1. Introduction
As crucial equipment for earthquake rescue operations, a comprehensive set of multi-dimensional and multi-level performance indexes for earthquake search and rescue robots can effectively serve as the key evaluation criteria to reflect the efficiency and quality of rescue operations [
1]. Consequently, evaluating the performance of earthquake search and rescue robots in terms of both quantitative and qualitative measures proves to be a challenging task due to the diversity and complexity of performance indexes.
Numerous theories have been proposed to evaluate the performance of rescue robots. Li, Yutan, et al. [
2] have evaluated the walking performance of coal mine rescue robots in terms of various performance indexes, including the maximum trench width, maximum obstacle height, maximum climbing angle, and stair climbing capability. Zhang, Di et al. [
3] have assessed the locomotion capabilities of an earthquake search and rescue robot in terms of its performance in flat terrain traversal, climbing steps, rotational movement, ascending slopes, and aerial maneuverability. Zhao, Jing, et al. [
4] have evaluated the efficiency of quadruped rescue robots based on their capabilities in survival, locomotion, operation, and environmental interaction. Baek, Jun, et al. [
5] have conducted an analysis of the impact factors of mobile rescue robots for human body detection, encompassing communication time and life body identification. However, solely relying on these performance indexes is insufficient for evaluating the performance of earthquake search and rescue robots. Additionally, there is limited literature available on exploring the hierarchical structure of performance evaluation indexes specifically designed for rescue robots. Therefore, further research is required to develop an evaluation approach for rescue robots.
The selection of an appropriate evaluation method for performance indexes is beneficial for analysts and evaluators in efficiently evaluating alternatives and determining the optimal alternative [
6]. When selecting multiple earthquake rescue robots, it is essential to consider the conflicting performance indexes. For instance, during the evaluation of various indexes, certain robots may opt to enhance the mass-volume ratio in order to improve the motion stability of the rescue robot. However, this increase in ratio might have a detrimental impact on obstacle clearance performance when confronted with narrow or low-height rescue environments. Therefore, it is necessary to address this issue by employing a multi-criteria decision-making (MCDM) approach that incorporates various factors [
7]. The process of multi-criteria decision-making consists of several stages, including (1) defining objectives, (2) selecting the criteria for measuring those objectives, (3) identifying alternatives, (4) assigning weights to the selected criteria, (5) utilizing a suitable mathematical algorithm to rank the alternatives [
8].
Numerous methods have been suggested in existing literature and employed to tackle various MCDM issues [
9]. The technique for order preference by similarity to ideal solution (TOPSIS) is a multi-attribute decision-making method based on distance measurement, which calculates the distance between each attribute and the ideal solution, as well as the distance between each attribute and the anti-ideal solution. The relative preference of each attribute is determined by calculating the weighted sum of these two distances, and the optimal alternative can be determined [
10]. However, when the information in the environment is incomplete or inaccurate, TOPSIS technology may not fully consider these uncertain factors, resulting in inaccurate decision results. Cluster analysis, a robust method widely employed in MCDM, efficiently uncovers the underlying rules and structures within datasets. By grouping similar alternatives into classes, cluster analysis reduces data dimensionality and facilitates comprehension and processing. Unlike supervised learning techniques, cluster analysis is an unsupervised learning approach primarily aimed at identifying natural clusters or groups when dataset labels are ambiguous or challenging to determine. However, it can only categorize alternatives as either similar or dissimilar without providing information on their relative superiority or importance. Artificial neural networks (ANN) have gained traction in MCDM for addressing complex problems and approximating multi-attribute utility functions by learning the mapping relationship between input and output, but their successful integration requires substantial data support to optimize performance. The analytic hierarchy process (AHP) is extensively utilized in the field of multi-criteria decision-making and has demonstrated its effectiveness in addressing performance decision-making issues of rescue robots [
11]. Yutan Li et al. [
2] have utilized AHP to evaluate the walking performance of walking mechanism in coal mine rescue robots. Wang, Shipeng et al. [
12] have employed AHP to evaluate the technical indexes, performance indexes, and structural indexes for scheme selection during the design and manufacturing process of new water-wading rescue robots. The primary advantages of AHP lie in its ability to simultaneously handle multiple criteria, analyze complex problems hierarchically, and provide a clear and comprehensible model structure. Moreover, the AHP method effectively integrates qualitative and quantitative data, enabling decision-makers to consider both types of information when making decisions and facilitating more comprehensive and accurate evaluations. However, it is important to note that the process of factor comparison often entails inherent uncertainty and subjectivity, as experts may encounter difficulties in establishing a precise scale for comparing two factors. Under such circumstances, employing the classical AHP method may yield decision results that lack accuracy. As an effective approach for handling incomplete or fuzzy information, the fuzzy analytic hierarchy process (FAHP) offers a more comprehensive and scientifically grounded basis for decision-making in the presence of incomplete information and complex causal relationships among variables. The fundamental concept behind FAHP lies in its consideration of interdependencies between indexes, enabling a clearer understanding of how changes in one index impact others. Consequently, FAHP method has gained widespread application across various domains. For instance, in control engineering, it can optimize control system design; within artificial intelligence [
13], it addresses fuzzy logic problems; management science benefits from its ability to tackle complex decision-making challenges [
14]; and multi-criteria decision-making relies on FAHP as an indispensable tool.
However, the aforementioned evaluation methods lack a visual mode, which hinders the clear interpretation of the evaluation results. This not only obscures the significance of each index but also complicates the ranking of rescue robots based on their performance. The radar chart method takes into account both the overall strength and coordinated development across various aspects, thereby providing a more comprehensive reflection of an evaluated object’s advantages [
15]. The most notable feature of radar charts lies in their capacity to visually represent the status of a rescue robot and accurately rank similarly performing rescue robots, thereby facilitating a more comprehensive understanding of their performance [
16,
17]. However, the weight of each index is fixed and cannot be adjusted according to the actual circumstances in the conventional radar chart. This limitation may result in an underestimation of the pivotal role played by certain indexes during the evaluation process, as well as an overestimation of the significance of other indexes. In conventional radar charts, index values solely impact the shape without influencing evaluation results [
18]. Nevertheless, in practical evaluations, index values often become a focal point of attention. Therefore, this paper proposes an improved radar chart that incorporates both index weights and values into its design to ensure more accurate and comprehensive evaluation results.
