
Seismic Stability Study of Bedding Slope Based on a Pseudo-Dynamic Method and Its Numerical Validation


Abstract
:1. Introduction
2. Pseudo-Dynamic Analysis Method of Bedding Slope Stability
2.1. Pseudo-Dynamic Method
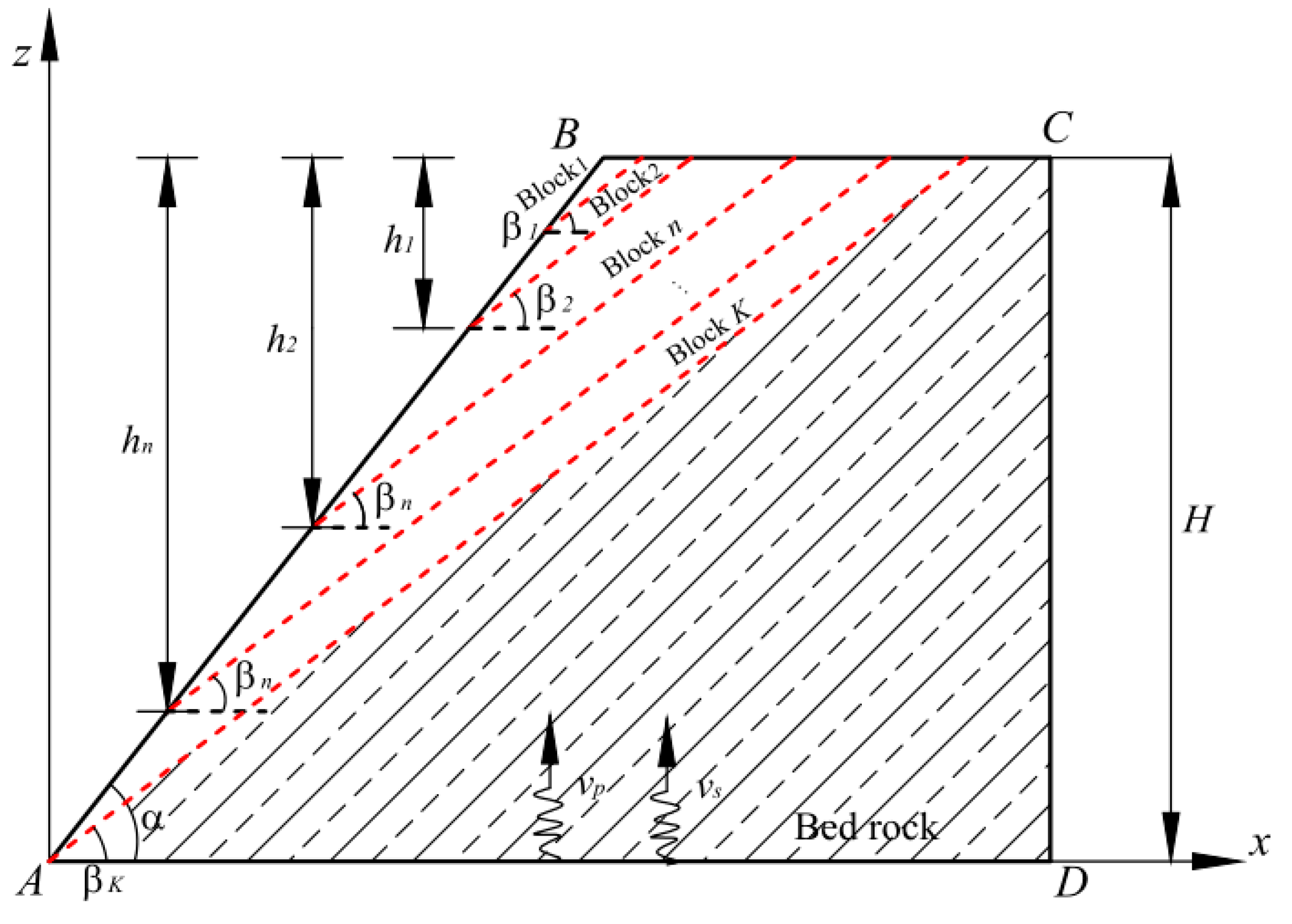
2.2. Simplified Mechanical Model
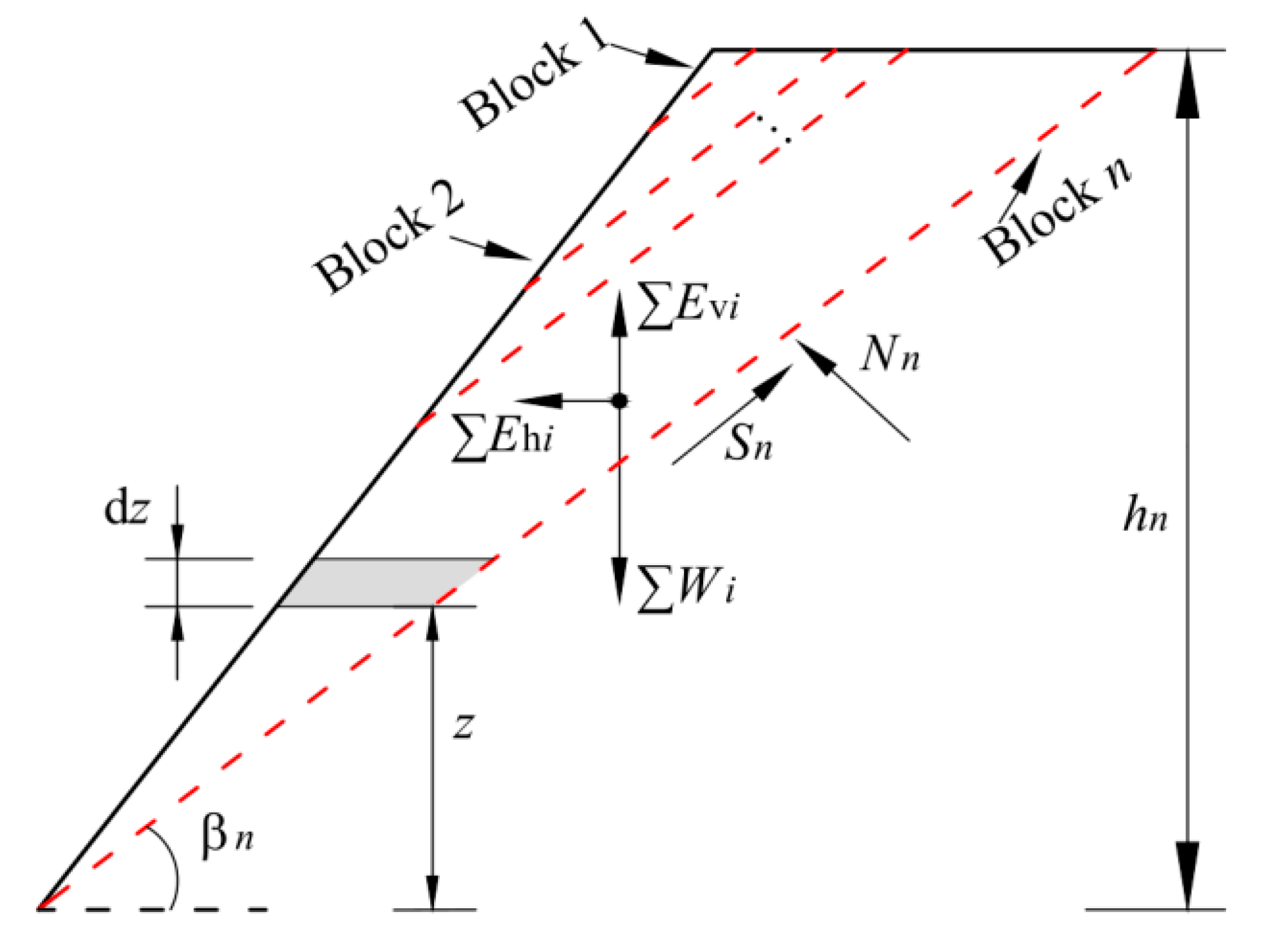
