
Study on the Effect of Operating Conditions on the Friction Pair Gap in a Wet Multi-Disc Clutch in a Helicopter Transmission System

 ,
,
Abstract
1. Introduction
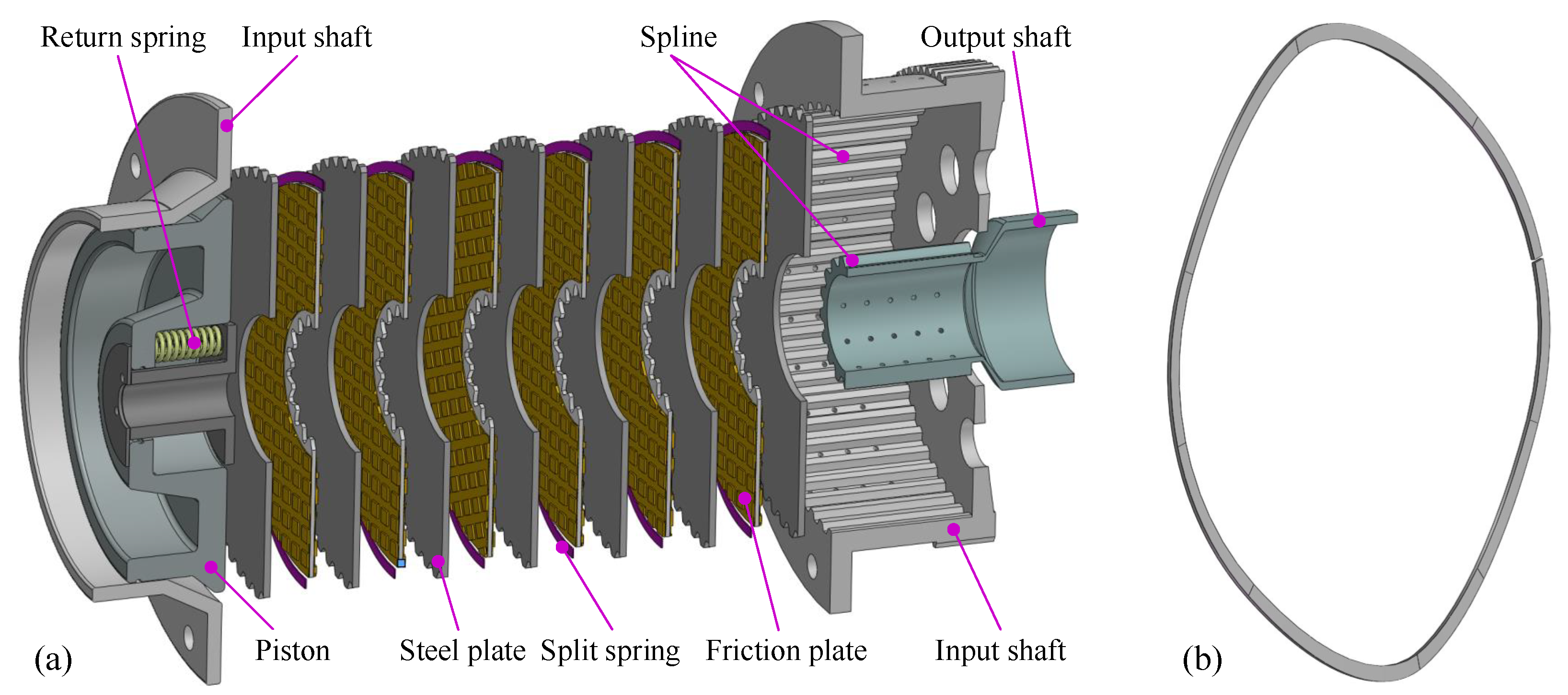
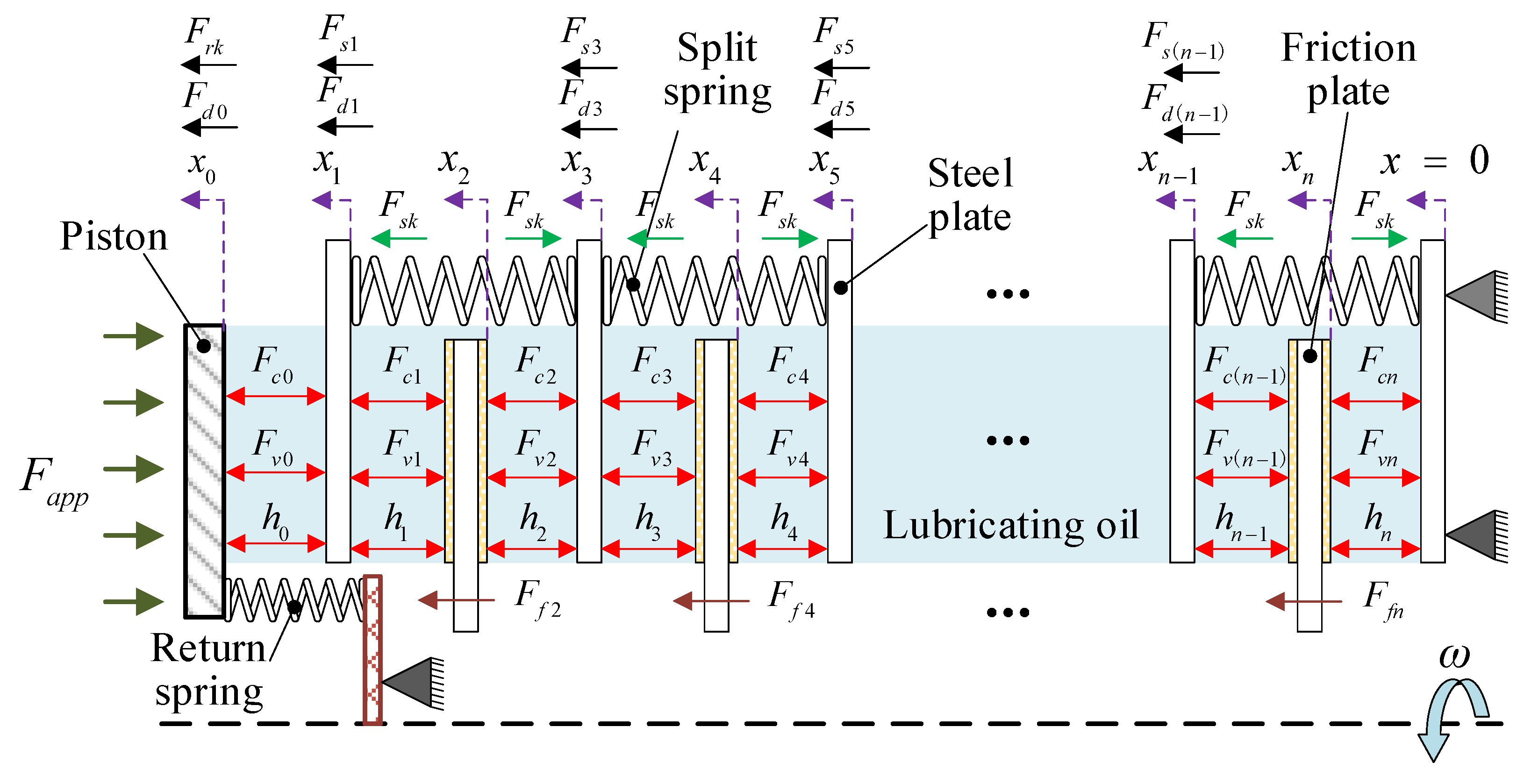
2. Mathematical Model of Multi-Disc Wet Clutch
2.1. Piston and Friction Components Axial Kinetic Model
2.2. Lubrication Model of Friction Pair
2.3. Friction Pair Asperity Contact Model
2.4. Torque Balance Model
3. Numerical Simulation
3.1. Simulation Parameters and Solution
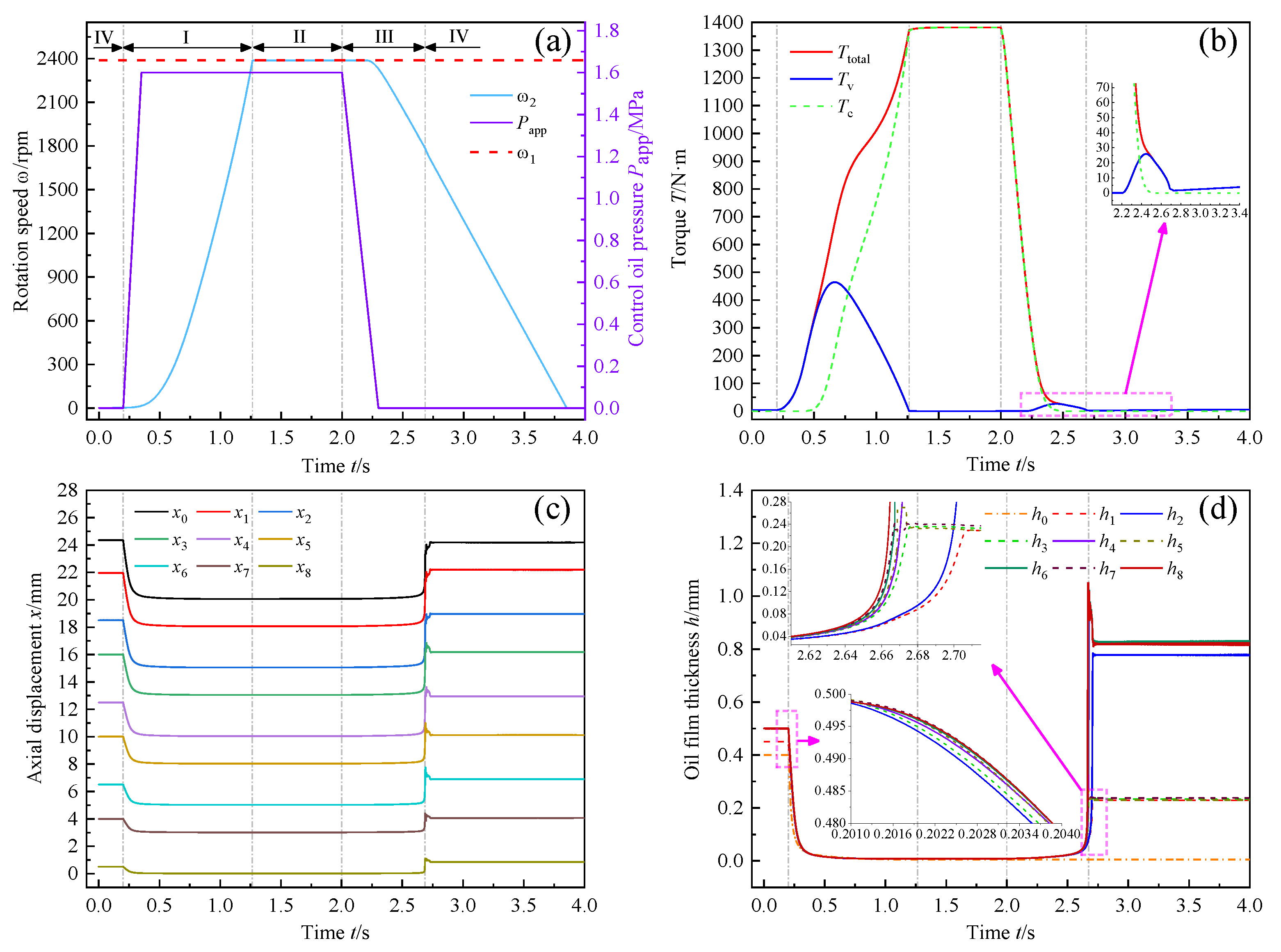
3.2. Dynamic Response of Wet Friction Clutch
4. Results and Analysis
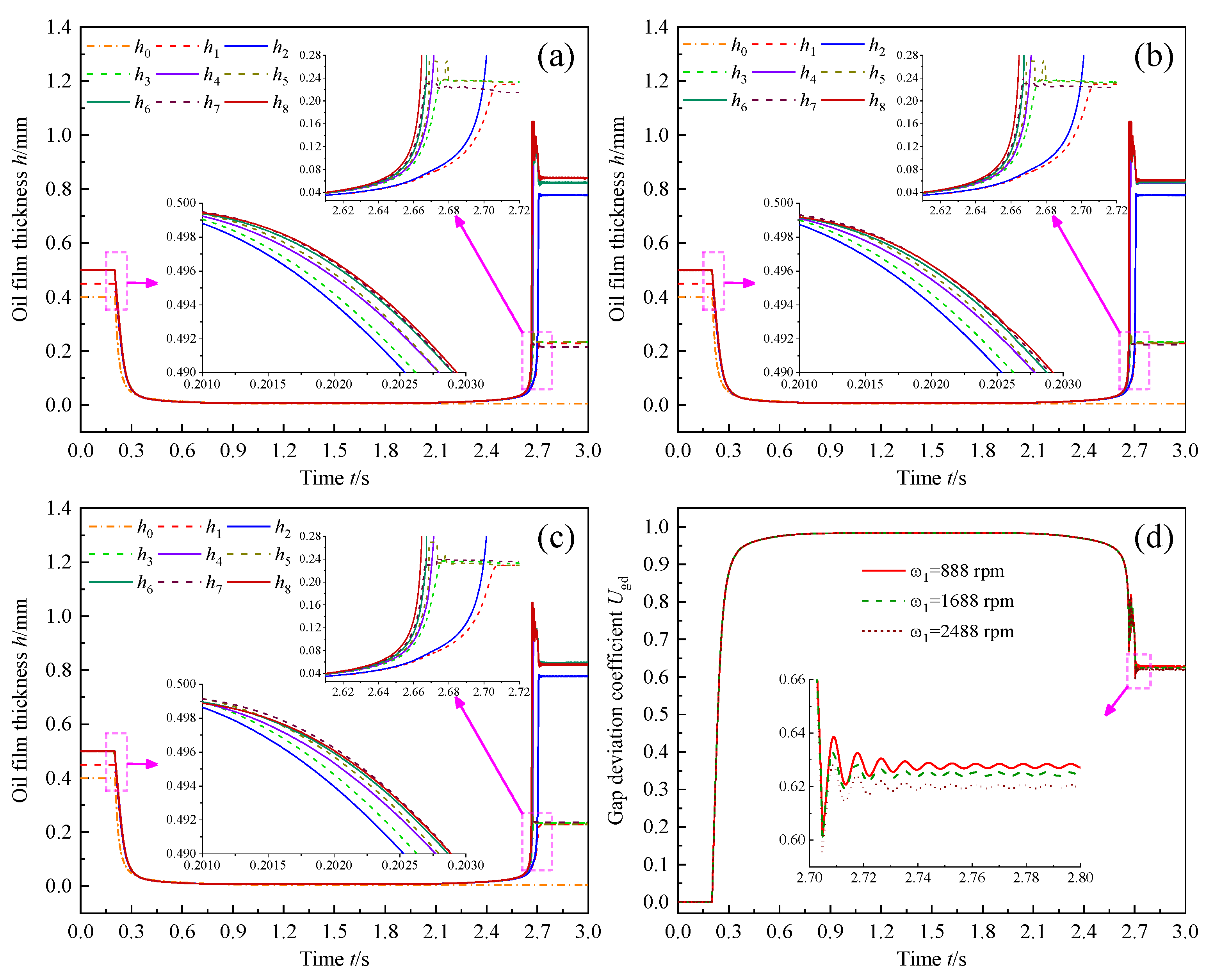
4.1. Rotation Speed
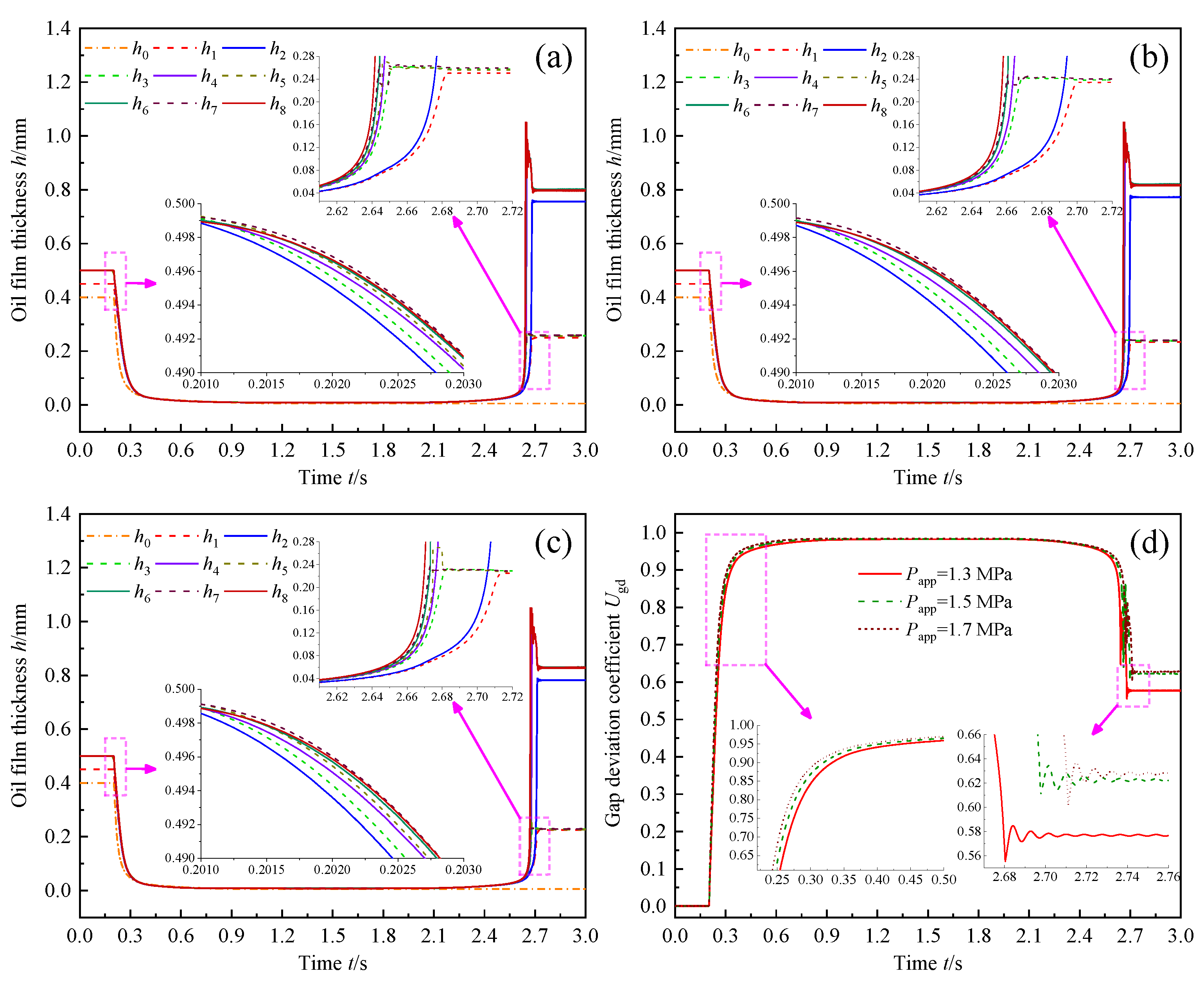
4.2. Control Oil Pressure
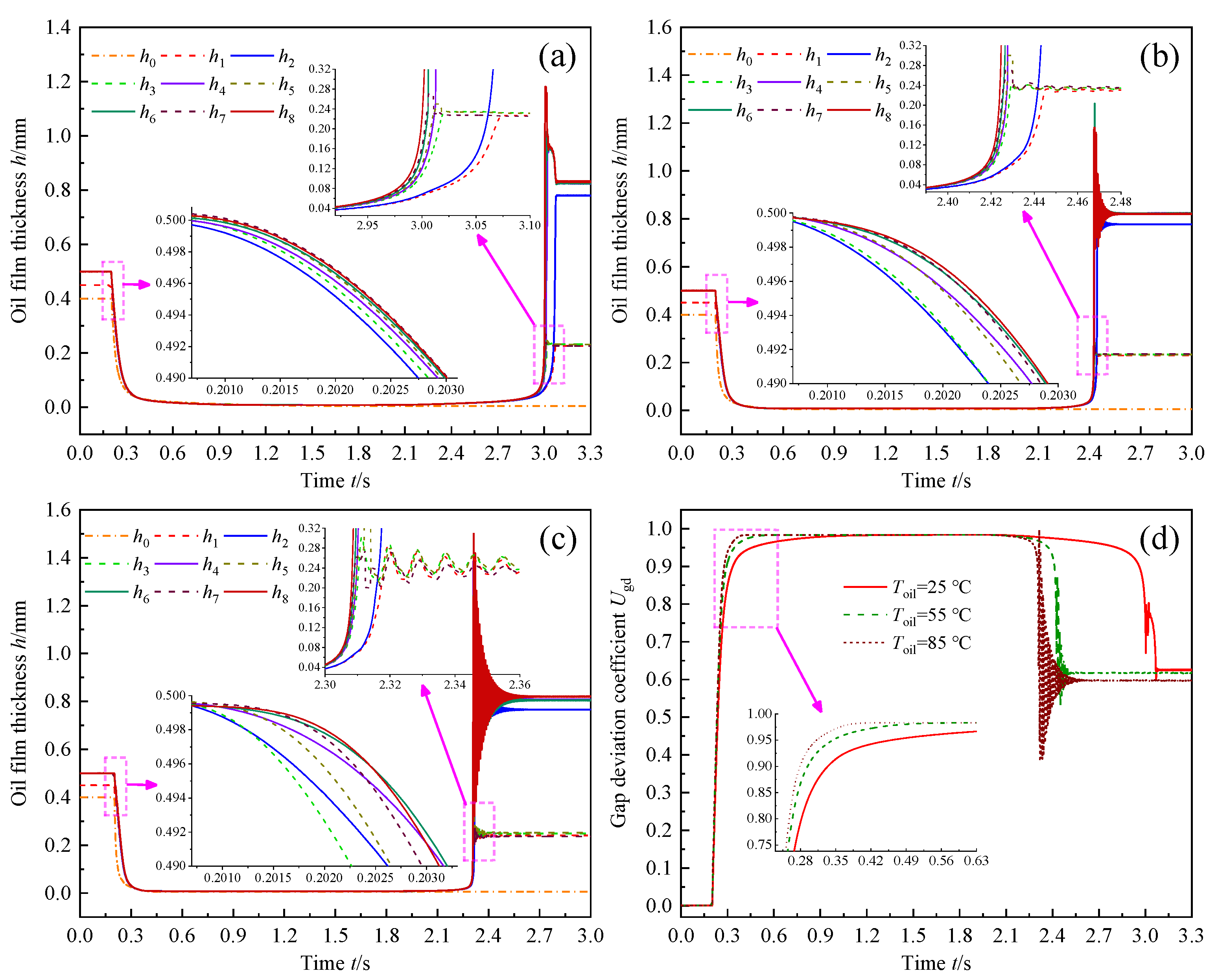
4.3. Lubricant Oil Temperature
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bao, H.; Kong, W.D.; Hou, X.N.; Zhu, R.P. Analysis on temperature field of friction pair of aviation friction clutch based on different groove shapes of friction disk. J. Mech. Sci. Technol. 2021, 35, 3735–3742. [Google Scholar] [CrossRef]
- Li, M.; Khonsari, M.M.; McCarthy, D.M.C.; Lundin, J. Parametric analysis for a paper-based wet clutch with groove consideration. Tribol. Int. 2014, 80, 222–233. [Google Scholar] [CrossRef]
