
Multi-Body Dynamics Modeling and Simulation of Maglev Satellites


Abstract
1. Introduction
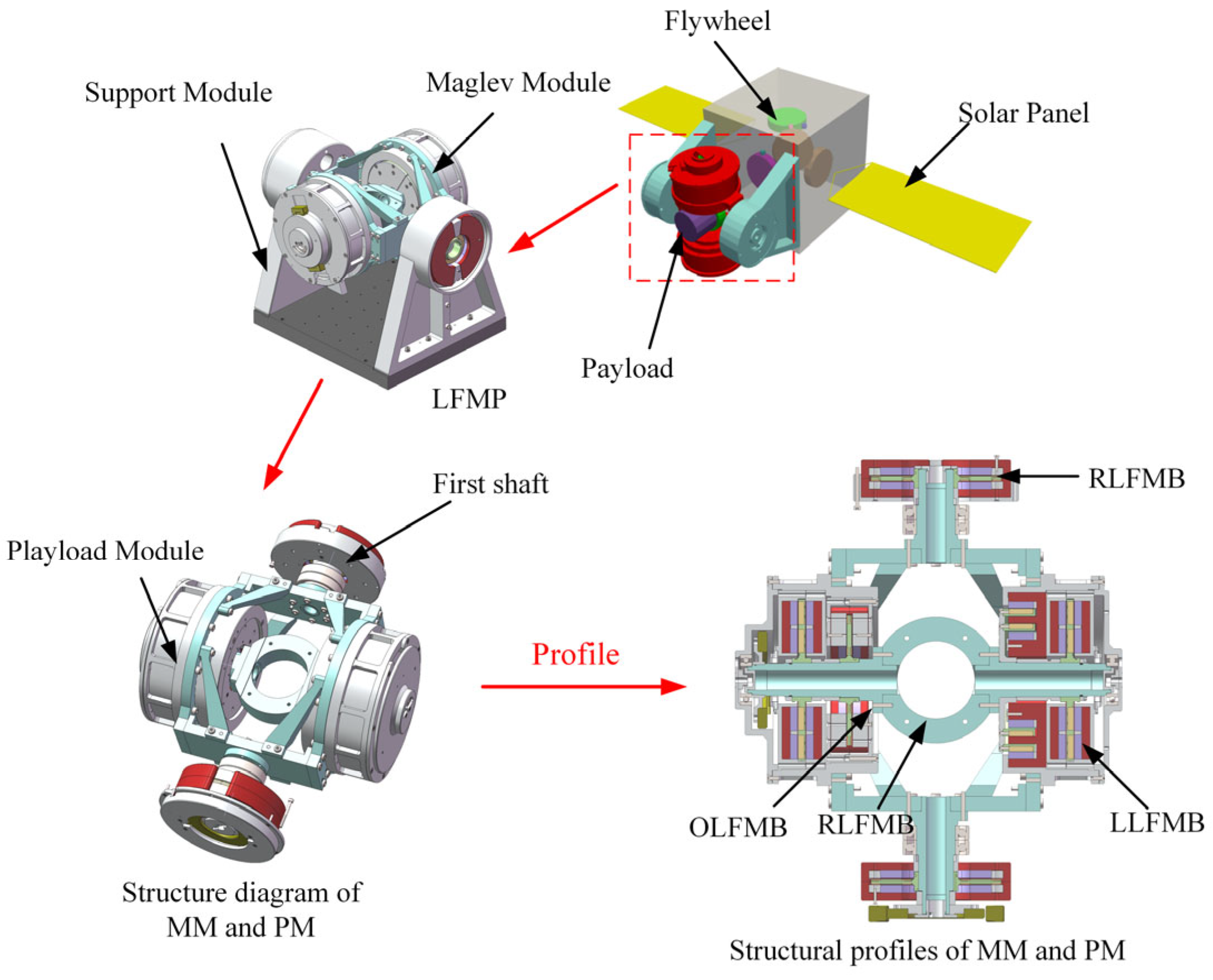
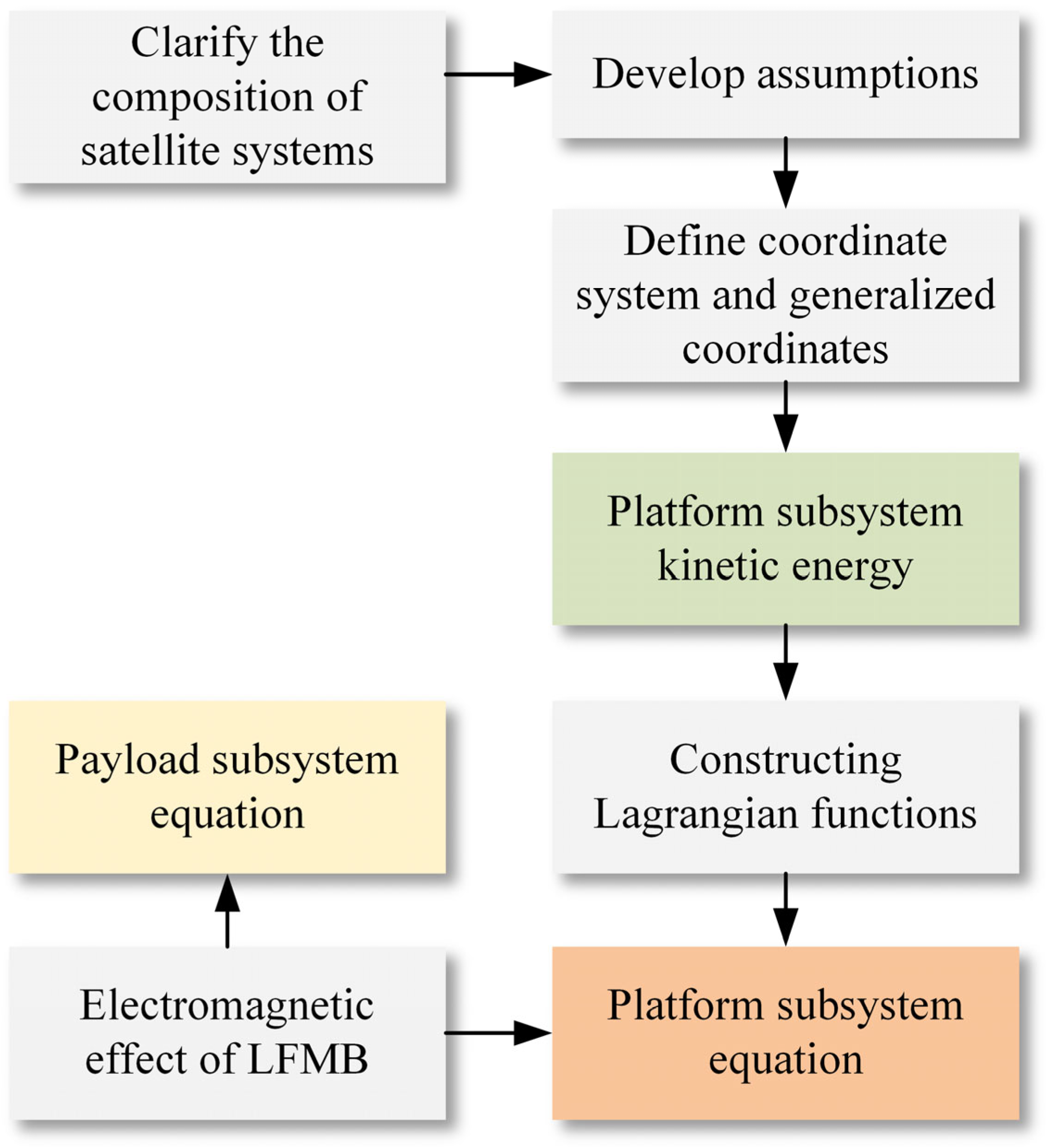
2. Modeling of Three Body Dynamics of Maglev Satellite
2.1. Definition of Coordinate System and Position Vector
2.2. Platform Subsystem Kinetic Energy
2.3. Platform Subsystem Dynamics Equation
2.4. Payload Subsystem Dynamics Equation
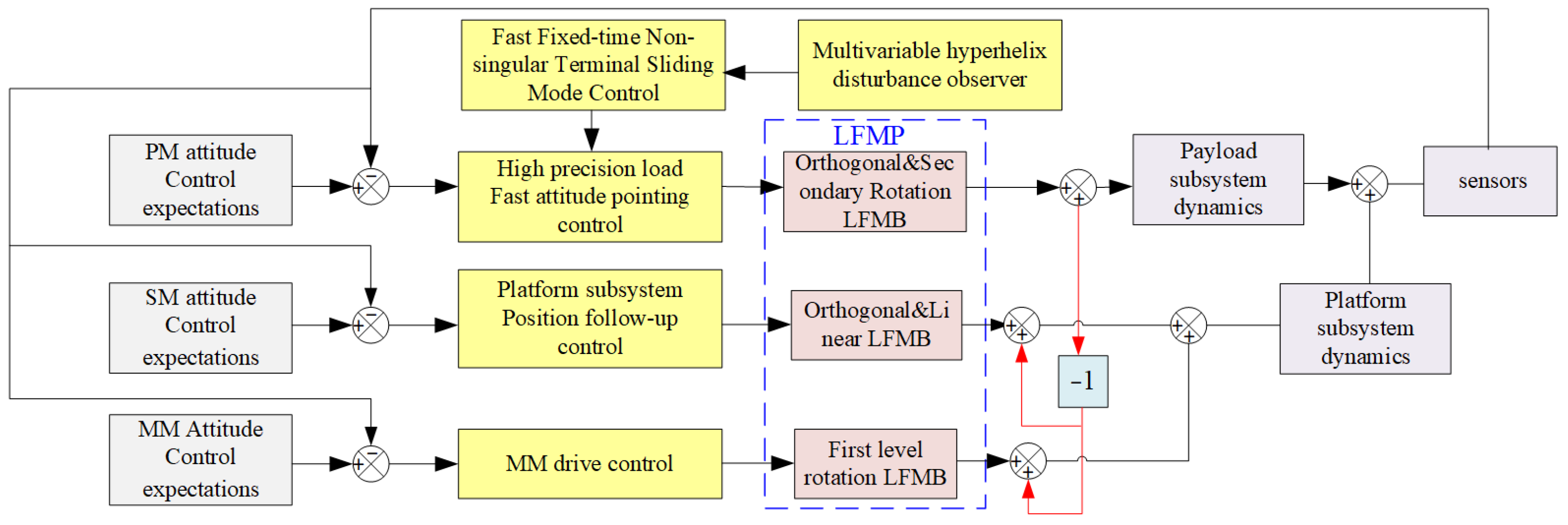
3. Design of Three Body Multi Closed Loop Control Law
3.1. Position Follow-Up Control Law of Platform Subsystem
3.2. Design of Payload-Centered Attitude Pointing Control Law
3.3. MM Driving Control Law
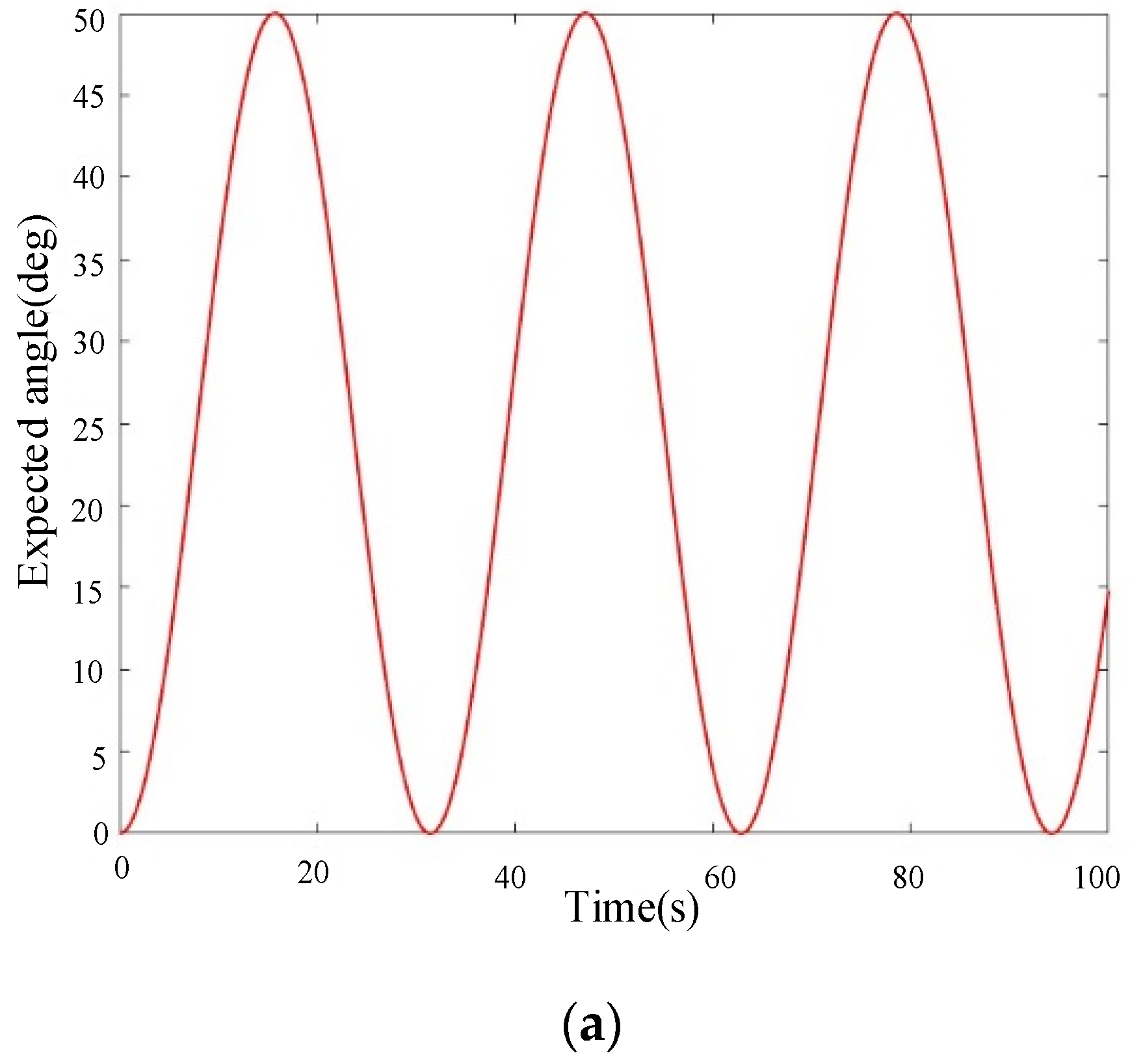
