
Enhanced Berth Mapping and Clothoid Trajectory Prediction Aided Intelligent Underground Localization



Abstract
:1. Introduction
2. Literature Review
- We introduce an enhanced berth mapping model that is tailored to underground parking scenes. This model, indexed by key berths, selects scene data reasonably and creates uniformly distributed map nodes. Each node includes three elements: holistic and local scene features extracted from an around-view image, and the global pose of the mapping vehicle calculated based on the positions of the key berth’s corner points. This representation model not only assists vehicles in achieving high-precision localization but also significantly reduces the memory requirements of the map.
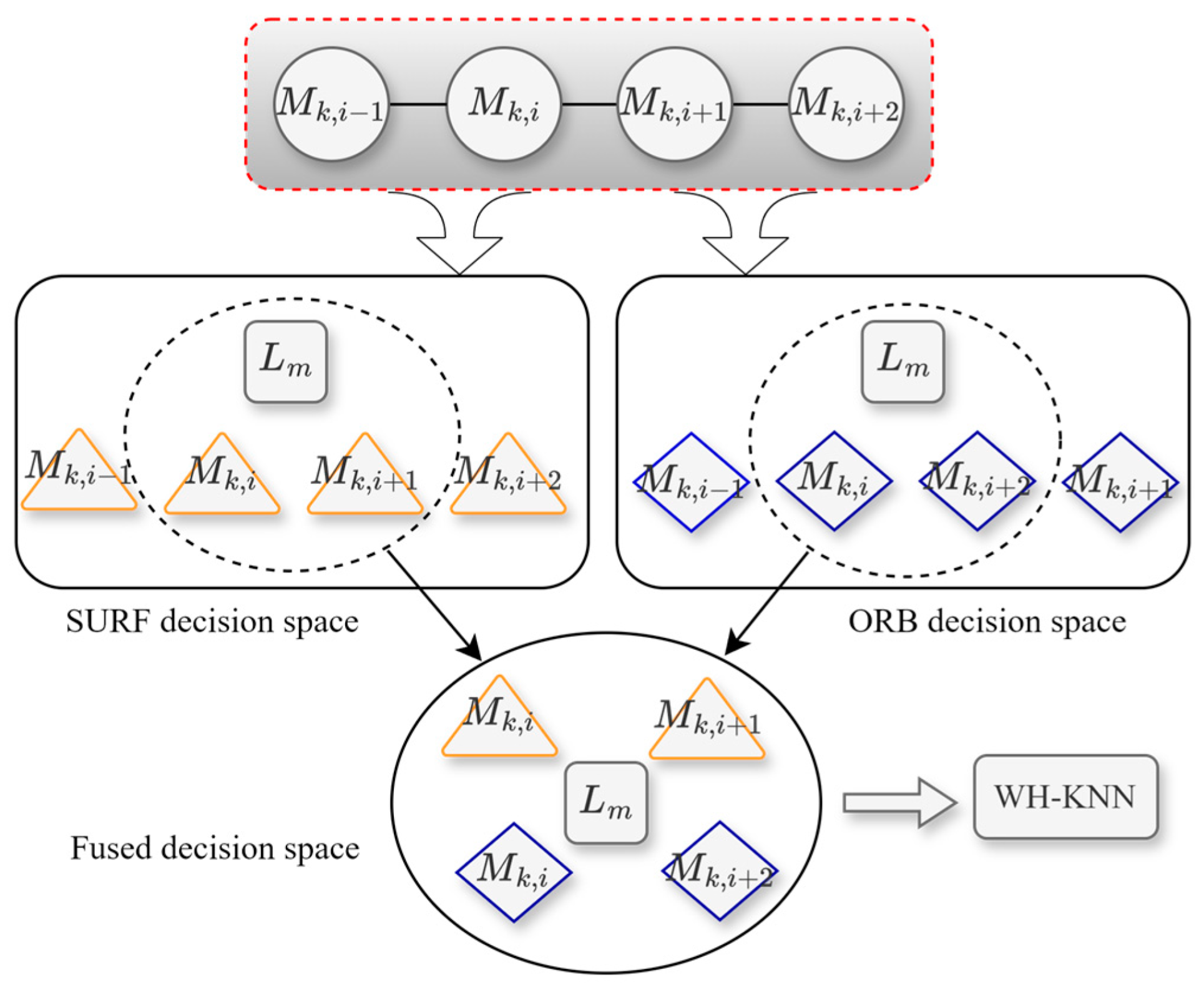
- We propose a multimodal localization method that is capable of rapid and high-precision vehicle localization with robustness. This method employs an adaptive localization strategy corresponding to the trajectory prediction result. A progressive localization strategy based on multi-scale feature matching is applied if the target node is within the map coverage range. This includes rough localization based on the trajectory prediction, node-level localization integrating the holistic features and the weight hybrid k-nearest neighbor (WH-KNN) algorithm [50], and metric-level localization combining the local feature matching and prior pose. A compensation localization strategy combining odometry with prior pose is utilized if the node is outside the map coverage range.