2.3. Determination of Forces of Slip Block
2.3.1. Determination of Weight Force of Slip Block
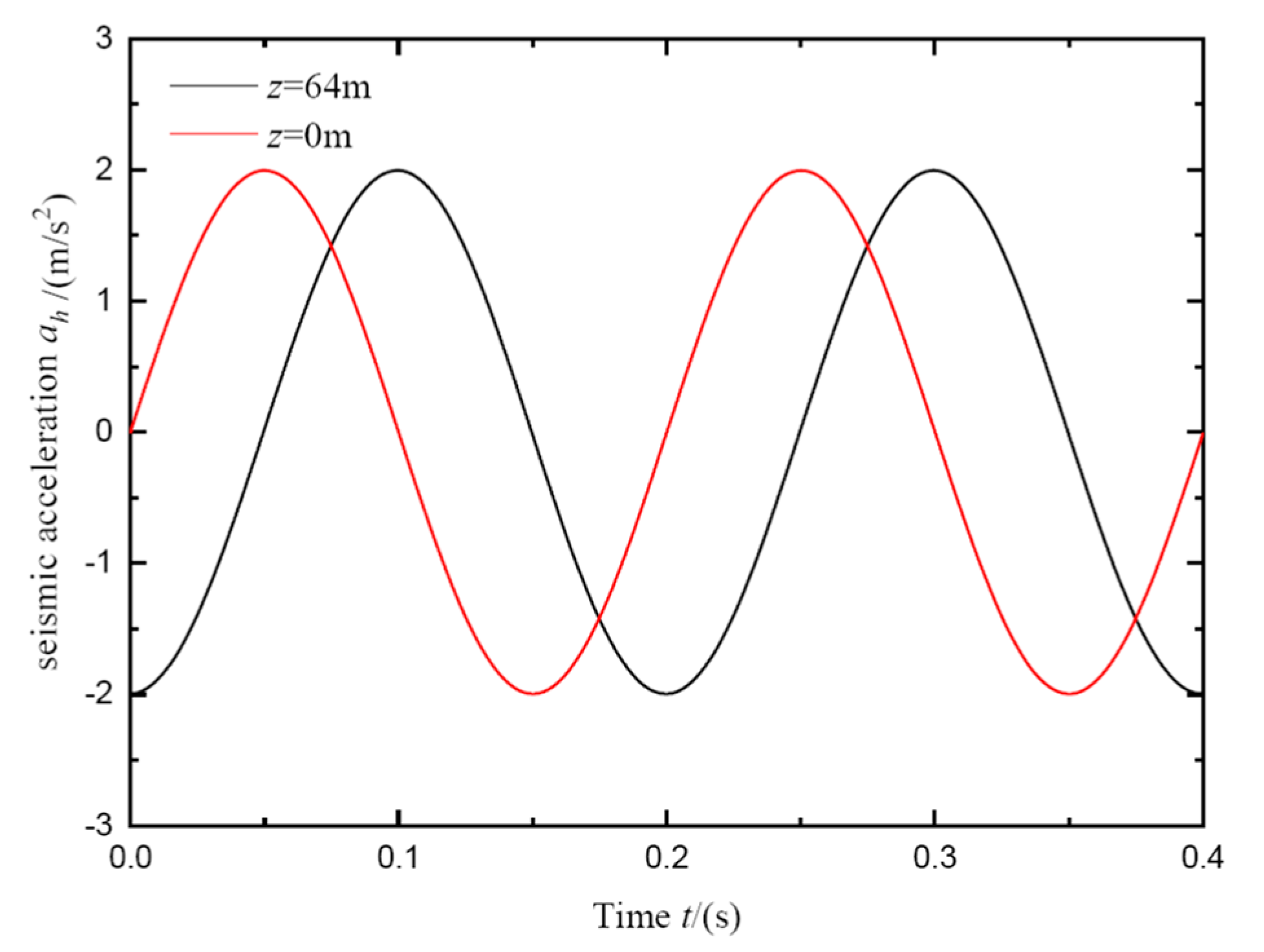
2.3.2. Determination of Horizontal Seismic Inertia Force of Slip Block
2.4. Safety Factor Calculation of Bedding Slope
3. Results Analysis of Pseudo-Dynamic Method
3.1. Validation of the Present Method
