
Numerical Investigation of Bedding Rock Slope Potential Failure Modes and Triggering Factors: A Case Study of a Bridge Anchorage Excavated Foundation Pit Slope

Abstract
:1. Introduction
2. Background of the Rock Slope
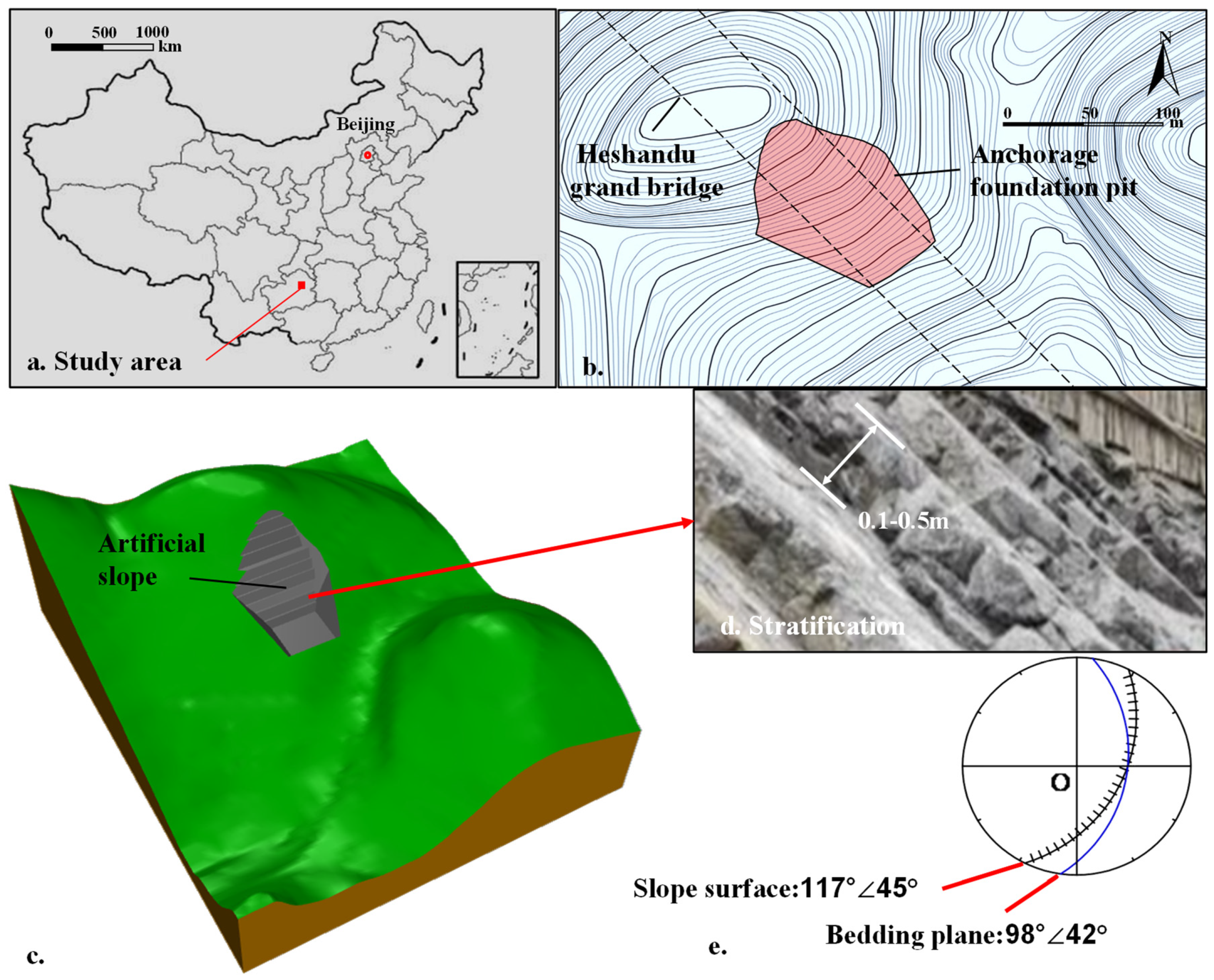
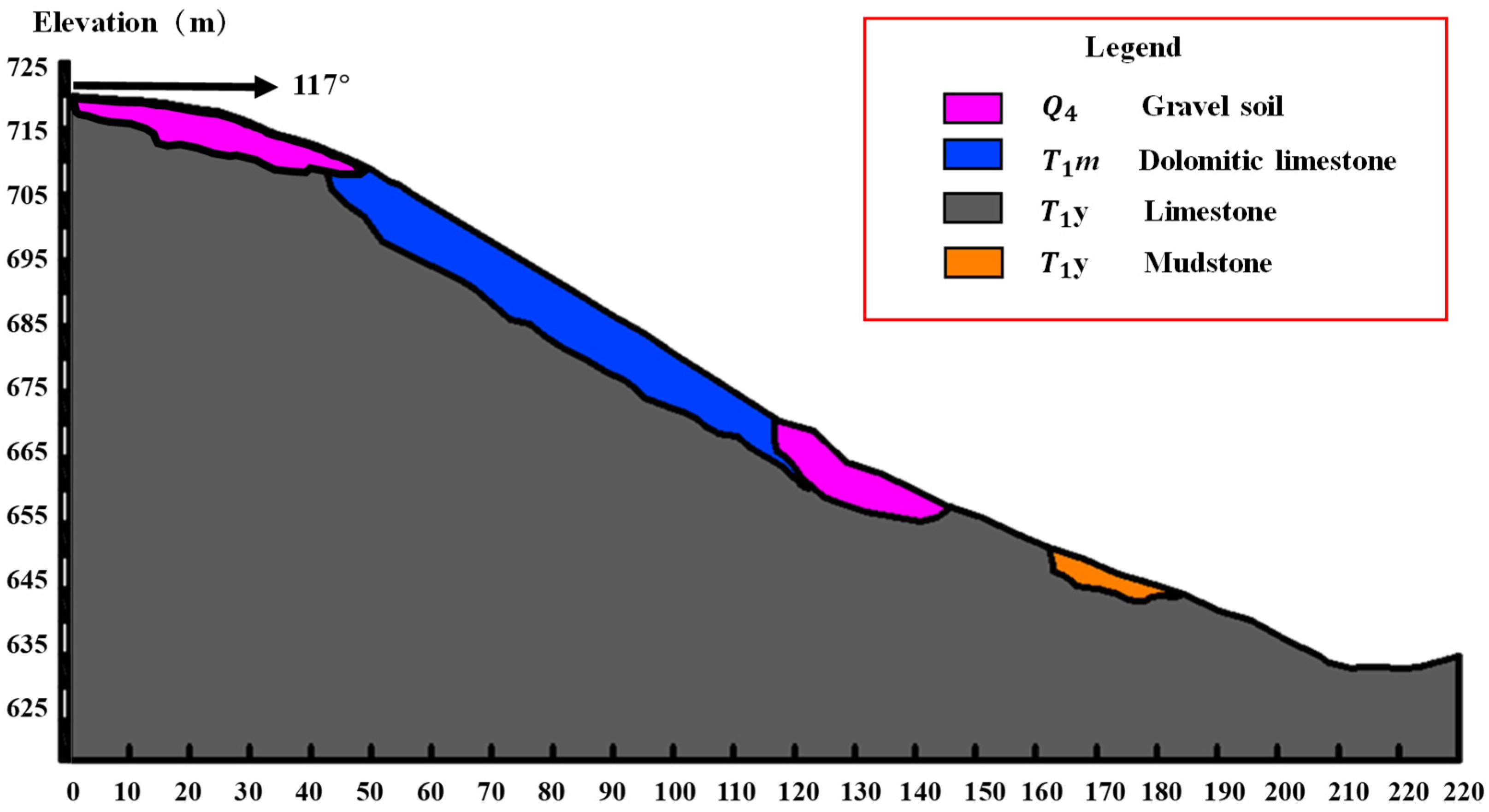
2.1. Geological Setting, Climate and Earthquake
2.2. Engineering Overview
3. Methodology
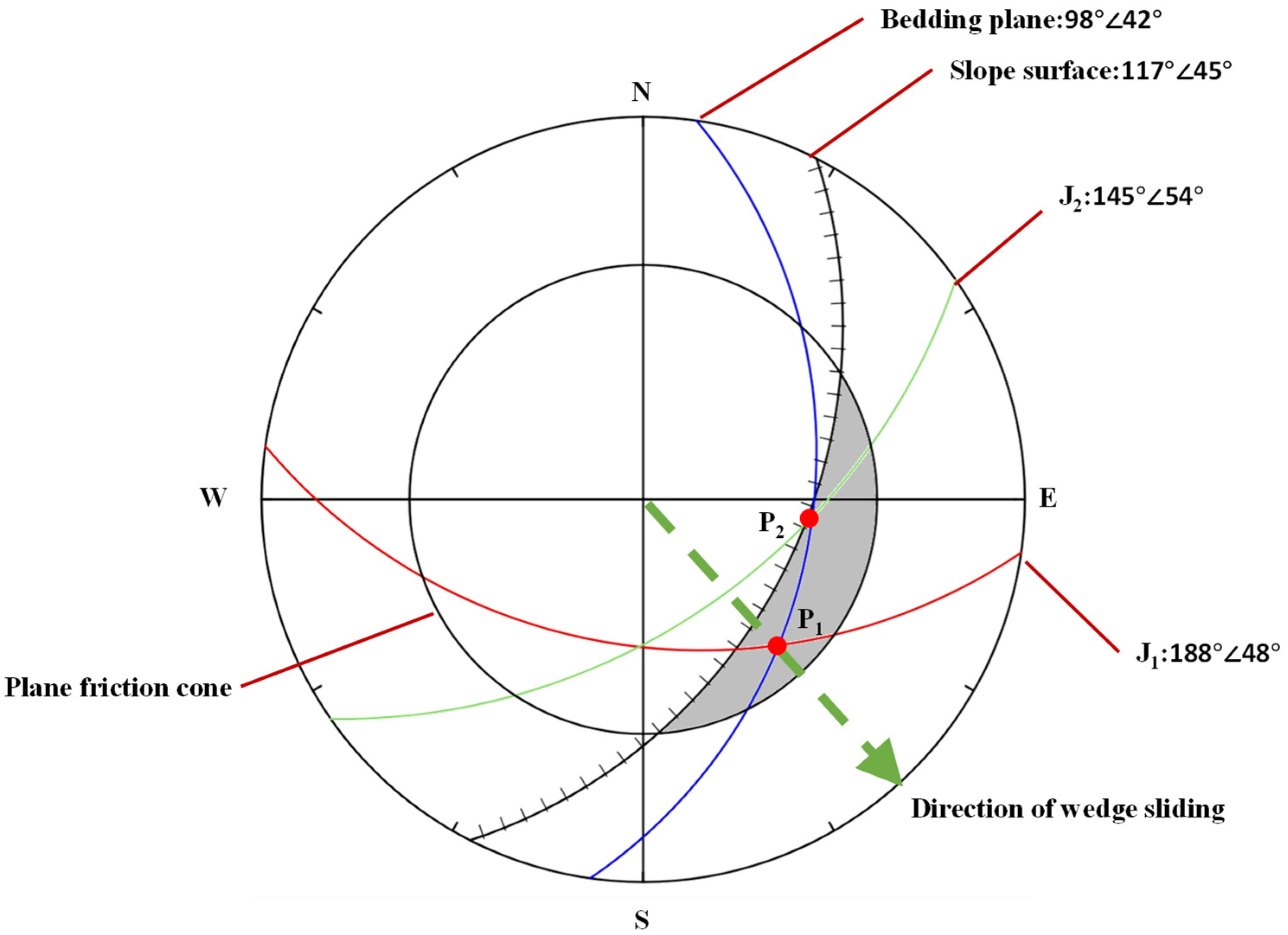
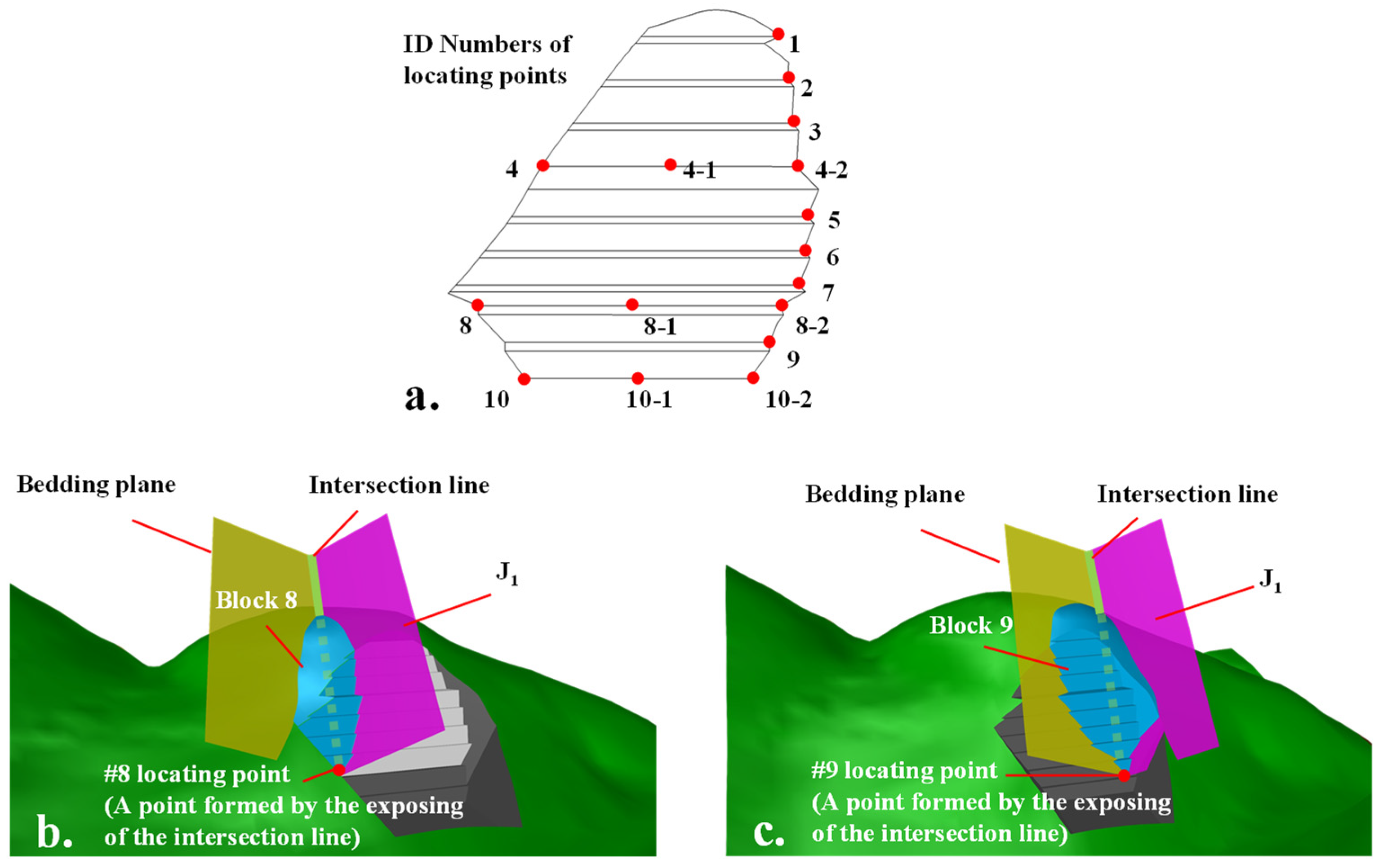
3.1. Detection of Potential Sliding Surface
3.2. Numerical Evaluation
3.2.1. Constitutive Model and Material Parameters
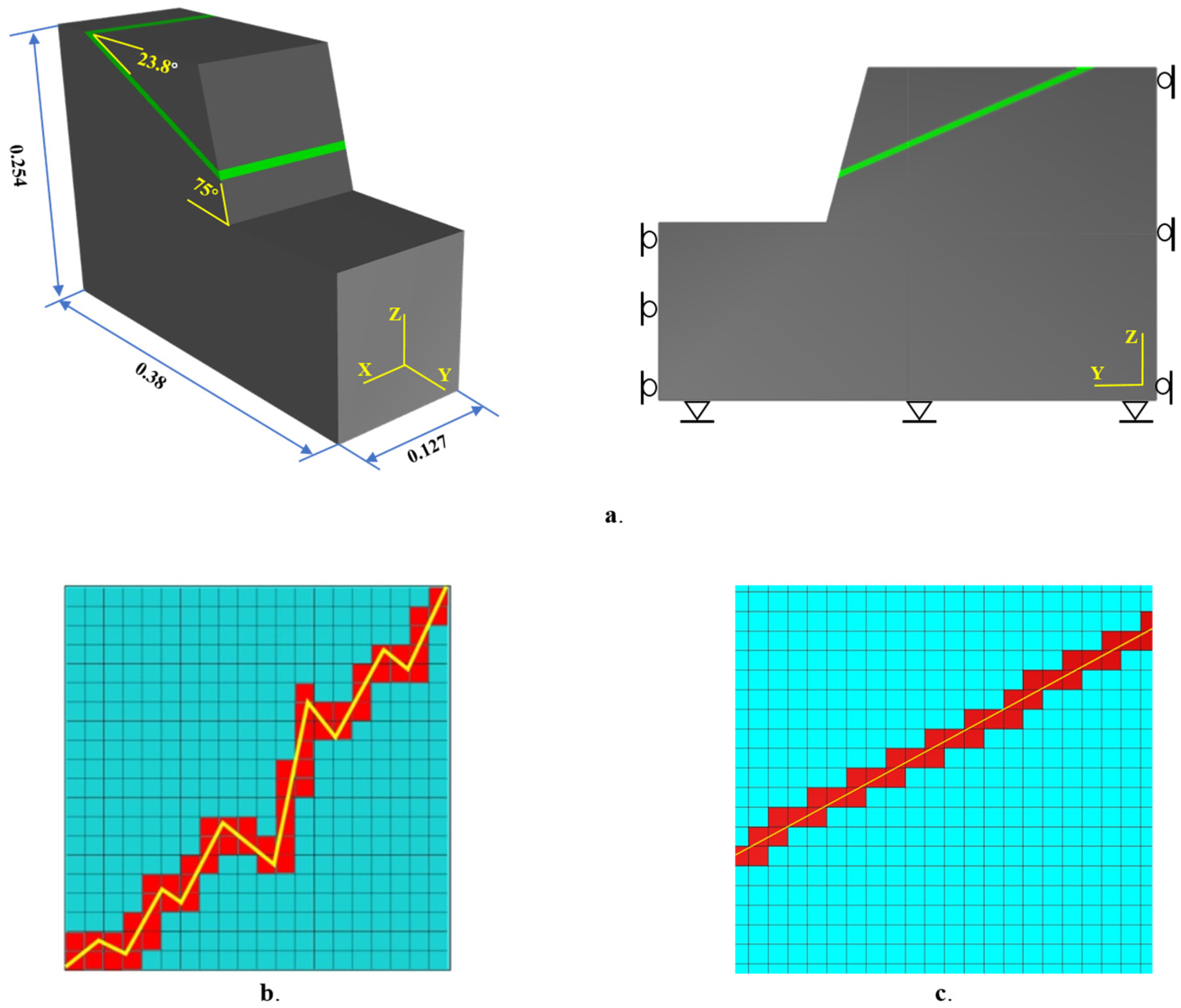
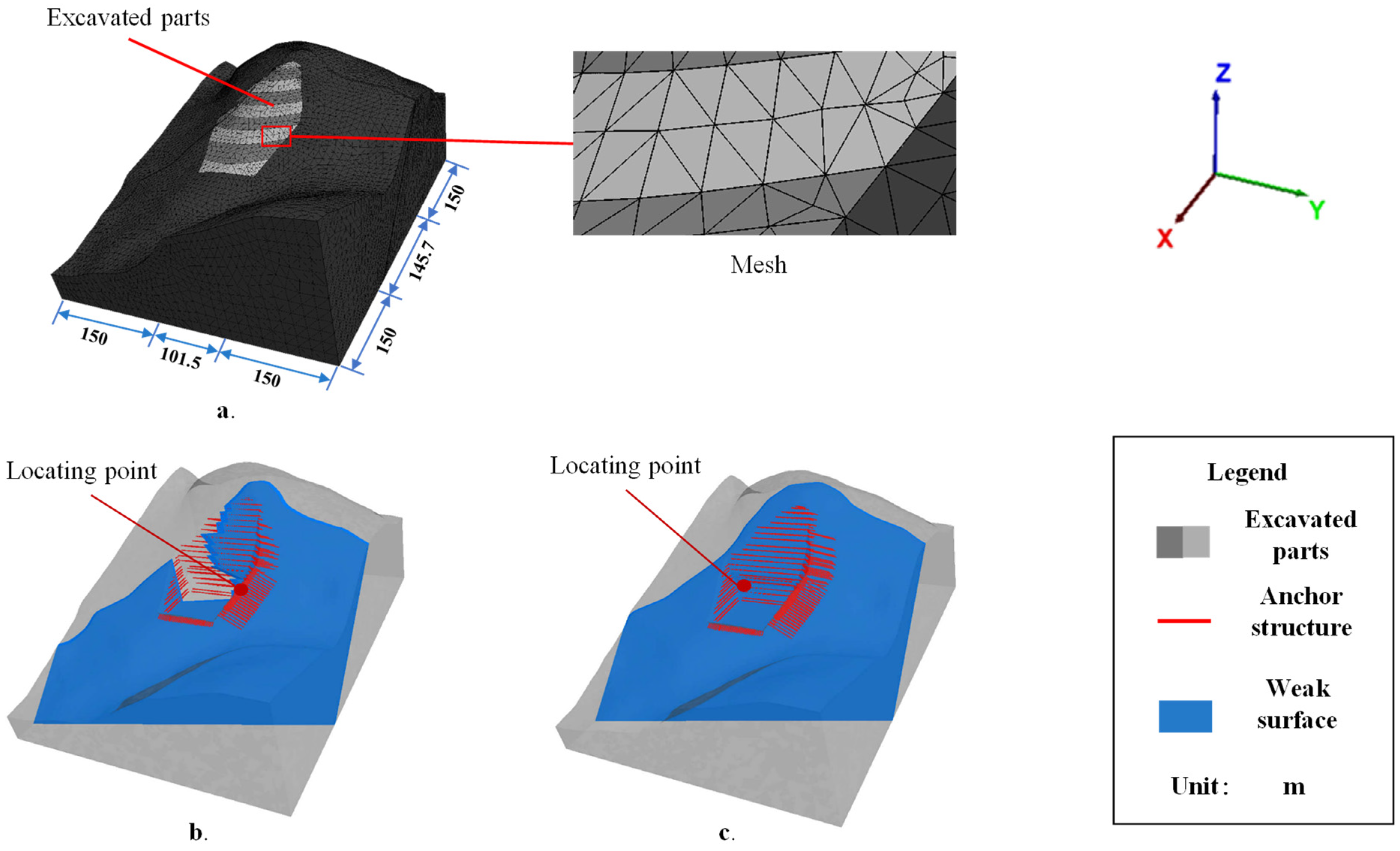
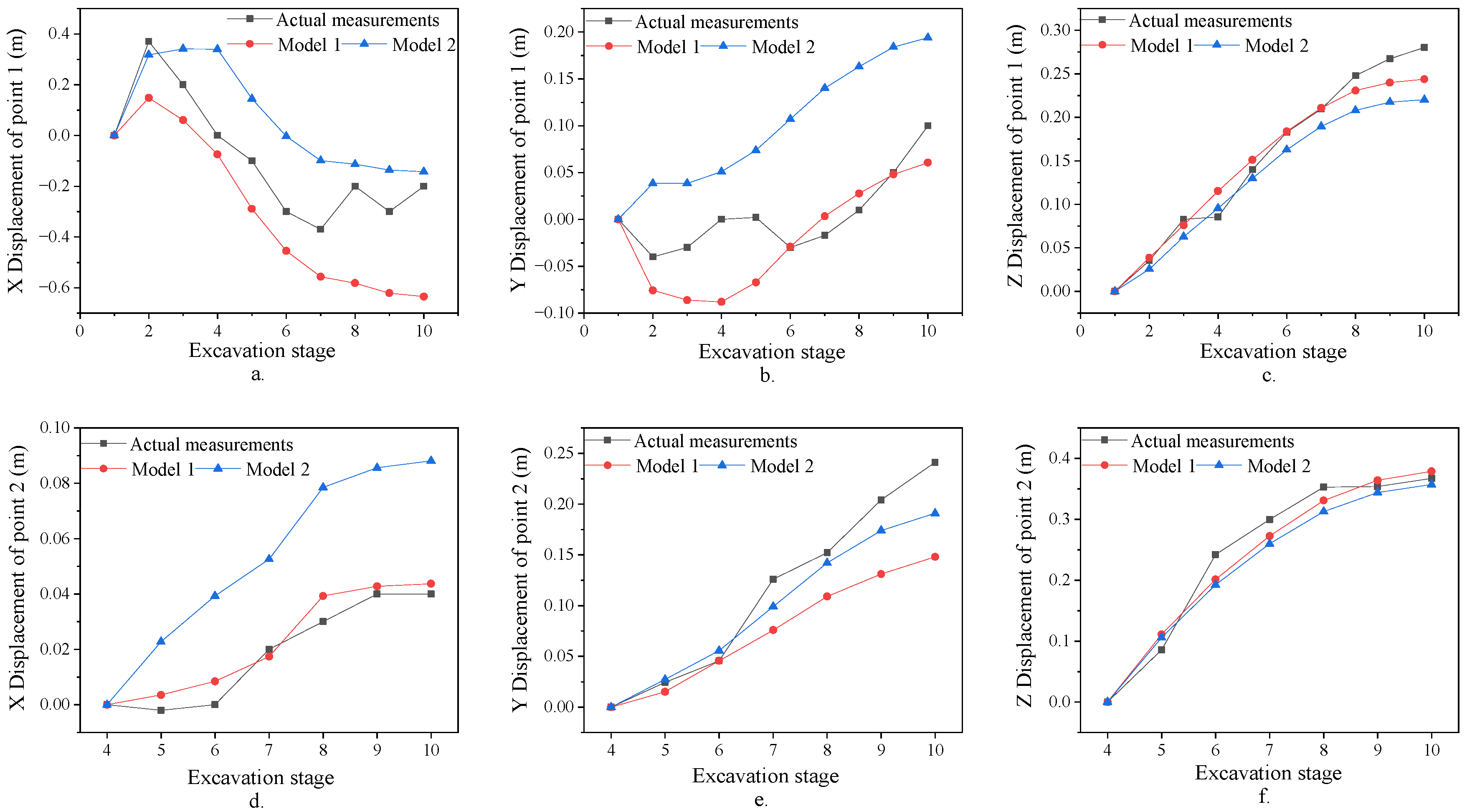
3.2.2. Model Assumptions, Mesh Generation, Boundary Conditions, and Validation
- The pit is excavated in layers.
- Anchor construction and the prestressing are completed instantly with no loss of prestress.
- The anchors are considered by cable elements in the numerical model. Each cable element is defined by its geometric, material, and grout properties. The cable behaves as an elastic, perfectly plastic material that can yield in tension and compression but cannot resist a bending moment. A cable is grouted such that force develops along its length in response to relative motion between the cable and the grid. The grout behaves as an elastic, perfectly plastic material, with its peak strength being confining stress dependent and with no loss of strength after failure.
3.2.3. Numerical Evaluation of the Slope Stability