- Bao, H.Y.; Huang, W.; Lu, F.X. Investigation of engagement characteristics of a multi-disc wet friction clutch. Tribol. Int. 2021, 159, 106940. [Google Scholar]
- Leister, R.; Najafi, A.F.; Gatti, D.; Kriegseis, J.; Frohnapfel, B. Non-dimensional characteristics of open wet clutches for advanced drag torque and aeration predictions. Tribol. Int. 2020, 152, 106442. [Google Scholar] [CrossRef]
- Wang, P.C.; Katopodes, N.; Fujii, Y. Statistical modeling of plate clearance distribution for wet clutch drag analysis. SAE. Int. J. Passen. Car. 2018, 11, 76–88. [Google Scholar] [CrossRef]
- Yu, L.; Ma, B.; Chen, M.; Li, H.Y.; Liu, J.K.; Zheng, L.J. Numerical and experimental studies on the characteristics of friction torque based on wet paper-based clutches. Tribol. Int. 2019, 131, 541–553. [Google Scholar] [CrossRef]
- Yu, L.; Ma, B.; Chen, M.; Xue, J.; Zhao, P. Variation mechanism of the friction torque in a Cu-based wet clutch affected by operating parameters. Tribo. Int. 2020, 147, 106169. [Google Scholar] [CrossRef]
