
Design and Multi-Objective Optimization for Improving Torque Performance of a Permanent Magnet-Assisted Synchronous Reluctance Motor



Abstract
1. Introduction
2. Machine Topology and Simulation Results
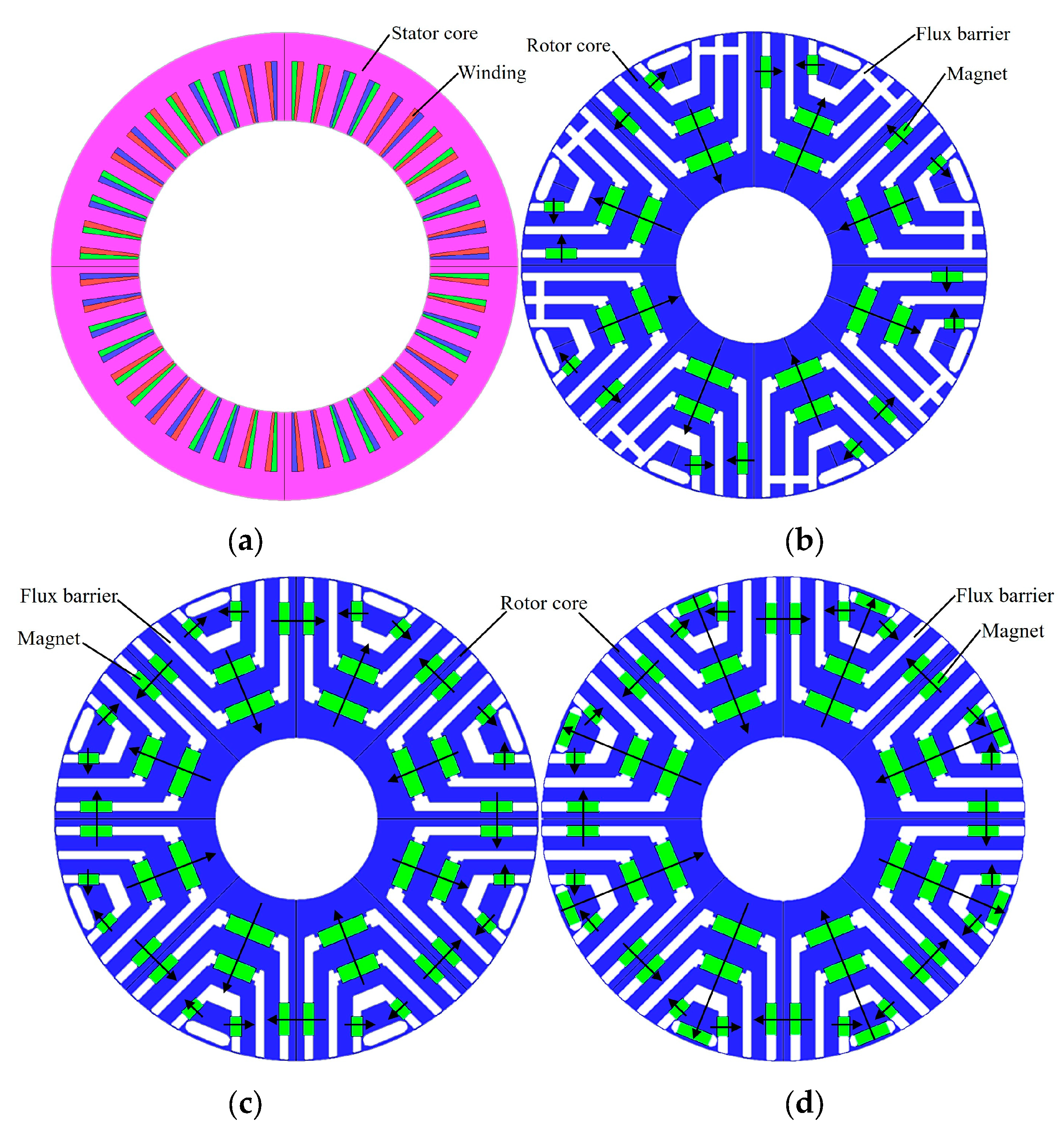
2.1. Machine Topology
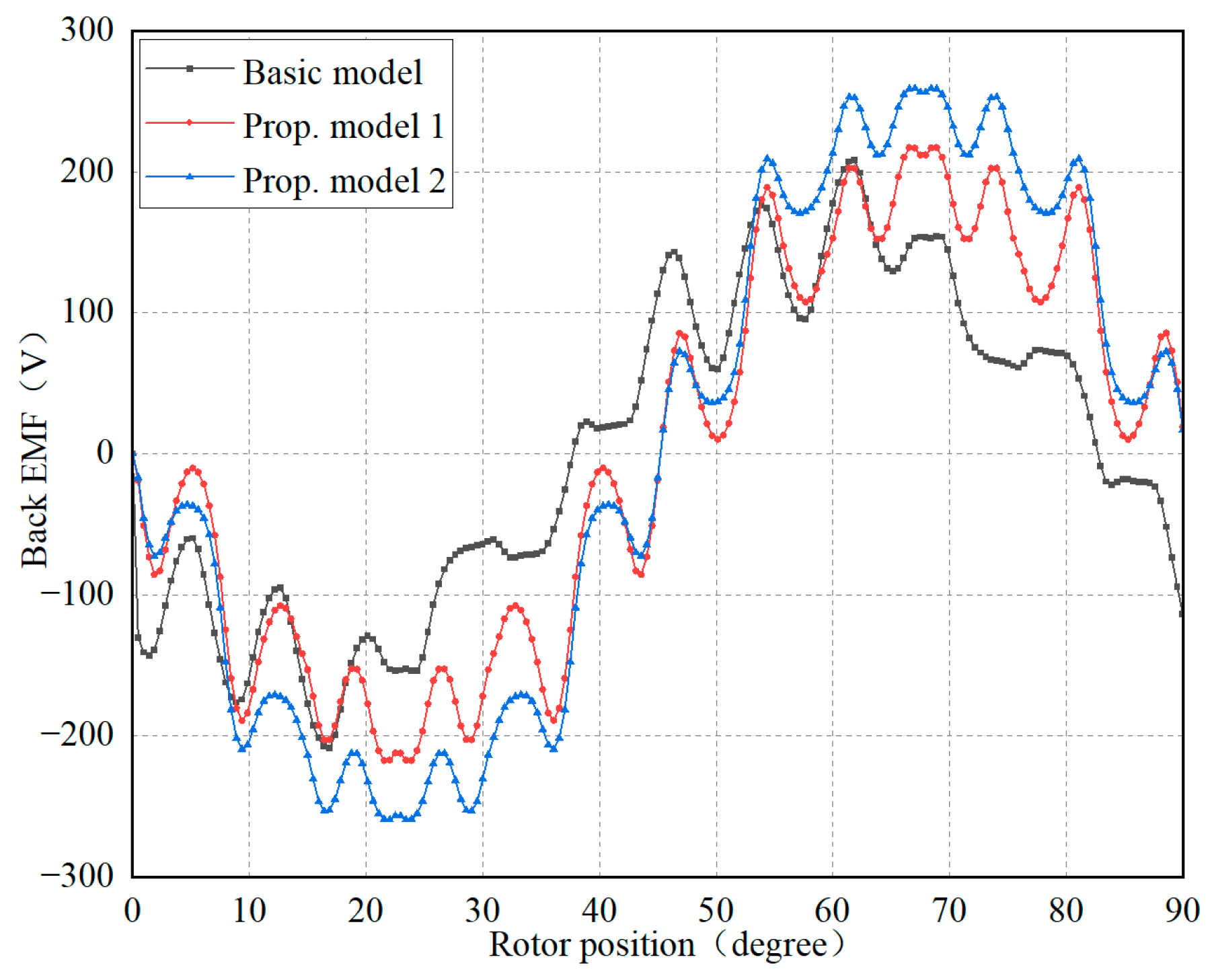
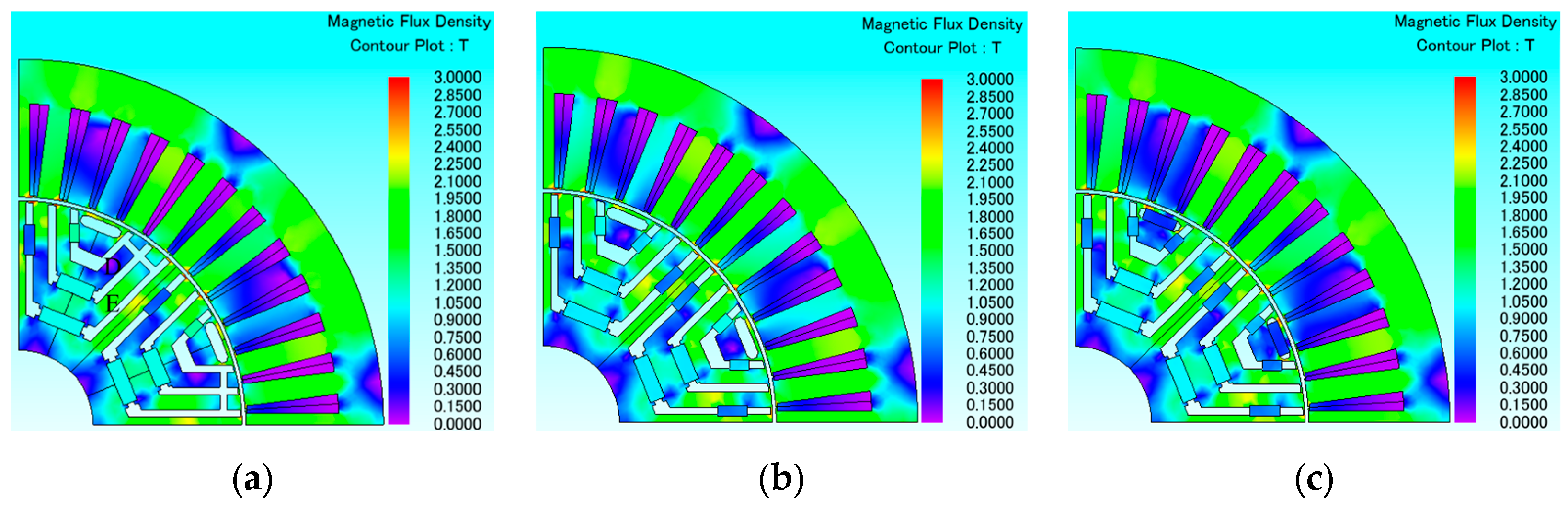
