
Factors Affecting Rear-End Collisions in Underground Road Junctions Using VISSIM



Abstract
1. Introduction
2. Literature Review
2.1. Evaluating the Effectiveness of Underground Roads
2.2. Safety Evaluation Studies with SSMs
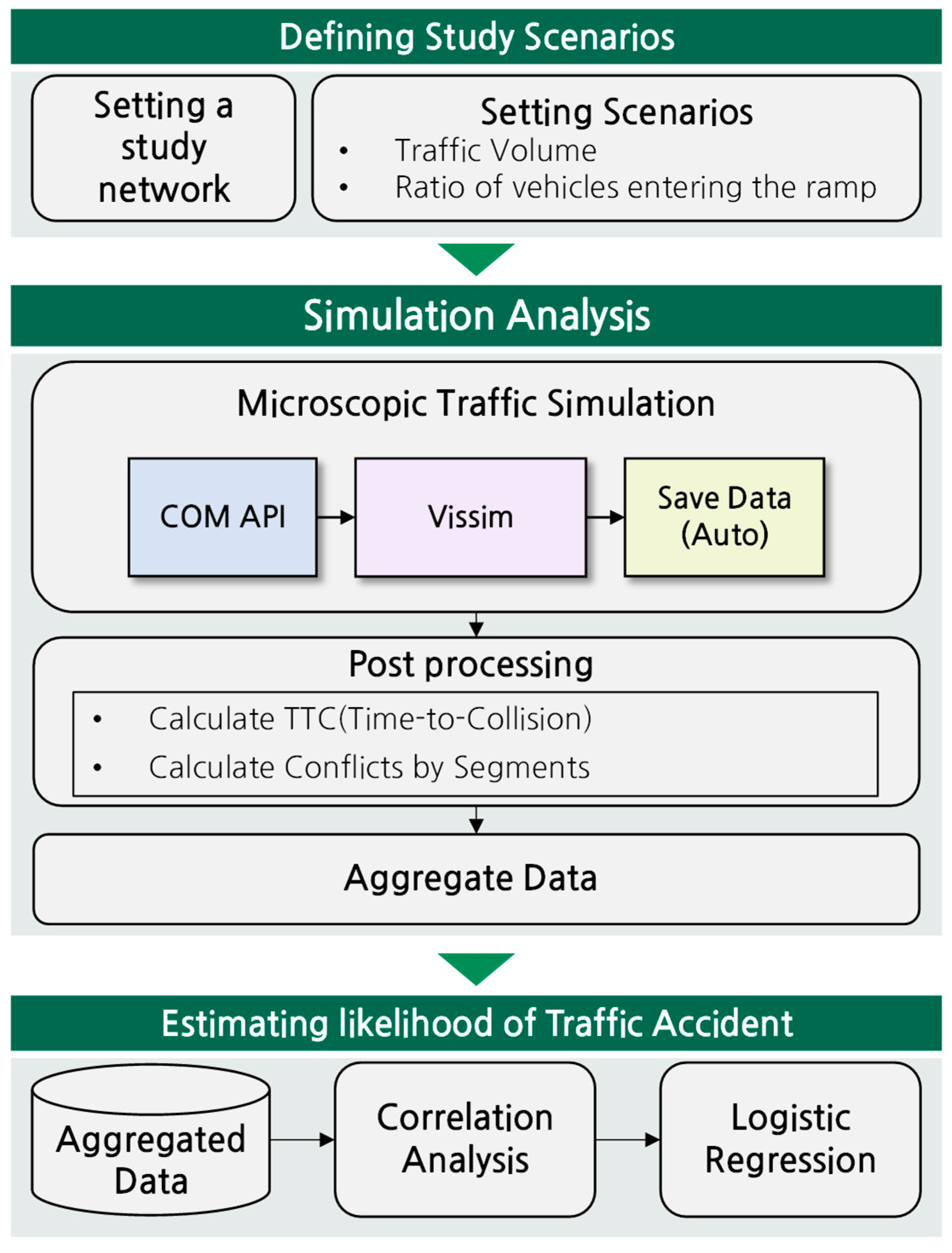
3. Methodology
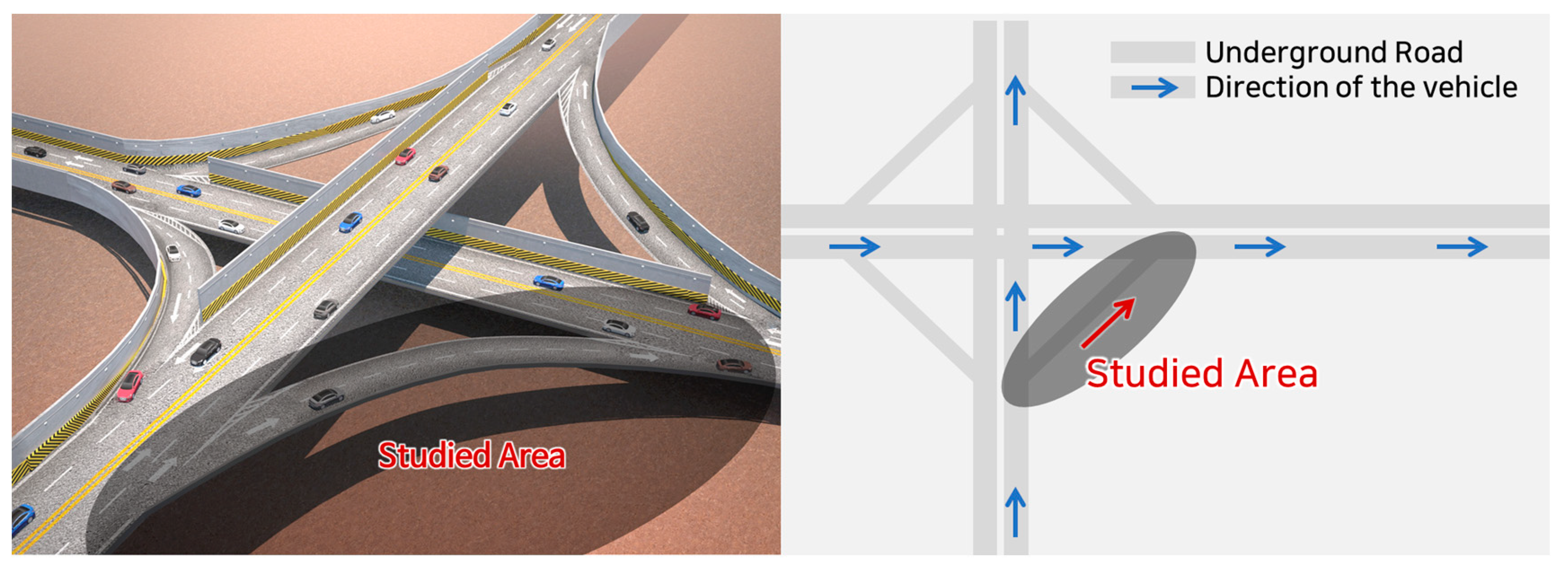
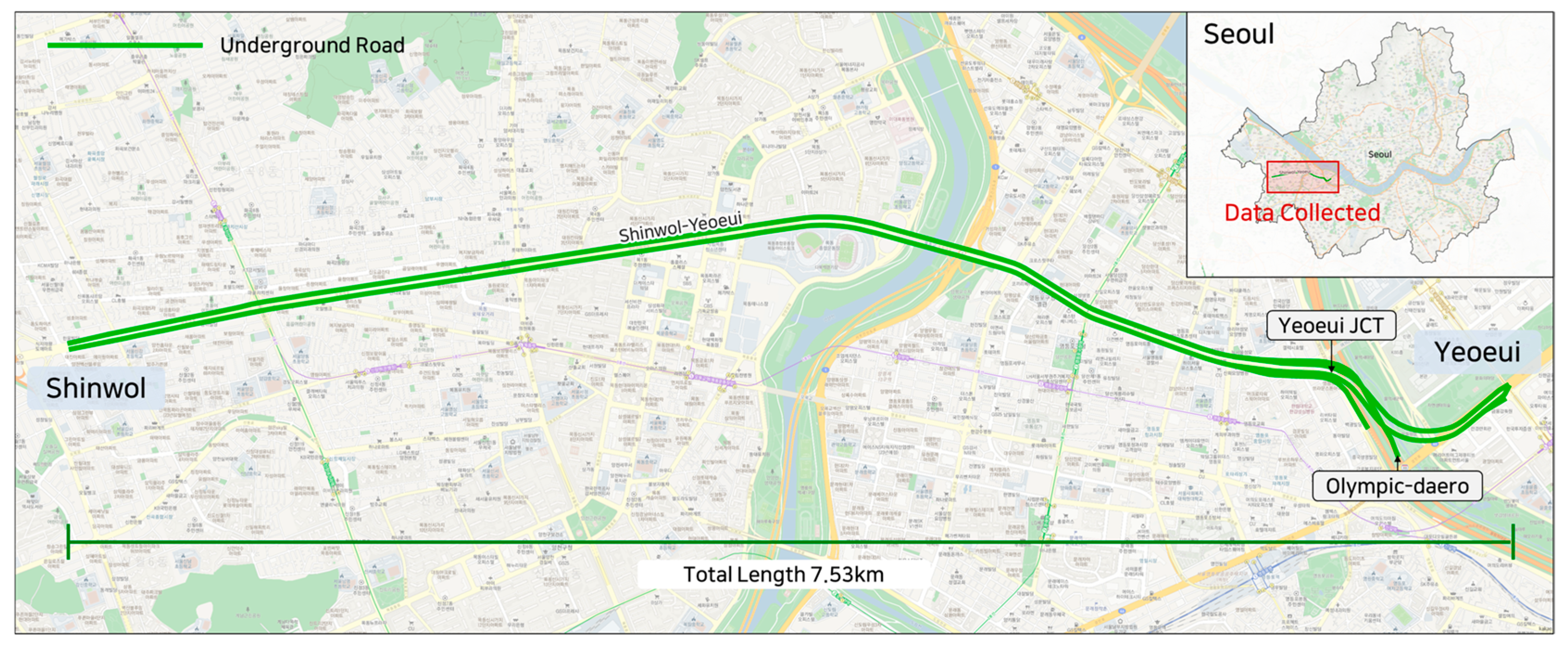
3.1. Simulation Network and Scenario
3.2. Data Processing
3.3. Logistic Regression
4. Results
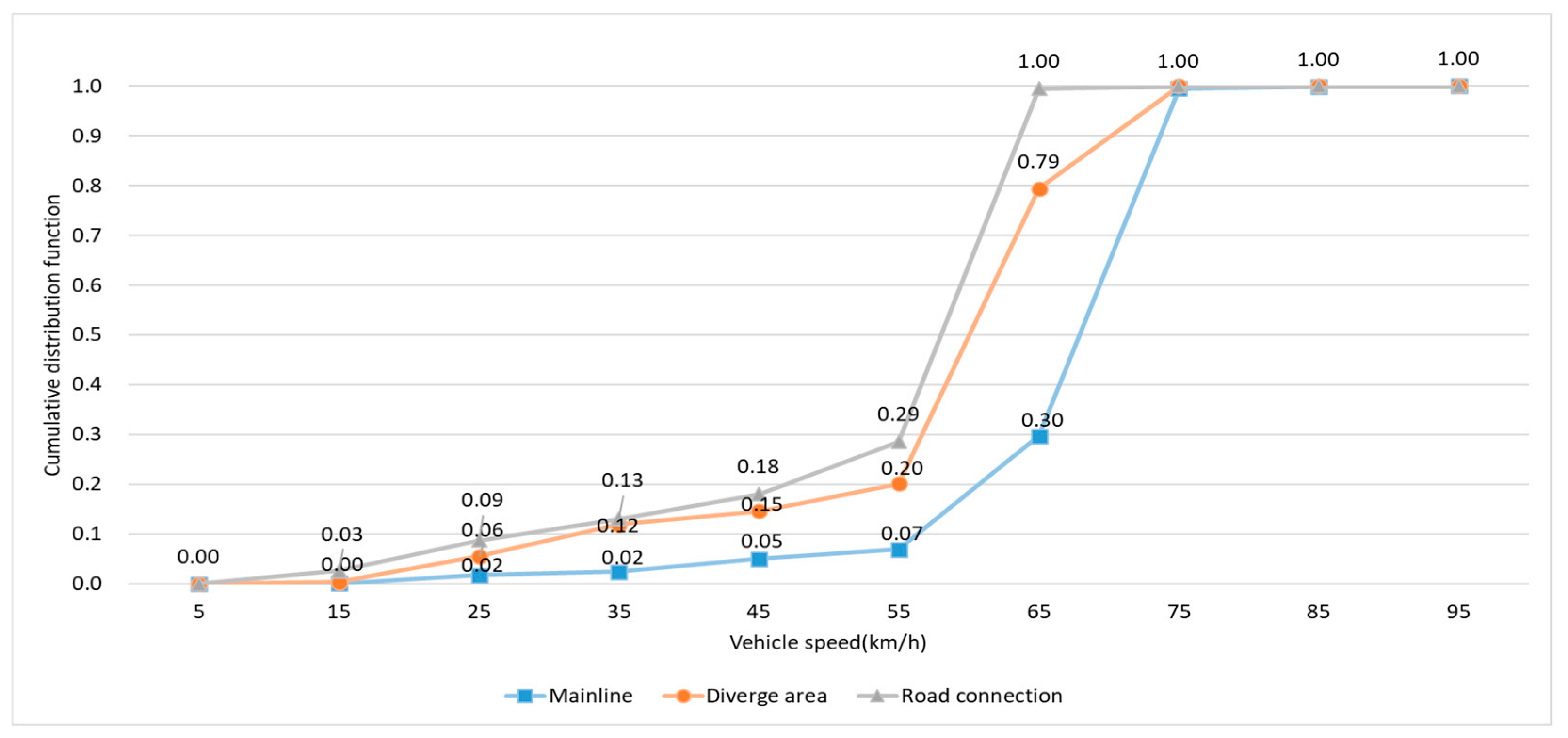
4.1. Simulation Result
4.2. Logisitic Regression Result
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Durmisevic, S. The future of the underground space. Cities 1999, 16, 233–245. [Google Scholar] [CrossRef]
- Tsagkis, P.; Bakogiannis, E.; Nikitas, A. Analysing urban growth using machine learning and open data: An artificial neural network modelled case study of five Greek cities. Sustain. Cities Soc. 2023, 89, 104337. [Google Scholar] [CrossRef]