- Yu, L.; Ma, B.; Chen, M.; Li, H.Y.; Liu, J.K. Experimental study on the friction stability of paper-based clutches concerning groove patterns. Ind. Lubr. Tribol. 2020, 72, 541–548. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhu, L.C.; Zheng, X.D. Simulations versus tests for dynamic engagement characteristics of wet clutch. Cogn. Robot. 2021, 1, 125–133. [Google Scholar] [CrossRef]
- Wu, P.H.; Xu, J.; Zhou, X.J. Numerical and experimental research on engagement process of wet multi-plate friction clutches with groove consideration. Proc. Inst. Mech. Eng. Part J. Eng. Tribol. 2019, 233, 1464–1482. [Google Scholar] [CrossRef]
- Zhang, Z.G.; Zou, L.; Liu, H.; Feng, J.; Chen, Z.G. Response Characteristics of Dynamic Torque for Wet Clutch Engagement: A Numerical and Experimental Study. Shock. Vib. 2021, 23021, 5522998. [Google Scholar] [CrossRef]
- Zhang, Z.G.; Zou, L.; Qing, H. Analysis of Factors Affecting Vibration During Wet Clutch Engagement. IEEE Access 2021, 9, 34298–34306. [Google Scholar] [CrossRef]
- Wang, Y.Z.; Li, Y.; Liu, Y.; Zhang, W. Modeling and experimental research on engaging characteristics of wet clutch. Ind. Lubr. Tribol. 2019, 71, 94–101. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, K.; Wu, X.Y. Structural design and friction performance test of a new conical groove friction disks in wet clutch. Appl. Sci. 2021, 11, 7231. [Google Scholar] [CrossRef]