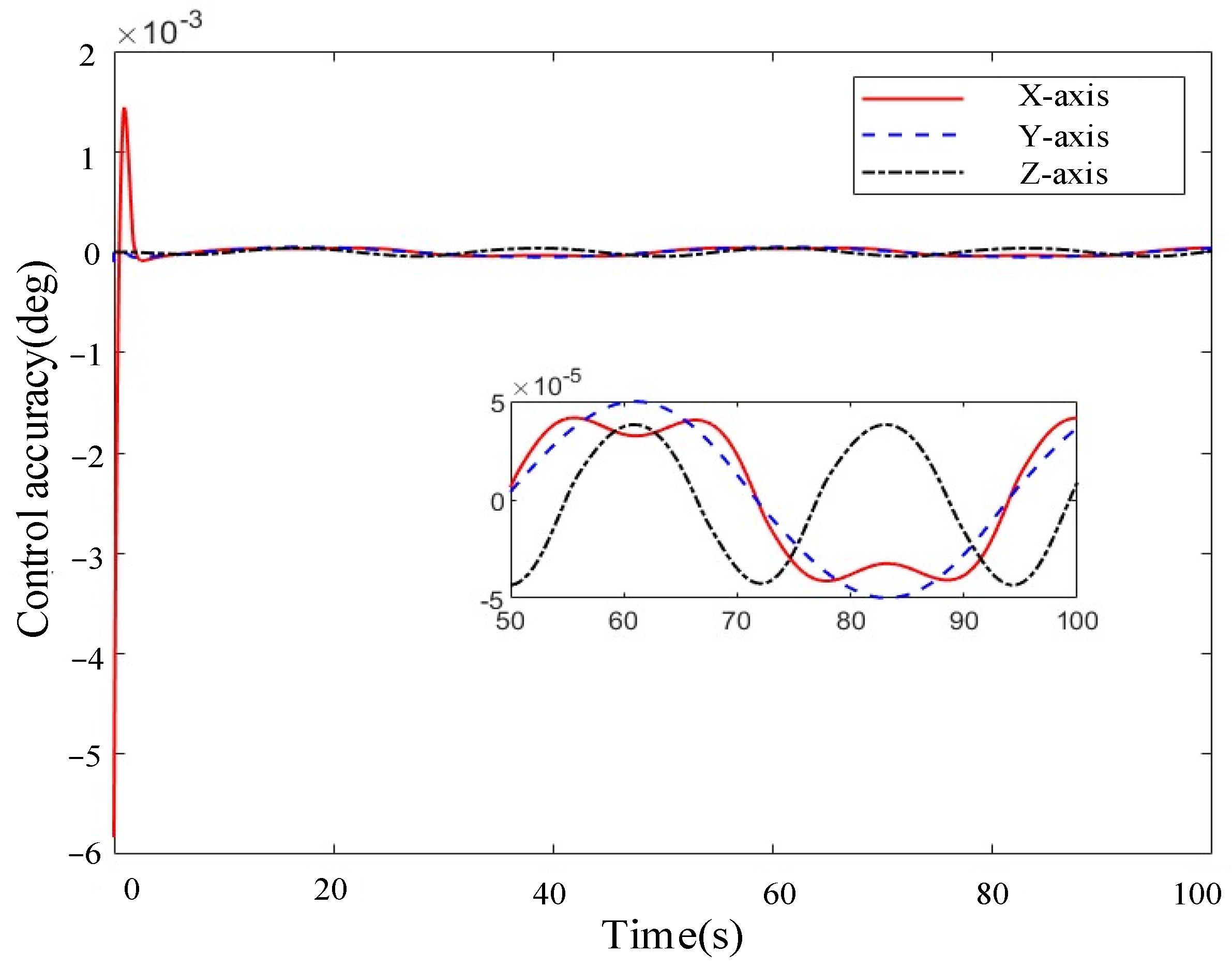
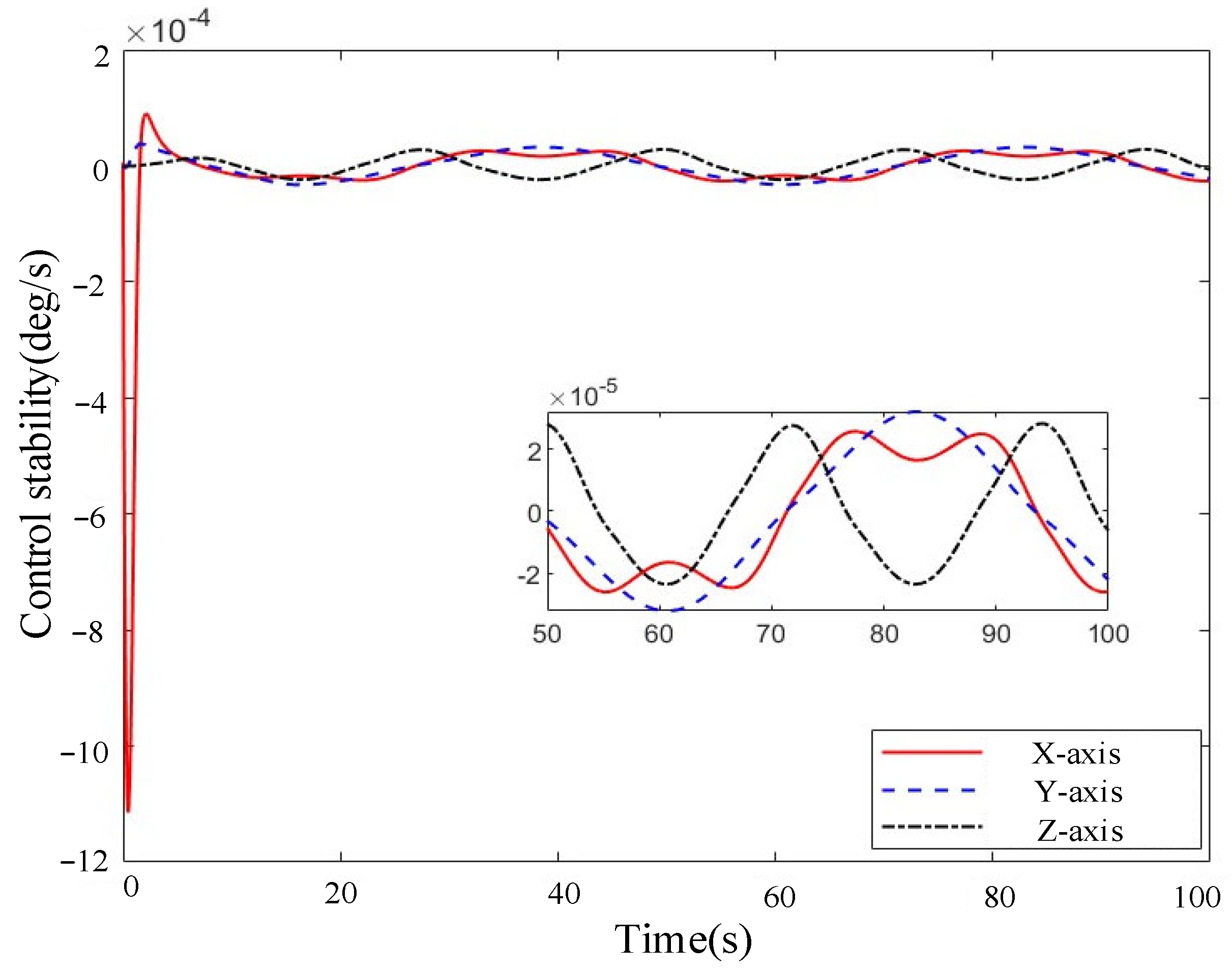
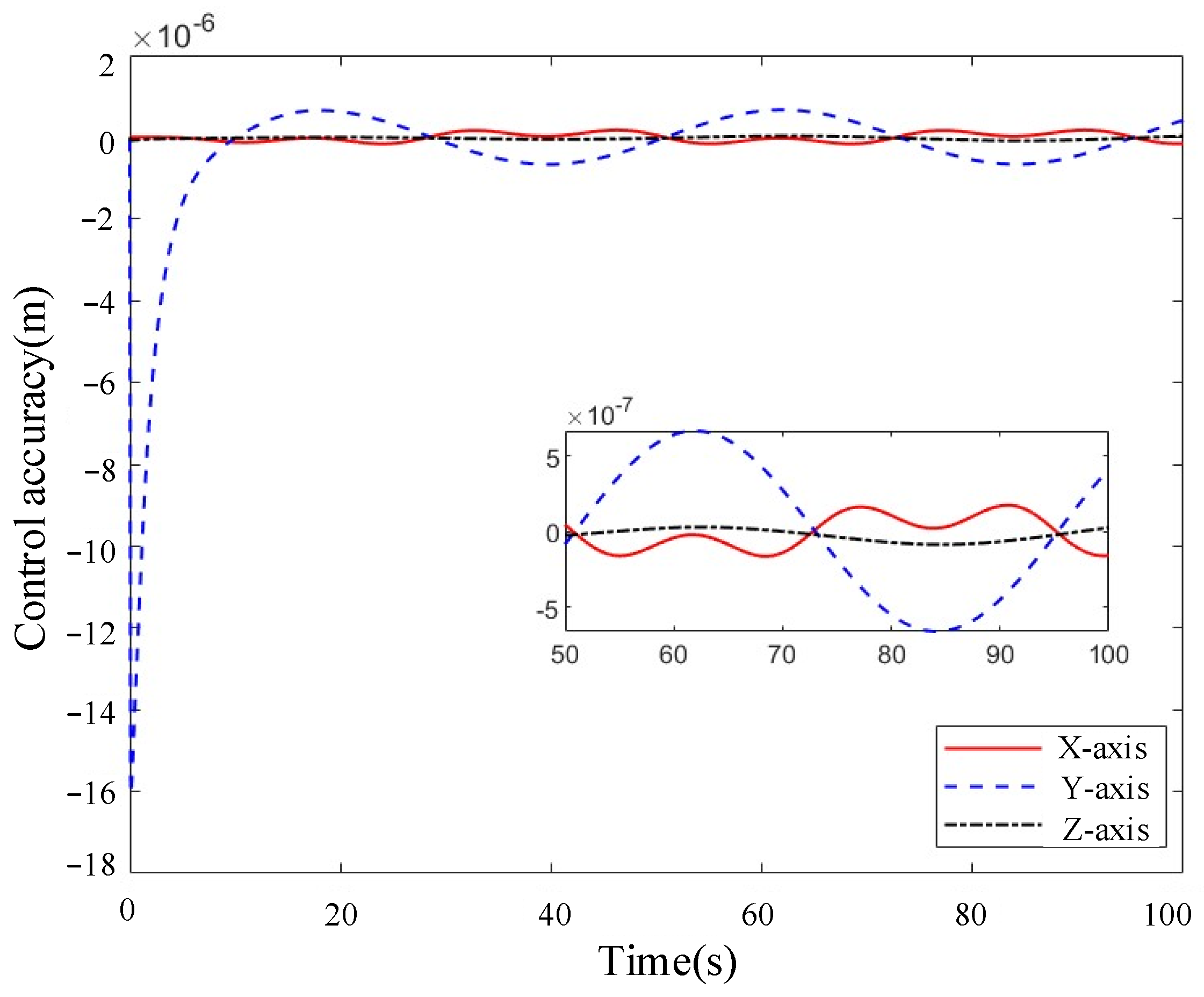
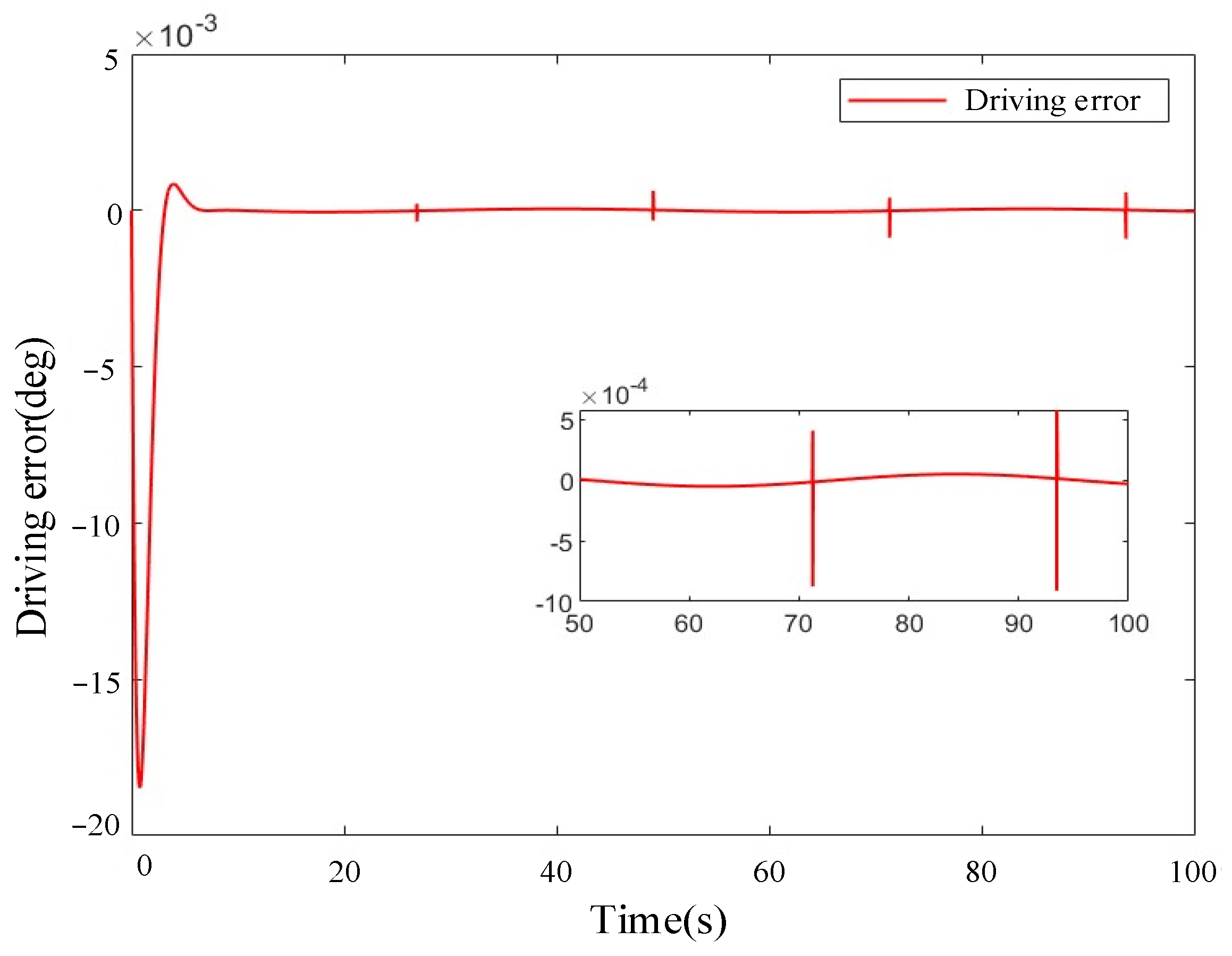
4. Simulation Results and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, L. Research on Active Vibration Isolation and Precise Directional Control Technology for Spacecraft. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2011. [Google Scholar]
- Liu, Q.; Wang, K.; Ren, Y.; Peng, P.; Ma, L.; Yin, Z. Novel repeatable launch locking/unlocking device for magnetically suspended momentum flywheel. Mechatronics 2018, 54, 16–25. [Google Scholar]