3. Proposed Method
3.1. System Overview
3.2. Enhanced Berth Mapping
3.3. Localization Initialization
3.4. Trajectory Prediction with Clothoid
3.5. Nearest Map Node Search with WH-KNN
3.6. Metric Localization for Vehicle Pose
| Algorithm 1 Intelligent underground localization algorithm |
| Input: |
| KBD: Key berths data for constructing the lightweight map |
| LD: Localization data from AVM |
| Output: |
| PD: Precise global pose data of the intelligent vehicle |
| 1: function generateLightweightMap(KBD): |
| 2: Map ← initializeEmptyMap( ) |
| 3: for each DataNode in KBD: |
| 4: fholistic ← extractHolisticFeatures(DateNode.image) |
| 5: flocal ← extractLocalFeatures(DateNode.image) |
| 6: Pmap ← calculateGlobalPose(DateNode.cornerPoints) |
| 7: MapNode ← createNode(DateNode.id, fholistic, flocal, Pmap) |
| 8: Map.addNode(MapNode) |
| 9: end for |
| 10: return Map |
| 11: function trajectoryPrediction (VehicleTrajectory): |
| 12: if the VehicleTrajectory is a straight line: |
| 13: PPredict ← linearExtrapolation(VehicleTrajectory) |
| 14: else if the VehicleTrajectory is a curve: |
| 15: PPredict ← clothoidTheory(VehicleTrajectory) |
| 16: end if |
| 17: return PPredict |
| 18: function multimodalLocalization(QueryImage, PPredict, Map): |
| 19: if the PPredict is within the map coverage range: |
| 20: fqueryHolistic ← extractHolisticFeatures(QueryImage) |
| 21: fqueryLocal ← extractLocalFeatures(QueryImage) |
| 22: Mcandi ← coarseLocalization(PPredict, Map) |
| 23: Mnearest ← WH-KNN(fqueryHolistic, Mcandi) |
| 24: Pfinal ← metricLocalization(fqueryLocal, Mnearest) |
| 25: else if the PPredict is outside the map coverage range: |
| 26: fqueryLocal ← extractLocalFeatures(QueryImage) |
| 27: Pfinal ← odometryTheory(fqueryLocal) |
| 28: end if |
| 29: return Pfinal |
| 30: function mainProcess(KBD, LD): |
| 31: PD ← initializeEmptyResult( ) |
| 31: Map ← generateLightweightMap(KBD) |
| 32: for each LocalizationNode in LD: |
| 33: PPredict ← trajectoryPrediction(VehicleTrajectory) |
| 34: Pfinal ← multimodalLocalization(LocalizationNode.queryImage, PPredict, Map) |
| 35: PD.addPose(Pfinal) |
| 36: end for |
| 37: return PD |
4. Experimental Results
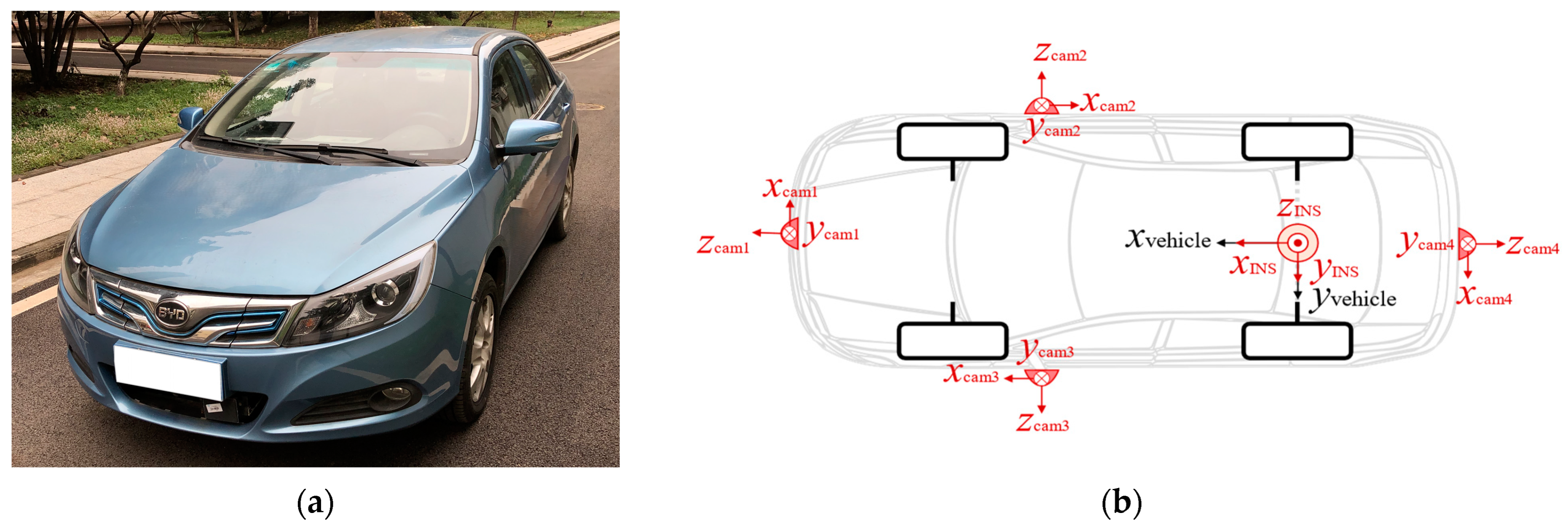
4.1. Scenes and Platforms Introduction
4.2. Datasets
4.3. Comparison Methods
4.4. Maps Construction
4.5. Localization Initialization Step
4.6. Trajectory Prediction Results
4.7. Nearest Map Node Search Results
4.8. Metric Localization Results
4.9. Time Consumption Results
5. Conclusions
- The proposed representation method constructed a lightweight map based on the scene data associated with the key berths, effectively compressing the memory requirements of the map while assisting the intelligent vehicles in achieving high-precision positioning. Additionally, it offered the advantages of a low mapping cost, a low maintenance cost, and high practicality.