- Bao, H.Y.; Zhang, C.; Hou, X.N.; Lu, F.X. Wear characteristics of different groove-shaped friction pairs of a friction clutch. Appl. Sci. 2021, 11, 284. [Google Scholar] [CrossRef]
- Yang, X.G.; Bao, H.Y.; Zhang, C.; Tan, W.Z.; Zhu, R.P. Influence of Groove Type on Friction Coefficient of Wet Friction Clutch Pair. Int. J. Automot. Technol. 2024, 25, 13–21. [Google Scholar] [CrossRef]
- Wu, B.Z.; Qin, D.T.; Hu, J.J.; Wang, X.; Wang, Y.; Lv, H. Analysis of influencing factors and changing laws on friction behavior of wet clutch. Tribol. Int. 2021, 162, 107125. [Google Scholar] [CrossRef]
- Wu, B.Z.; Qin, D.T.; Hu, J.J.; Liu, Y.G. Experimental data mining research on factors influencing friction coefficient of wet clutch. J. Tribol. 2021, 143, 121802. [Google Scholar] [CrossRef]
- Wang, Q.; Ma, B.; Yu, L.; Xiong, C.B.; Zheng, L.J. Effects of operating conditions on the tribological behavior of a wet multi-disc clutch during the running-in process. Tribol. Int. 2023, 179, 108096. [Google Scholar] [CrossRef]
- Chen, M.; Zhang, B.; Feng, Y.Q.; Wang, L.; Wang, H. Numerical and Experimental Studies of the Attenuation Characteristics of Friction Torque in a Wet Multidisc Clutch. Appl. Sci. 2021, 11, 814. [Google Scholar] [CrossRef]