3.2. Dynamic Characteristics of Bedding Slope
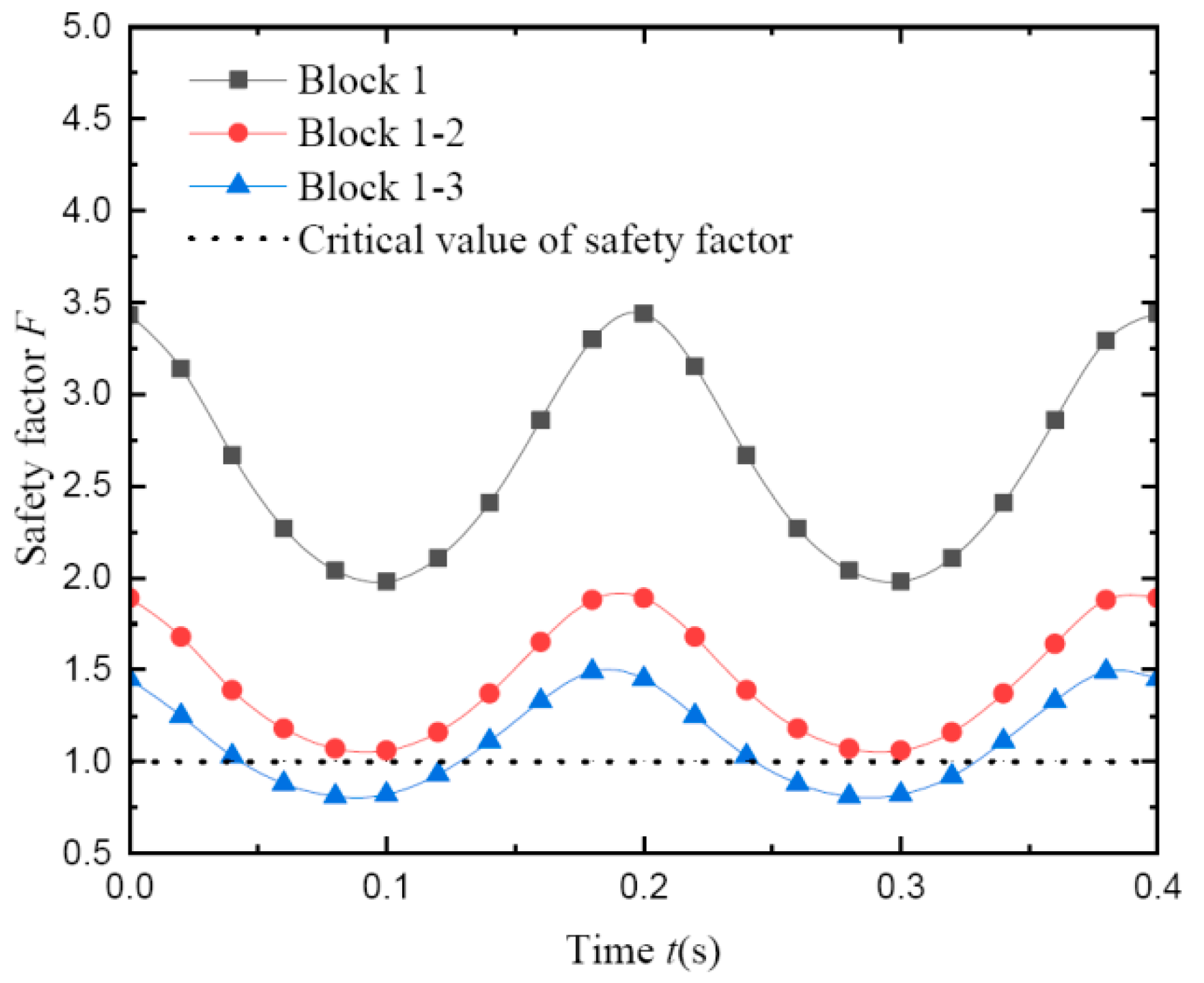
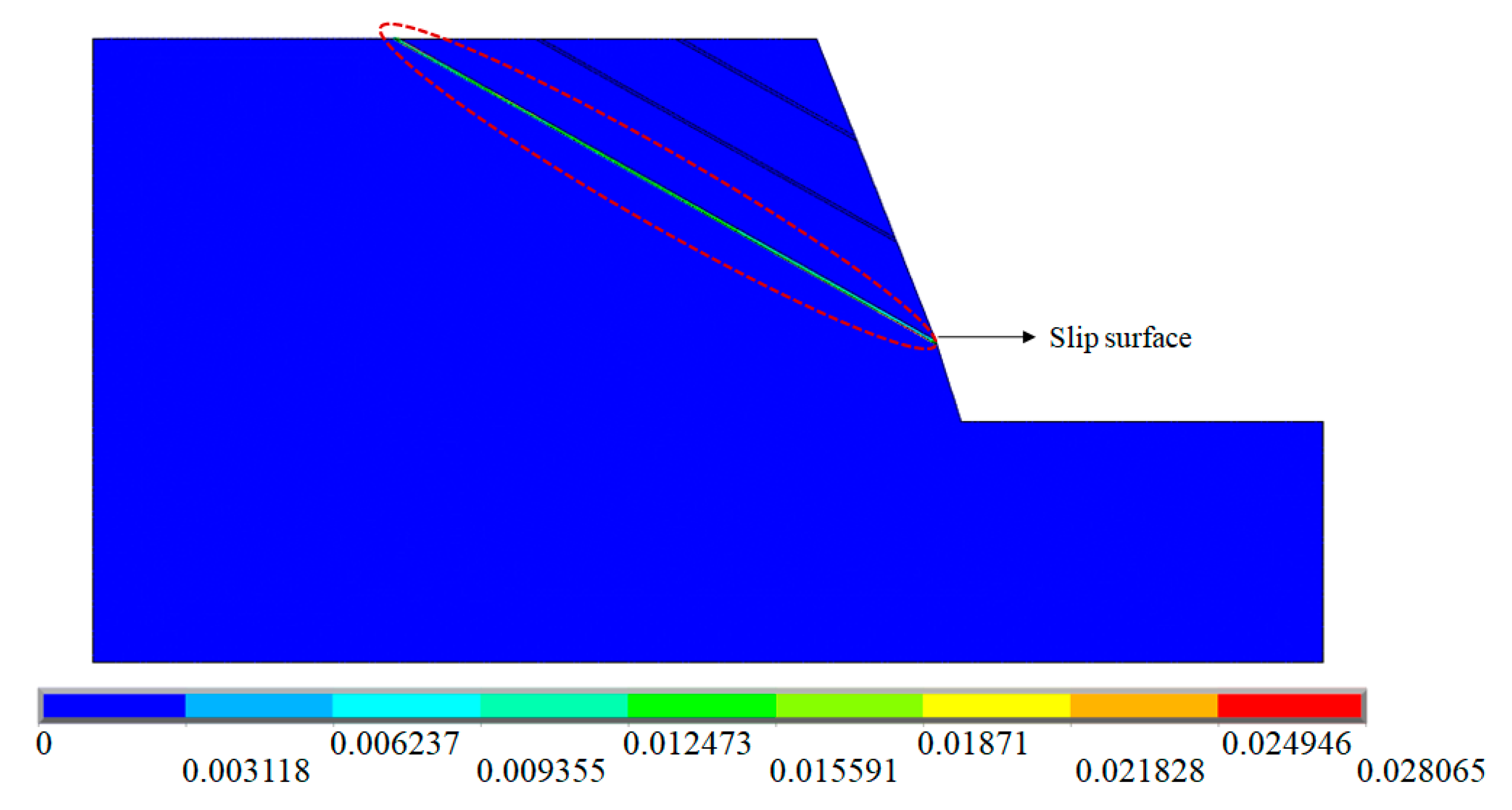
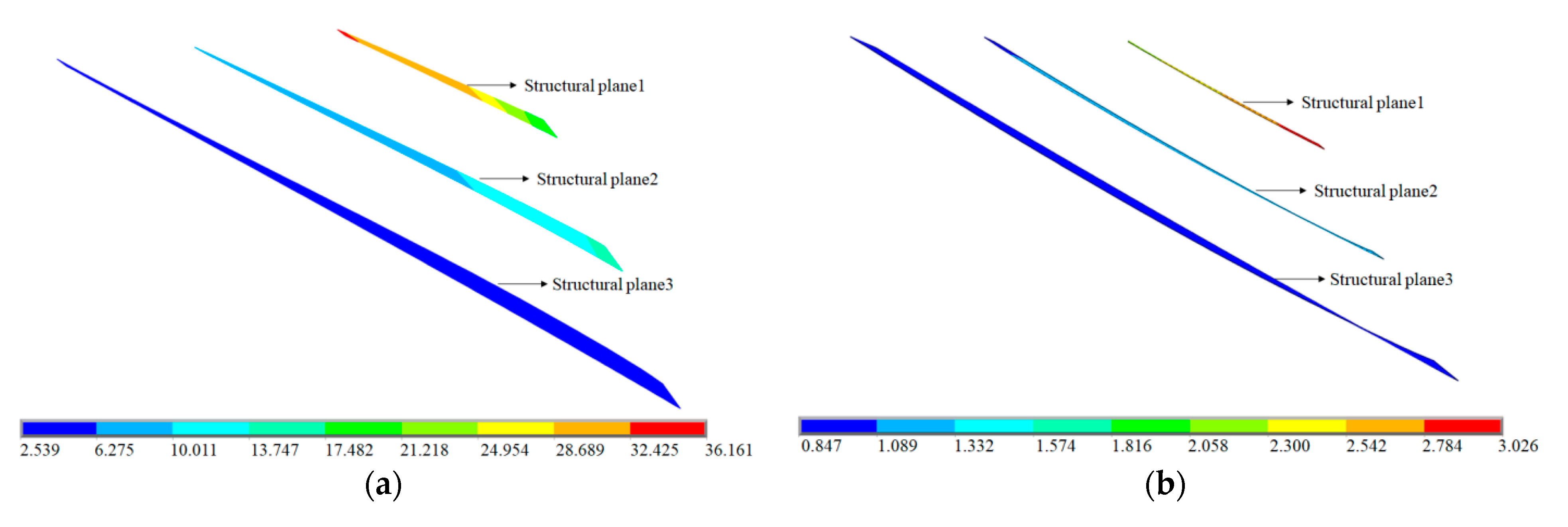
3.2.1. Determination of Slip Surface
3.2.2. The Effects of Various Parameters on Safety Factor
- The effects of dynamic parameters of the seismic action on safety factor
- (1)
