
Analysis of the Forces and Moments in Canine Bodily Movement with Different Clear Aligners’ Extraction Space Designs

Abstract
:1. Introduction
2. Materials and Methods
2.1. Forces/Moments Measurement Apparatus Design and Fabrication
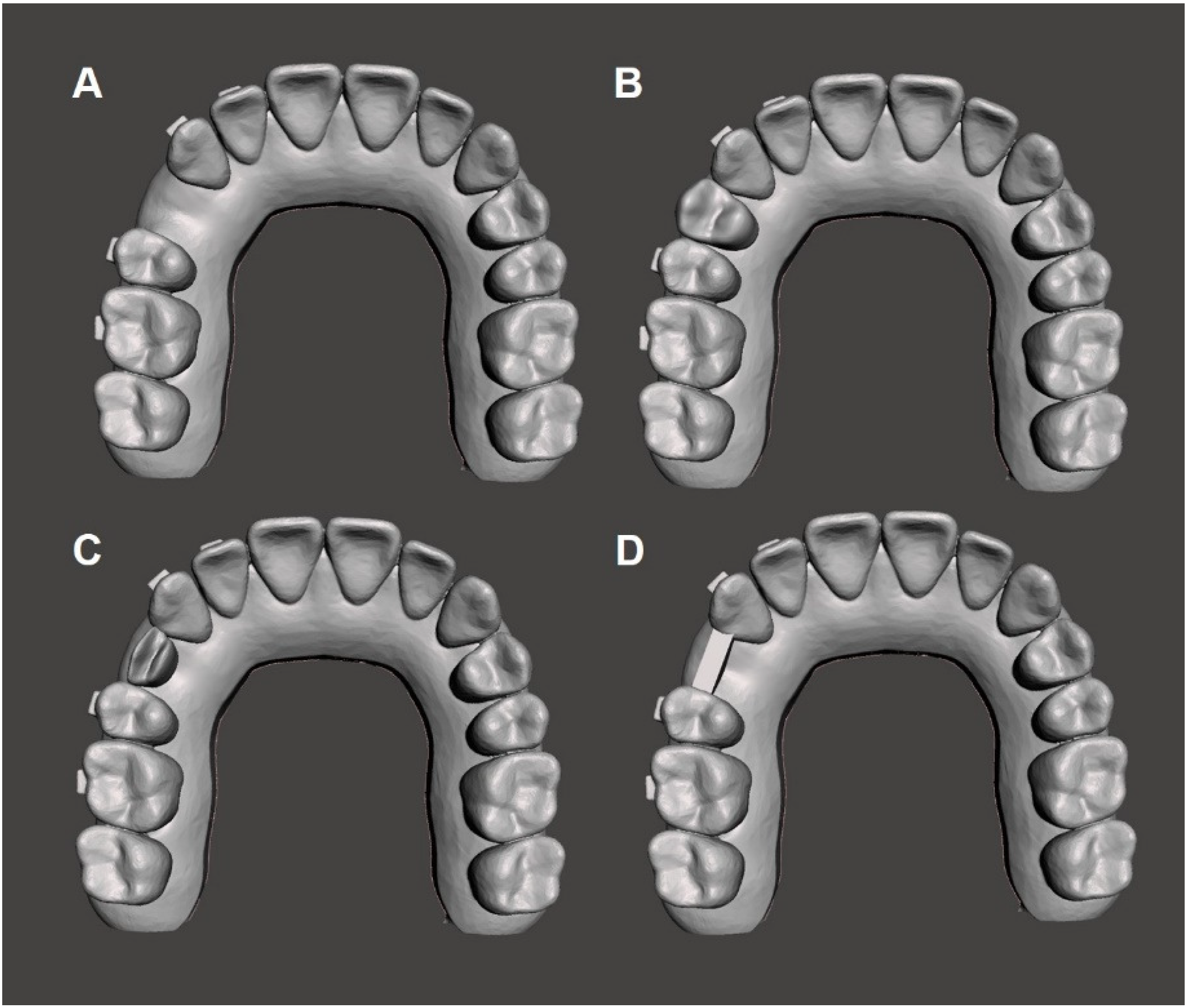
2.2. Design Modification and Fabrication of the Experimental CA for Distal Bodily Movement of the Maxillary Canine
2.3. Statistical Analysis
3. Results
3.1. Multi-Axis Forces and Moments
3.2. Total Sum of Forces on the X, Y, and Z Axes
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Noll, D.; Mahon, B.; Shroff, B.; Carrico, C.; Lindauer, S.J. Twitter analysis of the orthodontic patient experience with braces vs. Invisalign. Angle Orthod. 2017, 87, 377–383. [Google Scholar] [CrossRef] [PubMed]
- White, D.W.; Julien, K.C.; Jacob, H.; Campbell, P.M.; Buschang, P.H. Discomfort associated with Invisalign and traditional brackets: A randomized prospective trial. Angle Orthod. 2017, 87, 801–808. [Google Scholar] [CrossRef]
- Boyd, R.L. Esthetic orthodontic treatment using the Invisalign appliance for moderate to complex malocclusions. J. Dent. Educ. 2008, 72, 948–967. [Google Scholar] [CrossRef] [PubMed]
- Rossini, G.; Parrini, S.; Castroflorio, T.; Deregibus, A.; Debernardi, C.L. Efficacy of clear aligners in controlling orthodontic tooth movement: A systematic review. Angle Orthod. 2015, 85, 881–889. [Google Scholar] [CrossRef] [PubMed]
- Boyd, R.L.; Waskalic, V. Three-dimensional diagnosis and orthodontic treatment of complex malocclusions with the Invisalign appliance. Semin. Orthod. 2001, 7, 274–293. [Google Scholar] [CrossRef]
- Haouili, N.; Kravitz, N.D.; Vaid, N.R.; Ferguson, D.J.; Makki, L. Has Invisalign improved? A prospective follow-up study on the efficacy of tooth movement with Invisalign. Am. J. Orthod. Dentofac. Orthop. 2020, 158, 420–425. [Google Scholar] [CrossRef]
- Zhou, N.; Guo, J. Efficiency of upper arch expansion with the Invisalign system. Angle Orthod. 2020, 90, 23–30. [Google Scholar] [CrossRef]
- Kravitz, N.D.; Kusnoto, B.; BeGole, E.; Obrez, A.; Agran, B. How well does Invisalign work? A prospective clinical study evaluating the efficacy of tooth movement with Invisalign. Am. J. Orthod. Dentofac. Orthop. 2009, 135, 27–35. [Google Scholar] [CrossRef]
- Jiang, T.; Wu, R.Y.; Wang, J.K.; Wang, H.H.; Tang, G.H. Clear aligners for maxillary anterior en masse retraction: A 3D finite element study. Sci. Rep. 2020, 10, 10156. [Google Scholar] [CrossRef]
- Zhang, X.J.; He, L.; Guo, H.M.; Tian, J.; Bai, Y.X.; Li, S. Integrated three-dimensional digital assessment of accuracy of anterior tooth movement using clear aligners. Korean J. Orthod. 2015, 45, 275–281. [Google Scholar] [CrossRef]
- Djeu, G.; Shelton, C.; Maganzini, A. Outcome assessment of Invisalign and traditional orthodontic treatment compared with the American Board of Orthodontics objective grading system. Am. J. Orthod. Dentofac. Orthop. 2005, 128, 292–298. [Google Scholar] [CrossRef] [PubMed]