- The WZ method considers the weak interlayer as a ‘weak zone’ with isotropic materials and employs the Mohr–Coulomb Model [41] for modeling weak interlayers. This method treats potential sliding surfaces as isotropic materials with lower mechanical parameters in all directions, making them more conservative than other methods.
- The UJ method regards the weak interlayer as a ‘weak zone’ with anisotropic materials and uses the built-in Ubiquitous-joint constitutive model for modeling weak interlayers. This model accounts for the presence of an orientation of weakness (weak plane) in a Mohr–Coulomb model. The criterion for failure on the plane, whose orientation is given, consists of a composite Mohr–Coulomb envelope with tension cutoff. The position of a stress point on the latter envelope is controlled again by a non-associated flow rule for shear failure and an associated rule for tension failure [41]. This method maintains anisotropy, with lower mechanical properties along the bedding plane and consistent properties with other rock masses in other directions.
- The IF method considers the potential sliding surface as a two-dimensional plane unit and takes into account properties such as friction angle and cohesion. This approach does not involve the concept of interface thickness, making it closer to real-world conditions. However, the values for shear stiffness and normal stiffness of the interface need to be determined artificially. These two parameters were estimated using the recommended method in the FLAC3D manual [41]:
3.2.4. Factors Inducing Slope Instability
- Many previous studies have reported that the anchoring force attenuates [59,60,61]. Field monitoring data reported by Shi, et al. [62] show that the prestressing loss of anchorage cables can reach approximately 20% in 120 days. Furthermore, the corrosive environment also reduces the anchoring force. Prestressing loss caused by corrosion occurs after 120 days and reaches 4.3% [31]. Longer-term monitoring data show that the prestressing loss can reach 28.48% after more than ten years [59]. Together, these studies indicate that the prestressing loss occurs in phases. To simulate the prestressing loss, we set prestressing at three gradients: 80%, 75%, and 70% (Table 5).
- The weakening effects caused by the interaction of water and rock will decrease the stability of a rock slope. The pore pressure will increase, and the strength will decrease under this effect. The weakening effect caused by rainfall does not include the pore pressure increasing in the present study, considering the additional complexity and computational cost involved. To better understand the mechanisms of softening, Xiong, et al. [63] analyzed the triaxial shear test data of 30 groups of dry and saturated rocks. They proposed the cohesion (C) of the saturated sample is reduced by 31.8%, and the friction angle (φ) is almost unchanged. In the present study, we set C to three gradients, as 90%, 80%, and 70%, to simulate the softening of rock materials at different saturations, listed in Table 5.