- Zheng, L.J.; Ma, B.; Chen, M.; Yu, L.; Xue, J.Q. Numerical studies on the dynamic characteristics of a wet multi-disc clutch during the disengaging process. J. Mech. Sci. Technol. 2022, 36, 3277–3289. [Google Scholar] [CrossRef]
- Niu, Y.K.; Bao, H.Y.; Huang, W.; Tan, W.Z.; Peng, Z. Dynamics modeling and simulation analysis of wet clutch considering spline pair. Ind. Lubr. Tribol. 2023, 75, 866–874. [Google Scholar] [CrossRef]
- Pointner-Gabriel, L.; Schermer, E.; Schneider, T.; Stahl, K. Experimental analysis of oil flow and drag torque generation in disengaged wet clutches. Sci. Rep. 2023, 13, 17193. [Google Scholar] [CrossRef] [PubMed]
- Mahmud, S.F.; Pahlovy, S.; Kubota, M.; Ogawa, M.; Tajajura, N. A Simulation Model for Predicting High Speed Torque Jump Up Phenomena of Disengaged Transmission Wet Clutch; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2017. [Google Scholar]
- Goszczak, J.; Leyko, J.; Mitukiewicz, G.; Batory, D. Experimental Study of Drag Torque between Wet Clutch Discs. Appl. Sci. 2022, 12, 3900. [Google Scholar] [CrossRef]
- Gürbüz, H.; Schulz, J.; Kücükay, F.; Elard, F.S.; Ott, S. Significant Drag Torque Reduction and Improved Clutch Dynamics by Innovative, Very Compact Separating Springs for Wet Clutches; Springer: Berlin/Heidelberg, Germany, 2021; pp. 177–190. [Google Scholar]