This paper proposed an improved fuzzy analytic hierarchy process (IFAHP) based on an improved radar chart to evaluate and rank the performance of earthquake search and rescue robots, ultimately facilitating the selection of the search and rescue robot with superior overall performance. Firstly, a comprehensive set of evaluation indexes for search and rescue robots is constructed to address the limitations associated with using a single evaluation index. Subsequently, three types of alternatives for earthquake search and rescue robots are evaluated using performance tests to obtain a comprehensive evaluation set for the corresponding criteria. Additionally, the criterion layer and the weight of each evaluation index are determined using hierarchical analysis and a trapezoidal fuzzy number complementary judgment matrix, and a new consistency test method is proposed, aiming to mitigate the influence of subjective factors on expert decision-making results. Subsequently, the performance indexes of earthquake search and rescue robots are analyzed, followed by a comparative assessment of the overall performance among different types of such robots using an improved radar chart. Finally, the accuracy and effectiveness of the proposed method on three types of earthquake search and rescue robots are verified in practical examples.
The remaining sections of this paper are organized as follows: the related evaluation criteria and hierarchical structure model are shown in
Section 2. The content and process of the performance test are described in
Section 3. Then, the introduction to the improved fuzzy analytic hierarchy process is given in
Section 4. A comprehensive and visual evaluation method for ranking and selection for the performance of earthquake search and rescue robots is presented in
Section 5. Finally, the proposed method is illustrated with a case study of the three types of earthquake search and rescue robots in
Section 6. A sensitivity analysis of the results is presented in
Section 7. The main conclusions, limitations, and future works are summarized in
Section 8 and
Section 9.
2. Evaluation Criteria
The fundamental performance requirements of rescue robots encompass robust survivability to ensure seamless access to rescue sites, versatile mobility for diverse mission execution, precise detection and perception capabilities to enhance rescue efficiency, and rapid communication abilities for enhanced human–robot collaboration and further improved rescue efficiency [
19,
20]. In the process of conducting a comprehensive literature review on the related concepts of performance evaluation for rescue robots, a series of targeted and practical evaluation criteria from multiple perspectives have been proposed. To enhance the depth and professionalism of our criteria research, we collaborated with an experienced team of experts who possess rich practical experience and excellent theoretical knowledge in the field of rescue robots. These experts have profound expertise in mechanical engineering, automation control, information and communication engineering, as well as disaster prevention and mitigation engineering. Their professional knowledge and unique perspectives provide robust support for our research endeavors. Via extensive collaboration with them, thorough discussions regarding the performance evaluation criteria for rescue robots have been thoroughly discussed.
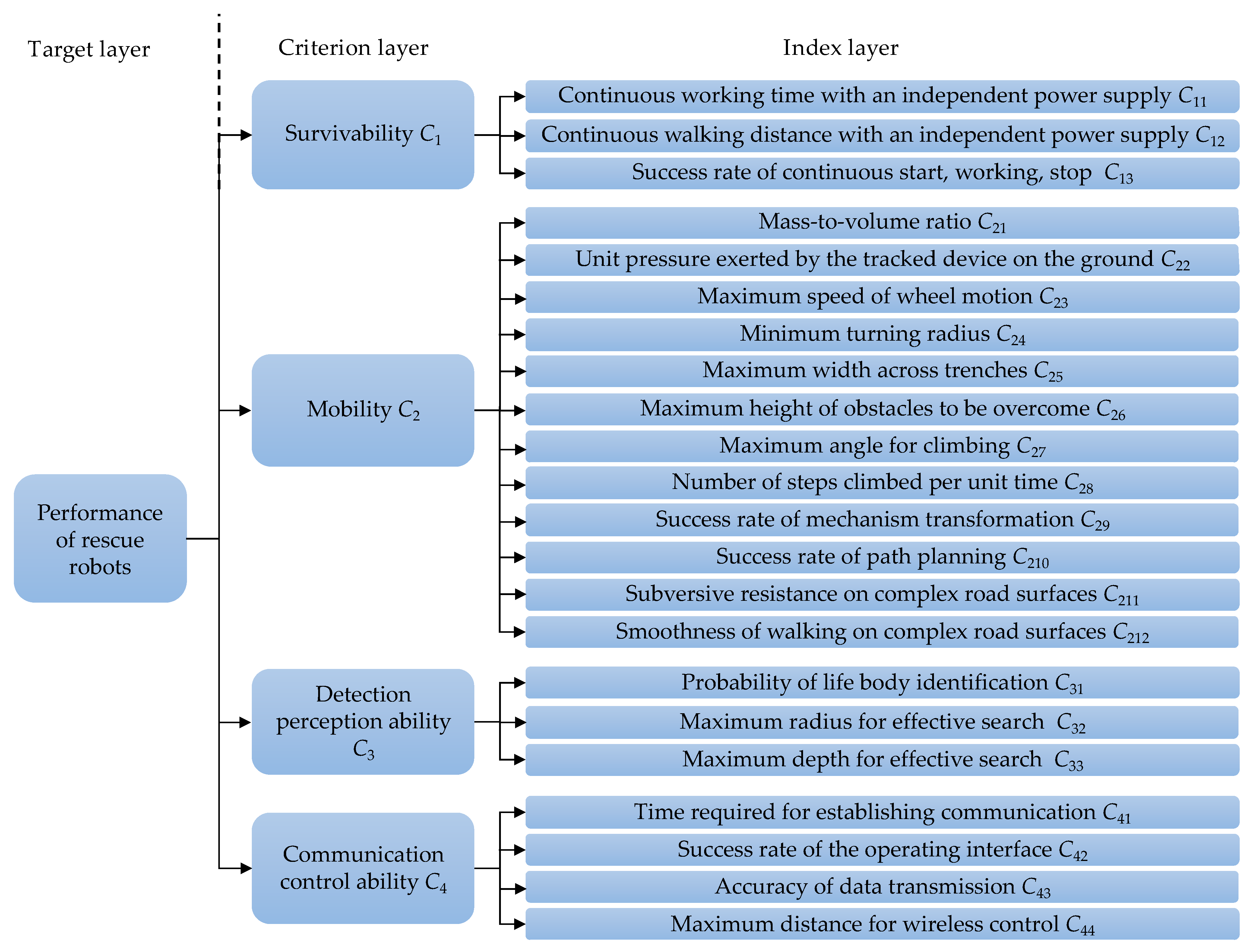
The evaluation of rescue robots’ performance is a comprehensive problem involving multiple factors and levels. The evaluation criteria in this paper are classified into two levels, namely main criteria, and sub-criteria, to facilitate calculation and analysis. The critical factors for assisting rescuers in efficiently searching for survivors at disaster scenes and enhancing rescue efficiency include robust survivability, versatile mobility, precise detection perception capabilities, and rapid communication abilities. Consequently, the main criteria for evaluating rescue robots encompass survivability, mobility, detection perception ability, and communication control ability. The following segment provides concise explanations regarding the interpretations, industry norms, and factors that influence the sub-criteria.
