

Control System Hardware Design, Analysis and Characterization of Electromagnetic Diaphragm Pump



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The design of an electromagnetic pump diaphragm, including the control system based on the Arduino platform;
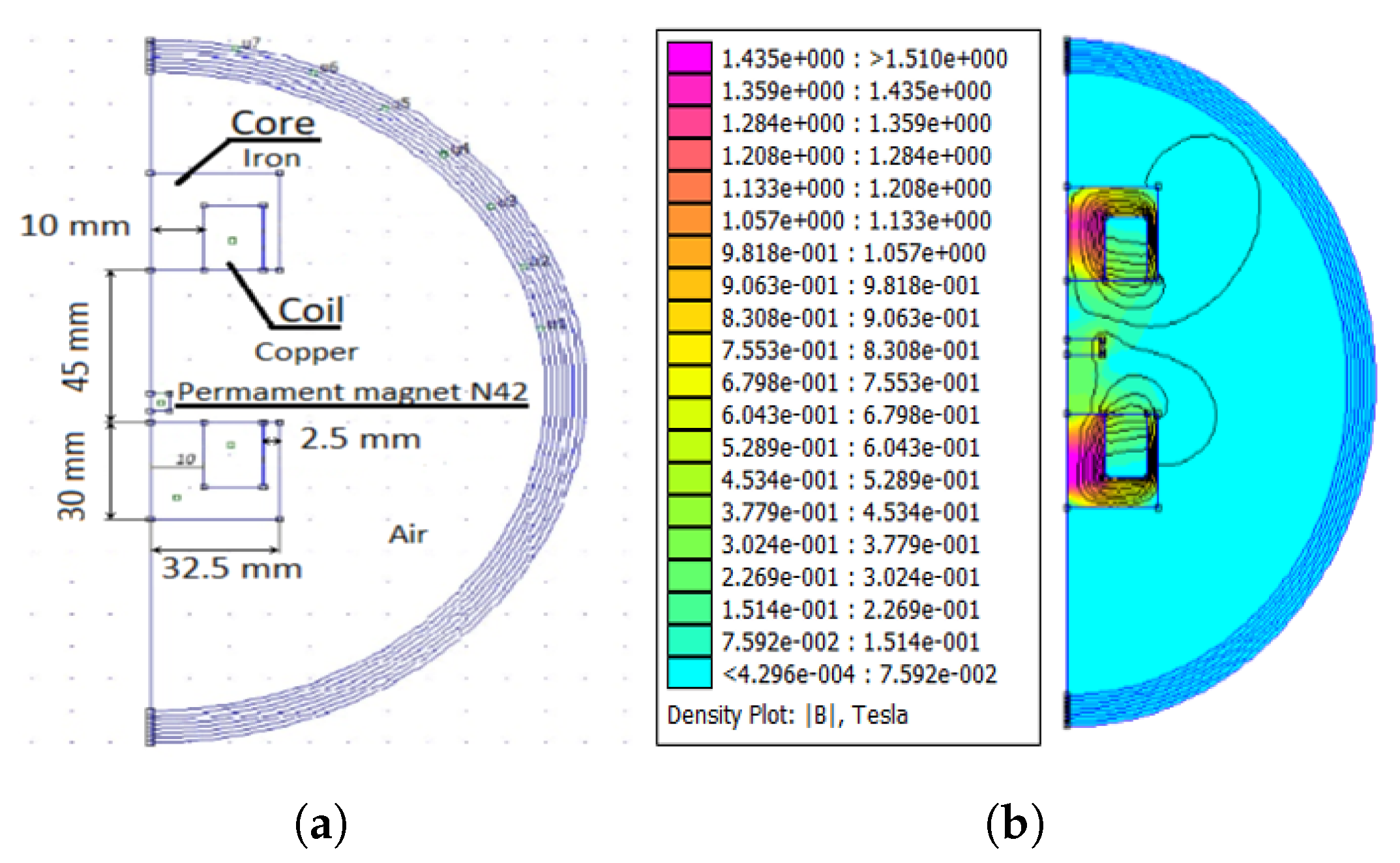
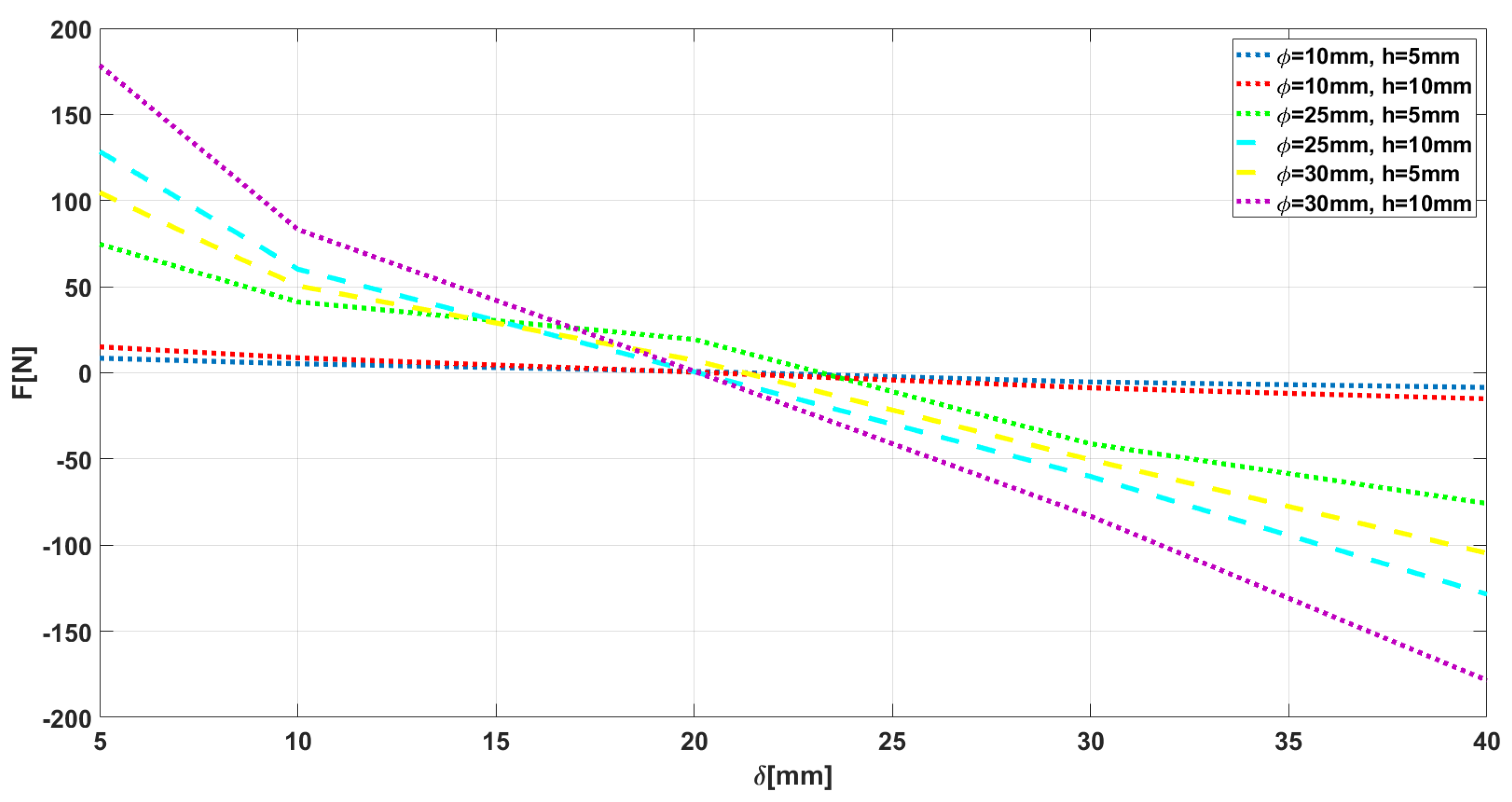
- The simulations and calculations performed using the FEMM program for the analysis and distribution