- The pseudo-static approach is a common method to analyze the slope stability subject to seismic disturbance [64]. This method simplified the problem by treating the earthquake load as a static load:
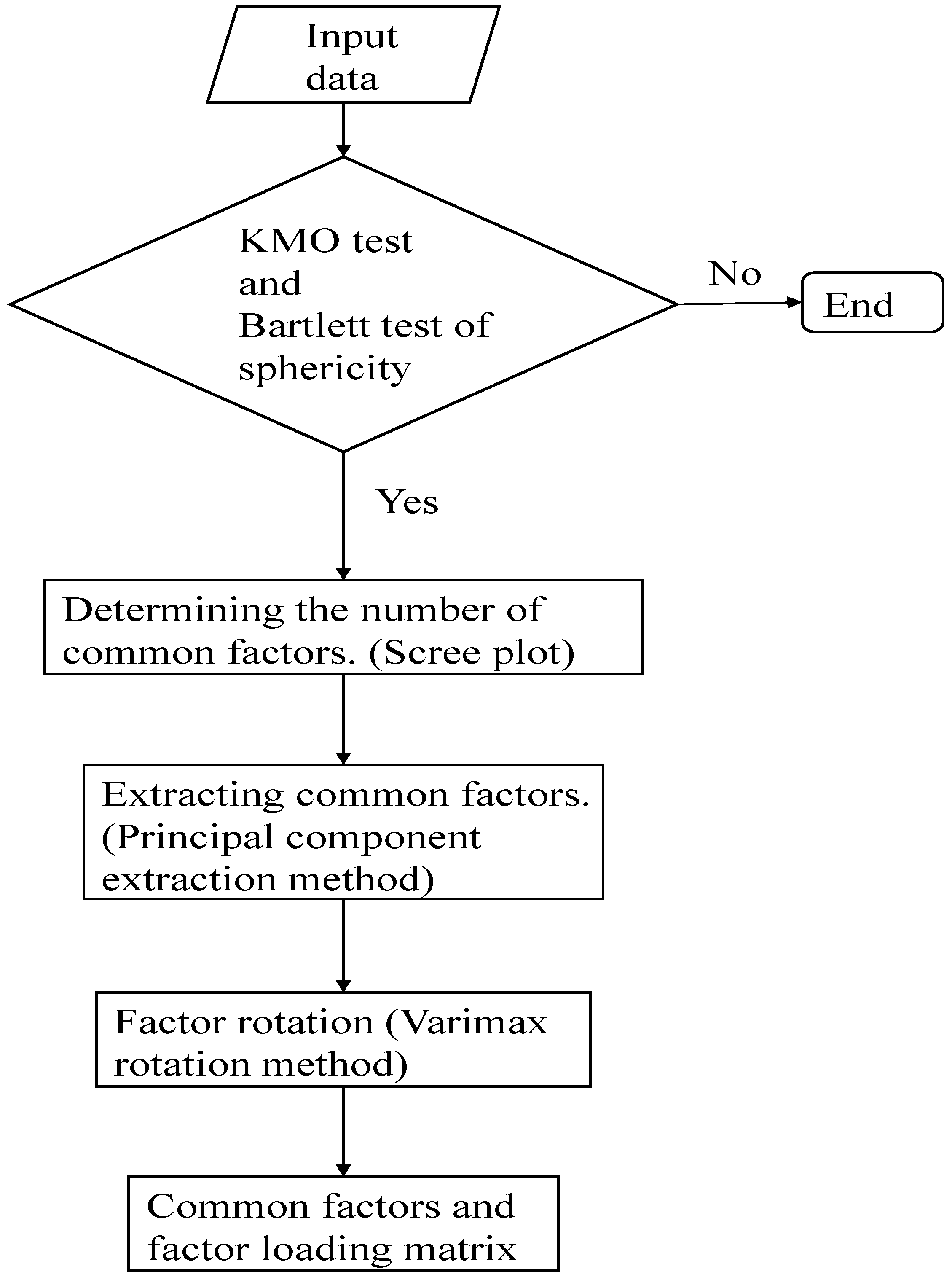
3.3. Identification of Triggering Factor
4. Results
4.1. Results of LEM
4.2. Results of Numerical Simulation
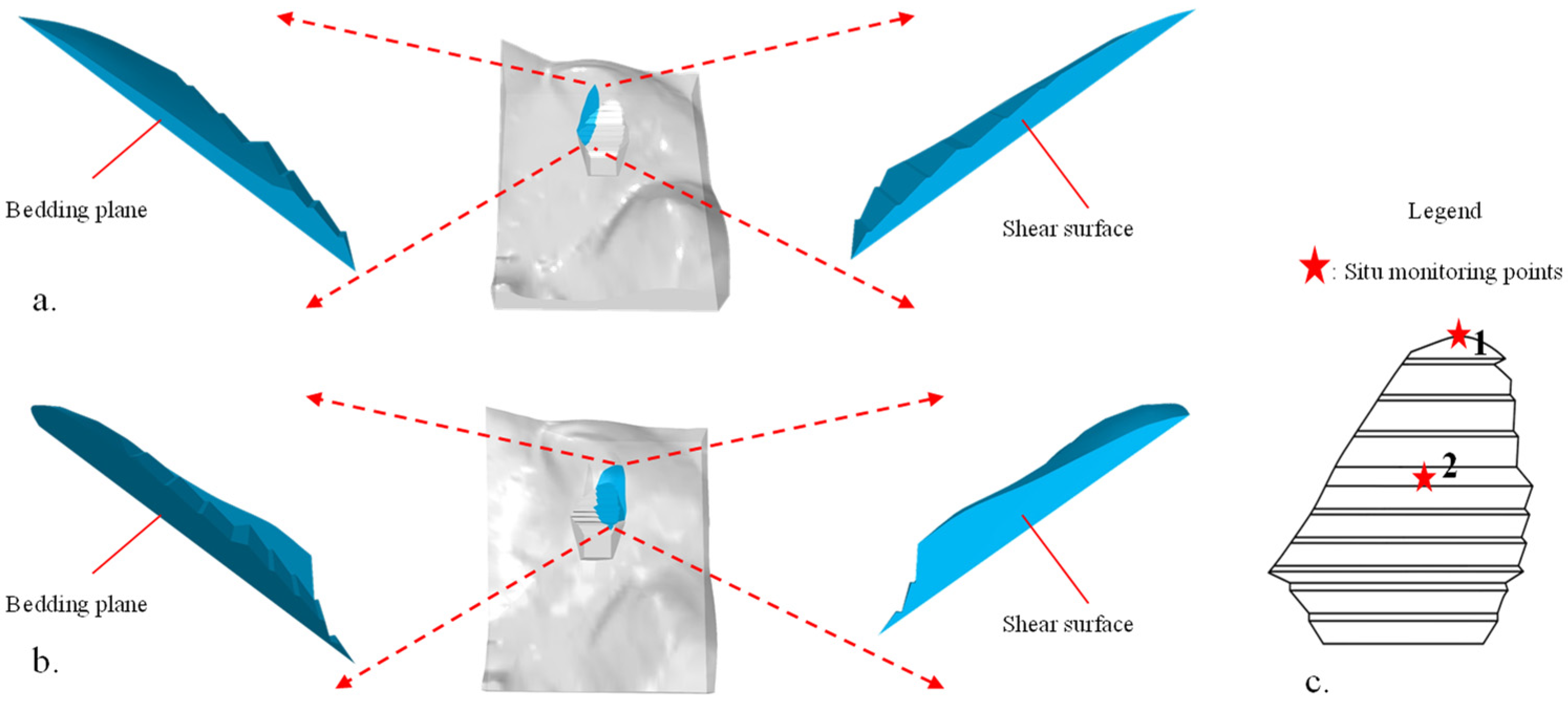
4.2.1. Deformation Characteristics and Sliding Modes of Slope
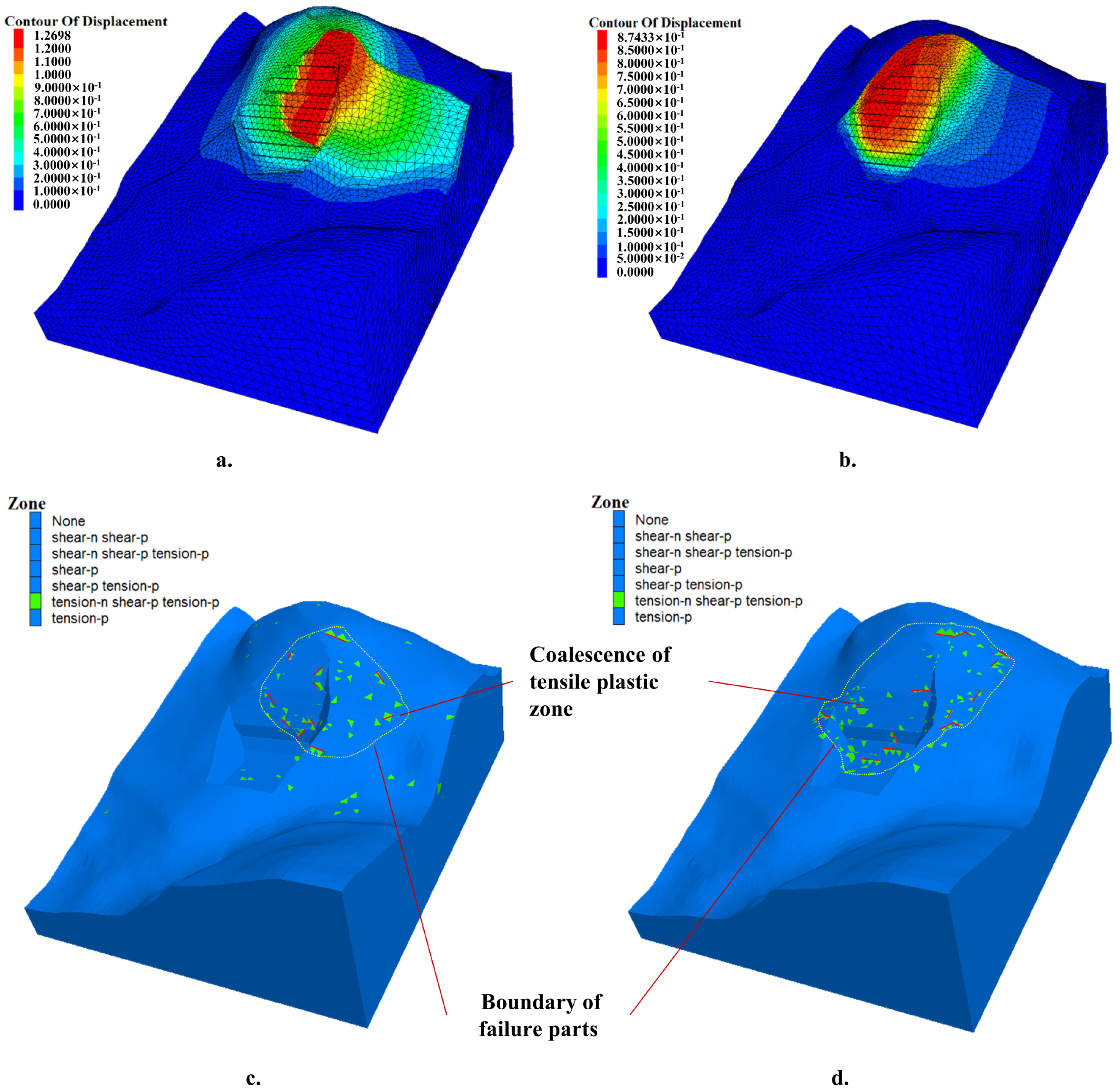
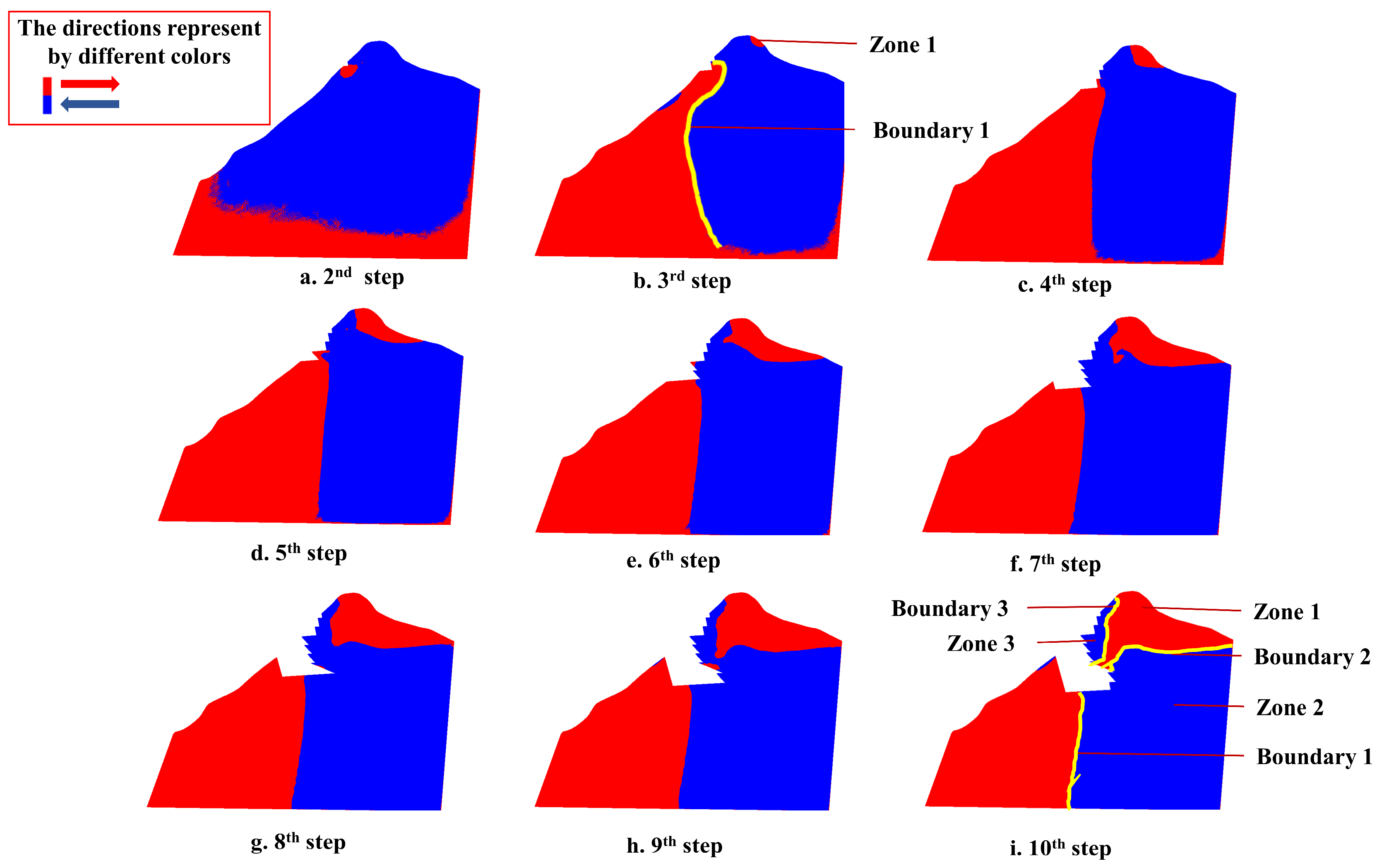
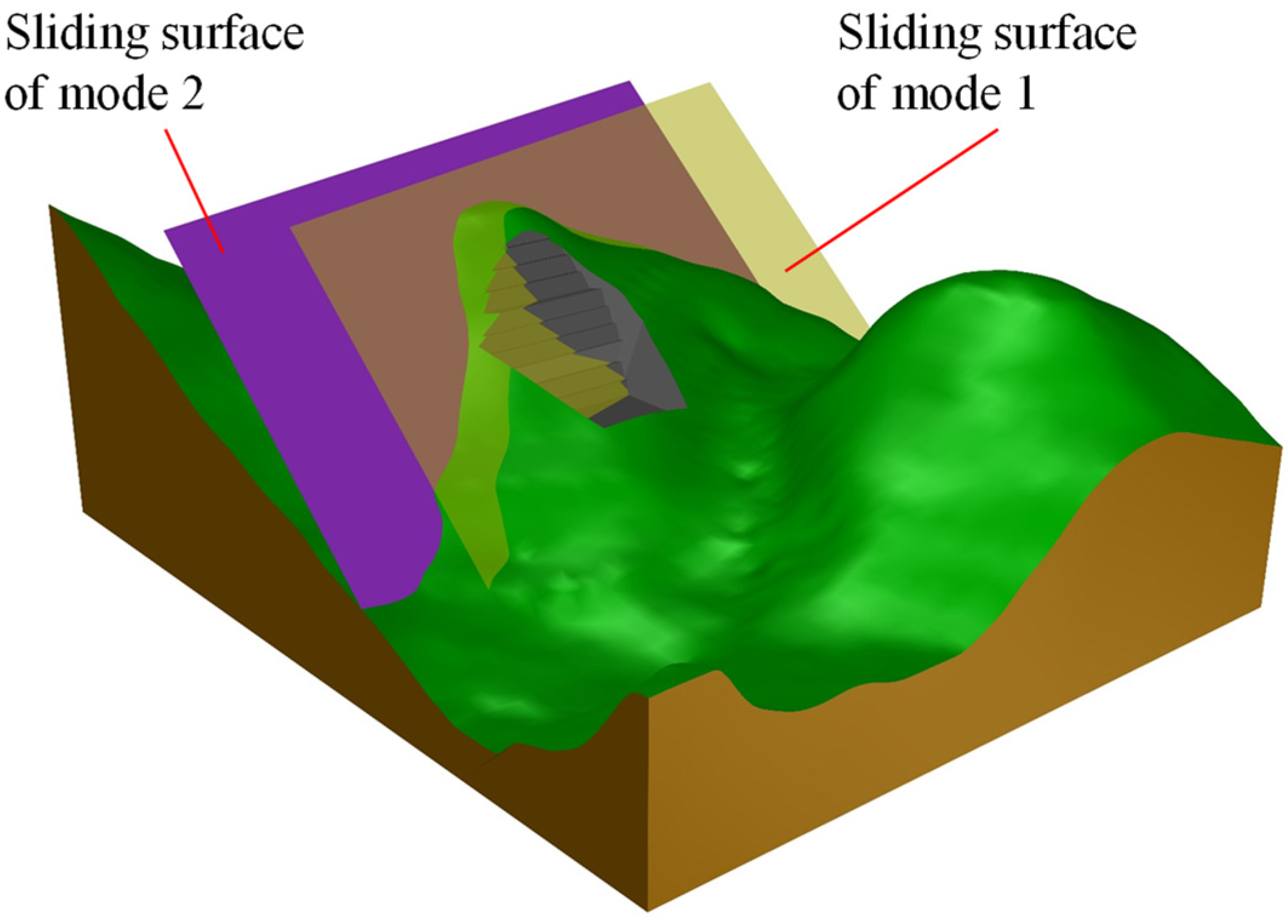
- The sliding surface of Model 1 is exposed on the slope surface (Figure 10a). The unexcavated part on the right is significantly deformed, which means the sliding block is pulling the unexcavated part of the rock mass. The coalescence of the plastic tensile zone appears on the 3rd, 5th, 7th and 8th steps (Figure 10c).
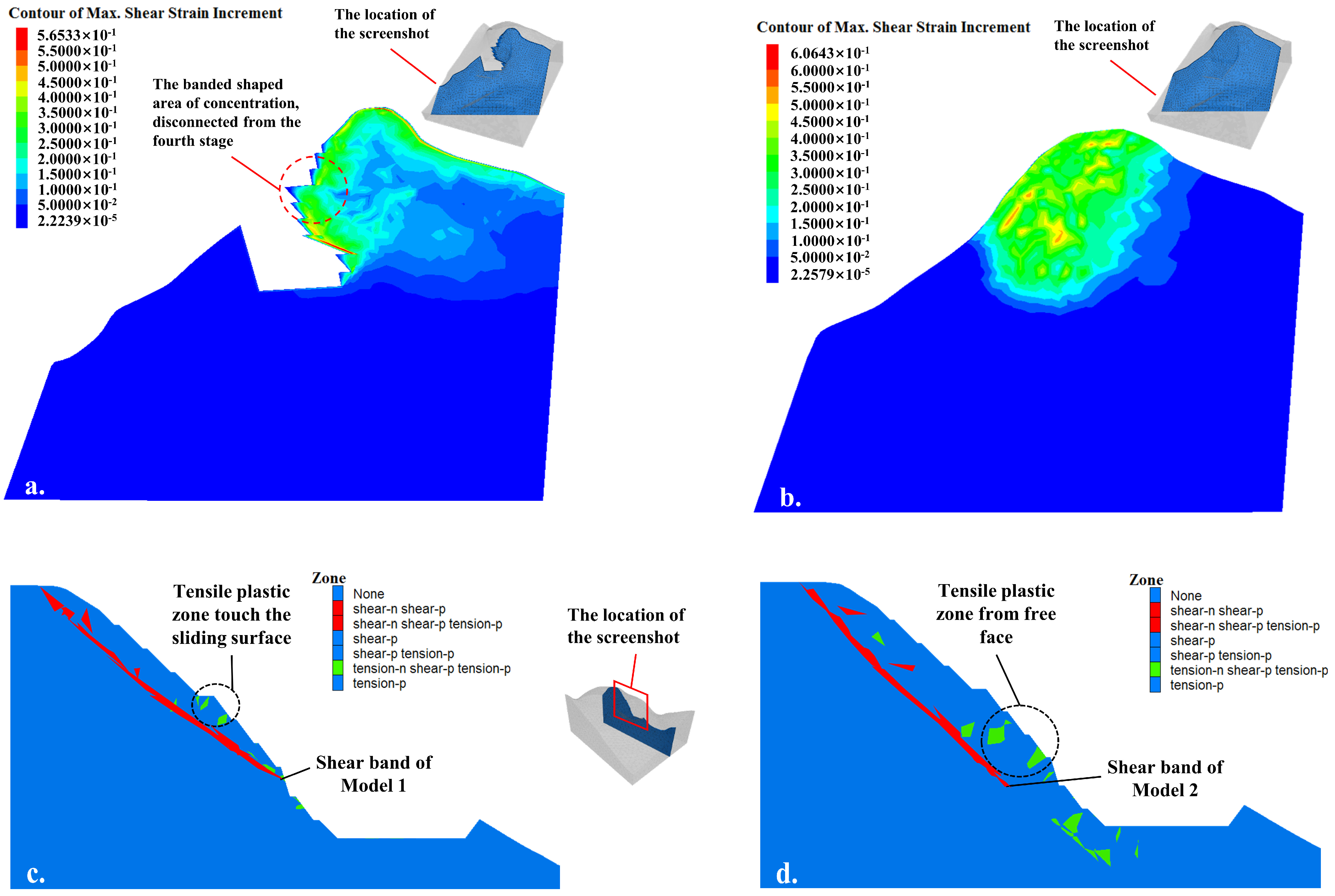
- The maximum shear strain increment is concentrated at the lower and top of the sliding surface, creating a banded concentration area in Model 1 (refer to Figure 11a). This area is very close to the daylight of the potential sliding surface. The shear strain increment area gradually diffuses to the right, indicating that the rocks in the concentrated area exert a strong drawing effect on the unexcavated rock mass. The drawing effect caused by the banded area of the sliding surface can easily lead to slope cracking and the formation of a sliding block. The forming process of this band will be discussed in Section 5.2. The sliding block may deform asymmetrically, potentially leading to rotational failure on the plane. The sliding surface of Model 1 is exposed on the slope surface, forming a sliding block. This failure mode reflects cracking from the back edge, as reported by Zhao, L.H [4].
- In Model 2 (Figure 11b), the maximum shear strain increment is concentrated at the middle and top of the slope and diminishes at the lower part. This indicates that the deformation of the entire potential sliding surface is impeded at the bottom. The bottom of the slope strongly constrains the sliding body. When the upper rock experiences significant pressure, the sliding body is susceptible to buckling failure in the middle. Even slight deformation in the middle of the sliding body can result in a substantial bending moment. Lin et al. [2] suggested that this locking phenomenon may be caused by the front edge of the slope.
