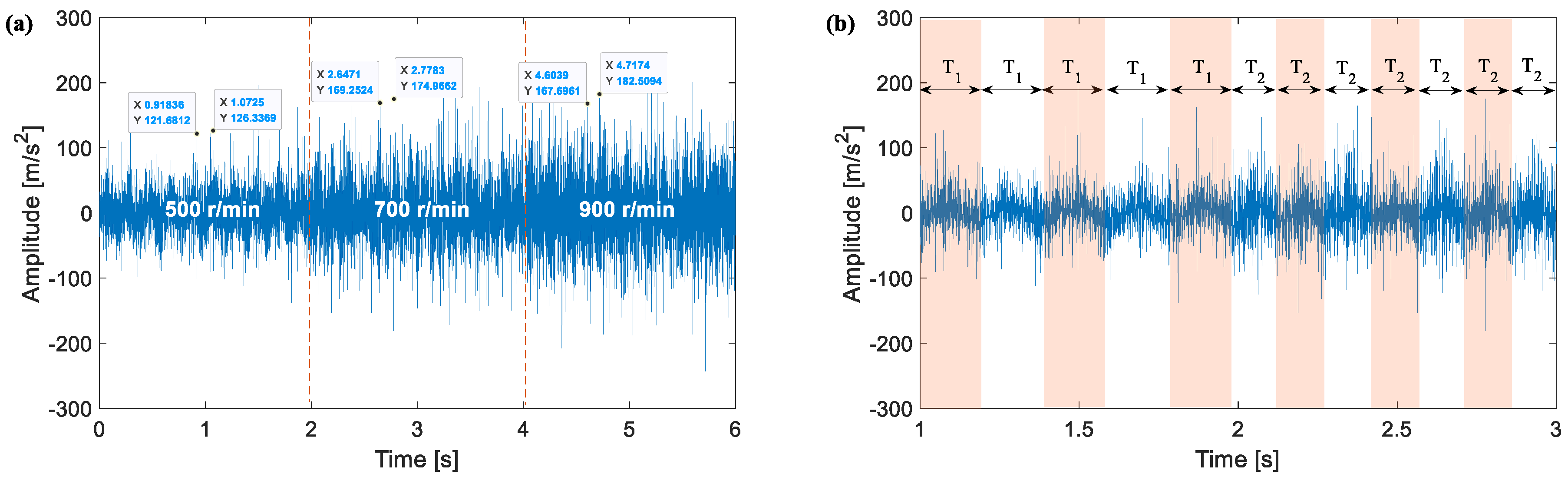
- Test 01: startup working condition
- (ii)
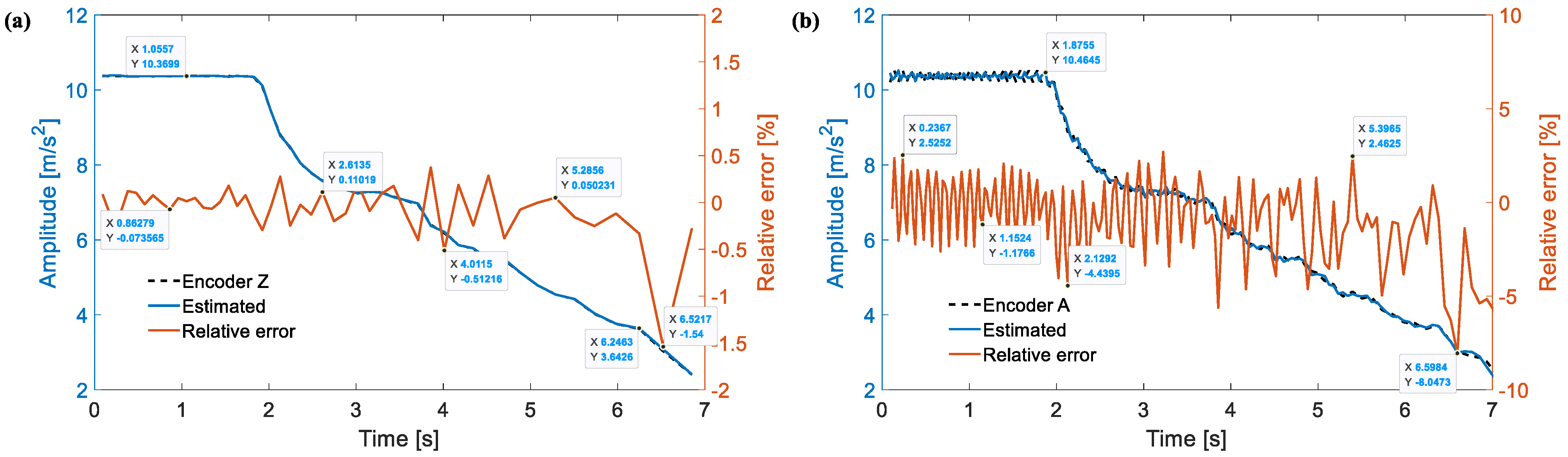
- Test 02: run-down working condition
5. Application in Order Tracking for Fault Diagnosis of Gearbox
6. Conclusions
- (1)
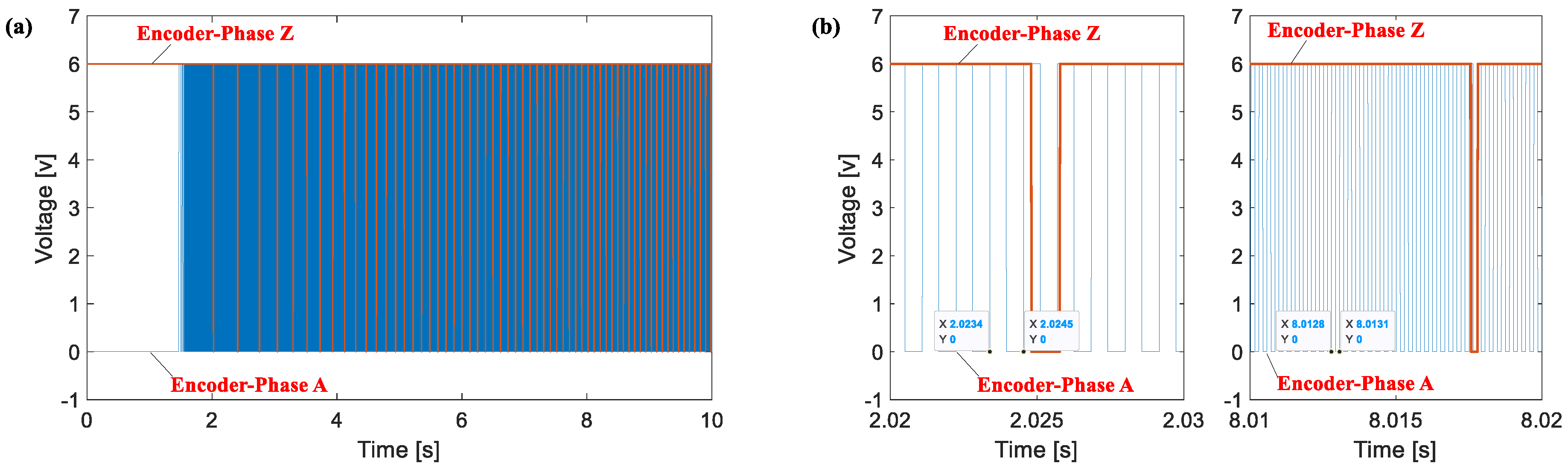
- The principle of estimating rotational speed based on decoupling the gravity acceleration component from the tangential in situ accelerometer measurements is indeed feasible. By employing techniques such as filtering or signal processing algorithms, the gravity component can be separated from the tangential acceleration component, enabling the calculation of rotational speed.