2.1. Survivability
The survivability of rescue robots primarily reflects their reliability, while ensuring an adequate power supply is crucial to sustain uninterrupted rescue operations. The power supply unit is often identified as a limiting factor in the performance of rescue robots, as frequently reported in numerous literature studies [
21,
22]. The resilience of rescue robots is directly proportional to the operational duration and walking distance when supplied with energy by the power unit [
23,
24]. Additionally, their continuous ability to initiate and cease operations ensures sustained execution of rescue missions [
25]. Therefore, the survivability evaluation criteria are presented in
Table 1, providing comprehensive details for analysis.
2.2. Mobility
The mobility of rescue robots is paramount for effective disaster relief efforts. Only with robust mobility can they adeptly navigate the complex disaster environment, expeditiously and efficiently execute rescue tasks, and provide timely assistance to trapped personnel. When designing a robot for rescue missions, it is crucial to consider its ability to operate in confined spaces, such as collapsed buildings, caves, or rugged terrains. Factors like debris, uneven terrain, and narrow passageways impose limitations on the physical design of the rescue robot; hence, it must be compact. Consequently, optimizing the size and mass of the rescue robot becomes essential for maneuvering through narrow spaces and overcoming obstacles [
28]. To ensure effective operation in these environments, designers need to meticulously evaluate the positioning of the rescue robot’s center of gravity [
29]. Specifically, when crossing obstacles, maintaining a low center of gravity is imperative to ensure optimal traction capability [
30,
31]. This precautionary measure prevents tipping over or loss of balance that could hinder task completion. Therefore, designers must thoughtfully consider both structure and weight distribution to achieve an appropriate center of gravity position. In addition to the aforementioned factors, the continuous advancement and widespread use of re-configurable modular rescue robots have made the mechanical transformation success rate a crucial factor affecting the mobility of such robots. This is because their ability to smoothly adapt and transform into different forms in complex environments directly impacts their task completion success [
32,
33]. Meanwhile, the rescue robot deployed in disaster sites must possess exceptional climbing, obstacle-crossing, running, and turning capabilities to effectively adapt to diverse terrain environments [
34,
35]. Moreover, it is imperative for the rescue robot to demonstrate flexible control proficiency and robust load-bearing capacity in order to efficiently transport rescue equipment and materials, promptly reach locations where individuals are trapped, and execute rescue operations [
36,
37]. Therefore, the mobility evaluation criteria are presented in
Table 2, providing comprehensive details for analysis.
2.3. Perception Detection Ability
The significance of rescue robots in rescue operations is self-evident, primarily due to their advanced environmental perception and detection capabilities, as well as their exceptional capacity to efficiently locate and identify victims. In hazardous, unpredictable, and intricate rescue environments, the prompt and accurate identification and localization of victims under harsh conditions while covering extensive search areas within limited timeframes are pivotal factors for evaluating the detection and perception abilities of rescue robots [
55,
56,
57]. Therefore, the detection perception evaluation criteria are presented in
Table 3, providing comprehensive details for analysis.
2.4. Communication Control Ability
The communication control ability of rescue robots plays a crucial role in the successful execution of their missions. This ability primarily involves real-time communication between the operator and the rescue robot [
60], ensuring precise control by the operator and effective information collection and transmission by the rescue robot to better assist rescue personnel in accomplishing tasks. Key elements of the communication control ability encompass command accuracy and comprehensive signal processing [
61]. Therefore, the communication control evaluation criteria are presented in
Table 4, providing comprehensive details for analysis.
The corresponding hierarchical structure of these criteria is established based on the above comprehensive analysis and quantification of the evaluation criteria for rescue robots, as illustrated in
Figure 1. The hierarchical structure allows for a clear evaluation of the rescue robot’s performance on each individual criterion and how these criteria impact the overall performance of rescue robots.
3. Performance Test
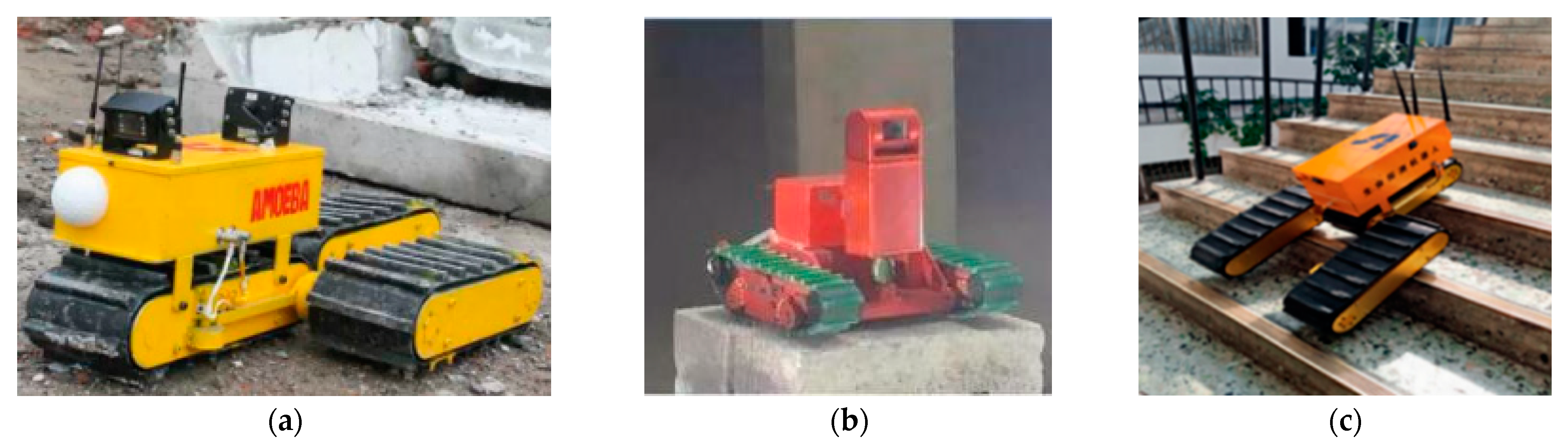
At present, a wide range of rescue robots are available in the market, each with distinct characteristics and functionalities. To comprehensively understand and evaluate their performance, it is essential to have diverse samples for testing and research purposes. Therefore, this paper selects three types of earthquake search and rescue robots developed by the Shenyang Institute of Automation as the subjects of investigation. These three robots are denoted as Sample A, Sample B, and Sample C with their prototypes depicted in
Figure 2.
Each robot exhibits unique design concepts, functional configurations, and practical applications. The related parameters of the three robots are shown in
Table 5. Subsequently, a detailed analysis and comparison of these three robots will be conducted.
Sample A: The robot is designed for exploring ruins and features three independently driven tracks. The position of these tracks can be adjusted to suit various rescue environments and tasks, allowing the robot to transform into linear, triangular, or side-by-side configurations. Meanwhile, the robot can penetrate into the ruins and utilize its own infrared camera and sound sensor to transmit real-time image and voice information from inside the ruins back to the console, enabling rescuers to promptly identify survivors’ locations and assess their surrounding environment.