- Kalenova, V.I.; Morozov, V.M. Novel approach to attitude stabilization of satellite using geomagnetic Lorentz forces. Aerosp. Sci. Technol. 2020, 106, 106101–106105. [Google Scholar] [CrossRef]
- Zhu, H.; Teo, T.J.; Pang, C.K. Flexure-Based Magnetically Levitated Dual-Stage System for High-Bandwidth Positioning. IEEE Trans. Ind. Inform. 2019, 15, 4665–4675. [Google Scholar] [CrossRef]
- Labib, M.; Piontek, D.; Valsecchi, N.; Griffith, B.; Dejmek, M.; Jean, I.; Mailloux, M.; Palardy, R.; Michels, J.; Michalyna, C.; et al. The Fluid Science Laboratory’s Microgravity Vibration Isolation Subsystem Overview and Commissioning Update. In Proceedings of the SpaceOps 2010 Conference Delivering on the Dream, Huntsville, AL, USA, 25–30 April 2010; pp. 443–452. [Google Scholar]
- Basovich, S.; Arogeti, S.A.; Menaker, Y.; Brand, Z. Magnetically Levitated Six-DOF Precision Positioning Stage with Uncertain Payload. IEEE/ASME Trans. Mechatron. 2016, 21, 660–673. [Google Scholar] [CrossRef]
- Dyck, M.; Lu, X.; Altintas, Y. Magnetically Levitated Rotary Table with Six Degrees of Freedom. IEEE/ASME Trans. Mechatron. 2017, 22, 530–540. [Google Scholar] [CrossRef]
- Ahn, D.; Jin, J.; Yun, H.; Jeong, J. Development of a Novel Dual Servo Magnetic Levitation Stage. Actuators 2022, 11, 147. [Google Scholar] [CrossRef]