of the magnetic field and the force generated inside the pump;
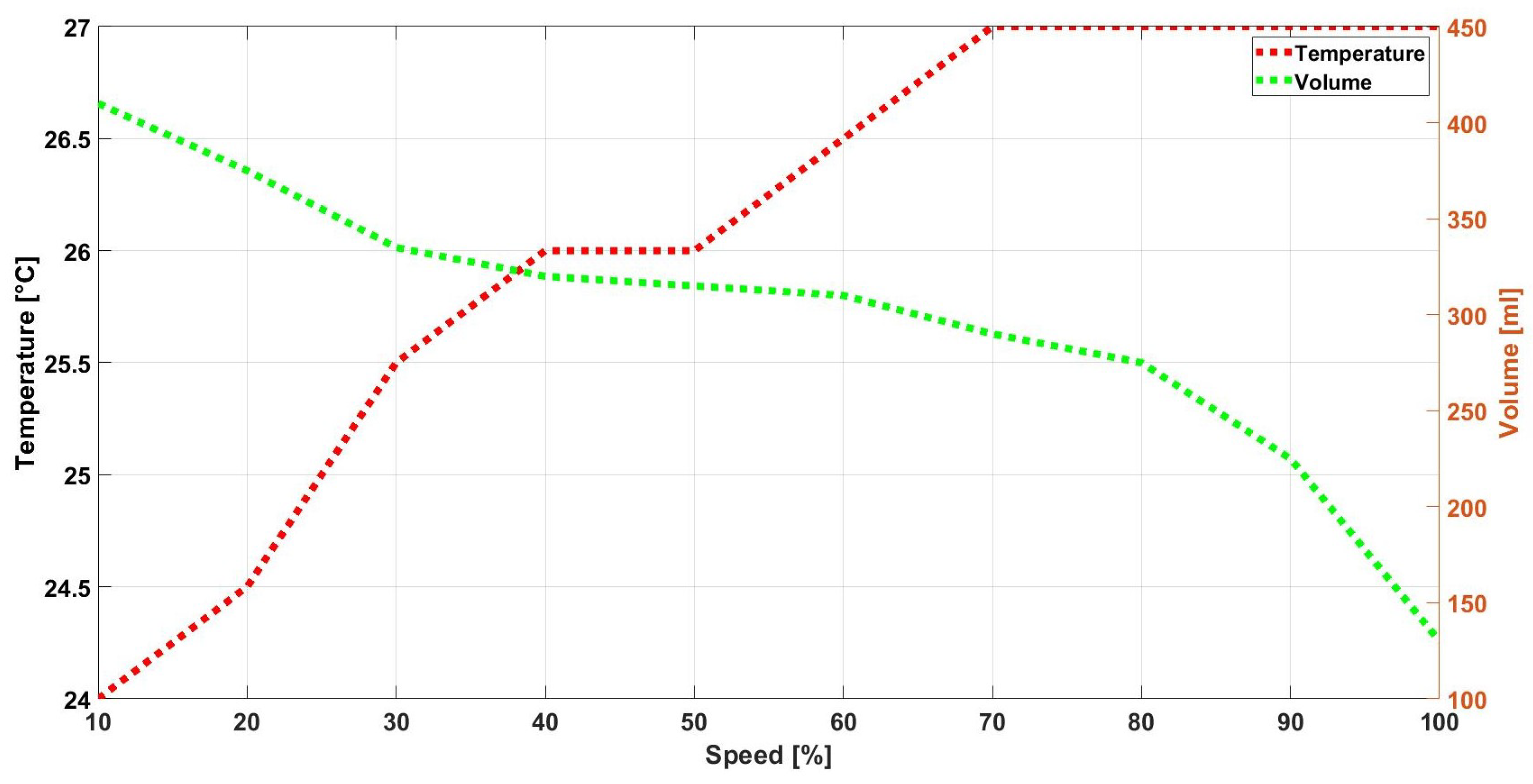
- The measurements of the temperature of the electromagnetic pump, the liquid volume, and pump speed were conducted.