- (2)
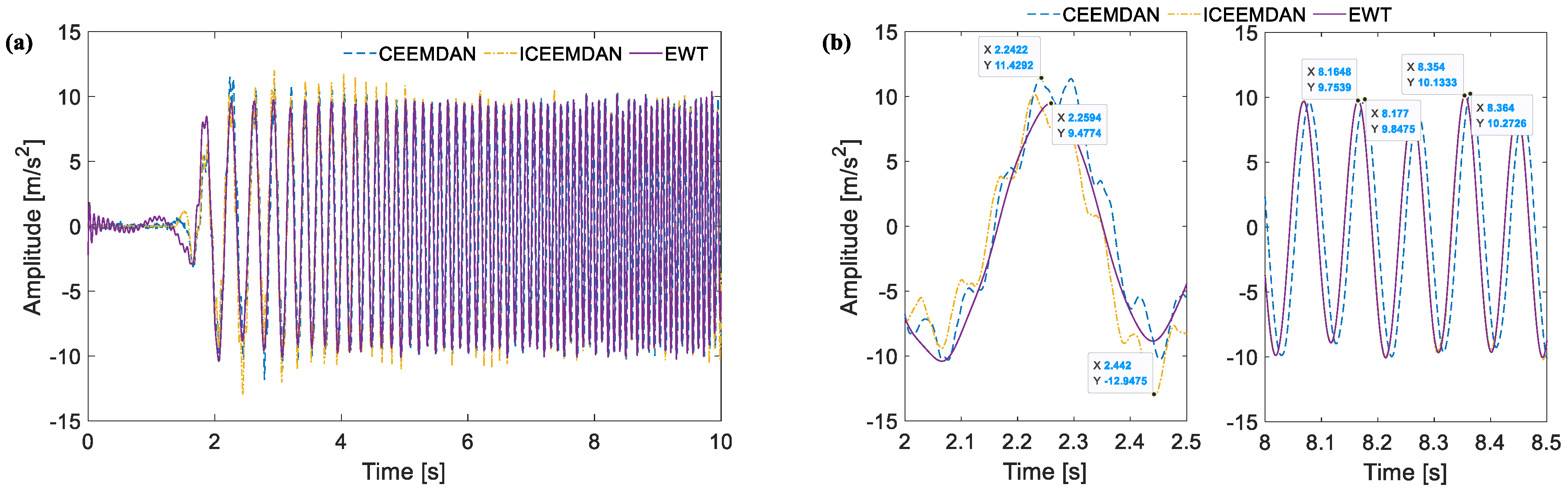
- The utilization of the CEEMDAN, ICEEMDAN and EWT methods for decomposition and reconstruction reveals minimal differences among the three approaches. As a result, these minor variations are likely to have a negligible impact on the estimation errors of the rotational speed. This suggests that the choice of decomposition technique, within the range of these three methods, may not significantly affect the overall accuracy of rotational speed estimation.
- (3)
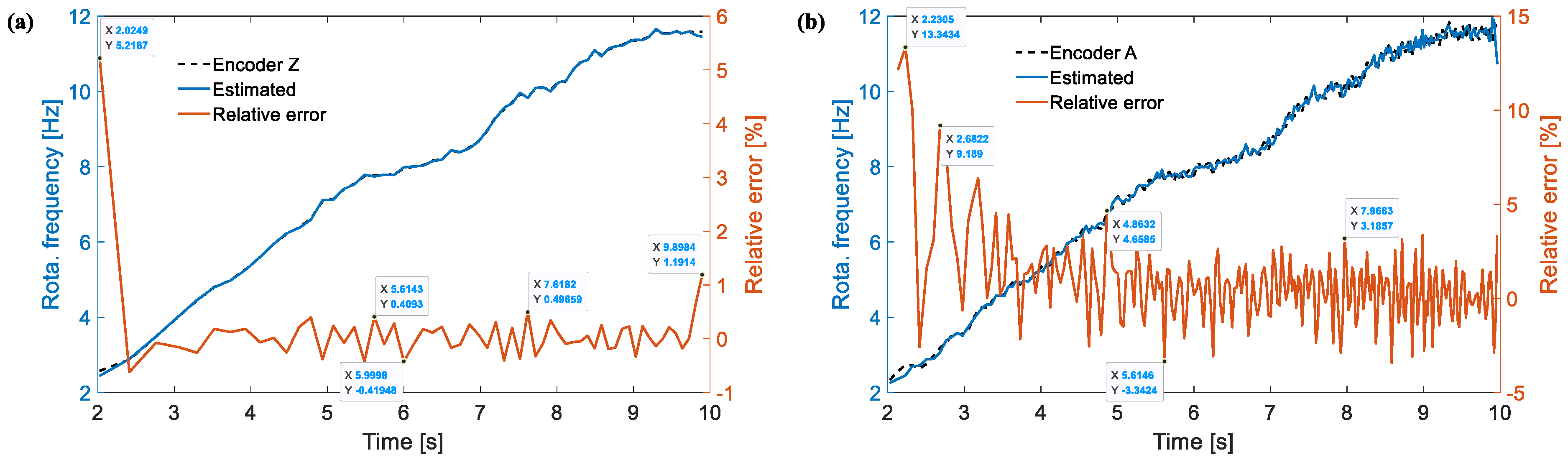
- The proposed method demonstrates satisfactory estimation performance for both average and instantaneous rotational speeds. Specifically, the majority of the relative estimation errors for the average rotational speeds are confined to within ±0.5%, indicating a high level of accuracy. Similarly, for the instantaneous rotational speeds, most of the relative estimation errors are within ±5%, demonstrating a reasonable degree of precision compared to encoder-based measurement methods.