- Li, Z.F.; Liu, Q.; Ren, W.J. Dynamic modeling of active vibration isolation systems with high and micro gravity in space. Vib. Shock. 2010, 29, 1–4. [Google Scholar]
- Zhang, W.; Zhao, Y.B.; Liao, H.; Zhao, H.B. Design of a dual hypersatellite platform with dynamic and static isolation and master-slave collaborative control. Shanghai Aerosp. 2014, 31, 7–11. [Google Scholar]
- Zhao, J.; Yang, F. Technological Innovation and Application Practice of China’s High Resolution Agile Small Satellites. Spacecr. Eng. 2021, 30, 23–30. [Google Scholar]
- Yaseen, H.M.S.; Siffat, S.A.; Ahmad, I.; Malik, A.S. Nonlinear adaptive control of magnetic levitation system using terminal sliding mode and integral backstepping sliding mode controllers. ISA Trans. 2022, 126, 121–133. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbolic | Significance |
|---|---|
| The origin of the inertial frame points towards the center of mass of the platform subsystem | |
| The centroid of the platform subsystem points to a certain quality element on the platform | |
| The center of mass of the platform subsystem points towards the origin of the MM | |
| The origin of the MM system points to a certain mass element of the MM |
| Category | Platform-Centered Control Method | Payload-Centered Control Method |
|---|---|---|
| Payload attitude control expectation | Expected trajectory undergoes two-stage rotation | On the basis of ground orientation, two-stage rotation according to the expected trajectory |