4.2.2. FOS by Numerical Simulation
4.3. EFA Results
5. Discussion
5.1. Determination of Potential Sliding Surface of Bedding Slope
5.2. Failure Modes
5.3. Exploratory Factor Analysis
- Drainage ditches should be added at the slope to moderate the seepage caused by rainfall. The occurrence of cracks should be monitored to deal with the occurrence of local damage (Failure Mode 1).
- Measures to resist horizontal load should be set to prevent the development of deep sliding surfaces (Failure Mode 2), including, but not limited to, increasing the anchoring depth, improving the material resistance of the anchoring section, and optimizing the inclination of the anchoring structure.
6. Conclusions
- According to the simulation results, the potential slope failure mechanism varies based on the specific trigger.
- EFA can productively extract the underlying information of the FOS and identify the trigger of slope failure. Bringing EFA into the process of forward analysis can help designers identify the main triggers and make decisions early.
- This study only considers the reduction of rock strength parameters in rainy conditions. However, it does not take into account the additional load from water seepage, which increases internal stresses and makes the slope more susceptible to instability.
- In this paper, earthquake loading is treated as a constant horizontal force. Seismic waves generated by earthquakes propagate in all directions but can be affected by the local geological structure. Slopes closer to the earthquake’s epicenter experience stronger, more directional vibrations, and may also undergo rotations. Additionally, steep slopes are more susceptible to horizontal vibrations, which in this manuscript were considered.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Single Factor | Double Factor | ||
|---|---|---|---|
| Variable | Factor Loading | Variable | Factor Loading |
| W1 (Prestressing loss) | 0.866 | W5 (Prestressing loss and Earthquake) | 0.710 |
| W3 (Earthquake) | 0.553 | W4 (Prestressing loss and Rainfall) | 0.564 |
| W2 (Rainfall) | 0.506 | W6 (Rainfall and Earthquake) | 0.542 |
| Variable | F1 | F2 | Commonality |
|---|---|---|---|
| W1 (Prestressing loss) | 0.634 | 0.774 | 1.000 |
| W2 (Rainfall) | 0.692 | 0.722 | 1.000 |
| W3 (Earthquake) | 0.732 | 0.681 | 0.999 |
| W4 (Prestressing loss and Rainfall) | 0.661 | 0.750 | 1.000 |
| W5 (Prestressing loss and Earthquake) | 0.707 | 0.706 | 0.998 |
| W6 (Rainfall and Earthquake) | 0.771 | 0.636 | 0.999 |
| W7 (Prestressing loss and Rainfall and Earthquake) | 0.757 | 0.653 | 1.000 |
| Contribution rate (%) | 50.306 | 49.643 | |
| Accumulative contribution (%) | 50.306 | 99.950 |
| Single Factor | Double Factor | ||
|---|---|---|---|
| Variable | Factor Loading | Variable | Factor Loading |
| W3 (Earthquake) | 0.732 | W6 (Rainfall and Earthquake) | 0.771 |
| W2 (Rainfall) | 0.692 | W5 (Prestressing loss and Earthquake) | 0.707 |
| W1 (Prestressing loss) | 0.634 | W4 (Prestressing loss and Rainfall) | 0.661 |
| Single Factor | Double Factor | ||
|---|---|---|---|
| Variable | Factor Loading | Variable | Factor Loading |
| W1 (Prestressing loss) | 0.774 | W4 (Prestressing loss and Rainfall) | 0.750 |
| W2 (Rainfall) | 0.722 | W5 (Prestressing loss and Earthquake) | 0.706 |
| W3 (Earthquake) | 0.681 | W6 (Rainfall and Earthquake) | 0.636 |
References
- Hoek, E.; Bray, J. Rock Slope Engineering, 3rd ed.; Inst. Mining and Metallurgy: London, UK, 1981; p. 358. [Google Scholar]
- Lin, F.; Wu, L.Z.; Huang, R.Q.; Zhang, H. Formation and characteristics of the Xiaoba landslide in Fuquan, Guizhou, China. Landslides 2018, 15, 669–681. [Google Scholar] [CrossRef]
- Zhang, S.-L.; Zhu, Z.-H.; Qi, S.-C.; Hu, Y.-X.; Du, Q.; Zhou, J.-W. Deformation process and mechanism analyses for a planar sliding in the Mayanpo massive bedding rock slope at the Xiangjiaba Hydropower Station. Landslides 2018, 15, 2061–2073. [Google Scholar] [CrossRef]
- Zhao, L.; Li, D.; Tan, H.; Cheng, X.; Zuo, S. Characteristics of failure area and failure mechanism of a bedding rockslide in Libo County, Guizhou, China. Landslides 2019, 16, 1367–1374. [Google Scholar] [CrossRef]
- Feng, P.; Lajtai, E.Z. Probabilistic treatment of the sliding wedge with EzSlide. Eng. Geol. 1998, 50, 153–163. [Google Scholar] [CrossRef]
- Tofani, V.; Dapporto, S.; Vannocci, P.; Casagli, N. Infiltration, seepage and slope instability mechanisms during the 20–21 November 2000 rainstorm in Tuscany, central Italy. Nat. Hazards Earth Syst. Sci. 2006, 6, 1025–1033. [Google Scholar] [CrossRef]
- Frayssines, M.; Hantz, D. Modelling and back-analysing failures in steep limestone cliffs. Int. J. Rock Mech. Min. 2009, 46, 1115–1123. [Google Scholar] [CrossRef]
- Paronuzzi, P.; Rigo, E.; Bolla, A. Influence of filling-drawdown cycles of the Vajont reservoir on Mt. Toc slope stability. Geomorphology 2013, 191, 75–93. [Google Scholar] [CrossRef]
- Eberhardt, E.; Stead, D.; Coggan, J. Numerical analysis of initiation and progressive failure in natural rock slopes—The 1991 Randa rockslide. Int. J. Rock Mech. Min. 2004, 41, 69–87. [Google Scholar] [CrossRef]
- Sturzenegger, M.; Stead, D. The Palliser Rockslide, Canadian Rocky Mountains: Characterization and modeling of a stepped failure surface. Geomorphology 2012, 138, 145–161. [Google Scholar] [CrossRef]
- Boon, C.; Houlsby, G.; Utili, S. New insights into the 1963 Vajont slide using 2D and 3D distinct-element method analyses. Geotechnique 2014, 64, 800–816. [Google Scholar] [CrossRef]
- Sandøy, G.; Oppikofer, T.; Nilsen, B. Why did the 1756 Tjellefonna rockslide occur? A back-analysis of the largest historic rockslide in Norway. Geomorphology 2017, 289, 78–95. [Google Scholar] [CrossRef]
- Chen, G.-Q.; Huang, R.-Q.; Zhang, F.-S.; Zhu, Z.-F.; Shi, Y.-C.; Wang, J.-C. Evaluation of the possible slip surface of a highly heterogeneous rock slope using dynamic reduction method. J. Mt. Sci. 2018, 15, 672–684. [Google Scholar] [CrossRef]
- Bolla, A.; Paronuzzi, P. Numerical Investigation of the Pre-collapse Behavior and Internal Damage of an Unstable Rock Slope. Rock Mech. Rock Eng. 2020, 53, 2279–2300. [Google Scholar] [CrossRef]
- Franci, A.; Cremonesi, M.; Perego, U.; Oñate, E.; Crosta, G. 3D simulation of Vajont disaster. Part 2: Multi-failure scenarios. Eng. Geol. 2020, 279, 105856. [Google Scholar] [CrossRef]
- Fan, G.; Zhang, J.; Wu, J.; Yan, K. Dynamic Response and Dynamic Failure Mode of a Weak Intercalated Rock Slope Using a Shaking Table. Rock Mech. Rock Eng. 2016, 49, 3243–3256. [Google Scholar] [CrossRef]
- Tang, H.; Yong, R.; Eldin, M.A.M.E. Stability analysis of stratified rock slopes with spatially variable strength parameters: The case of Qianjiangping landslide. Bull. Eng. Geol. Environ. 2017, 76, 839–853. [Google Scholar] [CrossRef]
- Tang, J.; Dai, Z.; Wang, Y.; Zhang, L. Fracture Failure of Consequent Bedding Rock Slopes After Underground Mining in Mountainous Area. Rock Mech. Rock Eng. 2019, 52, 2853–2870. [Google Scholar] [CrossRef]
- Rotaru, A.; Bejan, F.; Almohamad, D. Sustainable Slope Stability Analysis: A Critical Study on Methods. Sustainability 2022, 14, 8847. [Google Scholar] [CrossRef]
- Steiakakis, E.; Xiroudakis, G.; Lazos, I.; Vavadakis, D.; Bazdanis, G. Stability Analysis of a Multi-Layered Slope in an Open Pit Mine. Geosciences 2023, 13, 359. [Google Scholar] [CrossRef]
- Tang, C.A.; Liang, Z.Z.; Zhang, Y.B.; Chang, X.; Tao, X.; Wang, D.G.; Zhang, J.X.; Liu, J.S.; Zhu, W.C.; Elsworth, D. Fracture spacing in layered materials: A new explanation based on two-dimensional failure process modeling. Am. J. Sci. 2008, 308, 49–72. [Google Scholar] [CrossRef]
- Xu, T.; Ranjith, P.; Wasantha, P.; Zhao, J.; Tang, C.; Zhu, W. Influence of the geometry of partially-spanning joints on mechanical properties of rock in uniaxial compression. Eng. Geol. 2013, 167, 134–147. [Google Scholar] [CrossRef]
- Vergara, M.R.; Kudella, P.; Triantafyllidis, T. Large Scale Tests on Jointed and Bedded Rocks Under Multi-Stage Triaxial Compression and Direct Shear. Rock Mech. Rock Eng. 2015, 48, 75–92. [Google Scholar] [CrossRef]
- Zhou, J.-F.; Qin, C.-B. A novel procedure for 3D slope stability analysis: Lower bound limit analysis coupled with block element method. Bull. Eng. Geol. Environ. 2020, 79, 1815–1829. [Google Scholar] [CrossRef]
- Yan, C.; Wang, H. Three-dimensional stability of slopes with cut-fill interface based on upper-bound limit analysis. Yantu Gongcheng Xuebao/Chin. J. Geotech. Eng. 2024, 46, 174–181. [Google Scholar]