- (4)
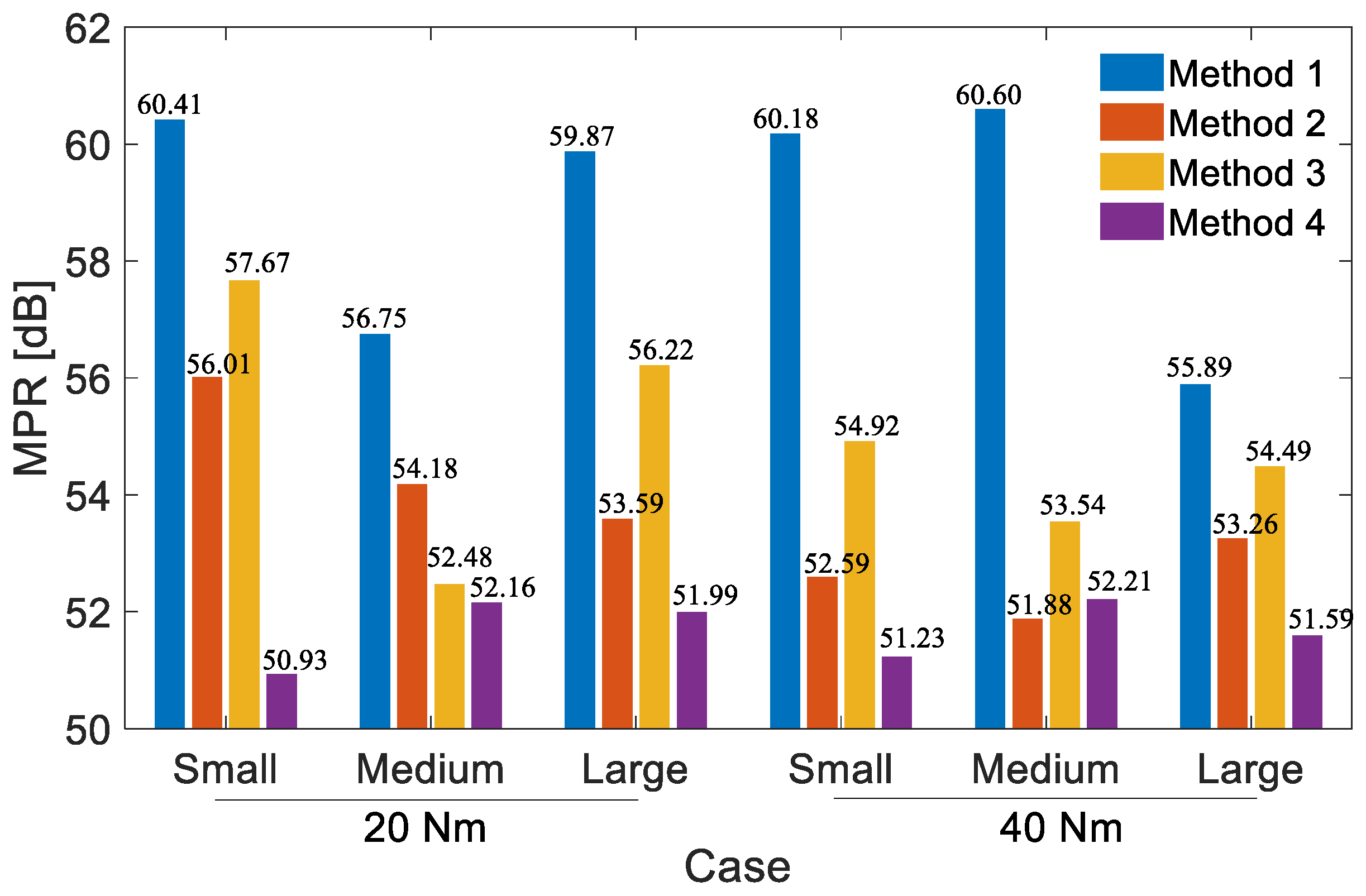
- The proposed method exhibits superior performance in rotational speed estimation and order tracking within gearboxes, achieving an average gain of 5.36 dB over Method 2, 4.06 dB over Method 3 and a substantial 7.27 dB over Method 4.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hong, L.; Qu, Y.Z.; Dhupia, J.S.; Sheng, S.; Tan, Y.; Zhou, Z. A novel vibration-based fault diagnostic algorithm for gearboxes under speed fluctuations without rotational speed measurement. Mech. Syst. Signal Process. 2017, 94, 14–32. [Google Scholar] [CrossRef]
- Chen, Z.G.; Zhou, Z.W.; Zhai, W.M.; Wang, K. Improved analytical calculation model of spur gear mesh excitations with tooth profile deviations. Mech. Mach. Theory 2020, 149, 103838. [Google Scholar] [CrossRef]
- Liu, J.; Wang, L.F.; Shi, Z.F. Dynamic modelling of the defect extension and appearance in a cylindrical roller bearing. Mech. Syst. Signal Process. 2022, 173, 109040. [Google Scholar] [CrossRef]
- Liu, Y.Y.; Wen, H.; Ding, Z.Y.; Xu, L.; Chen, H.; Smulko, J. An Instantaneous Engine Speed Estimation Method Using Multiple Matching Synchrosqueezing Transform. J. Sens. 2021, 2021, 6650432. [Google Scholar] [CrossRef]
- Singh, G.; Kumar, T.C.; Naikan, V.N. Speed estimation of rotating machinery using generated harmonics. Comput. Electr. Eng. 2018, 72, 420–430. [Google Scholar] [CrossRef]
- Zeng, Q.; Feng, G.J.; Shao, Y.M.; Devitt, J.; Gu, F.; Ball, A. An accurate instantaneous angular speed estimation method based on a dual detector setup. Mech. Syst. Signal Process. 2020, 140, 106674. [Google Scholar] [CrossRef]
- Zhao, M.; Jia, X.; Lin, J.; Lei, Y.; Lee, J. Instantaneous speed jitter detection via encoder signal and its application for the diagnosis of planetary gearbox. Mech. Syst. Signal Process. 2018, 98, 16–31. [Google Scholar] [CrossRef]
- Shao, Y.M.; Su, D.Z.; Al-Habaibeh, A.; Yu, W. A new fault diagnosis algorithm for helical gears rotating at low speed using an optical encoder. Measurement 2016, 93, 449–459. [Google Scholar] [CrossRef]
- Chin, Z.Y.; Smith, W.A.; Borghesani, P.; Randall, R.B.; Peng, Z. Absolute transmission error: A simple new tool for assessing gear wear. Mech. Syst. Signal Process. 2021, 146, 107070. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, G.H.; Chen, X.B.; Chen, R.; Xie, J.; Tian, P.; Zhang, S.; Wu, Q. Bearing fault diagnosis method based on angular domain resampling, relative position matrix and transfer learning. Meas. Sci. Technol. 2024, 35, 076118. [Google Scholar] [CrossRef]