| Payload measuring element | Non-contact eddy current sensor | Star sensors, gyroscopes, and position sensors |
| Satellite platform control expectations | Ground orientation (only unilateral posture) | Follow the movement of the payload (in terms of position and posture) |
| Category | Centroid Position/Attitude Quaternion | Quality (kg) | Moment of Inertia (kg × m2) |
|---|---|---|---|
| Satellite | |||
| Payload | |||
| SM | |||
| MM | |||
| PM |
| Parameters | Values | Parameters | Values |
|---|---|---|---|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Wang, W.; Wang, L. Multi-Body Dynamics Modeling and Simulation of Maglev Satellites. Appl. Sci. 2024, 14, 7588. https://doi.org/10.3390/app14177588
Li Z, Wang W, Wang L. Multi-Body Dynamics Modeling and Simulation of Maglev Satellites. Applied Sciences. 2024; 14(17):7588. https://doi.org/10.3390/app14177588
Chicago/Turabian StyleLi, Zongyu, Weijie Wang, and Lifen Wang. 2024. "Multi-Body Dynamics Modeling and Simulation of Maglev Satellites" Applied Sciences 14, no. 17: 7588. https://doi.org/10.3390/app14177588
APA StyleLi, Z., Wang, W., & Wang, L. (2024). Multi-Body Dynamics Modeling and Simulation of Maglev Satellites. Applied Sciences, 14(17), 7588. https://doi.org/10.3390/app14177588