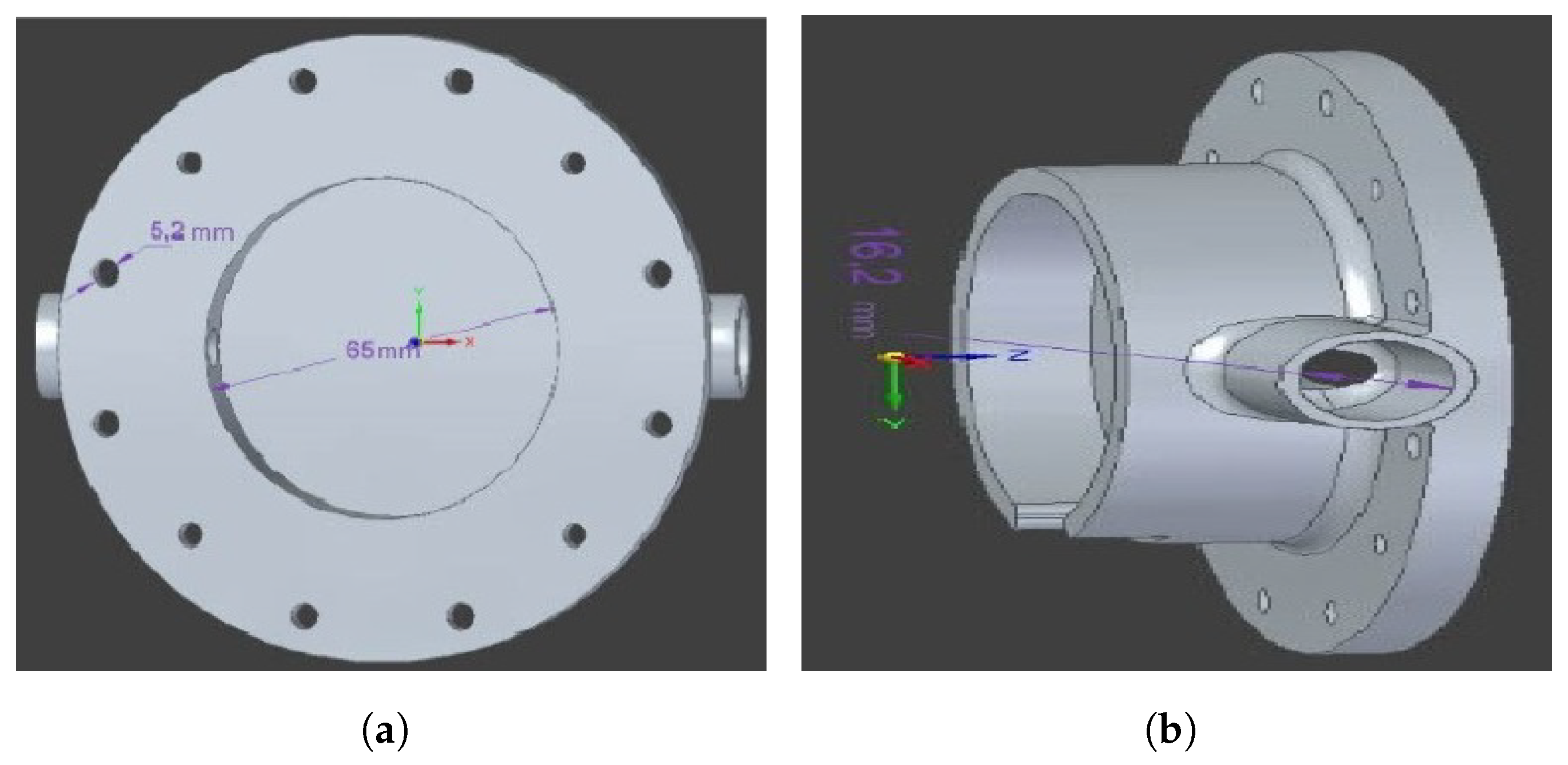
2. Design and Structure of Electromagnetic Pump
2.1. Electromagnetic Pump Description
- Opening of the suction valve;
- Medium suction;
- Medium compression of air;
- Opening of the discharge valve;
- Compressed medium outlet.