- Wang, H.P.; Zhu, C.; Yang, X.G.; Niu, Y.K.; Bao, H.Y.; Zhu, R.P. Study on the engagement characteristics of wet multi-plate friction clutch based on separating spring. Forsch. Ingenieurwes. 2024, 88, 3. [Google Scholar] [CrossRef]
- Patir, N.; Cheng, H.S. An Average Flow Model for Determining Effects of Three-dimensional Toughness on Partial Hydrodynamic Lubrication. J. Lubr. Technol. 1979, 100, 12–17. [Google Scholar] [CrossRef]
- Kogut, L.; Etsion, I. A finite element based elastic-plastic model for the contact of rough surfaces. Tribol. Trans. 2003, 46, 383–390. [Google Scholar] [CrossRef]
- Zhao, E.H.; Ma, B.; Li, H.Y. Numerical and experimental studies on tribological behaviors of Cu-based friction pairs from hydrodynamic to boundary lubrication. Tribol. Trans. 2018, 61, 347–356. [Google Scholar] [CrossRef]
- Houpert, L. New results of traction force calculations in elastohydrodynamic contacts. J. Tribol. 1985, 107, 241–245. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Outer radius of friction pairs | 0.094 m | Inertia of output shaft | 0.3 kg·m2 |
| Outer radius of friction pairs | 0.06 m | Thickness of friction plate | 0.003 m |