- Lombardo, L.; Arreghini, A.; Ramina, F.; Ghislanzoni, L.T.H.; Siciliani, G. Predictability of orthodontic movement with orthodontic aligners: A retrospective study. Prog. Orthod. 2017, 18, 35. [Google Scholar] [CrossRef] [PubMed]
- Bowman, S.J. Improving the predictability of clear aligners. Semin. Orthod. 2017, 23, 65–75. [Google Scholar] [CrossRef]
- Simon, M.; Keilig, L.; Schwarze, J.; Jung, B.A.; Bourauel, C. Forces and moments generated by removable thermoplastic aligners: Incisor torque, premolar derotation, and molar distalization. Am. J. Orthod. Dentofac. Orthop. 2014, 145, 728–736. [Google Scholar] [CrossRef]
- Baldwin, D.K.; King, G.; Ramsay, D.S.; Huang, G.; Bollen, A.M. Activation time and material stiffness of sequential removable orthodontic appliances. Part 3: Premolar extraction patients. Am. J. Orthod. Dentofac. Orthop. 2008, 133, 837–845. [Google Scholar] [CrossRef]
- Bichu, Y.M.; Alwafi, A.; Liu, X.; Andrews, J.; Ludwig, B.; Bichu, A.Y.; Zou, B. Advances in orthodontic clear aligner materials. Bioact. Mater. 2023, 22, 384–403. [Google Scholar] [CrossRef] [PubMed]
- Dai, F.F.; Xu, T.M.; Shu, G. Comparison of achieved and predicted tooth movement of maxillary first molars and central incisors: First premolar extraction treatment with Invisalign. Angle Orthod. 2019, 89, 679–687. [Google Scholar] [CrossRef]
- Cheng, Y.; Gao, J.; Fang, S.; Wang, W.; Ma, Y.; Jin, Z. Torque movement of the upper anterior teeth using a clear aligner in cases of extraction: A finite element study. Prog. Orthod. 2022, 23, 26. [Google Scholar] [CrossRef] [PubMed]
- Grant, J.; Foley, P.; Bankhead, B.; Miranda, G.; Adel, S.M.; Kim, K.B. Forces and moments generated by 3D direct printed clear aligners of varying labial and lingual thicknesses during lingual movement of maxillary central incisor: An in vitro study. Prog. Orthod. 2023, 24, 23. [Google Scholar] [CrossRef]
- Kojima, Y.; Fukui, H. Numerical simulation of canine retraction with T-loop spring based on the updated moment-to-force ratio. Eur. J. Orthod. 2012, 34, 10–18. [Google Scholar] [CrossRef]
- Gomez, J.P.; Peña, F.M.; Martínez, V.; Giraldo, D.C.; Cardona, C.I. Initial force systems during bodily tooth movement with plastic aligners and composite attachments: A three-dimensional finite element analysis. Angle Orthod. 2015, 85, 454–460. [Google Scholar] [CrossRef] [PubMed]
- Goto, M.; Yanagisawa, W.; Kimura, H.; Inou, N.; Maki, K. A method for evaluation of the effects of attachments in aligner-type orthodontic appliance: Three-dimensional finite element analysis. Orthod. Waves. 2017, 76, 207–214. [Google Scholar] [CrossRef]
- Kawamura, J.; Ojima, K.; Nanda, R. Effect of attachment type on distal bodily movement of the maxillary canine in aligner orthodontics: A finite element study. Angle Orthod. 2023, 93, 566–571. [Google Scholar] [CrossRef] [PubMed]
- Fan, Y.; Lv, X.; Wang, B.; An, L. Initial forces acting on the maxillary teeth with aligner activation of canine distalization on the basis of different initial canine tips in vitro. Am. J. Orthod. Dentofac. Orthop. 2023, 163, 867–873. [Google Scholar] [CrossRef]