- The effects of computing time t on safety factor
- (2)
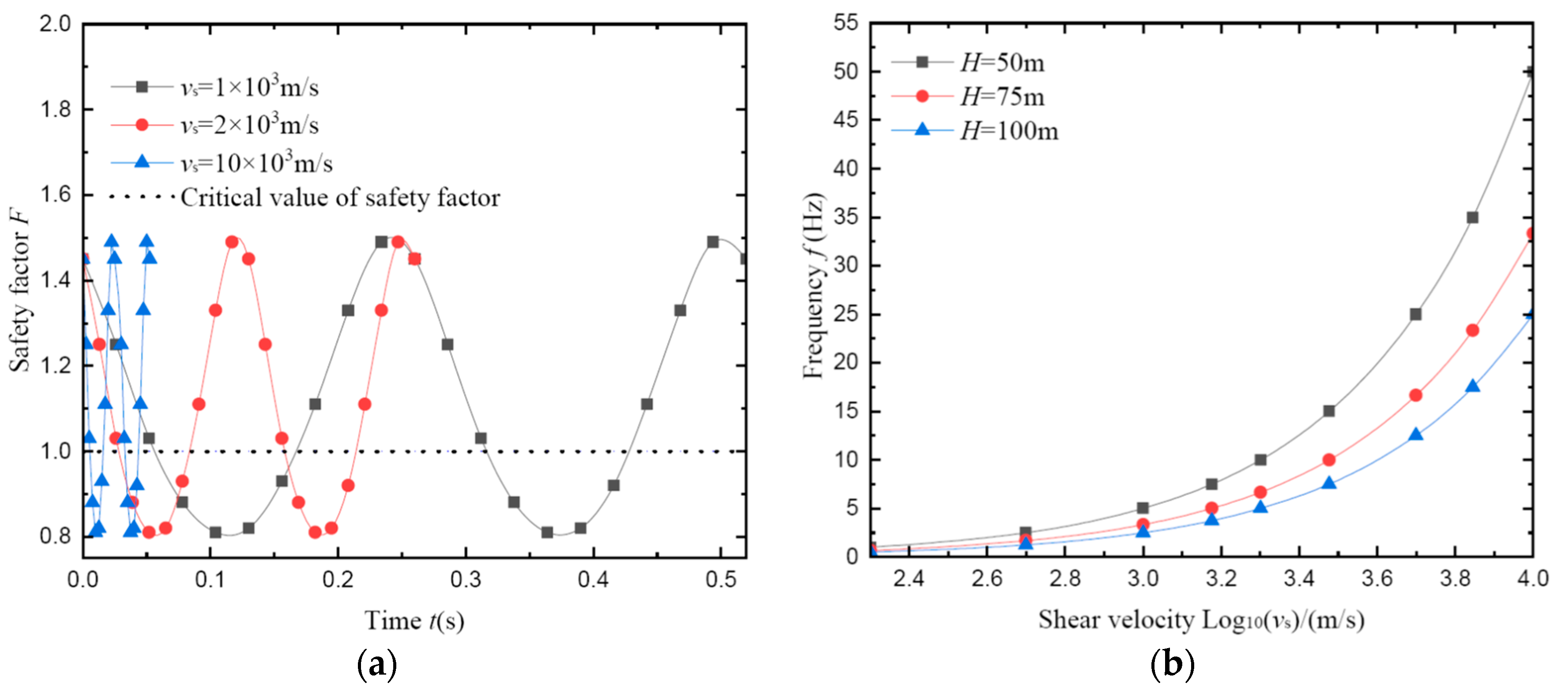
- The effects of input wave velocity vs on safety factor
- (3)
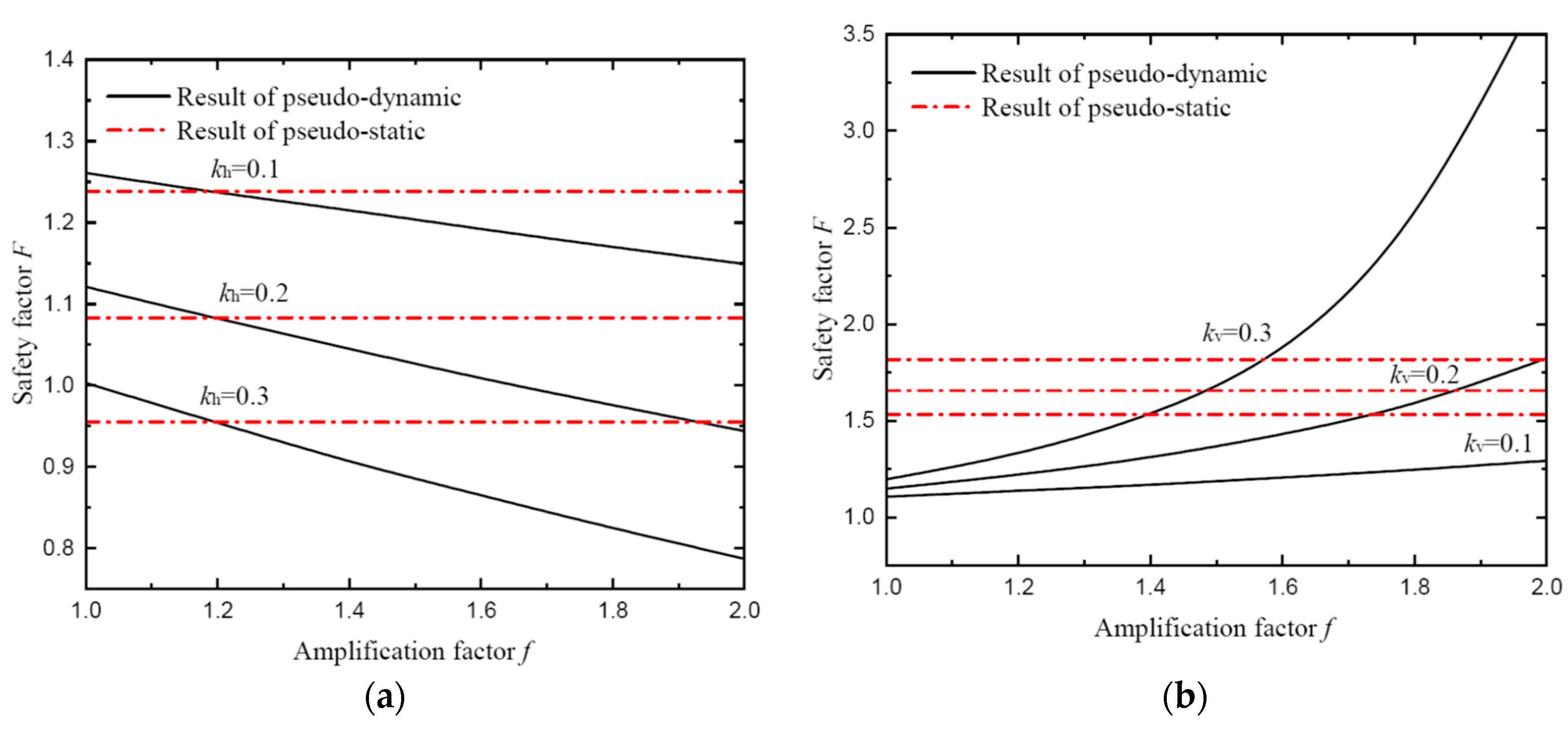
- The effects of seismic acceleration coefficients kh and kv on safety factor
- (4)
- The effects of amplification factor f on safety factor
- 2.