- The proposed localization method achieved a trajectory prediction accuracy of 40 cm on multiple datasets from two typical underground parking scenes. Meanwhile, the accuracy of the nearest map node retrieval exceeded 92%, and the metric localization accuracy met the 30 cm standard. This demonstrated that the proposed localization method possessed high precision, robustness, and applicability to diverse scenes. Simultaneously, under varying lighting conditions for the same source data, the method controlled the differences in various indicators within a narrow range, showcasing its strong resistance to light interference.
- The proposed localization method, based on a lightweight enhanced berth map, utilized the distance between the holistic features to represent the similarity between the nodes, effectively reducing the localization time and achieving a localization frequency of approximately 10 Hz, thus meeting the real-time requirements. This demonstrated the low spatial and temporal complexity and low operational cost of the localization system.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, Y.; Zhang, H.; Wang, F.-Y. Society-Centered and DAO-Powered Sustainability in Transportation 5.0: An Intelligent Vehicles Perspective. IEEE Trans. Intell. Veh. 2023, 8, 2635–2638. [Google Scholar] [CrossRef]
- Nielsen, K.; Hendeby, G. Multi-Hypothesis SLAM for Non-Static Environments with Reoccurring Landmarks. IEEE Trans. Intell. Veh. 2023, 8, 3191–3203. [Google Scholar] [CrossRef]
- Li, X. GNSS Repeater Based Differential Indoor Positioning with Multi-Epoch Measurements. IEEE Trans. Intell. Veh. 2023, 8, 803–813. [Google Scholar] [CrossRef]
- Dinh-Van, N.; Nashashibi, F.; Thanh-Huong, N.; Castelli, E. Indoor Intelligent Vehicle Localization Using WiFi Received Signal Strength Indicator. In Proceedings of the 2017 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Nagoya, Japan, 19–21 March 2017; pp. 33–36. [Google Scholar]
- Yu, K.; Wen, K.; Li, Y.; Zhang, S.; Zhang, K. A Novel NLOS Mitigation Algorithm for UWB Localization in Harsh Indoor Environments. IEEE Trans. Veh. Technol. 2019, 68, 686–699. [Google Scholar] [CrossRef]
- Zhu, X.; Qiu, T.; Atiquzzaman, M. BLS-Location: A Wireless Fingerprint Localization Algorithm Based on Broad Learning. IEEE Trans. Mob. Comput. 2023, 22, 115–128. [Google Scholar] [CrossRef]
- Shu, C.; Luo, Y. Multi-Modal Feature Constraint Based Tightly Coupled Monocular Visual-LiDAR Odometry and Mapping. IEEE Trans. Intell. Veh. 2023, 8, 3384–3393. [Google Scholar] [CrossRef]
- Xia, C.; Shen, Y.; Yang, Y.; Deng, X.; Chen, S.; Xin, J.; Zheng, N. Onboard Sensors-Based Self-Localization for Autonomous Vehicle with Hierarchical Map. IEEE Trans. Cybern. 2023, 53, 4218–4231. [Google Scholar] [CrossRef] [PubMed]
- Zhao, C.; Song, A.; Zhu, Y.; Jiang, S.; Liao, F.; Du, Y. Data-Driven Indoor Positioning Correction for Infrastructure-Enabled Autonomous Driving Systems: A Lifelong Framework. IEEE Trans. Intell. Transp. Syst. 2023, 24, 3908–3921. [Google Scholar] [CrossRef]