- Van Eeckhout, E.M. The mechanisms of strength reduction due to moisture in coal mine shales. Int. J. Rock Mech. Min. Sci. Geomech. Abstr. 1976, 13, 61–67. [Google Scholar] [CrossRef]
- Vasarhelyi, B. Some observations regarding the strength and deformability of sandstones in dry and saturated conditions. Bull. Eng. Geol. Environ. 2003, 62, 245–249. [Google Scholar] [CrossRef]
- Li, D.; Wong, L.N.Y.; Liu, G.; Zhang, X. Influence of water content and anisotropy on the strength and deformability of low porosity meta-sedimentary rocks under triaxial compression. Eng. Geol. 2012, 126, 46–66. [Google Scholar] [CrossRef]
- Wasantha, P.; Ranjith, P. Water-weakening behavior of Hawkesbury sandstone in brittle regime. Eng. Geol. 2014, 178, 91–101. [Google Scholar] [CrossRef]
- Song, Y.; Li, Y. Study on the constitutive model of the whole process of macroscale and mesoscale shear damage of prestressed anchored jointed rock. Bull. Eng. Geol. Environ. 2021, 80, 6093–6106. [Google Scholar] [CrossRef]
- Li, C.; Zhang, R.-T.; Zhu, J.-B.; Liu, Z.-J.; Lu, B.; Wang, B.; Jiang, Y.-Z.; Liu, J.-S.; Zeng, P. Model test of the stability degradation of a prestressed anchored rock slope system in a corrosive environment. J. Mt. Sci. 2020, 17, 2548–2561. [Google Scholar] [CrossRef]
- Wu, S.G.; Fu, H.M.; Zhang, Y.Y. Study on anchorage mechanism and application of tension-compression dispersive anchor cable. Rock Soil Mechanics. 2018, 39, 2155. [Google Scholar]
- Zheng, D.; Liu, F.-Z.; Ju, N.-P.; Frost, J.D.; Huang, R.-Q. Cyclic load testing of pre-stressed rock anchors for slope stabilization. J. Mt. Sci. 2016, 13, 126–136. [Google Scholar] [CrossRef]
- Li, J.; Law, S.; Ding, Y. Substructure damage identification based on response reconstruction in frequency domain and model updating. Eng. Struct. 2012, 41, 270–284. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, G. Analytical mode decomposition with Hilbert transform for modal parameter identification of buildings under ambient vibration. Eng. Struct. 2014, 59, 173–184. [Google Scholar] [CrossRef]
- Song, D.; Chen, Z.; Ke, Y.; Nie, W. Seismic response analysis of a bedding rock slope based on the time-frequency joint analysis method: A case study from the middle reach of the Jinsha River, China. Eng. Geol. 2020, 274, 105731. [Google Scholar] [CrossRef]
- Johnson, P.A.; McCuen, R.H.; Hromadka, T.V. Magnitude and frequency of debris flows. J. Hydrol. 1991, 123, 69–82. [Google Scholar] [CrossRef]
- Shi, M.; Chen, J.; Song, Y.; Zhang, W.; Song, S.; Zhang, X. Assessing debris flow susceptibility in Heshigten Banner, Inner Mongolia, China, using principal component analysis and an improved fuzzy C-means algorithm. Bull. Eng. Geol. Environ. 2016, 75, 909–922. [Google Scholar] [CrossRef]
- Liang, Z.; Wang, C.; Han, S.; Khan, K.U.J.; Liu, Y. Classification and susceptibility assessment of debris flow based on a semi-quantitative method combination of the fuzzy C-means algorithm, factor analysis and efficacy coefficient. Nat. Hazards Earth Syst. Sci. 2020, 20, 1287–1304. [Google Scholar] [CrossRef]
- Bowa, V.M.; Kasanda, T. Wedge Failure Analyses of the Jointed Rock Slope Influenced by Foliations. Geotech. Geol. Eng. 2020, 38, 4701–4710. [Google Scholar] [CrossRef]
- Itasca. FLAC3D Fast Lagrangian Analysis of Continua in 3Dimensions User’s Guide Fifth Edition (FLAC3D Version 5.0); Itasca Consulting Group: Minneapolis, MN, USA, 2012. [Google Scholar]
- Hoek, E. Practical Rock Engineering. 2007. Available online: https://www.rocscience.com/learning/hoeks-corner (accessed on 25 June 2024).
- Tutluoglu, L.; Öge, I.F.; Karpuz, C. Two and three dimensional analysis of a slope failure in a lignite mine. Comput. Geosci. 2011, 37, 232–240. [Google Scholar] [CrossRef]
- Chang, K.-T.; Ge, L.; Lin, H.-H. Slope creep behavior: Observations and simulations. Environ. Earth Sci. 2015, 73, 275–287. [Google Scholar] [CrossRef]
- Yu, F.; Zhang, Y.; Chen, S.X.; Li, J. Numerical Simulation Study on the Failure Mechanism of Bedding Rock Slope Based on the Lagrangian Multiplier Method. In Applied Science, Materials Science and Information Technologies in Industry; Liu, D.L., Zhu, X.B., Xu, K.L., Fang, D.M., Eds.; Applied Mechanics and Materials; Trans Tech Publications Ltd.: Zurich, Switzerland, 2014; Volume 513–517, pp. 2603–2606. [Google Scholar]
- Jiang, Q.-Q. Strength reduction method for slope based on a ubiquitous-joint criterion and its application. Min. Sci. Technol. (China) 2009, 19, 452–456. [Google Scholar] [CrossRef]
- Wang, T.-T.; Huang, T.-H. Anisotropic Deformation of a Circular Tunnel Excavated in a Rock Mass Containing Sets of Ubiquitous Joints: Theory Analysis and Numerical Modeling. Rock Mech. Rock Eng. 2014, 47, 643–657. [Google Scholar] [CrossRef]
- Sainsbury, B.L.; Sainsbury, D.P. Practical Use of the Ubiquitous-Joint Constitutive Model for the Simulation of Anisotropic Rock Masses. Rock Mech. Rock Eng. 2017, 50, 1507–1528. [Google Scholar] [CrossRef]
- Zhang, K.; Cao, P.; Meng, J.; Li, K.; Fan, W. Modeling the Progressive Failure of Jointed Rock Slope Using Fracture Mechanics and the Strength Reduction Method. Rock Mech. Rock Eng. 2015, 48, 771–785. [Google Scholar] [CrossRef]
- Azarfar, B.; Ahmadvand, S.; Sattarvand, J.; Abbasi, B. Stability Analysis of Rock Structure in Large Slopes and Open-Pit Mine: Numerical and Experimental Fault Modeling. Rock Mech. Rock Eng. 2019, 52, 4889–4905. [Google Scholar] [CrossRef]
- Cai, F.; Ugai, K.; Wakai, A.; Li, Q. Effects of horizontal drains on slope stability under rainfall by three-dimensional finite element analysis. Comput. Geotech. 1998, 23, 255–275. [Google Scholar] [CrossRef]
- Wilkinson, P.L.; Anderson, M.G.; Lloyd, D.M. An integrated hydrological model for rain-induced landslide prediction. Earth Surf. Process. Landf. 2002, 27, 1285–1297. [Google Scholar] [CrossRef]
- Raj, M.; Sengupta, A. Rain-triggered slope failure of the railway embankment at Malda, India. Acta Geotech. 2014, 9, 789–798. [Google Scholar] [CrossRef]
- Keefer, D.K. Landslides caused by earthquakes. GSA Bull. 1984, 95, 406–421. [Google Scholar] [CrossRef]
- Evans, S.G.; Roberts, N.J.; Ischuk, A.; Delaney, K.B.; Morozova, G.S.; Tutubalina, O. Landslides triggered by the 1949 Khait earthquake, Tajikistan, and associated loss of life. Eng. Geol. 2009, 109, 195–212. [Google Scholar] [CrossRef]
- Xu, C.; Xu, X.; Shyu, J.B.H. Database and spatial distribution of landslides triggered by the Lushan, China Mw 6.6 earthquake of 20 April 2013. Geomorphology 2015, 248, 77–92. [Google Scholar] [CrossRef]
- Jiang, S.-H.; Li, D.-Q.; Zhang, L.M.; Zhou, C.B. Time-dependent system reliability of anchored rock slopes considering rock bolt corrosion effect. Eng. Geol. 2014, 175, 1–8. [Google Scholar] [CrossRef]
- Divi, S.; Chandra, D.; Daemen, J. Corrosion susceptibility of potential rock bolts in aerated multi-ionic simulated concentrated water. Tunn. Undergr. Space Technol. 2011, 26, 124–129. [Google Scholar] [CrossRef]
- Fan, Q.; Zhu, H.; Geng, J. Monitoring result analyses of high slope of five-step ship lock in the Three Gorges Project. J. Rock Mech. Geotech. Eng. 2015, 7, 199–206. [Google Scholar] [CrossRef]
- Sung, H.-J.; Do, T.M.; Kim, J.-M.; Kim, Y.-S. Long-term monitoring of ground anchor tensile forces by FBG sensors embedded tendon. Smart Struct. Syst. 2017, 19, 269–277. [Google Scholar] [CrossRef]
- Lu, G.R.; Wang, Q.B.; Li, X.J.; Wang, L.G. Study and Practice of Controlling Anchorage Force Loss of Prestressed Anchor Rope. Appl. Mech. Mater. 2012, 166–169, 1663–1668. [Google Scholar] [CrossRef]
- Shi, K.; Wu, X.; Tian, Y.; Xie, X. Analysis of Re-Tensioning Time of Anchor Cable Based on New Prestress Loss Model. Mathematics 2021, 9, 1094. [Google Scholar] [CrossRef]
- Xiong, D.; Zhao, Z.; Chengdong, S.U.; Wang, G. Experimental study of effect of water-saturated state on mechanical properties of rock in coal measure strata. Chin. J. Rock Mech. Eng. 2011, 30, 998–1006. [Google Scholar]
- Zheng, Y.; Chen, C.; Liu, T.; Ren, Z. A new method of assessing the stability of anti-dip bedding rock slopes subjected to earthquake. Bull. Eng. Geol. Environ. 2021, 80, 3693–3710. [Google Scholar] [CrossRef]
- Duan, Z.; Cheng, W.-C.; Peng, J.-B.; Wang, Q.-Y.; Chen, W. Investigation into the triggering mechanism of loess landslides in the south Jingyang platform, Shaanxi province. Bull. Eng. Geol. Environ. 2019, 78, 4919–4930. [Google Scholar] [CrossRef]