2.2. No-Load Characteristics Analysis
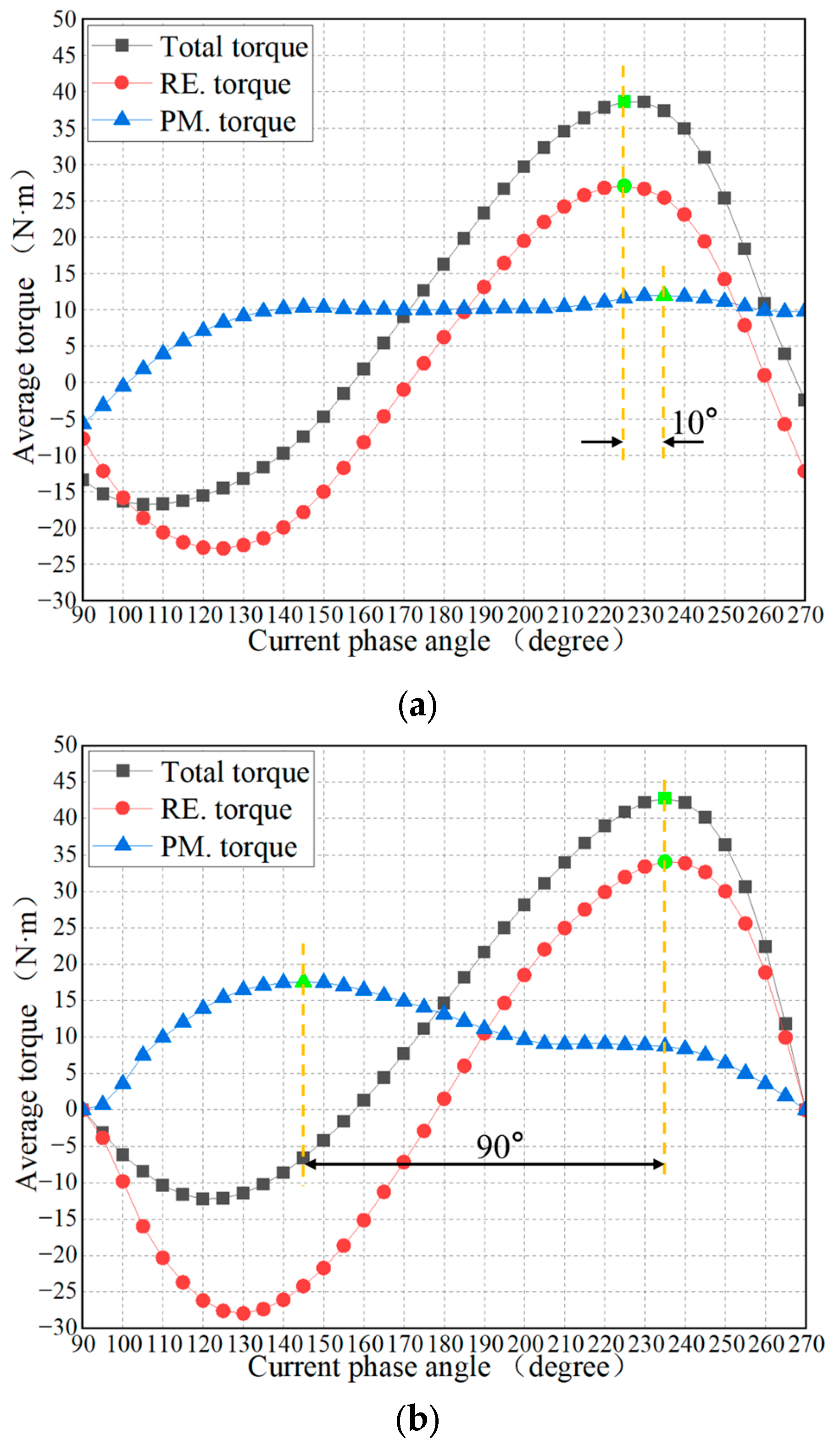
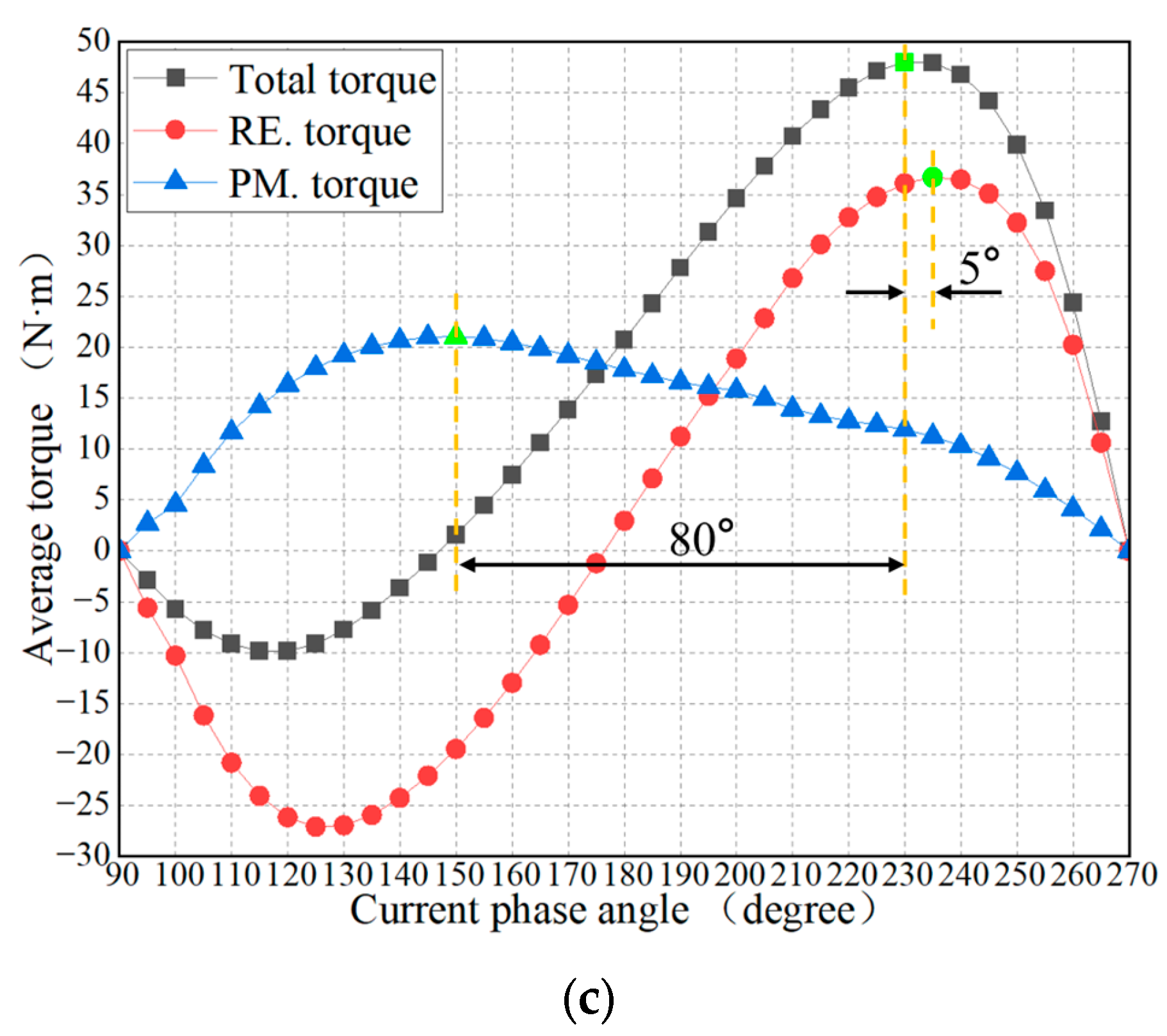
2.3. On-Load Characteristics Analysis
3. Multi-Objective Optimization
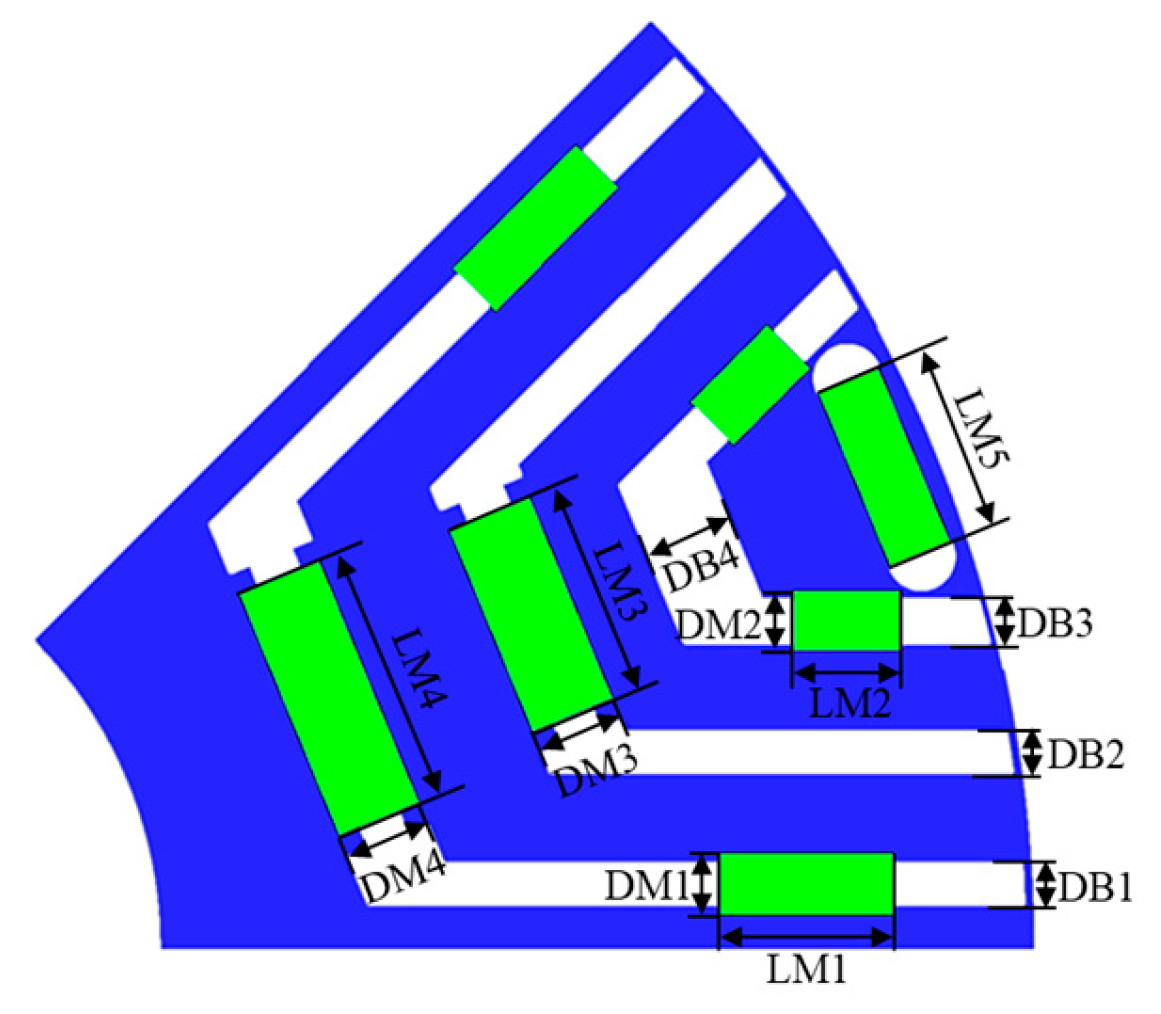
3.1. Multi-Objective Optimization Size
3.2. Uniform Latin Hypercube Sampling and Sensitivity Analysis