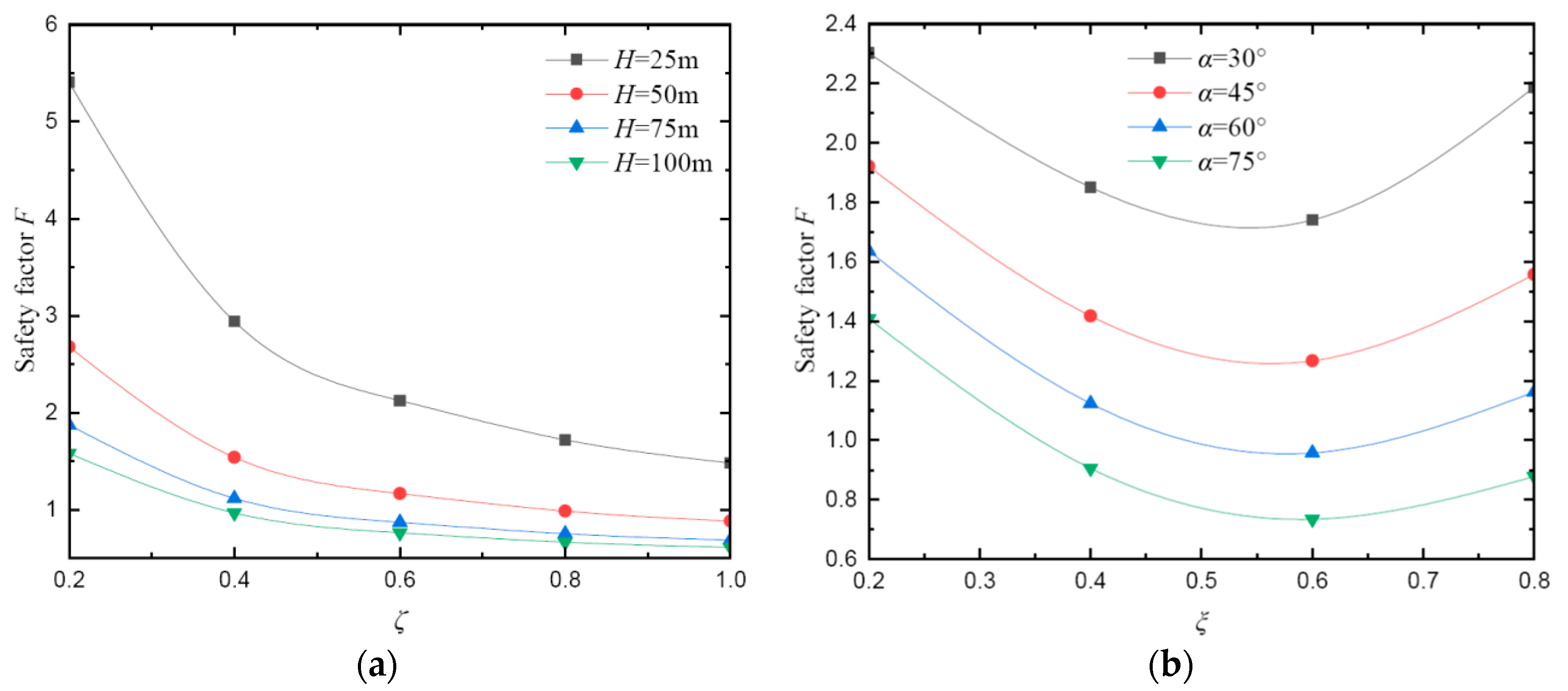
- The effects ofgeometrical parameters of slope on safety factor
- 3.