- Tang, Y.; Hu, Y.; Cui, J.; Liao, F.; Lao, M.; Lin, F.; Teo, R.S.H. Vision-Aided Multi-UAV Autonomous Flocking in GPS-Denied Environment. IEEE Trans. Ind. Electron. 2019, 66, 616–626. [Google Scholar] [CrossRef]
- Wu, F.; Duan, J.; Ai, P.; Chen, Z.; Yang, Z.; Zou, X. Rachis Detection and Three-Dimensional Localization of Cut off Point for Vision-Based Banana Robot. Comput. Electron. Agric. 2022, 198, 107079. [Google Scholar] [CrossRef]
- Shi, P.; Zhu, Z.; Sun, S.; Rong, Z.; Zhao, X.; Tan, M. Covariance Estimation for Pose Graph Optimization in Visual-Inertial Navigation Systems. IEEE Trans. Intell. Veh. 2023, 8, 3657–3667. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, J.; Huang, C.; Li, L. Learning Visual Semantic Map-Matching for Loosely Multi-Sensor Fusion Localization of Autonomous Vehicles. IEEE Trans. Intell. Veh. 2023, 8, 358–367. [Google Scholar] [CrossRef]
- Nister, D.; Naroditsky, O.; Bergen, J. Visual Odometry. In Proceedings of the Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, CVPR 2004, Washington, DC, USA, 27 June–2 July 2004. [Google Scholar]
- Li, M.; Mourikis, A.I. High-Precision, Consistent EKF-Based Visual-Inertial Odometry. Int. J. Robot. Res. 2013, 32, 690–711. [Google Scholar] [CrossRef]
- Yusefi, A.; Durdu, A.; Bozkaya, F.; Tığlıoğlu, Ş.; Yılmaz, A.; Sungur, C. A Generalizable D-VIO and Its Fusion with GNSS/IMU for Improved Autonomous Vehicle Localization. IEEE Trans. Intell. Veh. 2023, 9, 2893–2907. [Google Scholar] [CrossRef]
- Lategahn, H.; Stiller, C. Vision-Only Localization. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1246–1257. [Google Scholar] [CrossRef]
- Endres, F.; Hess, J.; Sturm, J.; Cremers, D.; Burgard, W. 3-D Mapping With an RGB-D Camera. IEEE Trans. Robot. 2014, 30, 177–187. [Google Scholar] [CrossRef]
- Chalvatzaras, A.; Pratikakis, I.; Amanatiadis, A.A. A Survey on Map-Based Localization Techniques for Autonomous Vehicles. IEEE Trans. Intell. Veh. 2023, 8, 1574–1596. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Tardós, J.D. ORB-SLAM2: An Open-Source SLAM System for Monocular, Stereo, and RGB-D Cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, M.; Meng, M.Q.-H. Improving RGB-D SLAM in Dynamic Environments: A Motion Removal Approach. Robot. Auton. Syst. 2017, 89, 110–122. [Google Scholar] [CrossRef]
- Labbé, M.; Michaud, F. RTAB-Map as an Open-Source Lidar and Visual Simultaneous Localization and Mapping Library for Large-Scale and Long-Term Online Operation. J. Field Robot. 2019, 36, 416–446. [Google Scholar] [CrossRef]
- Fuentes-Pacheco, J.; Ruiz-Ascencio, J.; Rendón-Mancha, J.M. Visual Simultaneous Localization and Mapping: A Survey. Artif. Intell. Rev. 2015, 43, 55–81. [Google Scholar] [CrossRef]
- Cho, H.; Kim, E.K.; Kim, S. Indoor SLAM Application Using Geometric and ICP Matching Methods Based on Line Features. Robot. Auton. Syst. 2018, 100, 206–224. [Google Scholar] [CrossRef]