- Proffit, W.R.; Fields, H.; Msd, D.M.; Larson, B.; Sarver, D. Contemporary Orthodontics, 6th ed.; Mosby Elsevier: Maryland Heights, MO, USA, 2018; pp. 254–256. [Google Scholar]
- Upadhyay, M.; Arqub, S.A. Biomechanics of clear aligners: Hidden truths & first principles. J. World Fed. Orthod. 2021, 11, 12–21. [Google Scholar]
- Elshazly, T.M.; Bourauel, C.; Aldesoki, M.; Ghoneima, A.; Abuzayda, M.; Talaat, W.; Talaat, S.; Keilig, L. Computer aided finite element model for biomechanical analysis of orthodontic aligners. Clin. Oral Investig. 2022, 27, 115–124. [Google Scholar] [CrossRef]
- Elshazly, T.M.; Bourauel, C.; Ismail, A.; Ghoraba, O.; Aldesoki, M.; Salvatori, D.; Elattar, H.; Alhotan, A.; Alkabani, Y. Effect of material composition and thickness of orthodontic aligners on the transmission and distribution of forces: An in vitro study. Clin. Oral Investig. 2024, 28, 258. [Google Scholar] [CrossRef]
- Hahn, W.; Dathe, H.; Fialka-Fricke, J.; Fricke-Zech, S.; Zapf, A.; Kubein-Meesenburg, D.; Sadat-Khonsari, R. Influence of thermoplastic appliance thickness on the magnitude of force delivered to a maxillary central incisor during tipping. Am. J. Orthod. Dentofac. Orthop. 2009, 136, 12.e1–12.e7. [Google Scholar] [CrossRef]
- Palone, M.; Longo, M.; Arveda, N.; Nacucchi, M.; Pascalis, F.D.; Spedicato, G.A.; Siciliani, G.; Lombardo, L. Micro-computed tomography evaluation of general trends in aligner thickness and gap width after thermoforming procedures involving six commercial clear aligners: An in vitro study. Korean J. Orthod. 2021, 51, 135–141. [Google Scholar] [CrossRef]
- Elshazly, T.M.; Salvatori, D.; Elattar, H.; Bourauel, C.; Keilig, L. Effect of trimming line design and edge extension of orthodontic aligners on force transmission: A 3D finite element study. J. Mech. Behav. Biomed. Mater. 2023, 140, 105741. [Google Scholar] [CrossRef]
- Cowley, D.P.; Mah, J.; O’Toole, B. The effect of gingival margin design on the retention of thermoformed aligners. J. Clin. Orthod. 2012, 46, 697. [Google Scholar]
- Elshazly, T.M.; Keilig, L.; Salvatori, D.; Chavanne, P.; Aldesoki, M.; Bourauel, C. Effect of trimming line design and edge extension of orthodontic aligners on force transmission: An in vitro study. J. Dent. 2022, 125, 104276. [Google Scholar] [CrossRef] [PubMed]
- Mehta, S.; Patel, D.; Yadav, S. Staging orthodontic aligners for complex orthodontic tooth movement. Turk. J. Orthod. 2021, 34, 202–206. [Google Scholar] [CrossRef] [PubMed]
- Feng, X.; Jiang, Y.; Zhu, Y.; Hu, L.; Wang, J.; Qi, Y.; Ma, S. Comparison between the designed and achieved mesiodistal angulation of maxillary canines and posterior teeth and influencing factors: First premolar extraction treatment with clear aligners. Am. J. Orthod. Dentofac. Orthop. 2022, 162, e63–e70. [Google Scholar] [CrossRef]