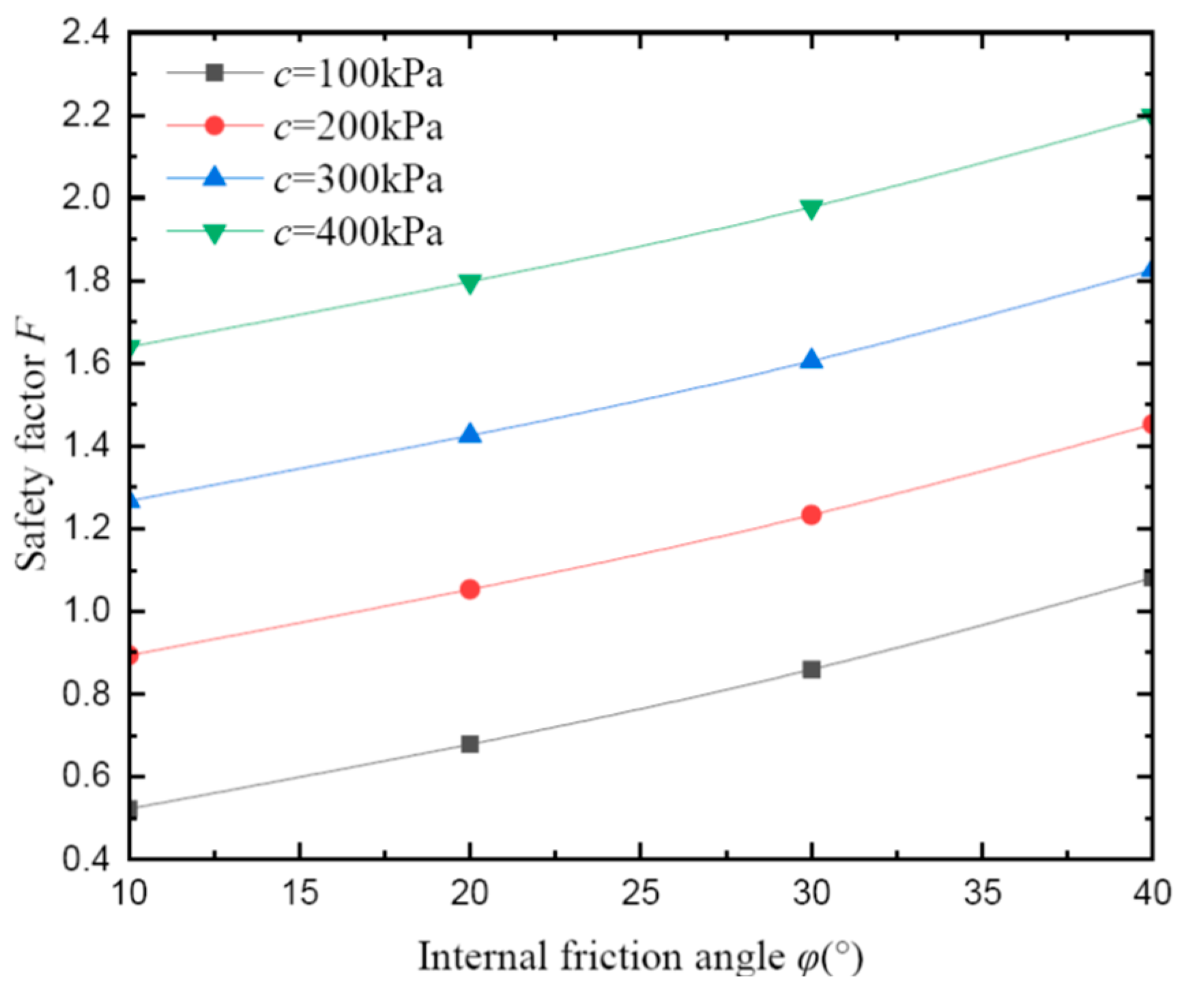
- The effects of strength parameters of slope on safety factor
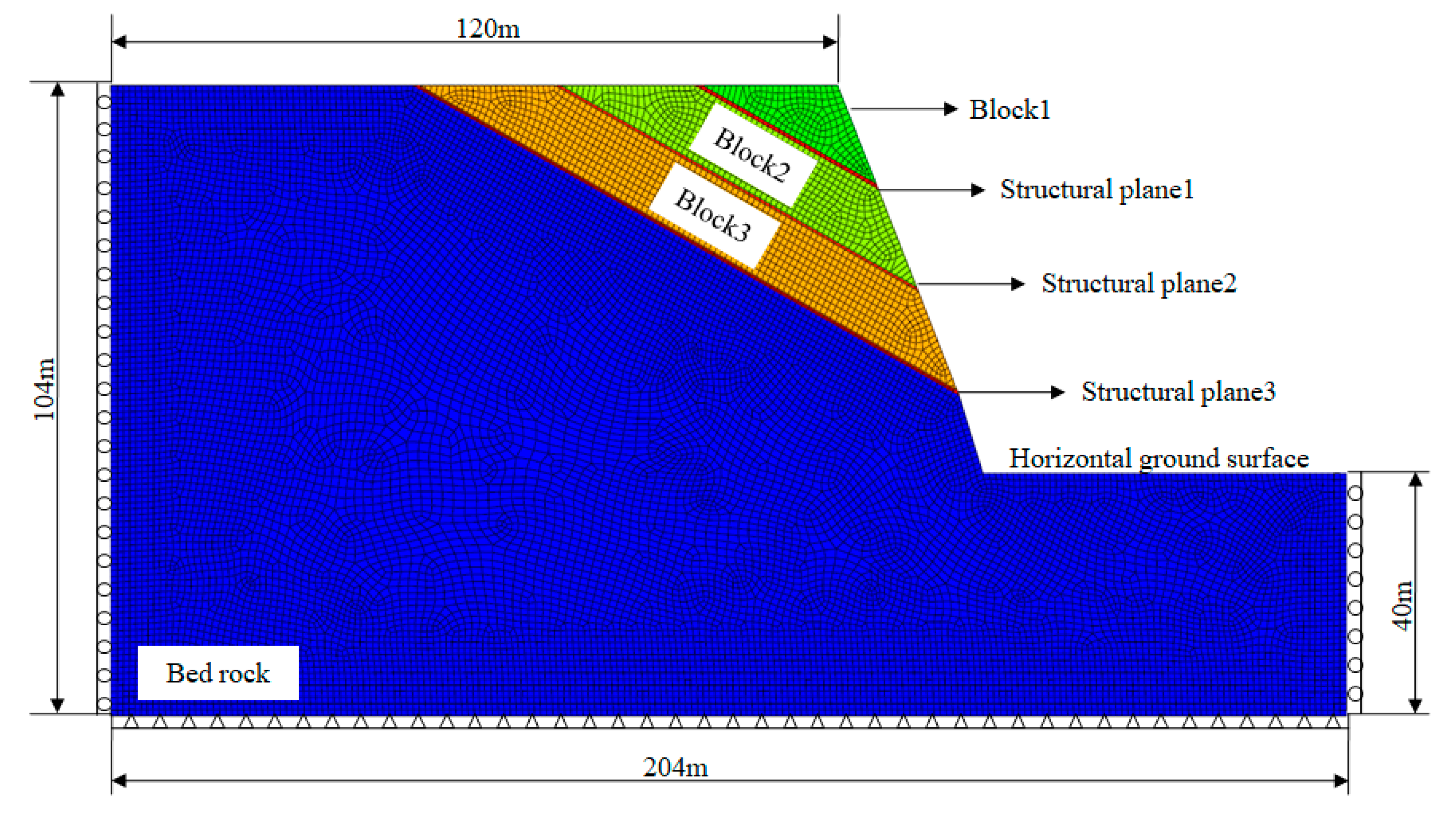
4. Numerical Analysis of Pseudo-Dynamic Method
5. Discussion
6. Conclusions
- (1)
- The slip surface of a bedding slope is the structural plane closest to the slope toe, and this conclusion has been confirmed by the pseudo-dynamic method and numerical simulation in this study. It has a great theoretical significance for understanding the slip mechanism of bedding slopes.