- Lu, S.L.; Yan, R.Q.; Liu, Y.B.; Wang, Q. Tacholess Speed Estimation in Order Tracking: A Review with Application to Rotating Machine Fault Diagnosis. IEEE Trans. Instrum. Meas. 2019, 68, 2315–2332. [Google Scholar] [CrossRef]
- Lei, Y.G.; Li, N.P.; Guo, L.; Li, N.; Yan, T.; Lin, J. Machinery health prognostics: A systematic review from data acquisition to RUL prediction. Mech. Syst. Signal Process. 2018, 104, 799–834. [Google Scholar] [CrossRef]
- Garcia-Calva, T.; Morinigo-Sotelo, D.; Mwata-Velu, T.; Garcia-Perez, A.; Uribe, K. Rotor speed estimation for half-broken bar detection in induction motors using Kalman filtering. Meas. Sci. Technol. 2024, 35, 076115. [Google Scholar] [CrossRef]
- Wang, X.X.; Guo, J.; Lu, S.L.; Shen, C.; He, Q. A computer-vision-based rotating speed estimation method for motor bearing fault diagnosis. Meas. Sci. Technol. 2017, 28, 065012. [Google Scholar] [CrossRef]
- Hu, Z.H.; Wang, J.X.; Wang, G.X.; Wen, S.; Li, Z. Extraction of time-frequency ridge line based on automatic peak search and curve fitting. Eng. Res. Express 2024, 6, 025502. [Google Scholar] [CrossRef]
- Combet, F.; Zimroz, R. A new method for the estimation of the instantaneous speed relative fluctuation in a vibration signal based on the short time scale transform. Mech. Syst. Signal Process. 2009, 23, 1382–1397. [Google Scholar] [CrossRef]
- Li, C.; Sanchez, V.; Zurita, G.; Lozada, M.C.; Cabrera, D. Rolling element bearing defect detection using the generalized synchrosqueezing transform guided by time-frequency ridge enhancement. ISA Trans. 2016, 60, 274–284. [Google Scholar] [CrossRef] [PubMed]
- Urbanek, J.; Barszcz, T.; Antoni, J. A two-step procedure for estimation of instantaneous rotational speed with large fluctuations. Mech. Syst. Signal Process. 2013, 38, 96–102. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, G.H.; Zhang, Q.; Liu, D.; Jiang, K. Rotating speed isolation and its application to rolling element bearing fault diagnosis under large speed variation conditions. J. Sound Vib. 2015, 348, 381–396. [Google Scholar] [CrossRef]
- Rodopoulos, K.; Yiakopoulos, C.; Antoniadis, I. A parametric approach for the estimation of the instantaneous speed of rotating machinery. Mech. Syst. Signal Process. 2014, 44, 31–46. [Google Scholar] [CrossRef]