2.2. Technology and Hardware in the Electromagnetic Diaphragm Pump
2.3. Control System and Microcontroller and Design of the Control System as a PCB
- Arduino NANO (Controller Nano V3.0 ATmega328P created by Atmel, Headquarters San Jose, CA, USA);
- PCB boards (EZ-Stream, China);
- Nextion touch display (3rd Flr, Bld A, International Import Expo Hall, No. 663, Bulong Rd, Longgang Dist, Shenzhen, China);
- START STOP button and emergency disconnect switch (Benkpak International China);
- BUCK LM2596S voltage converter set to 5 V and BUCK XL4015 type voltage converter set to 12 V (Product origin: China);
- Housings with fuses and Relay (Product origin: China);
3. Model and Simulation
Device Operation Concept
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Meng, F.; Shi, Z.; Song, Y. The DMF: Fault Diagnosis of Diaphragm Pumps Based on Deep Learning and Multi-Source Information Fusion. Processes 2024, 12, 468. [Google Scholar] [CrossRef]
- Zamora, M.C.; Betanzo, C.R. Design and validation of a piezoelectric diaphragm micropump for drug delivery. Braz. J. Dev. 2024, 10, e69134. [Google Scholar] [CrossRef]
- Shankar, V.K.A.; Umashankar, S.; Paramasivam, S.; Hanigovszki, N. A comprehensive review on energy efficiency enhancement initiatives in centrifugal pumping system. Appl. Energy 2016, 181, 495–513. [Google Scholar] [CrossRef]
- Paajanen, M. Pumping of MFC Pulps with Different Pump Types and Its Economic Evaluation. Master’s Thesis, LUT University, Lappeenranta, Finland, 2024. [Google Scholar]
- Liao, Y.; Wang, H.; Chen, B.; Liu, Y. Deformation investigation of electromagnetic diaphragm pump rubber diaphragm. PLoS ONE 2024, 19, e0304052. [Google Scholar] [CrossRef] [PubMed]
- Sideris, E.A.; de Lange, H.C.; Johanson, U.; Tamm, T. Solid-State Electromechanical Smart Material Actuators for Pumps—A Review. Actuators 2024, 13, 232. [Google Scholar] [CrossRef]
- Liao, Y.; Liu, Y.; Xing, J.; Chen, B.; Gao, L. Electromagnetic force investigation of electromagnets with variable pole area in an electromagnetic diaphragm pump. PLoS ONE 2023, 18, e0292685. [Google Scholar] [CrossRef] [PubMed]
- Zakri, W.; Nadeem, S.; Rashid, M.; Alzabut, J.; Ghazwani, H.A. Mathematical modeling and analysis for electromagnetohydrodynamic viscous fluid flow with corrugated walls inside a curved channel. ZAMM-J. Appl. Math. Mech./Z. FÜR Angew. Math. Und Mech. 2024, 104, e202300172. [Google Scholar] [CrossRef]
- Xu, F.; Cao, Y.; Gong, H.; Li, J.; Xu, Y.; Shi, L. Mass Transport and Energy Conversion of Magnetic Nanofluids from Nanoparticles’ Movement and Liquid Manipulation. Processes 2024, 12, 955. [Google Scholar] [CrossRef]
- Zhao, K.; Lou, Y.; Peng, G.; Liu, C.; Chang, H. A Review of the Development and Research Status of Symmetrical Diaphragm Pumps. Symmetry 2023, 15, 2091. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Z.; Yang, Z. Analysis and reduction of electromagnetic vibration in integral-slot PM machine by functional magnet structure. Int. J. Appl. Electromagn. Mech. 2024, 74, 251–268. [Google Scholar] [CrossRef]
- Chettiar, K.S.; Lad, A.A.; Miller, H.; Libbos, E.; Banerjee, A.; Miljkovic, N. Electro-thermal co-design of a variable pole toroidal induction motor. Appl. Therm. Eng. 2024, 254, 123829. [Google Scholar] [CrossRef]