- (2)
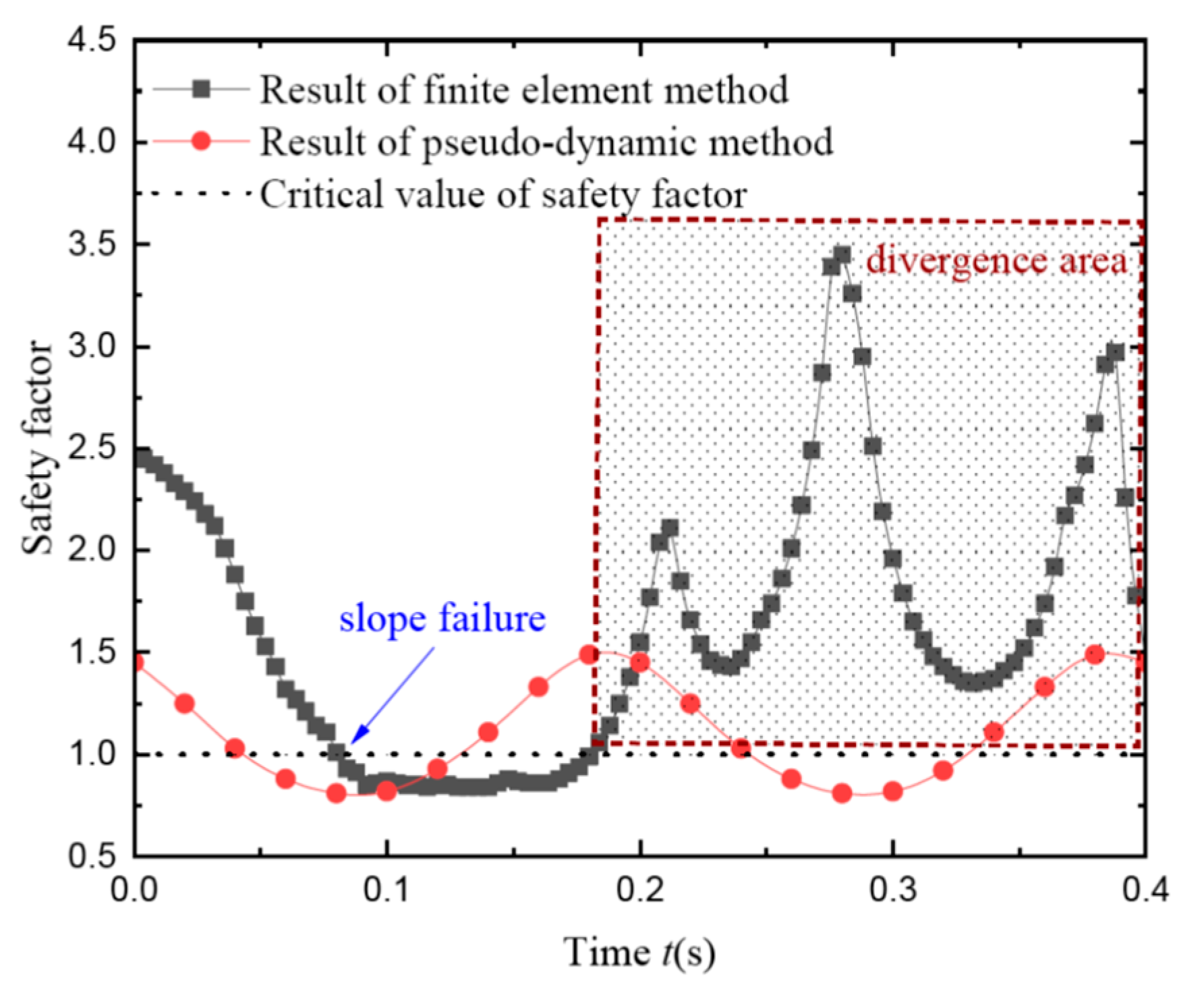
- The safety factor obtained by the pseudo-dynamic method shows an apparent periodical characteristic with time. Hence, the minimum transient safety factor is defined as the dynamic safety factor under the seismic load. Without offering enough consideration of practical deformation, the pseudo-dynamic method makes the safety factor overly conservative.
- (3)
- The influences of slope parameters on the safety factor include both that the safety factor increases linearly with an increase in the internal friction angle and cohesion, but decreases with the increase in both slope angle and slope height; and that there seems to be an optimal value corresponding to the minimum safety factor for the structural plane angle and slope angle, and the ratio is approximately 0.5~0.6.
- (4)
- The influences of seismic parameters on the safety factor include the following: the influences of seismic acceleration coefficients on the safety factor are mainly shown by vibration time and direction, and the influence efficiency of kh on the safety factor is significantly greater than kv; the effect of the seismic amplification coefficient on the safety factor is different at different vibration times, and it can effectively simulate the seismic inertia force at different positions compared with the pseudo-static method; and the input wave velocity only affects the changing frequency of the safety factor, but has no effect on its extreme value.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, S.B.; Shi, Y.L.; Lu, M.; Xie, F.R. Dynamic mechanisms of earthquake-triggered landslides. Sci. China Earth Sci. 2013, 56, 1769–1779. [Google Scholar] [CrossRef]
- Song, J.; Lu, Z.X.; Pan, Y.H.; Ji, J.; Gao, Y.F. Investigation of seismic displacements in bedding rock slopes by an extended Newmark sliding block model. Landslides 2023, 21, 461–477. [Google Scholar] [CrossRef]
- Zang, M.D.; Yang, G.X.; Dong, J.Y.; Qi, S.W.; He, J.X.; Liang, N. Experimental study on seismic response and progressive failure characteristics of bedding rock slopes. J. Rock. Mech. Geotech. Eng. 2022, 14, 1394–1405. [Google Scholar] [CrossRef]
- Cui, S.H.; Pei, X.J.; Yang, H.L.; Zhu, L.; Jiang, Y.; Zhu, C.; Jiang, T.; Huang, R.Q. Bedding slope damage accumulation induced by multiple earthquakes. Soil Dyn. Earthq. Eng. 2023, 173, 108175. [Google Scholar] [CrossRef]
- Terzaghi, K.; Peek, R.B. Soil Mechanics in Engineering Practice; John Wile: New York, NY, USA, 1948. [Google Scholar]
- Seed, H.B. Considerations in the earthquake-resistant design of earth and rockfill dams. Geotechnique 1979, 29, 215–263. [Google Scholar] [CrossRef]
- Bray, J.D.; Repetto, P.C. Seismic design considerations for lined solid waste landfills. Geotext. Geomembr. 1994, 13, 497–518. [Google Scholar] [CrossRef]
- Shyahi, B.G. Pseudo-static stability analysis in normally consolidated soil slopes subjected to earthquake. Tek. Dergi/Tech. J. Turk. Chamb. Civ. Eng. 1998, 9, 457–461. [Google Scholar]
- Ausilio, E.; Conte, E.; Dente, G. Seismic stability analysis of reinforced slopes. Soil Dyn. Earthq. Eng. 2000, 19, 159–172. [Google Scholar] [CrossRef]
- Deng, D.P.; Li, L.; Zhao, L.H. Research on quasi-static method of slope stability analysis during earthquake. J. Cent. South Univ. 2014, 45, 3578–3588. [Google Scholar]
- Karray, M.; Hussien, M.N.; Delisle, M.C.; Ledoux, C. Framework to assess pseudo-static approach for seismic stability of clayey slopes. Can. Geotech. J. 2018, 55, 1860–1878. [Google Scholar] [CrossRef]
- Ye, S.H.; Zhang, R.H. Stability analysis of multistage loess slope under earthquake action based on the pseudo-static method. Soil Mech. Found. Eng. 2023, 60, 304–313. [Google Scholar] [CrossRef]
- Steedman, R.S.; Zeng, X. The influence of phase on the calculated of pseudo-static earth pressure on a retaining wall. Geotechnique 1990, 40, 103–112. [Google Scholar] [CrossRef]
- Basha, B.M.; Babu, G.L.S. Seismic rotational displacements of gravity walls by pseudo dynamic method with curved rupture surface. Int. J. Geomech. 2010, 10, 93–105. [Google Scholar] [CrossRef]
- Choudhuary, D.; Nimbalkar, S. Pseudo-dynamic approach of seismic active earth pressure behind retaining wall. Geotech. Geol. Eng. 2006, 24, 1103–1113. [Google Scholar] [CrossRef]
- Choudhuary, D.; Nimbalkar, S. Seismic stability of tailings dam by using pseudo-dynamic method. In Proceedings of the ICSMGE—The 17th International Conference on Soil Mechanics and Geotechnical Engineering, Alexandria, Egypt, 5–9 October 2009; IOS Press: Amsterdam, The Netherlands, 2009; pp. 1542–1545. [Google Scholar]
- Lu, Y.L.; Chen, X.R.; Wang, L. Analytical computation of sand slope stability under the groundwater seepage and earthquake conditions. Adv. Civ. Eng. 2022, 2022, 5286878. [Google Scholar]
- Zhou, J.F.; Qin, C.B. Finite-element upper-bound analysis of seismic slope stability considering pseudo-dynamic approach. Comput. Geotech. 2020, 122, 103530. [Google Scholar] [CrossRef]