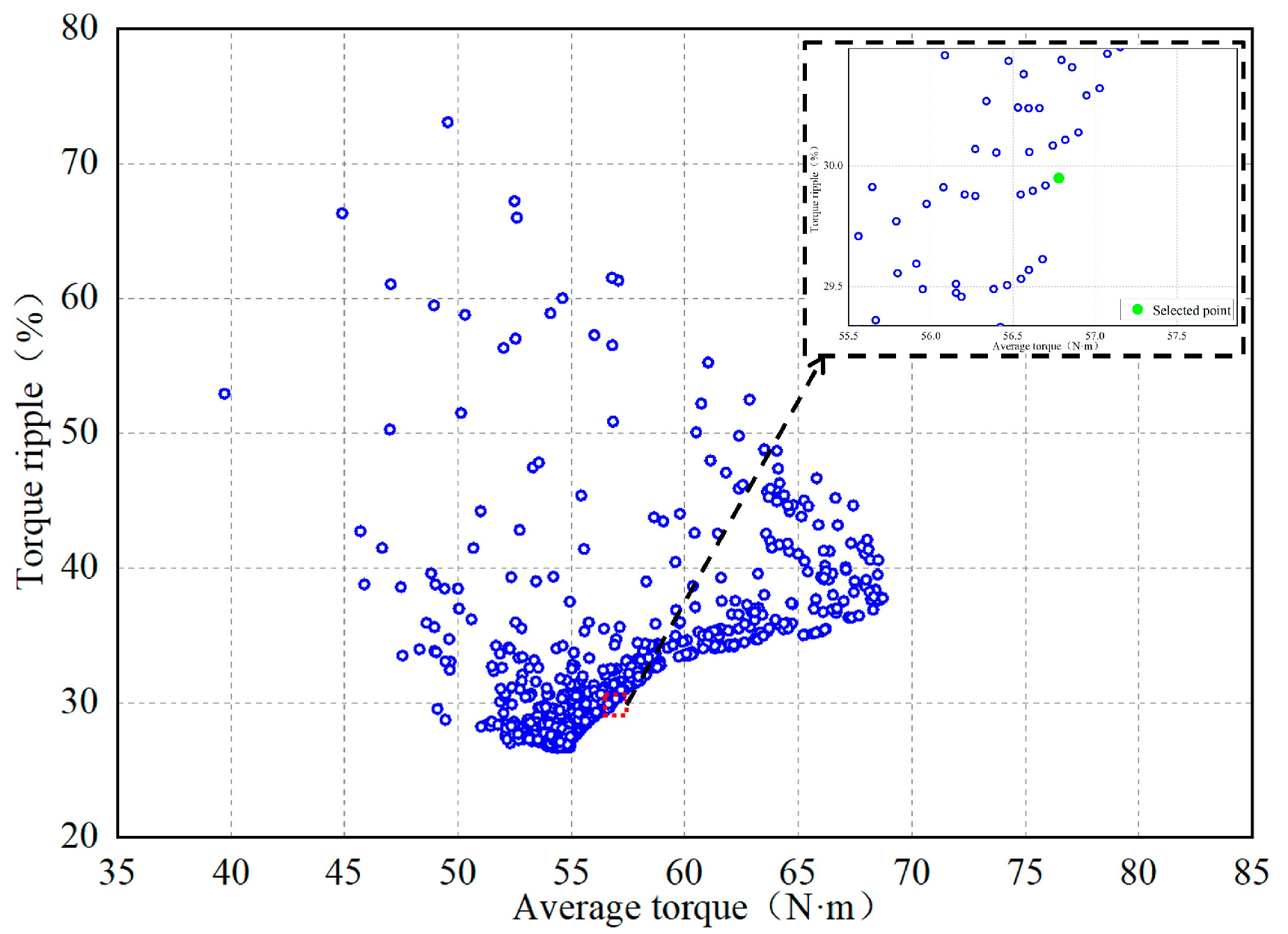
3.3. Multi-Objective Optimization of pilOPT Algorithm
4. Performance Analysis of Optimized Model
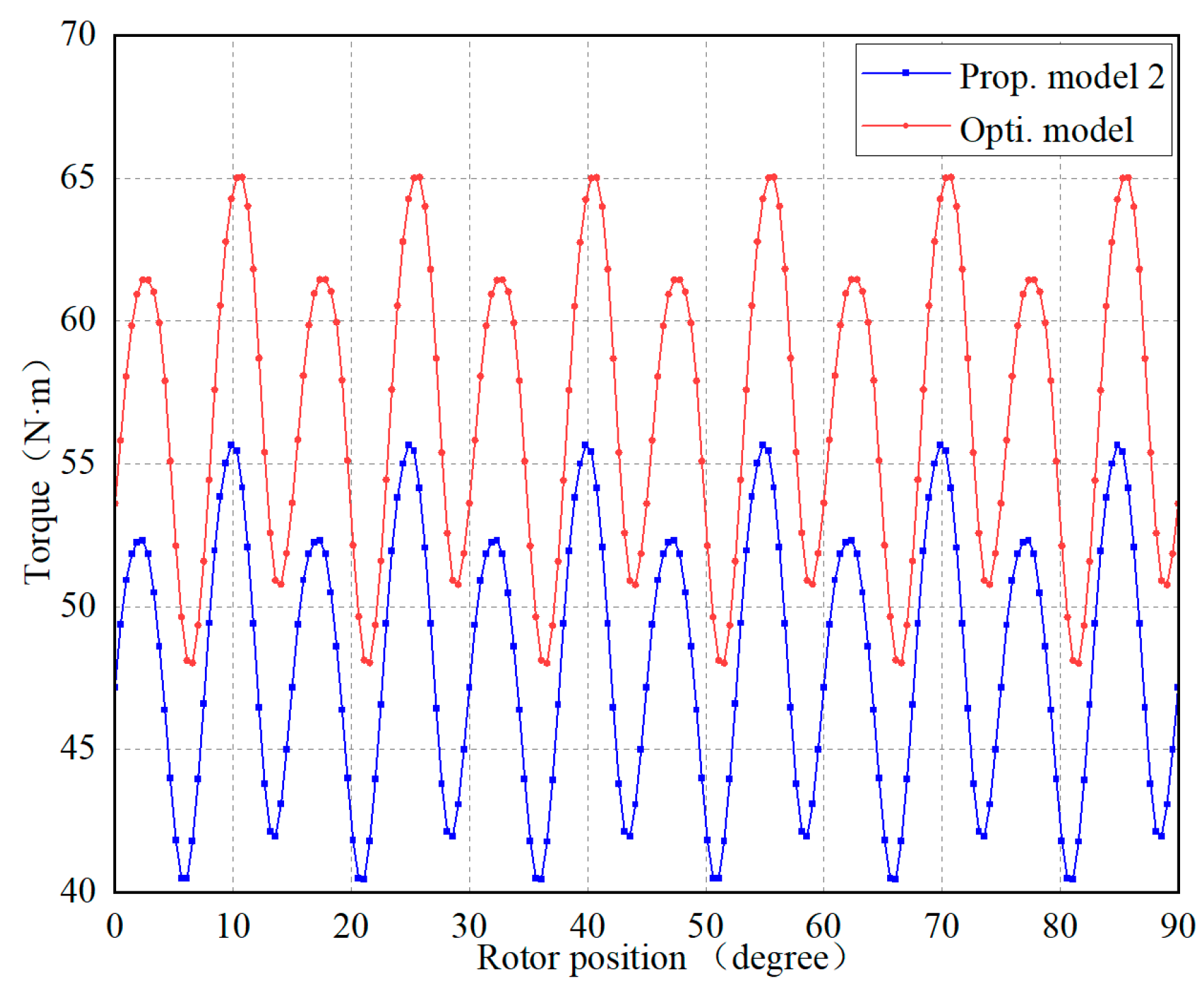
4.1. Comparison of Optimized Model Performance
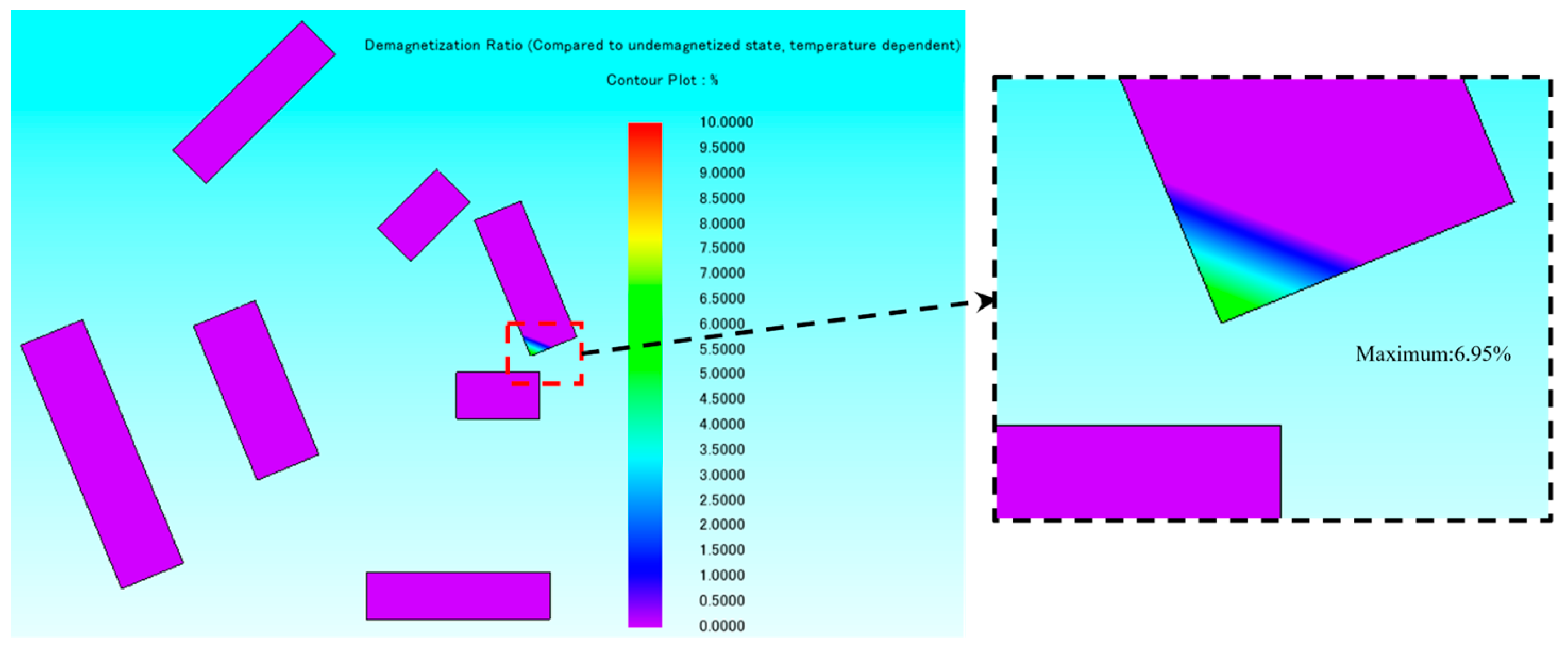
4.2. Performance Analysis of Anti-Demagnetization
5. Conclusions
- (1)
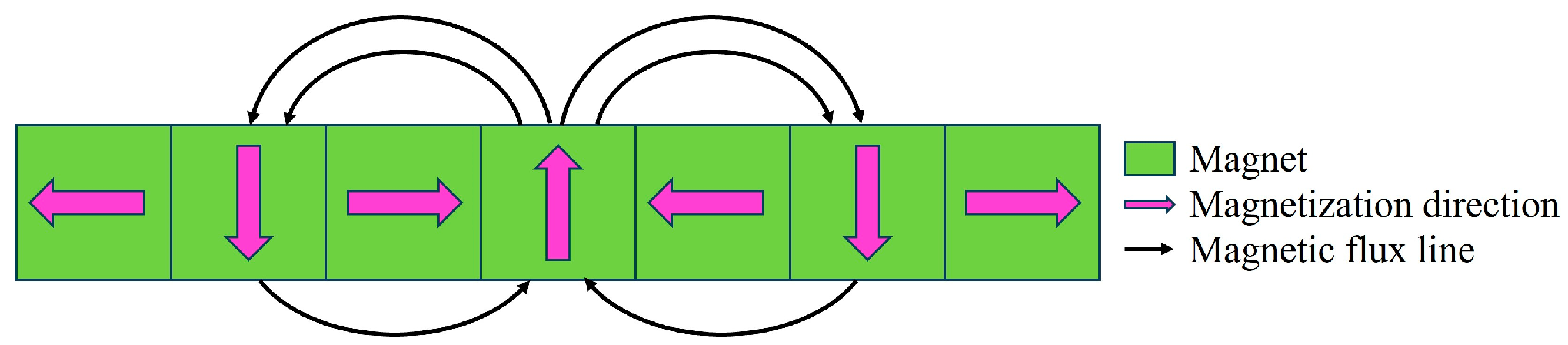