- Sultan, N.; Cochonat, P.; Canals, M.; Cattaneo, A.; Dennielou, B.; Haflidason, H.; Laberg, J.; Long, D.; Mienert, J.; Trincardi, F.; et al. Triggering mechanisms of slope instability processes and sediment failures on continental margins: A geotechnical approach. Mar. Geol. 2004, 213, 291–321. [Google Scholar] [CrossRef]
- Shen, C.; Sun, J.; Zhang, X.; Luo, Z.; Kong, J.; Lu, C. Study on the role of lateral unsaturated flow in triggering slope failure under varying boundary water level conditions. Adv. Water Resour. 2020, 143, 103669. [Google Scholar] [CrossRef]
- Choi, Y.N.; Hwan, H.S.; Lee, H.H.; Yoo, N.J. Estimation of Magnitude of Debris Flow and Correlation Analysis Between Influencing Factors. J. Korean Geosynth. Soc. 2017, 16, 79–87. [Google Scholar]
- Li, Z.; Chen, J.; Tan, C.; Zhou, X.; Li, Y.; Han, M. Debris flow susceptibility assessment based on topo-hydrological factors at different unit scales: A case study of Mentougou district, Beijing. Environ. Earth Sci. 2021, 80, 365. [Google Scholar] [CrossRef]
- Reimann, C.; Filzmoser, P.; Garrett, R.G. Factor analysis applied to regional geochemical data: Problems and possibilities. Appl. Geochem. 2002, 17, 185–206. [Google Scholar] [CrossRef]
- Zumberge, J.E. Prediction of source rock characteristics based on terpane biomarkers in crude oils: A multivariate statistical approach. Geochim. Cosmochim. Acta 1987, 51, 1625–1637. [Google Scholar] [CrossRef]
- Widaman, K.F. Common factor-analysis versus principal component analysis—Differential bias in representing model parameters. Multivar. Behav. Res. 1993, 28, 263–311. [Google Scholar] [CrossRef] [PubMed]
- Yin, M.; Huang, H.; Oldenburg, T.B. An application of exploratory factor analysis in the deconvolution of heavy oil biodegradation, charging and mixing history in southeastern Mexico. Org. Geochem. 2021, 151, 104161. [Google Scholar] [CrossRef]
- Kim, H.-J. Common Factor Analysis Versus Principal Component Analysis: Choice for Symptom Cluster Research. Asian Nurs. Res. 2008, 2, 17–24. [Google Scholar] [CrossRef] [PubMed]
- Mazzurco, A.; Jesiek, B.K.; Godwin, A. Development of Global Engineering Competency Scale: Exploratory and Confirmatory Factor Analysis. J. Civ. Eng. Educ. 2020, 146, 04019003. [Google Scholar] [CrossRef]
- Kaiser, H.F. Second Generation Little Jiffy. Psychometrika 1970, 35, 401. [Google Scholar] [CrossRef]
- Schreiber, J.B. Issues and recommendations for exploratory factor analysis and principal component analysis. Res. Soc. Adm. Pharm. 2021, 17, 1004–1011. [Google Scholar] [CrossRef] [PubMed]
- Stojanović, K.; Jovančićević, B.; Vitorović, D.; Golovko, J.; Pevneva, G.; Golovko, A. Hierarchy of maturation parameters in oil-source rock correlations. Case study: Drmno depression, Southeastern Pannonian Basin, Serbia and Montenegro. J. Pet. Sci. Eng. 2007, 55, 237–251. [Google Scholar] [CrossRef]
- Nie, L.; Xu, Y.; Dai, S. Slope Engineering; Science Press: Beijing, China, 2010; p. 403. [Google Scholar]
- Zhang, Y. Methods for Seismic Stability of Consequent Bedding Rock Slope and DDA Simulation of Landslide Process; Dalian University of Technology: Dalian, China, 2019. [Google Scholar]


| Locations (Step) | Number | Spacing (m) | Length (m) |
|---|---|---|---|
| 1th | 6 | 4.5 | 34.3 |
| 2nd | 15 | 4.5 | 34.3 |
| 3rd | 21 | 4.5 | 34.3 |
| 4th | 26 | 4.5 | 34.3 |
| 5th | 32 | 4.5 | 30.3 |
| 6th | 39 | 4.5 | 30.3 |
| 7th | 35 | 4.5 | 30.3 |
| 8th | 26 | 4.5 | 30.3 |
| 9th | 24 | 4.5 | 26.3 |
| 10th | 60 | 2 | 5 |
| Material Properties | Density (kN/m3) | Cohesion C (MPa) | Internal Friction Angle φ (°) | Uniaxial Compressive Strengths | Modulus | Tensile Strength (MPa) | ||
|---|---|---|---|---|---|---|---|---|
(MPa) | (MPa) | (GPa) | (GPa) | |||||
| Intact rock | 27 | 14.7 | 31.3 | 63 | —— | 44.1 | —— | 5.9 |
| Rock mass | 24.7 | 0.5 | 30.7 | —— | 1.4 | —— | 4.0 | 0.14 |
| Bedding plane | 27 | 0.09 | 27 | —— | —— | —— | —— | —— |
| Types of Anchorage | Cross-Sectional Area (m2) | Young’s Modulus (GPa) | Tensile Yield Strength (kN) | Grout Cohesive Strength (kN) | Grout Stiffness (MPa) | Grout Exposed Perimeter (m) | Pre-Tension (kN) | Inclination (°) | Anchoring Length (m) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 5.8 × 10−5 | 20 | 1260 | 1000 | 20 | 0.2512 | 1050 | 30 | 10.3 |
| 2 | 5.8 × 10−5 | 20 | 1620 | 1000 | 20 | 0.1884 | 1350 | 30 | 10.3 |
| Cables | 1 × 10−4 | 20 | 1620 | 1000 | 20 | 0.2512 | —— | 30 | 5 |
| Factors | W0 | W1 | W2 | W3 | W4 | W5 | W6 | W7 |
|---|---|---|---|---|---|---|---|---|
| Prestressing loss | √ | √ | √ | √ | ||||
| Rainfall | √ | √ | √ | √ | ||||
| Earthquake | √ | √ | √ | √ |
| Gradients | Pre-Tension (kN) | Cohesion c (kPa) | Earthquake Influence Coefficients | ||
|---|---|---|---|---|---|
| Type 1 | Type 2 | Rock Mass | Bedding Plane | ||
| 1 | 892.5 | 1147.5 | 272.65 | 85.5 | 0.01 |
| 2 | 735 | 945 | 243.95 | 76.5 | 0.03 |
| 3 | 525 | 675 | 215.25 | 67.5 | 0.05 |
| Blocks | 4-1 | 4 | 8 | 8-1 | 8-2 | 9 | 10 | 10-1 |
| FOS | 3.78 | 1.98 | 1.25 | 2.38 | 2.58 | 1.28 | 1.56 | 2.10 |
| Methods and Gradients | W0 | W1 | W2 | W3 | W4 | W5 | W6 | W7 | |
|---|---|---|---|---|---|---|---|---|---|
| WZ | G1 | 1.719 | 1.708 | 1.484 | 1.658 | 1.462 | 1.624 | 1.350 | 1.316 |
| G2 | 1.697 | 1.439 | 1.624 | 1.417 | 1.596 | 1.316 | 1.288 | ||
| G3 | 1.680 (2.28%) | 1.383 (19.54%) | 1.590 (7.49%) | 1.372 (20.20%) | 1.579 (8.14%) | 1.277 (25.73%) | 1.271 (26.06%) | ||
| UJ | G1 | 1.820 | 1.818 | 1.574 | 1.742 | 1.546 | 1.708 | 1.428 | 1.389 |
| G2 | 1.814 | 1.529 | 1.702 | 1.501 | 1.680 | 1.389 | 1.361 | ||
| G3 | 1.809 (0.65%) | 1.467 (19.38%) | 1.669 (8.31%) | 1.456 (20.00%) | 1.663 (8.62%) | 1.350 (25.85%) | 1.344 (26.15%) | ||
| IF | G1 | 1.865 | 1.863 | 1.652 | 1.764 | 1.630 | 1.730 | 1.473 | 1.434 |
| G2 | 1.862 | 1.607 | 1.725 | 1.585 | 1.702 | 1.434 | 1.406 | ||
| G3 | 1.859 (0.30%) | 1.540 (17.42%) | 1.691 (9.31%) | 1.540 (17.42%) | 1.686 (9.61%) | 1.394 (25.23%) | 1.389 (25.23%) | ||
| Methods and Gradients | W0 | W1 | W2 | W3 | W4 | W5 | W6 | W7 | |
|---|---|---|---|---|---|---|---|---|---|
| WZ | G1 | 1.694 | 1.687 | 1.435 | 1.652 | 1.400 | 1.617 | 1.386 | 1.358 |
| G2 | 1.680 | 1.407 | 1.610 | 1.386 | 1.582 | 1.323 | 1.302 | ||
| G3 | 1.673 (1.24%) | 1.379 (18.60%) | 1.561 (7.85%) | 1.365 (19.42%) | 1.540 (9.09%) | 1.274 (24.79%) | 1.253 (26.03%) | ||
| UJ | G1 | 1.799 | 1.792 | 1.533 | 1.764 | 1.484 | 1.743 | 1.470 | 1.449 |
| G2 | 1.785 | 1.498 | 1.722 | 1.470 | 1.701 | 1.400 | 1.386 | ||
| G3 | 1.778 (1.17%) | 1.470 (18.29%) | 1.666 (7.39%) | 1.449 (19.46%) | 1.659 (7.78%) | 1.351 (24.90%) | 1.337 (25.68%) | ||
| IF | G1 | 2.429 | 2.436 | 2.093 | 2.303 | 2.044 | 2.247 | 1.974 | 1.946 |
| G2 | 2.422 | 2.044 | 2.247 | 2.023 | 2.205 | 1.876 | 1.869 | ||
| G3 | 2.415 (0.58%) | 2.009 (17.29%) | 2.177 (10.37%) | 1.995 (17.87%) | 2.170 (10.66%) | 1.813 (25.36%) | 1.806 (25.65%) | ||
| Variable | F1 | F2 | Commonality |
|---|---|---|---|
| W1 (Prestressing loss) | 0.497 | 0.866 | 0.997 |
| W2 (Rainfall) | 0.859 | 0.506 | 0.993 |
| W3 (Earthquake) | 0.818 | 0.553 | 0.975 |
| W4 (Prestressing loss and Rainfall) | 0.815 | 0.564 | 0.983 |
| W5 (Prestressing loss and Earthquake) | 0.693 | 0.710 | 0.984 |
| W6 (Rainfall and Earthquake) | 0.840 | 0.542 | 1.000 |
| W7 (Prestressing loss and Rainfall and Earthquake) | 0.716 | 0.695 | 0.996 |
| Contribution rate (%) | 57.393 | 41.589 | |
| Accumulative contribution (%) | 57.393 | 98.981 |
| Single Factor | Double Factor | ||
|---|---|---|---|
| Variable | Factor Loading | Variable | Factor Loading |
| W2 (Rainfall) | 0.859 | W6 (Rainfall and Earthquake) | 0.840 |
| W3 (Earthquake) | 0.818 | W4 (Prestressing loss and Rainfall) | 0.815 |
| W1 (Prestressing loss) | 0.497 | W5 (Prestressing loss and Earthquake) | 0.693 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, S.; Wang, C. Numerical Investigation of Bedding Rock Slope Potential Failure Modes and Triggering Factors: A Case Study of a Bridge Anchorage Excavated Foundation Pit Slope. Appl. Sci. 2024, 14, 6891. https://doi.org/10.3390/app14166891
Han S, Wang C. Numerical Investigation of Bedding Rock Slope Potential Failure Modes and Triggering Factors: A Case Study of a Bridge Anchorage Excavated Foundation Pit Slope. Applied Sciences. 2024; 14(16):6891. https://doi.org/10.3390/app14166891
Chicago/Turabian StyleHan, Songling, and Changming Wang. 2024. "Numerical Investigation of Bedding Rock Slope Potential Failure Modes and Triggering Factors: A Case Study of a Bridge Anchorage Excavated Foundation Pit Slope" Applied Sciences 14, no. 16: 6891. https://doi.org/10.3390/app14166891