| Number of friction pairs n | 8 | Thickness of steel plate | 0.002 m |
| Return spring stiffness | 1.52 × 106 N·m−1 | Asperities density | 7 × 107 m−2 |
| Input rotation speed | 2388 rpm | Asperities radius R | 8 × 10−4 m |
| Control oil pressure | 1.6 MPa | RMS roughness | 8.41 × 10−6 m |
| Initial gap of friction pairs | 5 × 10−4 m | Equivalent Young’ modulus | 4.7 × 109 Pa |
| Resistance torque | 460 N·m | Non-groove area coefficient | 0.78 |
| Permeability | 4 × 10−13 m2 | Friction material thickness | 0.001 m |
| Mass of friction plate | 0.6 kg | Mass of piston | 3 kg |
| Mass of steel plate | 0.45 kg | Lubricant oil density | 875 kg·m−3 |
| Spline friction coefficient | 0.1 | Damping coefficient | 0.08 N·s·m−1 |
| Rotation Speed/rpm | Engagement Time/s | Disengagement Time/s | Gap Deviation Coefficient |
|---|---|---|---|
| 888 | 0.8789 | 2.7044 | 0.6267 |
| 1688 | 1.0882 | 2.7053 | 0.6238 |
| 2488 | 1.3126 | 2.7065 | 0.6198 |
| Oil Pressure/MPa | Engagement Time/s | Disengagement Time/s | Gap Deviation Coefficient |
|---|---|---|---|
| 1.3 | 1.4590 | 2.6864 | 0.5774 |
| 1.5 | 1.3878 | 2.6981 | 0.6228 |
| 1.7 | 1.2389 | 2.7109 | 0.6270 |
| Oil Temperature/°C | Engagement Time/s | Disengagement Time/s | Gap Deviation Coefficient |
|---|---|---|---|