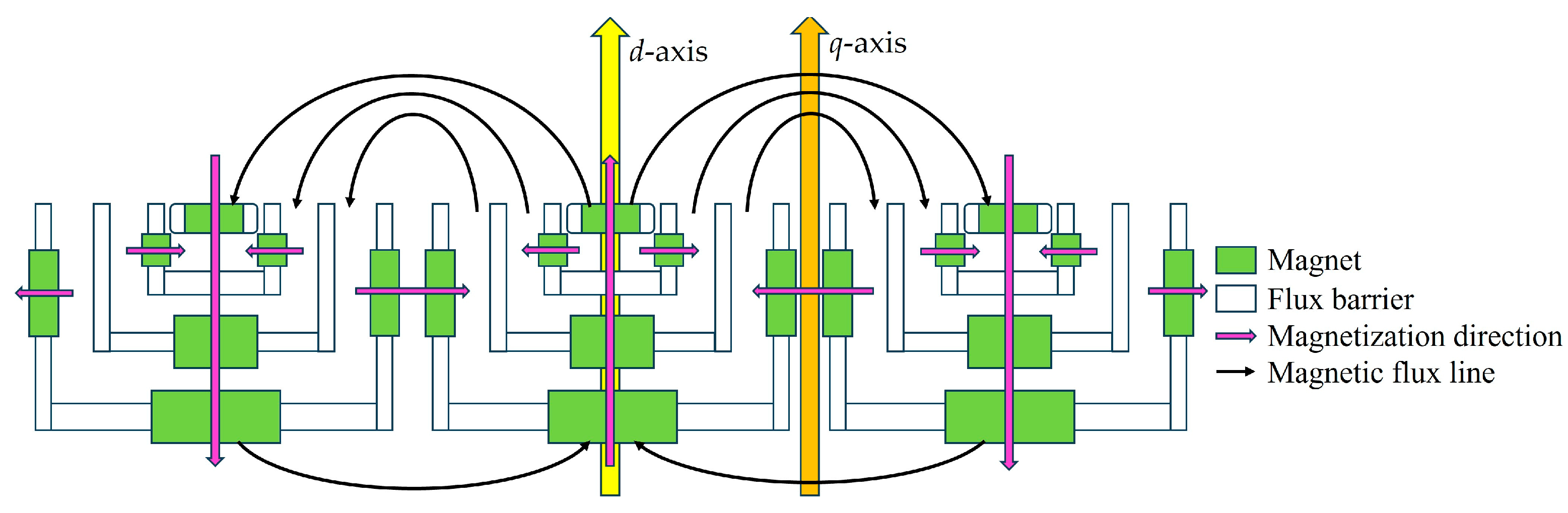
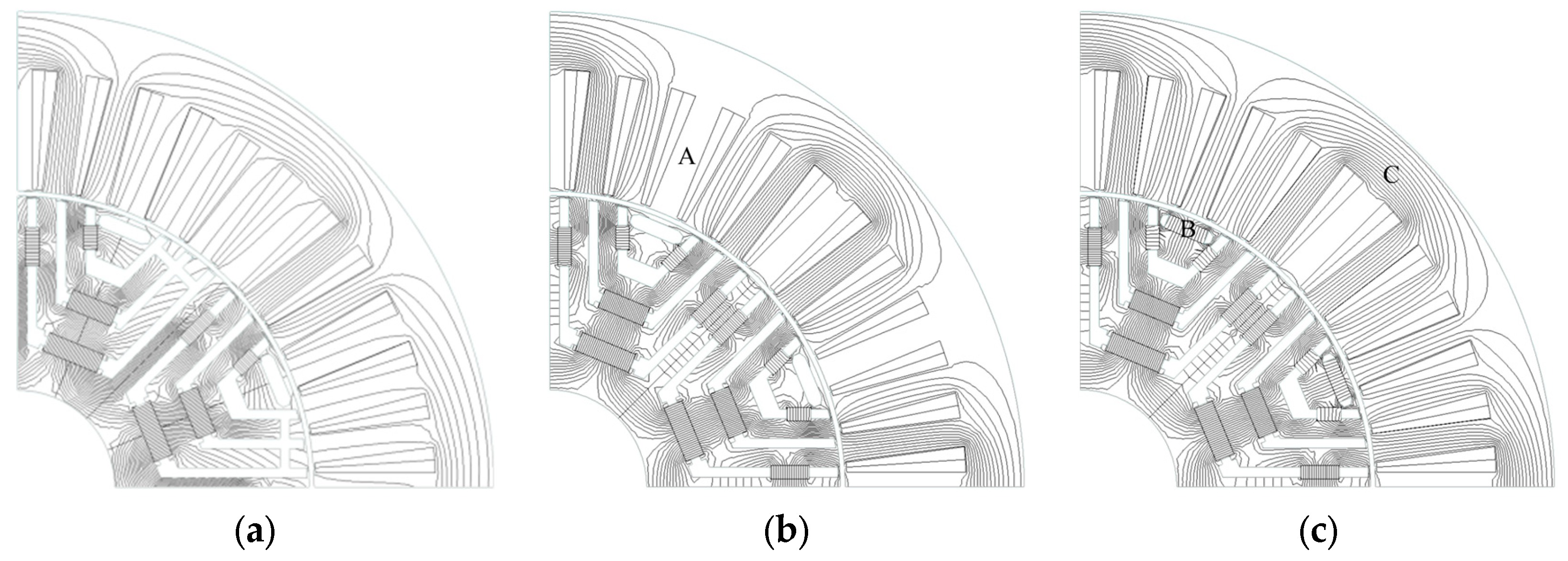
- The magnetic field line distribution, air gap magnetic density and back EMF under no-load conditions were analyzed. It was proven that the magnetic focusing effect exists in the proposed model, and the excitation effect is obviously improved.
- (2)
- Under load conditions, proposed model two had a more saturated internal magnetic circuit than the basic model, with an average torque increase of 24.08% and an efficiency improvement of 1.45%.
- (3)
- After multi-objective optimization of the rotor magnetic barrier and permanent magnet size of the proposed model two, under no-load conditions, the RMS value of the air gap magnetic density increased by 41.99%, and the RMS value of back EMF increased by 43.85%. Under load conditions, the average torque was increased by 18.14%, the torque ripple was decreased by 5.22%, the total loss was decreased by 1.35%, and the efficiency was increased by 1.05% compared to the initial proposed model two.