Sample B: According to the terrain characteristics in rescue environments, the robot’s track geometry can be adjusted to enable it to switch between wheeled and tracked motion modes. Meanwhile, the robot is capable of entering hazardous situations and conducting survivor search and environmental detection tasks using its own camera, temperature, and humidity sensor, as well as a toxic and harmful gas sampling device. Additionally, the cloud platform can be deployed vertically alongside the robot into elevator shafts and caves to enhance the rescuer’s visibility range.
Sample C: The mobile mechanism adopts a modular chain structure to ensure its capability to navigate complex terrains. Depending on different rescue environments and tasks, the robot can transform into three distinct configurations: triangular, D-shaped, and side-by-side. Meanwhile, the robot integrates life detection technology with life detection radar, video, and audio information. Additionally, it is capable of penetrating non-metallic materials to effectively detect the vital signs of survivors using this life detection technology.
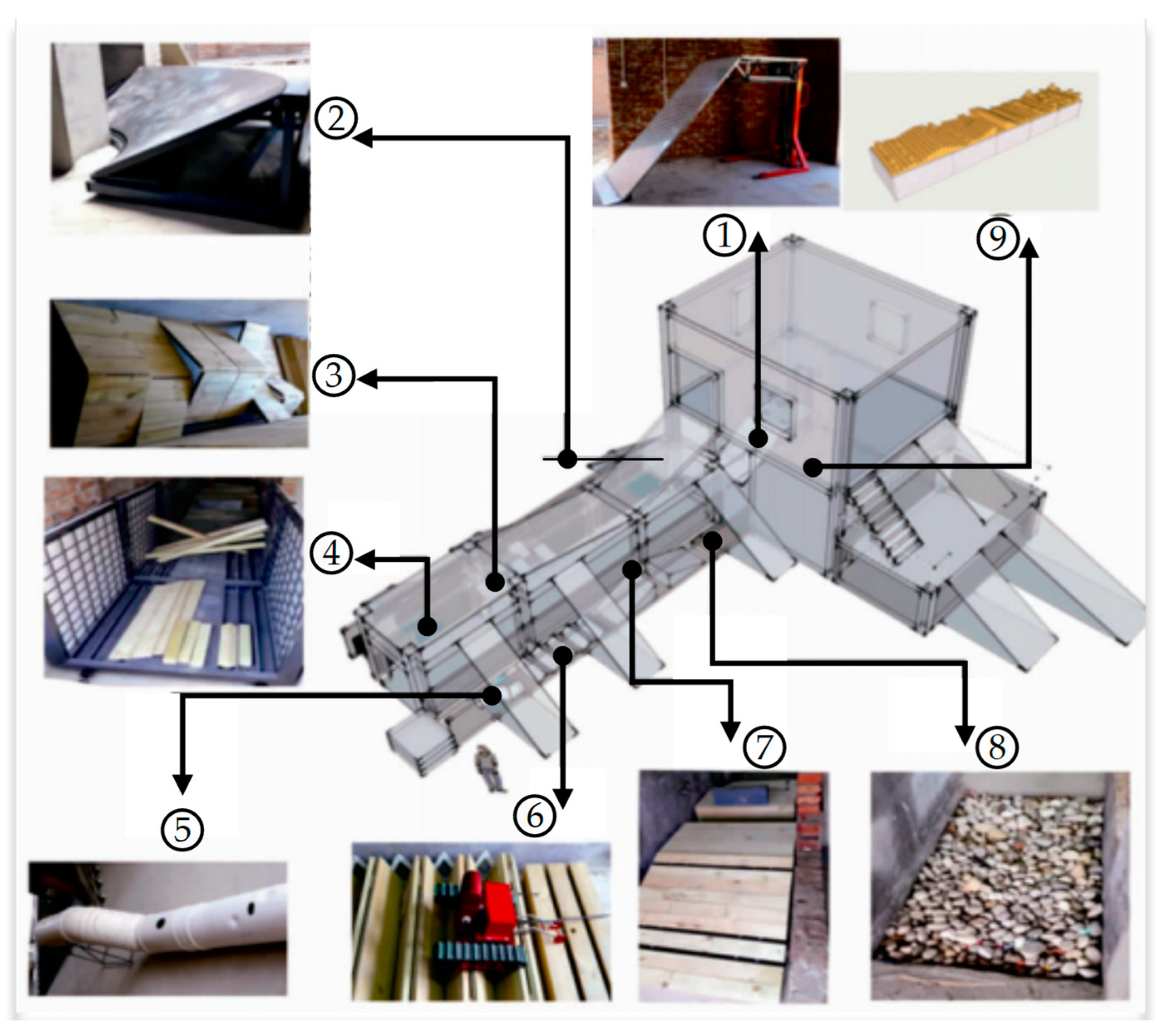
The performance test of the three types of earthquake rescue robots is conducted to obtain the evaluation criteria’s values. In this paper, a series of test modules designed by the national earthquake response support service are used to test the performance of the three types of earthquake rescue robots [
64]. The real arrangement of each module is shown in
Figure 3. The next section will present the specific content of each module.
The dynamic slope test module is a linkage mechanism consisting of a hydraulic lifting platform and a slope device featuring an adjustable continuous slope ranging from 15° to 16°. Additionally, the module allows for variation in the slope material to assess the climbing ability under different friction conditions.
The adjustable cross-cone turning module is designed with a 90° turning angle, allowing for an adjustable cone slope and automatic twisting of the guide frame on both sides to adapt to the cone. The flexibility of turning and lateral balance ability at different speeds can be tested.
The adjustable ridge side slope module consists of multiple plates joined together by twisted plates. The slope can be adjusted, and the complexity of the side slope can be modified by altering the direction in which the plates are joined, allowing for testing of both passing ability and balance capability.
The complex pavement interspersed construction module consists of a grid and multiple wooden piles. By adjusting the interspersed positions of wooden piles, it is possible to simulate intricate terrains and assess flexibility and passing capacity.
The test module of the pipeline consists of torsional splicing techniques. Rotating the entire pipeline simulates complex pipelines and tests their ability to pass through narrow spaces by adjusting the vertical position.
The adjustable wave pavement module is constructed by combining multiple plate strands to form a collapsible fan shape. The handle allows for modification of the wave spacing, while one end of the simulated staircase can be elevated to assess the performance on uneven road surfaces and steps.
The adjustable slope-crossing module consists of two sets of independent slopes connected face to face, and the spacing can be adjusted according to the need to test the ability to cross the gully.
The test module consists of multiple depressions that can be filled with various materials (such as sand and stone columns) to simulate different road conditions.