- Ji, S.; Qin, Z.; Shan, J.; Lu, M. Panoramic SLAM from a Multiple Fisheye Camera Rig. ISPRS J. Photogramm. Remote Sens. 2020, 159, 169–183. [Google Scholar] [CrossRef]
- Cai, Y.; Lu, Z.; Wang, H.; Chen, L.; Li, Y. A Lightweight Feature Map Creation Method for Intelligent Vehicle Localization in Urban Road Environments. IEEE Trans. Instrum. Meas. 2022, 71, 8503115. [Google Scholar] [CrossRef]
- Lin, K.; Chen, M.; Deng, J.; Hassan, M.M.; Fortino, G. Enhanced Fingerprinting and Trajectory Prediction for IoT Localization in Smart Buildings. IEEE Trans. Autom. Sci. Eng. 2016, 13, 1294–1307. [Google Scholar] [CrossRef]
- Leordeanu, M.; Paraicu, I. Driven by Vision: Learning Navigation by Visual Localization and Trajectory Prediction. Sensors 2021, 21, 852. [Google Scholar] [CrossRef] [PubMed]
- Guo, C.; Lin, M.; Guo, H.; Liang, P.; Cheng, E. Coarse-to-Fine Semantic Localization with HD Map for Autonomous Driving in Structural Scenes. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 1146–1153. [Google Scholar]
- Li, J.; Jiang, F.; Yang, J.; Kong, B.; Gogate, M.; Dashtipour, K.; Hussain, A. Lane-DeepLab: Lane Semantic Segmentation in Automatic Driving Scenarios for High-Definition Maps. Neurocomputing 2021, 465, 15–25. [Google Scholar] [CrossRef]
- Wang, H.; Xue, C.; Zhou, Y.; Wen, F.; Zhang, H. Visual Semantic Localization Based on HD Map for Autonomous Vehicles in Urban Scenarios. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 11255–11261. [Google Scholar]
- Gallazzi, B.; Cudrano, P.; Frosi, M.; Mentasti, S.; Matteucci, M. Clothoidal Mapping of Road Line Markings for Autonomous Driving High-Definition Maps. In Proceedings of the 2022 IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, 4–9 June 2022; pp. 1631–1638. [Google Scholar]
- Wen, T.; Jiang, K.; Wijaya, B.; Li, H.; Yang, M.; Yang, D. TM3Loc: Tightly-Coupled Monocular Map Matching for High Precision Vehicle Localization. IEEE Trans. Intell. Transp. Syst. 2022, 23, 20268–20281. [Google Scholar] [CrossRef]
- Tao, Q.; Hu, Z.; Huang, G.; Cai, H.; Xianglong, W. LiDAR-Only Vehicle Localization Based on Map Generation. In Proceedings of the Transportation Research Board (TRB), 2019 Annual Meeting, Washington, DC, USA, 10 January 2020. [Google Scholar]
- Bansal, M.; Kumar, M.; Kumar, M. 2D Object Recognition: A Comparative Analysis of SIFT, SURF and ORB Feature Descriptors. Multimed. Tools Appl. 2021, 80, 18839–18857. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-Up Robust Features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An Efficient Alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Charmette, B.; Royer, E.; Chausse, F. Vision-Based Robot Localization Based on the Efficient Matching of Planar Features. Mach. Vis. Appl. 2016, 27, 415–436. [Google Scholar] [CrossRef]
- Li, J.; Hu, Q.; Ai, M. RIFT: Multi-Modal Image Matching Based on Radiation-Variation Insensitive Feature Transform. IEEE Trans. Image Process. 2020, 29, 3296–3310. [Google Scholar] [CrossRef] [PubMed]