- (4)
- After conducting an anti-demagnetization analysis on the optimized model, the simulation results show that the structure of the model has good demagnetization resistance and positive reliability.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wu, S.; Sun, X.; Tong, W. Optimization Design of High-speed Interior Permanent Magnet Motor with High Torque Performance Based on Multiple Surrogate Models. CES Trans. Electr. Mach. Syst. 2022, 6, 235–241. [Google Scholar] [CrossRef]
- Huynh, T.A.; Peng, J.X.; Hsieh, M.F.; Huang, P.W. Anti-Demagnetization Analysis of Fractional Slot Concentrated Windings Interior Permanent Magnet Motor Considering Effect of Rotor Design Parameters. IEEE Trans. Magn. 2022, 58, 8201606. [Google Scholar] [CrossRef]
- Zhang, Z. Design and Experimental Verification of Low Cost Ferrite PM-Assisted Synchronous Reluctance Motor. In Proceedings of the 2020 IEEE Transportation Electrification Conference & Expo (ITEC), Chicago, IL, USA, 23–26 June 2020; pp. 327–334. [Google Scholar]
- Bianchi, N.; Bolognani, S.; Carraro, E.; Castiello, M.; Fornasiero, E. Electric Vehicle Traction Based on Synchronous Reluctance Motors. IEEE Trans. Ind. Appl. 2016, 52, 4762–4769. [Google Scholar] [CrossRef]
- Lim, D.K.; Yi, K.P.; Woo, D.K.; Yeo, H.K.; Jong-Suk, R.; Lee, C.G.; Jung, H.K. Analysis and Design of a Multi-Layered and Multi-Segmented Interior Permanent Magnet Motor by Using an Analytic Method. IEEE Trans. Magn. 2014, 50, 8201308. [Google Scholar] [CrossRef]
- Nasr, A.; Chareyron, B.; Abdenour, A.; Milosavljevic, M. Design of a Permanent Magnet assisted Synchronous Reluctance motor using Ferrites. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; pp. 1758–1764. [Google Scholar]
- Kumar, J.; Gowtham, V.; Sampathirao, S. Comparison of Synchronous Reluctance, PM assisted Synchronous Reluctance and Spoke-Type BLDC Motor for an E-Rickshaw. In Proceedings of the 2021 22nd IEEE International Conference on Industrial Technology (ICIT), Valencia, Spain, 10–12 March 2021; pp. 172–177. [Google Scholar]
- Bianchi, N.; Fornasiero, E.; Soong, W. Selection of PM Flux Linkage for Maximum Low-Speed Torque Rating in a PM-Assisted Synchronous Reluctance Machine. IEEE Trans. Ind. Appl. 2015, 51, 3600–3608. [Google Scholar] [CrossRef]
- Ntontis, K.; Martis, C.S. An Effort to Replace Interior Permanent Magnets Rotors with Assisted Reluctance Rotors. In Proceedings of the 2022 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Sorrento, Italy, 22–24 June 2022; pp. 294–298. [Google Scholar]
- Zhao, W.; Zhao, F.; Lipo, T.A.; Kwon, B.I. Optimal Design of a Novel V-Type Interior Permanent Magnet Motor with Assisted Barriers for the Improvement of Torque Characteristics. IEEE Trans. Magn. 2014, 50, 8104504. [Google Scholar] [CrossRef]
- Wang, Y.; Bacco, G.; Bianchi, N. Geometry Analysis and Optimization of PM-Assisted Reluctance Motors. IEEE Trans. Ind. Appl. 2017, 53, 4338–4347. [Google Scholar] [CrossRef]
- Zhequan, W.; Dejun, Y.; Lujun, C.; Jia, F. Design of Magnetic Barrier Angle of Permanent Magnet Assisted Synchronous Reluctance Motor Based on Minimum Torque Ripple. In Proceedings of the 2022 7th Asia Conference on Power and Electrical Engineering (ACPEE), Hangzhou, China, 15–17 April 2022; pp. 1712–1716. [Google Scholar]
- Xu, G.; Liu, G.; Zhao, W.; Chen, Q.; Du, X. Principle of Torque-Angle Approaching in a Hybrid Rotor Permanent-Magnet Motor. IEEE Trans. Ind. Electron. 2019, 66, 2580–2591. [Google Scholar] [CrossRef]
- Maroufian, S.S.; Pillay, P. Design and Analysis of a Novel PM-Assisted Synchronous Reluctance Machine Topology with AlNiCo Magnets. IEEE Trans. Ind. Appl. 2019, 55, 4733–4742. [Google Scholar] [CrossRef]
- Amin, M.; Aziz, G.A.A. Hybrid Adopted Materials in Permanent Magnet-Assisted Synchronous Reluctance Motor with Rotating Losses Computation. IEEE Trans. Magn. 2019, 55, 8103305. [Google Scholar] [CrossRef]
- Ferrari, M.; Bianchi, N.; Fornasiero, E. Analysis of Rotor Saturation in Synchronous Reluctance and PM-Assisted Reluctance Motors. IEEE Trans. Ind. Appl. 2015, 51, 169–177. [Google Scholar] [CrossRef]
- Nobahari, A.; Vahedi, A.; Nasiri-Zarandi, R. A Modified Permanent Magnet-Assisted Synchronous Reluctance Motor Design for Torque Characteristics Improvement. IEEE Trans. Eng. Conv. 2022, 37, 989–998. [Google Scholar] [CrossRef]
- Diao, C.; Zhao, W.; Liu, Y.; Wang, X. Permanent Magnet Assisted Synchronous Reluctance Motor with Asymmetric Rotor for High Torque Performance. CES Trans. Electr. Mach. Syst. 2023, 7, 179–186. [Google Scholar] [CrossRef]
- Duan, L.; Lu, H.; Zhao, C.; Shen, H. Influence of Different Halbach Arrays on Performance of Permanent Magnet Synchronous Motors. In Proceedings of the 2020 IEEE International Conference on Artificial Intelligence and Computer Applications (ICAICA), Dalian, China, 27–29 June 2020; pp. 994–998. [Google Scholar]
- Yu, Z.; Yan, L.; Zhou, Y.; Liu, J.; He, X.; Aboelhassan, A. Performance Analysis of PMSM Based on Improved Trapezoidal Halbach Magnet Arrays. In Proceedings of the 2022 IEEE 17th Conference on Industrial Electronics and Applications (ICIEA), Chengdu, China, 16–19 December 2022; pp. 1267–1271. [Google Scholar]
- Liu, X.; Zheng, X.; Wang, X. Modeling of Uneven Air Gap Magnetic Field for Disc Planetary Permanent Magnet Machine with Segmented Gap Halbach Array. IEEE Trans. Eng. Conv. 2023, 38, 693–702. [Google Scholar] [CrossRef]
- Liu, C.; Sun, J.; Zhang, Y.; Shang, J. Theoretical Analysis and Structural Optimization of Ultrathin Permanent Magnet Linear Array Motor. In Proceedings of the 2023 26th International Conference on Electrical Machines and Systems (ICEMS), Zhuhai, China, 5–8 November 2023; pp. 5044–5047. [Google Scholar]