- Zhang, N.; Bai, Y.; Ding, X.; Zhang, Y. Preparation and characterization of thermoplastic materials for invisible orthodontics. Dent. Mater. J. 2011, 30, 954–959. [Google Scholar] [CrossRef] [PubMed]
- Ahn, H.W.; Kim, K.A.; Kim, S.H. A new type of clear orthodontic retainer incorporating multi-layer hybrid materials. Korean J. Orthod. 2015, 45, 268–272. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.S.; Chen, Y.T. Effect of thermoplastic appliance thickness on initial stress distribution in periodontal ligament. Adv. Mech. Eng. 2015, 7, 1687814015578362. [Google Scholar] [CrossRef]
- Min, S.; Hwang, C.J.; Yu, H.S.; Lee, S.B.; Cha, J.Y. The effect of thickness and deflection of orthodontic thermoplastic materials on its mechanical properties. Korean J. Orthod. 2010, 40, 16–26. [Google Scholar] [CrossRef]
- Jin, X.; Tian, X.; Lee, Z.H.; Zheng, Y.; Song, J.; Han, X. The effect of enhanced structure in the posterior segment of clear aligners during anterior retraction: A three-dimensional finite element and experimental model analysis. Prog. Orthod. 2024, 25, 3. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
| Component | Definition | Sign Convention |
|---|---|---|
| Force (X) | Buccolingual | (+) Buccal, (−) Lingual |
| Force (Y) | Mesiodistal | (+) Distal, (−) Mesial |
| Force (Z) | Occlusogingival | (+) Occlusal, (−) Gingival |
| Moment (X) | Angulation | (+) Mesial, (−) Distal |
| Moment (Y) | Inclination | (+) Buccal, (−) Lingual |
| Moment (Z) | Rotation | (+) Distal, (−) mesial |
| Groups | p-Value (ANOVA) | ||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | ||
| Measurements | |||||
| Fx (cN) | 20.09 ± 3.88 a | 6.38 ± 2.33 b | 7.28 ± 3.05 c | 4.42 ± 2.32 b | <0.001 *** |
| Fy | 1.94 ± 0.60 a | 3.43 ± 0.53 b | 1.20 ± 0.90 c | 5.67 ± 1.19 d | <0.001 *** |
| Fz | −22.53 ± 3.11 a | −10.65 ± 4.27 b | −11.30 ± 5.25 b | −14.13 ± 3.01 c | <0.001 *** |
| Vector: Sum of Forces | 30.25 a | 12.82 b | 13.50 b | 15.85 b | <0.001 *** |
| Mx (Nmm) | −7.66 ± 1.64 a | −0.22 ± 1.19 b | −2.16 ± 1.38 c | −5.57 ± 0.81 d | <0.001 *** |
| My | −17.41 ± 1.88 a | −4.78 ± 2.14 b | −12.91 ± 8.13 c | −14.61 ± 1.57 ac | <0.001 *** |
| Mz | −13.73 ± 2.13 a | −5.72 ± 1.06 b | −5.14 ± 2.95 b | −2.72 ± 0.85 c | <0.001 *** |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, Y.-K.; Kim, S.-H.; Park, H.R.; Kim, S.-S.; Kim, Y.-I. Analysis of the Forces and Moments in Canine Bodily Movement with Different Clear Aligners’ Extraction Space Designs. Appl. Sci. 2024, 14, 7619. https://doi.org/10.3390/app14177619
Choi Y-K, Kim S-H, Park HR, Kim S-S, Kim Y-I. Analysis of the Forces and Moments in Canine Bodily Movement with Different Clear Aligners’ Extraction Space Designs. Applied Sciences. 2024; 14(17):7619. https://doi.org/10.3390/app14177619
Chicago/Turabian StyleChoi, Youn-Kyung, Sung-Hun Kim, Hae Ryoun Park, Seong-Sik Kim, and Yong-Il Kim. 2024. "Analysis of the Forces and Moments in Canine Bodily Movement with Different Clear Aligners’ Extraction Space Designs" Applied Sciences 14, no. 17: 7619. https://doi.org/10.3390/app14177619