The re-configurable terrain test module consists of a vertical arrangement of hundreds of wooden cubes, forming a rectangular, square matrix. Each individual cube is equipped with an independent lifting and locking device, enabling adjustable height settings. This design allows for the simulation of various complex terrain structures and facilitates the testing of irregular pavement traversal capabilities.
The test environment is equipped with real-time monitoring functions. It includes a total of 11 monitoring cameras, a temperature and humidity sensor, six fixed installation wireless nodes, and six randomly scattered wireless nodes. By utilizing the multi-source wireless environment sensing network, remote monitoring of the testing process and environmental information are achieved, as depicted in
Figure 4.
In this paper, the test standard for each criterion shown in
Figure 2 is based on the General specifications of ground robots for search and rescue in ruins (GB/T 37703-2019) [
65]. The index test methods are derived from the existing methods [
66] used at the national earthquake emergency rescue training base. The performance indexes test results are presented in
Table 6. All tests for performance indexes were conducted three times, and the average value was considered as the test result. Additionally, a list of test methods for some important indexes is provided as follows:
Testing the values of continuous working time with an independent power supply. When the battery is fully charged, turn on the power switch and operate the robot at low speed (one-third of its maximum speed of wheeled motion) until the robot automatically shuts down due to low power. When the robot starts moving, the stopwatch starts, and when the robot stops moving, the stopwatch stops. The recorded time can be taken as the value of continuous working time with an independent power supply.
Testing the values of maximum obstacle height. The initial height of the vertical obstacle is set to be 10 cm, with a width of 5 cm. The measurement is conducted three times. If at least one of the three measurements passes, then the height is increased by 2 cm; if none passes, then the height is reduced by 2 cm. This process is repeated for three measurements. The loop continues until it reaches a point where further increase or reduction is not possible anymore, and the maximum value of height is recorded as the value of maximum obstacle height.
Testing the values of walking smoothness on complex road surfaces. The complex bumpy rubble road surface with a length of 50 m is set up. An acceleration sensor is installed on the robot body device in the vertical direction. The robot travels at a uniform speed at 50% of its maximum wheel motion speed. After the movement, the acceleration curves in the vertical direction are output, and the average value of the peak of the curve is represented as az is calculated. The value of az can be taken as the value of walking smoothness on complex road surfaces.
Testing the values of life body identification probability. The organisms are placed at the 70% maximum effective search radius and the 70% maximum effective search depth. Each experiment is conducted five times, and the probability of successful perception can be calculated as the value of life body identification probability.
Testing the values of maximum wireless control distance. The initial value of the wireless control distance is set to 10 m. The measurement is conducted three times. If the robot can be successfully controlled at least once out of the three measurements, then the distance is increased by 1 m; if unsuccessful, it is reduced by 1 m. This measurement process is repeated three times. The loop continues until no further increase or reduction is possible, and the maximum value of distance can be recorded as the value of maximum wireless control distance.
4. Improved Fuzzy Analytic Hierarchy Process (IFAHP)
The AHP method integrates qualitative analysis and quantitative calculation to achieve multi-objective decision-making. It is characterized by its simple structure and strong systematic approach, making it suitable for establishing a hierarchical analysis model to evaluate the performance of earthquake rescue robots. By decomposing the complex problem into objectives, criteria, and indexes at multiple levels and angles, the rationality and systematicness of ranking earthquake rescue robots are ensured. Simultaneously, fuzzy theory is employed to fuzzify the process of weight calculation in order to reduce the influence of subjective factors in expert evaluation. Moreover, an improved fuzzy analytic hierarchy process is utilized for determining the weight calculation of earthquake search and rescue robots, and the conversion between qualitative analysis and quantitative computation is illustrated in
Table 7.
It can be seen from
Table 7 that the trapezoidal fuzzy complementary judgment matrix can be used to replace the judgment matrix of AHP, and the weight calculation can be fuzzified so as to improve the limitations of subjective decision-making of AHP and ensure the objectivity and rationality of the weight calculation of performance indexes of earthquake rescue robots.
Assuming that the performance evaluation of the earthquake search and rescue robots consists of n (n > 2) performance evaluation indexes , denoted as set with . The trapezoidal fuzzy number complementary judgment matrix is derived, where represents the relative importance of the index compared to , with and satisfying , .
4.1. Establishment of Hierarchical Model
As shown in
Figure 1, the hierarchical model of performance evaluation indexes for earthquake search and rescue robots takes the comprehensive performance of earthquake rescue robots as the target layer, while the criteria layer comprises four key aspects: survivability, mobility, detection, and perception ability, and communication and control ability. Each criterion contains multiple specific indexes.
4.2. Improved Method of Consistency Test
Assuming the participation of
K experts in the evaluation, the complementary judgment matrix for each expert can be established as
based on
Table 7, where
represents a trapezoidal fuzzy number,
.
The kernel and kernel operator are introduced to compute the kernel matrix of the complementary judgment matrix for trapezoidal fuzzy numbers, aiming to test the consistency [
67]. The kernel of trapezoidal fuzzy numbers
is defined as follows.
The kernel matrix of can be obtained as .
The process of consistency testing is outlined as follows.
The kernel matrix of the k-th expert is obtained as , in accordance with Equation (1).
According to Equation (2), the consistency index
of
can be determined.
If , then satisfies the consistency criterion and proceed to step 7; otherwise, proceed to the next step. can be identified as the critical value of the consistency indexes.
The eigenvalue matrix
can be calculated for the kernel matrix
, denoted as follows.
where the vector
represents the sorted values, where
.
The deviation matrix O can be calculated for the kernel matrix , where , .
If , proceed to step 6; if , appropriately decrease by a value of , that is, , and correspondingly increase by the same value, that is, . Where represents the adjustment quantity with .
If remains less than zero, then appropriately increase , denoted as , and correspondingly decrease , denoted as .
If the consistency requirement is not satisfied, proceed to step 1; otherwise, generate output.
4.3. Weight Calculation
According to Equation (4), the evaluation information from various experts is synthesized.
and
can be obtained. Then, the weights between each layer and the fuzzy evaluation values of each indexes
can be calculated as follows.
The fuzzy evaluation value of index
is expected as follows.
The relative weights of each index are determined by normalizing Equation (7).
where
represents the relative weight assigned to index
.
4.4. Normalization Calculation of Index Values
Each attribute of the evaluation criteria is assigned a performance rating, which reflects their respective characteristics. It is a frequent occurrence for performance evaluations to utilize diverse units of measurement for various criteria, thus necessitating the quantification and standardization of these criteria in order to facilitate comparability. The method of linear scale transformation takes into account the maximum and minimum performance ratings for attributes when performing the calculations. This approach offers the benefit of ensuring that the scale measurement falls exclusively within the range of 0 to 1 for every attribute [
68]. In general, the evaluation criteria can be categorized into two types: those that emphasize greater and superior relative value (referred to as benefit type) and those that focus on the opposite (referred to as cost type).