- Bampis, L.; Gasteratos, A. Revisiting the Bag-of-Visual-Words Model: A Hierarchical Localization Architecture for Mobile Systems. Robot. Auton. Syst. 2019, 113, 104–119. [Google Scholar] [CrossRef]
- Gomez-Ojeda, R.; Moreno, F.-A.; Zuniga-Noel, D.; Scaramuzza, D.; Gonzalez-Jimenez, J. PL-SLAM: A Stereo SLAM System Through the Combination of Points and Line Segments. IEEE Trans. Robot. 2019, 35, 734–746. [Google Scholar] [CrossRef]
- Yin, P.; Srivatsan, R.A.; Chen, Y.; Li, X.; Zhang, H.; Xu, L.; Li, L.; Jia, Z.; Ji, J.; He, Y. MRS-VPR: A Multi-Resolution Sampling Based Global Visual Place Recognition Method. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 7137–7142. [Google Scholar]
- Maddern, W.; Milford, M.; Wyeth, G. CAT-SLAM: Probabilistic Localisation and Mapping Using a Continuous Appearance-Based Trajectory. Int. J. Robot. Res. 2012, 31, 429–451. [Google Scholar] [CrossRef]
- Zhang, C.; Du, B. Image-Based Approach for Parking-Spot Detection with Occlusion Handling. J. Transp. Eng. Part A Syst. 2020, 146, 04020098. [Google Scholar] [CrossRef]
- Huang, Y.; Zhao, J.; He, X.; Zhang, S.; Feng, T. Vision-Based Semantic Mapping and Localization for Autonomous Indoor Parking. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 636–641. [Google Scholar]
- Li, J.; Lou, J.; Li, Y.; Pan, S.; Xu, Y. Trajectory Tracking of Autonomous Vehicle Using Clothoid Curve. Appl. Sci. 2023, 13, 2733. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, R.; Jian, Z.; Zhan, W.; Zheng, N.; Tomizuka, M. Clothoid-Based Reference Path Reconstruction for HD Map Generation. Trans. Intell. Transport. Sys. 2023, 25, 587–601. [Google Scholar] [CrossRef]
- Lin, P.; Javanmardi, E.; Tsukada, M. Clothoid Curve-Based Emergency-Stopping Path Planning with Adaptive Potential Field for Autonomous Vehicles. IEEE Trans. Veh. Technol. 2024, 1–16. [Google Scholar] [CrossRef]
- Liu, G.; Hu, Z. Fast Loop Closure Detection Based on Holistic Features from SURF and ORB. Robot 2017, 39, 36–45. [Google Scholar] [CrossRef]
- Kimia, B.B.; Frankel, I.; Popescu, A.-M. Euler Spiral for Shape Completion. Int. J. Comput. Vis. 2003, 54, 159–182. [Google Scholar] [CrossRef]
- Abramowitz, M.; Stegun, I.A.; Miller, D. Handbook of Mathematical Functions with Formulas, Graphs and Mathematical Tables (National Bureau of Standards Applied Mathematics Series No. 55). J. Appl. Mech. 1965, 32, 239. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Marquardt, D.W. An Algorithm for Least-Squares Estimation of Nonlinear Parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Cummins, M.; Newman, P. FAB-MAP: Probabilistic Localization and Mapping in the Space of Appearance. Int. J. Robot. Res. 2008, 27, 647–665. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classical Localization in Unknown Environments | Localization Process | Classification of Methods | Disadvantages |
|---|---|---|---|
| Visual localization method | Visual map construction | HD map [29,30,31,32,33] | Large data volume, high storage requirements, and low matching efficiency |