| 25 | 1.3536 | 3.0698 | 0.6255 |
| 55 | 1.3687 | 2.4370 | 0.6179 |
| 85 | 1.4617 | 2.3196 | 0.5977 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Yan, H.; Wei, D.; Wu, J.; Yin, M.; Xiao, Y.; Li, K. Study on the Effect of Operating Conditions on the Friction Pair Gap in a Wet Multi-Disc Clutch in a Helicopter Transmission System. Appl. Sci. 2024, 14, 7751. https://doi.org/10.3390/app14177751
Li X, Yan H, Wei D, Wu J, Yin M, Xiao Y, Li K. Study on the Effect of Operating Conditions on the Friction Pair Gap in a Wet Multi-Disc Clutch in a Helicopter Transmission System. Applied Sciences. 2024; 14(17):7751. https://doi.org/10.3390/app14177751
Chicago/Turabian StyleLi, Xiaokang, Hongzhi Yan, Dahuan Wei, Jiangming Wu, Mei Yin, Yexin Xiao, and Kefeng Li. 2024. "Study on the Effect of Operating Conditions on the Friction Pair Gap in a Wet Multi-Disc Clutch in a Helicopter Transmission System" Applied Sciences 14, no. 17: 7751. https://doi.org/10.3390/app14177751
APA StyleLi, X., Yan, H., Wei, D., Wu, J., Yin, M., Xiao, Y., & Li, K. (2024). Study on the Effect of Operating Conditions on the Friction Pair Gap in a Wet Multi-Disc Clutch in a Helicopter Transmission System. Applied Sciences, 14(17), 7751. https://doi.org/10.3390/app14177751