- Yamamoto, I.; Hirata, K.; Niguchi, N.; Kaneshige, H. Study of Axial Electromagnetic Force of Variable Flux Motor with Draw-Out Mechanism. J. Jpn. Soc. Appl. Electromagn. Mech. 2024, 32, 9–16. [Google Scholar] [CrossRef]
- Xiang, L.; Yang, S.; Wang, Q.; Wu, J. Design and testing of a direct current electromagnetic pump for liquid metal. Therm. Sci. Eng. Prog. 2024, 50, 102560. [Google Scholar] [CrossRef]
- Pan, S.; Zhou, M.; Liu, L.; Shen, H. Electromagnetic based flexible bioelectronics and its applications. Front. Electron. 2024, 5, 1240603. [Google Scholar] [CrossRef]
- Sun, E.; Zhu, Q.; Rehman, H.U.; Wu, T.; Cao, X.; Wang, N. Magnetic Material in Triboelectric Nanogenerators: A Review. Nanomaterials 2024, 14, 826. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.Y.; Chou, P.C.; Fu, L.M.; Zhong, J.H. Design and fabrication of an electromagnetic pump for microfluidic applications. In Proceedings of the 2012 IEEE Symposium on Industrial Electronics and Applications, Bandung, Indonesia, 23–26 September 2012; pp. 199–203. [Google Scholar] [CrossRef]
- Cai, J.; Wu, Y.; Wang, Y.; Chen, B.; Qu, X.; Wen, H. Design Passive Magnetic Mechanisms with Modular Magnet Configuration for Axial Gas Force Balance in Miniature Scroll Compressors. Int. J. Refrig. 2024, 166, 42–52. [Google Scholar] [CrossRef]
- Mamala, J.; Graba, M.; Prażnowski, K.; Tomczuk, B.; Waindok, A. Structural and Material Analysis of an Electromagnetic Actuator for Pressure Control in an Internal Combustion Engine. Pomiary Autom. Robot. 2024, 28, 5–13. [Google Scholar] [CrossRef]
- Wang, Y.H.; Tsai, Y.W.; Tsai, C.H.; Lee, C.Y.; Fu, L.M. Design and analysis of impedance pumps utilizing electromagnetic actuation. Sensors 2010, 10, 4040–4052. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.; Miao, X.; Lu, H.; Liu, S.; Yang, Z. High-Efficiency 3D-Printed Three-Chamber Electromagnetic Peristaltic Micropump. Micromachines 2023, 14, 257. [Google Scholar] [CrossRef] [PubMed]
- Moise, V.; Marii, L.; Svasta, P. Pump control system in microfluidic systems. In Proceedings of the 2021 44th International Spring Seminar on Electronics Technology (ISSE), Bautzen, Germany, 5–9 May 2021; pp. 1–5. [Google Scholar]
- Qi, C.; Sugita, N.; Shinshi, T. A disposable electromagnetic bi-directional micropump utilizing a rotating multi-pole ring magnetic coupling. Micromachines 2022, 13, 1565. [Google Scholar] [CrossRef] [PubMed]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Skupień, S.; Kowol, P.; Capizzi, G.; Sciuto, G.L. Control System Hardware Design, Analysis and Characterization of Electromagnetic Diaphragm Pump. Appl. Sci. 2024, 14, 8043. https://doi.org/10.3390/app14178043
Skupień S, Kowol P, Capizzi G, Sciuto GL. Control System Hardware Design, Analysis and Characterization of Electromagnetic Diaphragm Pump. Applied Sciences. 2024; 14(17):8043. https://doi.org/10.3390/app14178043
Chicago/Turabian StyleSkupień, Szymon, Paweł Kowol, Giacomo Capizzi, and Grazia Lo Sciuto. 2024. "Control System Hardware Design, Analysis and Characterization of Electromagnetic Diaphragm Pump" Applied Sciences 14, no. 17: 8043. https://doi.org/10.3390/app14178043