| Lightweight map [26] | Less features, reduced accuracy | ||
| Map-based localization | Sparse feature-based matching methods [13,34,35,36,37,38,39,40] | Insufficient matching accuracy | |
| Multi-level matching method [31,41,42] | Mismatching of feature points in repeated textures | ||
| “Coarse-to-fine” matching strategy [43] | High dependence on node density | ||
| Localization method considering trajectory prediction [27,28,44] | High dependence on node density | ||
| Visual localization in underground parking lots | Panoramic monitoring for identifying idle parking spaces [45] | Unable to obtain precise pose of parking spaces and vehicle | |
| Berth codes matching method [46] | Mismatching caused by encoding occlusion | ||
| Scene | Method | Memory Requirements (MB) | |
|---|---|---|---|
| Strong Light | Weak Light | ||
| Industrial park | Ours | 4.4 | 2.2 |
| Tao’s | 17.7 | 8.1 | |
| Mall | Ours | 22.3 | 9.6 |
| Tao’s | 114.1 | 51.0 | |
| Scene | Loop Number | Average Error (m) | Max Error (m) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Group 1 | Group 2 | Group 3 | Group 4 | Group 1 | Group 2 | Group 3 | Group 4 | ||
| Industrial park | 2nd | 0.31 | 0.34 | 0.44 | 0.37 | 1.67 | 2.14 | 2.85 | 2.38 |
| 3rd | 0.38 | 0.40 | 0.51 | 0.43 | 1.21 | 1.89 | 1.85 | 1.91 | |
| Mall | 2nd | 0.39 | 0.41 | 0.41 | 0.40 | 1.98 | 2.08 | 1.99 | 1.80 |
| 3rd | 0.42 | 0.42 | 0.47 | 0.45 | 1.64 | 1.62 | 2.23 | 1.60 | |
| K’s Value | Industrial Park | Mall | |||
|---|---|---|---|---|---|
| 2nd Loop | 3rd Loop | 2nd Loop | 3rd Loop | ||
| Accuracy (%) | K = 2 | 93.01 | 92.33 | 87.53 | 85.46 |
| K = 3 | 93.85 | 93.03 | 90.78 | 89.69 | |
| K = 4 | 95.25 | 94.08 | 93.49 | 91.86 | |
| K = 5 | 95.81 | 94.77 | 95.36 | 93.67 | |
| K = 6 | 96.37 | 93.73 | 94.11 | 92.16 | |
| K = 7 | 95.81 | 93.03 | 93.00 | 91.13 | |
| K = 8 | 94.97 | 92.33 | 92.33 | 90.59 | |
| Average error (frames) | K = 2 | 0.081 | 0.098 | 0.173 | 0.188 |
| K = 3 | 0.078 | 0.087 | 0.120 | 0.128 | |
| K = 4 | 0.053 | 0.066 | 0.080 | 0.093 | |
| K = 5 | 0.045 | 0.059 | 0.053 | 0.071 | |
| K = 6 | 0.039 | 0.073 | 0.073 | 0.090 | |
| K = 7 | 0.047 | 0.080 | 0.089 | 0.106 | |
| K = 8 | 0.059 | 0.087 | 0.111 | 0.113 | |
| Scene | Loop Number | Method | Accuracy (%) | Average Error (Frames) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Group 1 | Group 2 | Group 3 | Group 4 | Group 1 | Group 2 | Group 3 | Group 4 | |||
| Industrial park | 2nd | Ours | 95.81 | 95.81 | 95.53 | 96.09 | 0.045 | 0.047 | 0.050 | 0.047 |
| Tao’s | 77.37 | 75.14 | 60.34 | 70.11 | 0.246 | 0.285 | 0.860 | 0.419 | ||
| 3rd | Ours | 94.77 | 93.03 | 94.43 | 93.38 | 0.059 | 0.080 | 0.070 | 0.080 | |
| Tao’s | 63.76 | 60.98 | 41.81 | 56.10 | 0.415 | 0.498 | 1.268 | 0.662 | ||
| Mall | 2nd | Ours | 95.36 | 95.50 | 95.63 | 95.43 | 0.053 | 0.052 | 0.053 | 0.059 |
| Tao’s | 49.62 | 49.62 | 48.65 | 48.58 | 1.030 | 1.063 | 1.046 | 1.086 | ||