For the performance criteria of the three types of earthquake search and rescue robots in this paper, the criteria
C11,
C12,
C13,
C21,
C23,
C25,
C26,
C27,
C28,
C29,
C210,
C12,
C31,
C32,
C33,
C41,
C42, and
C43 are benefit type criteria. The criteria
C22,
C24,
C211,
C212, and
C41 are cost type criteria. To ensure ease of plotting and subsequent data processing, Equation (8) is employed to normalize the benefit type criteria, while Equation (9) is utilized for normalizing the cost type criteria.
where
and
are the maximum and minimum performance ratings for attributes
among the alternatives, respectively.
The specific results of the three types of earthquake search and rescue robots (Sample A, Sample B, and Sample C) after testing and normalization are presented in
Table 6.
5. Improved Radar Chart
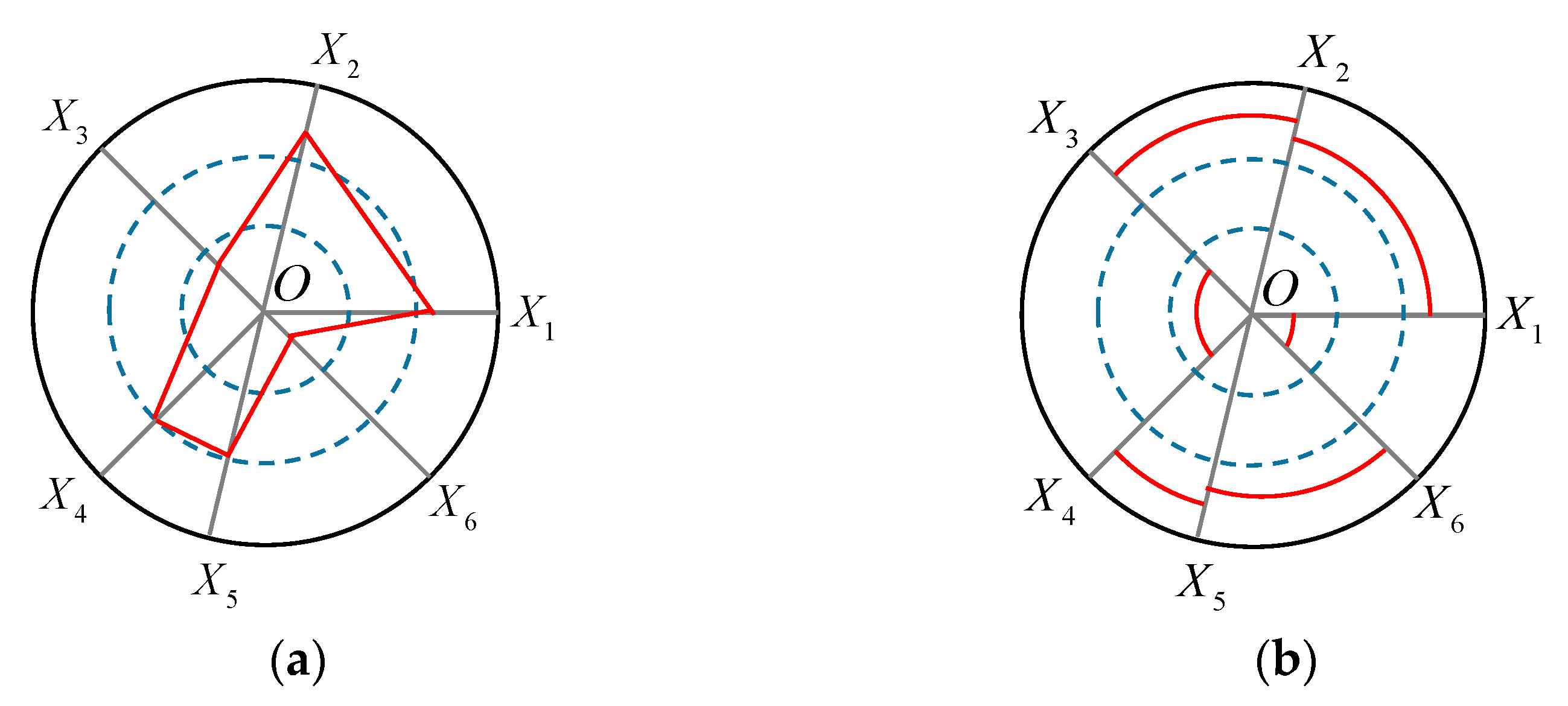
The conventional radar chart method is founded upon the unit circle, where the radial line extending from the center to the circumference serves as the axis of evaluation corresponding to each criterion. The normalized evaluation criteria are plotted on their corresponding axes, and the points marked on these axes are connected in sequence to form a closed polygon. This process yields the radar chart of the evaluated object, as shown in
Figure 5a. However, due to the variation in index order, which results in the connection of marker points and leads to polygons of varying shapes, the conventional radar chart method fails to yield a unique final evaluation outcome. Therefore, This paper introduces an improved radar chart method, as illustrated in
Figure 5b, to address this issue. The analysis procedure of the improved radar chart method encompasses the subsequent steps.
The unit circle, centered at O, is partitioned into n sectors according to a selected set of criteria, where each sector represents the domain corresponding to its respective criterion. By utilizing the equation , the weights () assigned to evaluation criterion Xi are subsequently transformed into central angles ().
The axis can be set as sector radius, and the corresponding criterion axis is labeled with the normalized quantitative value of each criterion.
The radius (
) is considered as the calibration value, while the determination of the central angle (
) depends on the weight assigned. This weight is utilized for drawing a circular arc, as depicted in
Figure 5b.
The evaluation result is derived from the criterion of eigenvectors utilizing the dimensions of both area and perimeter in the improved radar chart [
69].
By utilizing the improved radar chart, the values for area
and perimeter
can be derived, which represent the overall strengths of the evaluated object and the balance between different evaluation criteria. The evaluation object is considered better when the area in the radar chart is larger. In cases where the area remains constant, a larger perimeter indicates a more balanced set of criteria. The area and perimeter of the radar chart are defined as follows.
where
denotes the overall merits of subject being evaluated,
signifies the balance achieved among different criteria for evaluation,
n represents the number of criteria.
Utilizing the established eigenvectors
and
, the evaluation vector
can be defined as follows.
where
is the area evaluation value. The magnitude of the value is directly proportional to the degree of comprehensiveness in evaluating the object. Similarly,
is the perimeter evaluation value. The magnitude of the value reflects a higher level of equilibrium in the fluctuations of the evaluation object’s criterion. As a result, the evaluation vector takes into account both the extent of change in the object being evaluated and the level of balance for each criterion.