- Barrios, M.L.R.; Montero, F.E.H.; Mancilla, J.C.G.; Marín, E.P. Tacho-less automatic rotational speed estimation (TARSE) for a mechanical system with gear pair under non-stationary conditions. Measurement 2019, 145, 480–494. [Google Scholar] [CrossRef]
- Mousavi, M.; Mostafavi, A.; Moradi, M.; Chaibakhsh, A.; Kordestani, M.; Derakhshanfar, M.; Saif, M. Robust Fault Isolation of Gas Turbines via Nonlinear Intelligent Observer and Takagi-Sugeno Fuzzy Inference System. IEEE Sens. J. 2023, 23, 25075–25085. [Google Scholar] [CrossRef]
- Torres, M.E.; Colominas, M.A.; Schlotthauer, G.; Flandrin, P. A complete ensemble empirical mode decomposition with adaptive noise. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 4144–4147. [Google Scholar]
- Wang, L.M.; Shao, Y.M.; Cao, Z. Optimal demodulation subband selection for sun gear crack fault diagnosis in planetary gearbox. Measurement 2018, 125, 554–563. [Google Scholar] [CrossRef]
- Rakshit, H.; Ullah, M.A. A Comparative Study on Window Functions for Designing Efficient FIR Filter. In Proceedings of the 2014 9th International Forum on Strategic Technology (IFOST), Cox’s Bazar, Bangladesh, 21–23 October 2014; pp. 91–96. [Google Scholar]
- Wang, L.M.; Shao, Y.M. Fault feature extraction of rotating machinery using a reweighted complete ensemble empirical mode decomposition with adaptive noise and demodulation analysis. Mech. Syst. Signal Process. 2020, 138, 106545. [Google Scholar] [CrossRef]
- Elouaham, S.; Nassiri, B.; Dliou, A.; Zougagh, H.; El Kamoun, N.; El Khadiri, K.; Said, S. Combination time frequency and empirical wavelet transform methods for removal of composite noise in EMG signals. TELKOMNIKA Telecommun. Comput. Electron. Control 2023, 21, 1373–1381. [Google Scholar] [CrossRef]
- Gao, H.F.; Xu, T.X.; Li, R.L.; Cai, C. Gearbox Fault Diagnosis Based on ICEEMDAN-MPE-AWT and SE-ResNeXt50 Transfer Learning Model. Appl. Sci. 2024, 14, 2565. [Google Scholar] [CrossRef]
- Zhang, X.; Miao, Q.; Zhang, H.; Wang, L. A parameter-adaptive VMD method based on grasshopper optimization algorithm to analyze vibration signals from rotating machinery. Mech. Syst. Signal Process. 2018, 108, 58–72. [Google Scholar] [CrossRef]
- Schmidt, S.; Heyns, P.S.; De Villiers, J.P. A tacholess order tracking methodology based on a probabilistic approach to incorporate angular acceleration information into the maxima tracking process. Mech. Syst. Signal Process. 2018, 100, 630–646. [Google Scholar] [CrossRef]