| 3rd | Ours | 93.67 | 92.88 | 92.70 | 92.52 | 0.071 | 0.081 | 0.083 | 0.084 | |
| Tao’s | 44.99 | 45.66 | 42.34 | 44.15 | 1.184 | 1.198 | 1.235 | 1.238 | ||
| Scene | Loop | Method | Average Error (m) | Percentage of Nodes with Error < 0.6 m (%) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Group 1 | Group 2 | Group 3 | Group 4 | Group 1 | Group 2 | Group 3 | Group 4 | |||
| Industrial park | 2nd | Ours | 0.262 | 0.281 | 0.364 | 0.300 | 99.16 | 98.32 | 90.50 | 94.69 |
| Tao’s | 0.329 | 0.362 | 0.803 | 0.503 | 82.40 | 81.28 | 60.89 | 75.70 | ||
| PAN-SLAM | 0.313 | 0.416 | 0.313 | 0.416 | 89.66 | 73.18 | 89.66 | 73.18 | ||
| 3rd | Ours | 0.339 | 0.352 | 0.429 | 0.372 | 97.56 | 95.47 | 85.71 | 94.43 | |
| Tao’s | 0.542 | 0.579 | 1.158 | 0.725 | 64.11 | 62.37 | 40.77 | 59.23 | ||
| PAN-SLAM | 0.404 | 0.492 | 0.404 | 0.492 | 74.22 | 62.72 | 74.22 | 62.72 | ||
| Mall | 2nd | Ours | 0.355 | 0.362 | 0.362 | 0.357 | 91.27 | 90.85 | 90.51 | 91.55 |
| Tao’s | 1.155 | 1.179 | 1.193 | 1.171 | 16.22 | 14.48 | 15.32 | 14.83 | ||
| PAN-SLAM | 0.587 | 0.731 | 0.587 | 0.731 | 53.43 | 43.24 | 53.43 | 43.24 | ||
| 3rd | Ours | 0.373 | 0.372 | 0.408 | 0.396 | 88.96 | 89.02 | 83.84 | 85.52 | |
| Tao’s | 1.267 | 1.267 | 1.432 | 1.354 | 11.84 | 10.98 | 9.83 | 10.01 | ||
| PAN-SLAM | 0.661 | 0.754 | 0.661 | 0.754 | 49.19 | 41.80 | 49.19 | 41.80 | ||
| Scene | Loop | Method | Average Time Consumption (ms) | |||
|---|---|---|---|---|---|---|
| Group 1 | Group 2 | Group 3 | Group 4 | |||
| Industrial park | 2nd | Ours | 132 | 114 | 145 | 119 |
| Tao’s | 1765 | 1540 | 1947 | 1490 | ||
| PAN-SLAM | 116 | 101 | 116 | 101 | ||
| 3rd | Ours | 144 | 102 | 155 | 107 | |
| Tao’s | 1798 | 1510 | 1993 | 1469 | ||
| PAN-SLAM | 121 | 98 | 121 | 98 | ||
| Mall | 2nd | Ours | 131 | 125 | 149 | 122 |
| Tao’s | 1906 | 1731 | 1945 | 1763 | ||
| PAN-SLAM | 118 | 105 | 118 | 105 | ||
| 3rd | Ours | 161 | 146 | 165 | 149 | |
| Tao’s | 1947 | 1861 | 1965 | 1883 | ||
| PAN-SLAM | 125 | 113 | 125 | 113 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Chen, J.; Yuan, Y.; Hu, Z.; Liu, X. Enhanced Berth Mapping and Clothoid Trajectory Prediction Aided Intelligent Underground Localization. Appl. Sci. 2024, 14, 5032. https://doi.org/10.3390/app14125032
Li F, Chen J, Yuan Y, Hu Z, Liu X. Enhanced Berth Mapping and Clothoid Trajectory Prediction Aided Intelligent Underground Localization. Applied Sciences. 2024; 14(12):5032. https://doi.org/10.3390/app14125032
Chicago/Turabian StyleLi, Fei, Jialiang Chen, Yuelin Yuan, Zhaozheng Hu, and Xiaohui Liu. 2024. "Enhanced Berth Mapping and Clothoid Trajectory Prediction Aided Intelligent Underground Localization" Applied Sciences 14, no. 12: 5032. https://doi.org/10.3390/app14125032
APA StyleLi, F., Chen, J., Yuan, Y., Hu, Z., & Liu, X. (2024). Enhanced Berth Mapping and Clothoid Trajectory Prediction Aided Intelligent Underground Localization. Applied Sciences, 14(12), 5032. https://doi.org/10.3390/app14125032