The geometric average method is adopted to construct the evaluation function. The larger the value is, the better the comprehensive performance is. The formulation of the evaluation function is shown as follows.
where
represents the comprehensive performance value.
6. Application
Three evaluators who are decision-makers in the field of rescue robots have meticulously chosen, each with distinct backgrounds and extensive experience. The first evaluator has a Ph.D. degree and boasts more than two decades of research proficiency in robot motion control and drive. The second decision maker is an engineer specializing in earthquake rescue robot exploration and rescue technology, who has made significant contributions to the development of testing and evaluation processes. The third decision maker is a member of an earthquake emergency rescue team, possessing extensive knowledge about the practical application scenarios for earthquake rescue robots. According to
Table 7, the
value of the criterion layer relative to the target layer was determined by each decision maker. The consistency indexes were calculated as
,
, and
, all falling below the predefined threshold
.
According to Equations (4)–(7), The corresponding weights for the performance of earthquake search and rescue robots can be further obtained
. The results highlight that detection perception capability is recognized as a crucial factor influencing the selection of earthquake search and rescue robots based on their performance. According to the same principle, the relative weight of each index with respect to each criterion can be derived, as illustrated in
Table 8.
The findings indicate that the probability of life body identification C31 has the most significant impact on the performance of earthquake search and rescue robots, followed by the Success rate of the operating interface C42 and Continuous working time with an independent power supply C11. This is because efficiently locating survivors in earthquake debris is the primary function of earthquake search and rescue robots, and the duration of their operation significantly affects search and rescue effectiveness. Ensuring accurate communication data between the robot and operator serves as a crucial guarantee for successful survivor detection by the earthquake search and rescue robot. However, while enhancing the overall performance of earthquake search and rescue robots, the Mass-to-volume ratio C21, Unit pressure exerted by the tracked device on the ground C22, and Subversive resistance on complex road surface C211 are less significant. Additionally, the survivability of the earthquake search and rescue robot is significantly impacted by Continuous working time with an independent power supply C11. The mobility of the earthquake search and rescue robot is significantly impacted by the Maximum width across trenches C25, Maximum height of obstacles to be overcome C26, Maximum angle for climbing C27, Number of steps climbed per unit time C28 and Success rate of mechanism transformation C29. The detection perception ability of the earthquake search and rescue robot is significantly impacted by the Probability of life body identification C31. The Communication control ability of the earthquake search and rescue robot is significantly impacted by the Success rate of the operating interface C42.
The data presented in
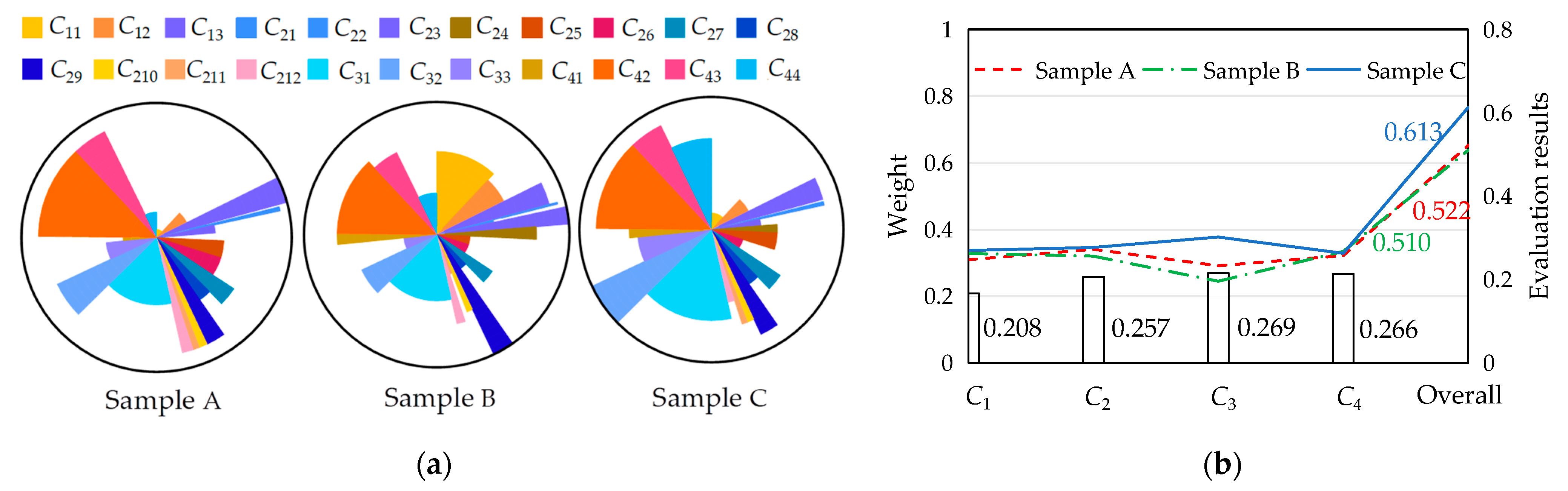
Table 6 and
Table 8 have been incorporated into the improved radar chart, as depicted in
Figure 6a. The findings demonstrate that Sample C offers a viable solution for enhancing the capability of earthquake search and rescue robots to effectively penetrate debris and locate survivors while aiding rescuers in establishing access routes. By utilizing Sample C, the associated risks with search and rescue operations can be mitigated, thereby leading to improved overall efficiency of rescue efforts. The overall evaluation results for both Sample A and Sample B are strikingly alike; however, Sample B demonstrates a higher level of proportionality across all criteria compared to Sample A. After that, by applying Equation (12), the colored sections within the improved radar chart are analyzed to determine their area and perimeter, resulting in the extraction of evaluation results for each respective section.
The order of performance ranking for the three earthquake search and rescue robots is as follows: Sample C (the evaluation result is 0.613) outperforms Sample A (the evaluation result is 0.522), which in turn outperforms Sample B (the evaluation result is 0.510), as depicted in
Figure 6b. The height of a rectangle represents the weight assigned to each criterion, with weights of 0.208 for survivability, 0.257 for mobility, 0.269 for Detection perception ability, and 0.266 for Communication control ability. It is clear that Sample B surpasses in Survivability and Communication control ability but falls behind in Mobility and Detection perception ability. Sample B demonstrates lower walking performance values, including Minimum turning radius
C24, Maximum width across trenches
C25, Maximum height of obstacles to be overcome
C26, Maximum angle for climbing
C27, and Number of steps climbed per unit time
C28, which are deemed important factors by experts. Consequently, this results in the comparatively inferior performance of sample B among the three earthquake search and rescue robots.