- Zhou, J.F.; Zheng, Z.Y.; Bao, T.; Tu, B.X.; Yu, J.; Qin, C.B. Assessment of rigorous solutions for pseudo-dynamic slope stability: Finite-element limit-analysis modelling. J. Cent. South Univ. 2023, 30, 2374–2391. [Google Scholar] [CrossRef]
- Kokane, A.K.; Sawant, V.A.; Sahoo, J.P. Seismic stability analysis of nailed vertical cut using modified pseudo-dynamic method. Soil Dyn. Earthq. Eng. 2020, 137, 106294. [Google Scholar] [CrossRef]
- Suman, H.; Sima, G.; Richi, P.S. New pseudo-dynamic analysis of two-layered cohesive-friction soil slope and its numerical validation. Front. Struct. Civ. Eng. 2020, 14, 1492–1508. [Google Scholar]
- Griffiths, D.V.; Lane, P.A. Slope stability analysis by finite elements. Geotechnique 1999, 49, 387–403. [Google Scholar] [CrossRef]
- Duncan, J.M. State of the art: Limit equilibrium and finite-element analysis of slopes. J. Geotech. Geoenviron. Eng. 1996, 122, 577–596. [Google Scholar] [CrossRef]
- Matsui, T.; San, K.C. Finite element slope stability analysis by shear strength reduction technique. Soils Found. 1992, 32, 59–70. [Google Scholar] [CrossRef]
- Zheng, H.; Liu, D.F.; Li, C.G. Slope stability analysis based on elasto-plastic finite element method. Int. J. Numer. Meth. Eng. 2005, 64, 1871–1888. [Google Scholar] [CrossRef]
- Zheng, H.; Tham, L.G.; Liu, D.F. On two definitions of the factor of safety commonly used in the finite element slope stability analysis. Comput. Geotech. 2006, 33, 188–195. [Google Scholar] [CrossRef]
- Qin, C.B.; Zhou, J.F. On the seismic stability of soil slopes containing dual weak layers: True failure load assessment by finite-element limit-analysis. Acta Geotech. 2023, 18, 1–23. [Google Scholar]
- Karthik, A.V.R.; Manideep, R.; Chavda, J.T. Sensitivity analysis of slope stability using finite element method. Innov. Infrastruct. Solut. 2022, 7, 184. [Google Scholar] [CrossRef]
- Liu, S.Y.; Su, Z.N.; Li, M.; Shao, L.T. Slope stability analysis using elastic finite element stress fields. Eng. Geol. 2020, 273, 105673. [Google Scholar] [CrossRef]
- Tomáš, K.; David, M. Surface layer method for analysis of slope stability using finite elements. Comput. Geotech. 2023, 164, 105799. [Google Scholar]
- Das, B.M. Principles of Soil Dynamics; PWS-KENT Publishing Company: Boston, MA, USA, 1993. [Google Scholar]
- Dong, Z.X. Digital Dynamic Prediction of Rock Slope Stability; Geological Publishing House: Beijing, China, 2010. [Google Scholar]
- Zhao, S.Y.; Zheng, Y.R.; Deng, W.D. Stability analysis on jointed rock slope by strength reduction FEM. Chin. J. Rock. Mech. Eng. 2003, 22, 254–260. [Google Scholar]
- Jing, P.X.; Yin, C.; Men, L.J.; Xu, J.F.; Yang, Q.Y. Dynamic response analysis of rock slope based on viscoelastic artificial boundary condition. J. Water Resour. Archit. Eng. 2021, 19, 190–194. [Google Scholar]
- Lu, Y.L.; Bo, J.S.; Chen, X.R.; Wang, L. Slope stability evaluation based on the weight of sliding inclination angle. Water Power 2017, 43, 33–36. [Google Scholar]
- Seed, H.B. Stability of earth and rockfill dams during earthquake. In Embankment-Dam Engineering (Casagrand Volume); John Wiley and Sons, Inc.: New York, NY, USA, 1973; pp. 239–269. [Google Scholar]
- Li, S.H.; Xiao, S.G. A displacement-dependent limit-equilibrium slice method for slope stability analysis. Int. J. Geomech. 2023, 23, 06023009. [Google Scholar] [CrossRef]
- Xiao, S.G.; Guo, W.D.; Zeng, J.X. Factor of safety of slope stability from deformation energy. Can. Geotech. J. 2018, 55, 296–302. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Result | Method | ||||
|---|---|---|---|---|---|
| Present | Simplified Janbu | Imbalance Thrust Force | Strength Reduction | Finite Element Slip Surface Stress | |
| Safety factor | 1.56 | 1.65 | 1.65 | 1.55 | 1.38 |
| Error (%) | / | −5.45 | −5.45 | 0.65 | 11.54 |
| Result | Method | |||
|---|---|---|---|---|
| Present | Pseudo-Static | Minimum Stability Factor | Dynamic Time-History Analysis | |
| Safety factor | 1.12 | 1.12 | 0.99 | 1.05 |
| Error (%) | / | 0 | 13.13 | 6.67 |
| Material | Unit Weight γ (kN·m−3) | Elastic Modulus E/Pa | Poisson’s Ratio μ | Cohesion c/kPa | Internal Friction Angle φ/(°) |
|---|---|---|---|---|---|
| rock mass | 25 | 1 × 1010 | 0.20 | 1000 | 38 |
| structural plane | 17 | 1 × 107 | 0.30 | 120 | 24 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Y.; Jing, Y.; He, J.; Zhang, X.; Chen, X. Seismic Stability Study of Bedding Slope Based on a Pseudo-Dynamic Method and Its Numerical Validation. Appl. Sci. 2024, 14, 5804. https://doi.org/10.3390/app14135804
Lu Y, Jing Y, He J, Zhang X, Chen X. Seismic Stability Study of Bedding Slope Based on a Pseudo-Dynamic Method and Its Numerical Validation. Applied Sciences. 2024; 14(13):5804. https://doi.org/10.3390/app14135804
Chicago/Turabian StyleLu, Yulin, Yinuo Jing, Jinze He, Xingxing Zhang, and Xiaoran Chen. 2024. "Seismic Stability Study of Bedding Slope Based on a Pseudo-Dynamic Method and Its Numerical Validation" Applied Sciences 14, no. 13: 5804. https://doi.org/10.3390/app14135804