- Dliou, A.; Latif, R.; Laaboubi, M.; Maoulainine, F.; Elouaham, S. Noised abnormal ECG signal analysis by combining EMD and Choi-Williams techniques. In Proceedings of the 2012 IEEE International Conference on Complex Systems (ICCS), Agadir, Morocco, 5–6 November 2012; pp. 1–5. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Preset Rotation Speed | |||
|---|---|---|---|---|
| 310 r/min | 410 r/min | 520 r/min | 620 r/min | |
| Encoder Z | 307.90~311.22 | 412.35~412.78 | 519.97~520.72 | 621.95~622.55 |
| Estimated average speed | 309.47~313.15 | 408.43~416.12 | 516.14~524.58 | 617.36~627.47 |
| Error | −0.74~0.45% | −0.83~1.02% | −0.92~0.82% | −0.81~0.79% |
| Encoder A | 306.23~313.84 | 406.74~417.63 | 512.80~527.14 | 613.22~630.44 |
| Estimated instantaneous speed | 303.20~318.64 | 401.39~426.50 | 500.25~537.17 | 605.45~636.76 |
| Error | −3.61~3.63% | −4.85~3.72% | −3.55~3.59% | −3.80~3.15% |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Module (mm) | 3 | Pressure angle (°) | 20 |
| Tip clearance (mm) | 0.25 | Addendum (mm) | 1 |
| Tooth width (mm) | 60 |
| Load | Small Fault | Medium Fault | Large Fault |
|---|---|---|---|
| 20 Nm | #1 | #2 | #3 |
| 40 Nm | #4 | #5 | #6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Chen, Z.; Wang, L. A New Order Tracking Method for Fault Diagnosis of Gearbox under Non-Stationary Working Conditions Based on In Situ Gravity Acceleration Decomposition. Appl. Sci. 2024, 14, 4742. https://doi.org/10.3390/app14114742
Li Y, Chen Z, Wang L. A New Order Tracking Method for Fault Diagnosis of Gearbox under Non-Stationary Working Conditions Based on In Situ Gravity Acceleration Decomposition. Applied Sciences. 2024; 14(11):4742. https://doi.org/10.3390/app14114742
Chicago/Turabian StyleLi, Yanlei, Zhongyang Chen, and Liming Wang. 2024. "A New Order Tracking Method for Fault Diagnosis of Gearbox under Non-Stationary Working Conditions Based on In Situ Gravity Acceleration Decomposition" Applied Sciences 14, no. 11: 4742. https://doi.org/10.3390/app14114742
APA StyleLi, Y., Chen, Z., & Wang, L. (2024). A New Order Tracking Method for Fault Diagnosis of Gearbox under Non-Stationary Working Conditions Based on In Situ Gravity Acceleration Decomposition. Applied Sciences, 14(11), 4742. https://doi.org/10.3390/app14114742