7. Sensitivity Analysis
The weights of criteria may continuously fluctuate throughout the entire project ranking process, potentially impacting the final rankings. Conducting sensitivity analysis facilitates a better understanding of the significance and priority of each criterion, ensuring that crucial factors are adequately considered during the project ranking process. In the case of selecting earthquake search and rescue robots, it is imperative to perform sensitivity analysis to assess their robustness and reliability. This analysis aids in comprehending potential outcomes under different circumstances and facilitates necessary measures to ensure that selected earthquake search and rescue robots remain competent in any situation.
In this paper, the perturbation method is adopted to conduct sensitivity analysis on index weight; that is, after the index weight in the decision is slightly perturbed, the change of scheme ordering under the same decision framework is observed. Assuming that the weight of the initial index
is
, the index weight after disturbance changes to
, where
and
. Simultaneously, the weights of other indexes undergo adjustments as
,
. The adjusted weights satisfy the following conditions.
Equation (13) can be transformed into . Therefore, for each index weight , when different t is taken, m index weights can be disturbed, and m groups of index weights after disturbance can also be obtained.
According to the variation of Equation (13), different values of
t correspond to distinct index weight
. The four criteria weights are individually perturbed, resulting in the derivation of four new criteria weights. It is important to note that when adjusting the weight of an individual criterion, it is necessary to normalize all criteria weights to maintain consistency in the weighted scheme. The detailed data can be found in
Table 9.
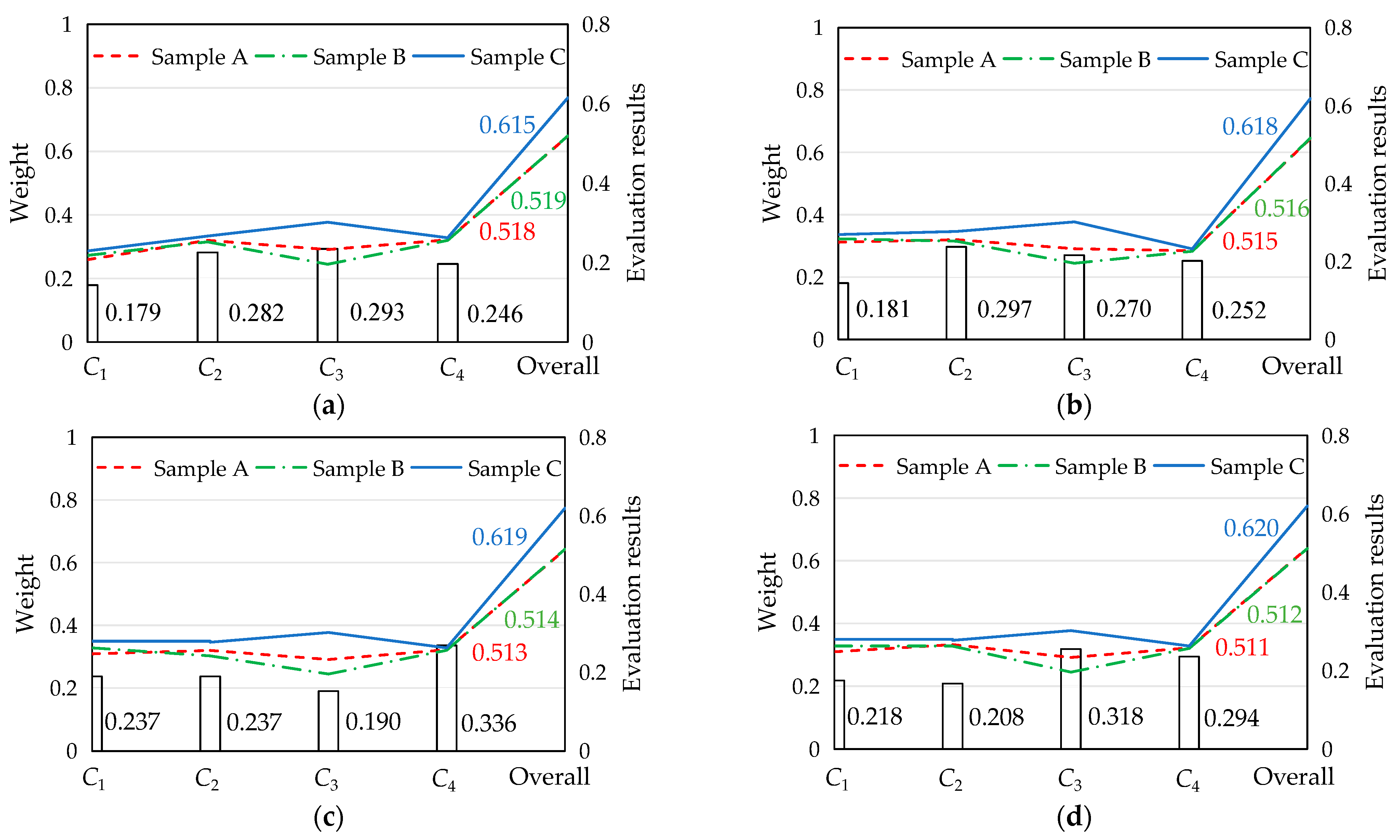
The impact of weight changes on the sample grades can be observed in
Figure 7. Sample A is evaluated as the third grade, and Sample B is evaluated as the second grade when the weight of the Survivability criterion decreases from its initial value of 0.208 in
Figure 7a to 0.179 or below or when the weight of the Mobility criterion increases from its initial value of 0.257 in
Figure 7b to 0.297 or above, or when the weight of Detection perception ability criterion decreases from its initial value of 0.269 in
Figure 7c to 0.19 or below, or when the weight of Communication control ability criterion increases from its initial value of 0.266 in
Figure 7d to 0.294 or above.
Sample C consistently maintains a leading position in the performance evaluation of earthquake search and rescue robots, demonstrating its resilience against changes in other criterion weights. This finding suggests that the performance evaluation system for these robots is relatively insensitive to variations in criterion weights, indicating a certain level of stability and reliability. However, the sensitivity analysis reveals that ranking results are more responsive to changes in the weights assigned to detection perception ability while being less sensitive to alterations in survivability weights. This discovery implies that detection perception ability plays a crucial role in determining the performance ranking of earthquake search and rescue robots, aligning with our expectations as these robots need exceptional perception abilities to swiftly identify and locate trapped individuals within complex environments. Therefore, when formulating performance evaluation criteria for such robots, criteria related to detection perception ability should be thoroughly considered as they significantly enhance actual rescue effectiveness. Simultaneously, it is important to strike a balance among various criterion weights and avoid overemphasizing one aspect at the expense of neglecting other vital performances; this approach ensures better fulfillment of earthquake search and rescue robot requirements during real-life scenarios.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}