- Zhou, H.; Liu, Y.; Yang, C. A High-Torque Flux-Modulated Permanent Magnet Motor with Reduced Low-Order Spatial Harmonics. In Proceedings of the 2023 26th International Conference on Electrical Machines and Systems (ICEMS), Zhuhai, China, 5–8 November 2023; pp. 4749–4754. [Google Scholar]
- Hu, J.Q.; Jiang, R.H.; Zhu, S.S.; Liu, C.; Wang, K. Multi-Objective Optimization Design of Permanent Magnet Assisted Synchronous Reluctance Motor. In Proceedings of the 2023 26th International Conference on Electrical Machines and Systems (ICEMS), Zhuhai, China, 5–8 November 2023; pp. 3849–3853. [Google Scholar]
- Kim, J.B.; Hwang, K.Y.; Kwon, B.I. Optimization of Two-Phase In-Wheel IPMSM for Wide Speed Range by Using the Kriging Model Based on Latin Hypercube Sampling. IEEE Trans. Magn. 2011, 47, 1078–1081. [Google Scholar] [CrossRef]
- Hidaka, Y. Multi-Objective Topology Optimization Method for Hybrid-Type Motors Combining Combinatorial Optimization and Local Search. IEEE Trans. Magn. 2024, 60, 8200404. [Google Scholar] [CrossRef]
- Hua, Y.; Zhu, H.; Gao, M.; Ji, Z. Multiobjective Optimization Design of Permanent Magnet Assisted Bearingless Synchronous Reluctance Motor Using NSGA-II. IEEE Trans. Ind. Electron. 2021, 68, 10477–10487. [Google Scholar] [CrossRef]
- Hu, Y.; Li, L.; Chen, B.; Xiao, Y.; Li, X.; Shi, J. Demagnetization Analysis of a Line Start PM-Assisted Synchronous Reluctance Motor. In Proceedings of the 2021 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Republic of Korea, 31 October–3 November 2021; pp. 1157–1161. [Google Scholar]
- Zhang, Z.Y.; Tsai, M.C.; Huang, P.W.; Cheng, C.W.; Huang, J.M. Characteristic comparison of transversally laminated anisotropic synchronous reluctance motor fabrication based on 2D lamination and 3D printing. In Proceedings of the 2015 18th International Conference on Electrical Machines and Systems (ICEMS), Pattaya, Thailand, 25–28 October 2015; pp. 894–897. [Google Scholar]
- Li, G. A Pearson Based Feature Compressing Model for SNARE Protein Classification. IEEE Access 2020, 8, 136560–136569. [Google Scholar] [CrossRef]
- Llopis-Albert, C.; Rubio, F.; Zeng, S. Multiobjective Optimization Framework for Designing A Vehicle Suspension System. A Comparison of Optimization Algorithms. Adv. Eng. Softw. 2023, 176, 103375. [Google Scholar] [CrossRef]
- Wang, K.; Li, J.; Zhu, S.S.; Liu, C. Novel Hybrid-Pole Rotors for Consequent-Pole PM Machines without Unipolar Leakage Flux. IEEE Trans. Ind. Electron. 2019, 66, 6811–6823. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Unit | Basic Model/Prop. Model 1/Prop. Model 2 |
|---|---|---|
| Pole/Slot | / | 8/48 |
| Stator outer diameter | mm | 98 |
| Stator inner diameter | mm | 61 |
| Rotor outer diameter | mm | 60 |
| Rotor inner diameter | mm | 15 |
| Air gap length | mm | 0.5 |
| Motor axial length | mm | 100 |
| Remanence of magnet | T | 1.28 |
| Item | Unit | Basic Model | Prop. Model 1 | Prop. Model 2 |
|---|---|---|---|---|
| Back EMF (RMS) | V | 113.726 | 140.394 | 178.605 |
| Air gap flux density (RMS) | T | 0.295 | 0.435 | 0.412 |
| Item | Unit | Basic Model | Prop. Model 1 | Prop. Model 2 |
|---|---|---|---|---|
| Average torque | N·m | 38.784 | 42.775 | 48.123 |
| Torque ripple | % | 26.688 | 26.059 | 31.582 |
| Power | W | 6680.77 | 7304.68 | 8126.77 |
| Total loss | W | 513.789 | 514.597 | 515.822 |
| Efficiency | % | 92.31 | 92.96 | 93.65 |
| Name | Item | Unit | Optimization Scope |
|---|---|---|---|
| PM1 length | LM1 | mm | 4~12.5 |
| PM2 length | LM2 | mm | 2.5~3 |
| PM3 length | LM3 | mm | 5~5.9 |
| PM4 length | LM4 | mm | 6~7.9 |
| PM5 length | LM5 | mm | 3~4.4 |
| PM1 width | DM1 | mm | 1.4~2 |
| PM2 width | DM2 | mm | 1.4~1.6 |
| PM3 width | DM3 | mm | 2~3 |
| PM4 width | DM4 | mm | 2~3 |
| Flux barrier1 width | DB1 | mm | 1~1.5 |
| Flux barrier2 width | DB2 | mm | 1~1.5 |
| Flux barrier3 width | DB3 | mm | 1~1.2 |
| Flux barrier4 width | DB4 | mm | 0.5~2 |
| Name | Item | Unit | Value |
|---|---|---|---|
| PM1 length | LM1 | mm | 5.5 |
| PM2 length | LM2 | mm | 2.5 |
| PM3 length | LM3 | mm | 5 |
| PM4 length | LM4 | mm | 7.9 |
| PM5 length | LM5 | mm | 4.4 |
| PM1 width | DM1 | mm | 1.4 |
| PM2 width | DM2 | mm | 1.4 |
| PM3 width | DM3 | mm | 2 |
| PM4 width | DM4 | mm | 2 |
| Flux barrier1 width | DB1 | mm | 1.5 |
| Flux barrier2 width | DB2 | mm | 1 |
| Flux barrier3 width | DB3 | mm | 1.2 |
| Flux barrier4 width | DB4 | mm | 0.5 |
| Item | Unit | Value |
|---|---|---|
| Back EMF (RMS) | V | 256.926 |
| Air gap flux density (RMS) | T | 0.585 |
| Average torque | N·m | 56.854 |
| Torque ripple | % | 29.932 |
| Power | W | 9473.31 |
| Total loss | W | 508.87 |
| Efficiency | % | 94.63 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Xing, F.; Kang, L.; Qin, C. Design and Multi-Objective Optimization for Improving Torque Performance of a Permanent Magnet-Assisted Synchronous Reluctance Motor. Appl. Sci. 2024, 14, 5253. https://doi.org/10.3390/app14125253
Zhang J, Xing F, Kang L, Qin C. Design and Multi-Objective Optimization for Improving Torque Performance of a Permanent Magnet-Assisted Synchronous Reluctance Motor. Applied Sciences. 2024; 14(12):5253. https://doi.org/10.3390/app14125253
Chicago/Turabian StyleZhang, Jiajia, Feng Xing, Lipeng Kang, and Caiyan Qin. 2024. "Design and Multi-Objective Optimization for Improving Torque Performance of a Permanent Magnet-Assisted Synchronous Reluctance Motor" Applied Sciences 14, no. 12: 5253. https://doi.org/10.3390/app14125253
APA StyleZhang, J., Xing, F., Kang, L., & Qin, C. (2024). Design and Multi-Objective Optimization for Improving Torque Performance of a Permanent Magnet-Assisted Synchronous Reluctance Motor. Applied Sciences, 14(12), 5253. https://doi.org/10.3390/app14125253