- Barter, P. Urban Transport in Asia: Problems and prospects for high-density cities1. Asia-Pac. Dev. Monit. 2000, 2, 33–66. [Google Scholar]
- Eom, H.-J.; Cho, G.-H. Exploring thresholds of built environment characteristics for walkable communities: Empirical evidence from the Seoul Metropolitan area. Transp. Res. Part D Transp. Environ. 2015, 40, 76–86. [Google Scholar] [CrossRef]
- Bobylev, N. Mainstreaming sustainable development into a city’s Master plan: A case of Urban Underground Space use. Land Use Policy 2009, 26, 1128–1137. [Google Scholar] [CrossRef]
- Wang, W.; Hu, Y.; Liu, Q. A New Set of Social Benefit Evaluation Parameters for Underground Road Project. In Proceedings of the 2010 International Conference on Management and Service Science, Wuhan, China, 24–26 August 2010; pp. 1–4. [Google Scholar]
- Benardos, A.; Kazos, X.; Sotiropoulos, N. Design Analysis for the Underground Relocation of a Central Road Artery in Athens; The Society for Rock Mechanics & Engineering Geology: Singapore, 2013; pp. 557–566. [Google Scholar]
- Feng, Z.; Yang, M.; Zhang, W.; Du, Y.; Bai, H. Effect of longitudinal slope of urban underpass tunnels on drivers’ heart rate and speed: A study based on a real vehicle experiment. Tunn. Undergr. Space Technol. 2018, 81, 525–533. [Google Scholar] [CrossRef]
- Yeung, J.S.; Wong, Y.D. Road traffic accidents in Singapore expressway tunnels. Tunn. Undergr. Space Technol. 2013, 38, 534–541. [Google Scholar] [CrossRef]
- Liu, S.; Wang, J.; Fu, T. Effects of Lane Width, Lane Position and Edge Shoulder Width on Driving Behavior in Underground Urban Expressways: A Driving Simulator Study. Int. J. Environ. Res. Public Health 2016, 13, 1010. [Google Scholar] [CrossRef]
- Qin, X.; Zhang, N.; Zhang, W.; Meitner, M. How does tunnel interior color environment influence driving behavior? Quantitative analysis and assessment experiment. Tunn. Undergr. Space Technol. 2020, 98, 103320. [Google Scholar] [CrossRef]
- Zhang, Y. Analysis of the Relation between Highway Horizontal Curve and Traffic Safety. In Proceedings of the 2009 International Conference on Measuring Technology and Mechatronics Automation-Volume 03, Zhangjiajie, China, 11–12 April 2009; IEEE Computer Society: Los Alamitos, CA, USA, 2009; pp. 479–481. [Google Scholar]
- Sun, J.; Ma, Z.; Li, T.; Niu, D. Development and application of an integrated traffic simulation and multi-driving simulators. Simul. Model. Pract. Theory 2015, 59, 1–17. [Google Scholar] [CrossRef]
- Calvi, A.; D’Amico, F. A study of the effects of road tunnel on driver behavior and road safety using driving simulator. Adv. Transp. Stud. 2013, 30, 59–76. [Google Scholar]
- Huang, Y.; Chen, F.; Song, M.; Pan, X.; You, K. Effect evaluation of traffic guidance in urban underground road diverging and merging areas: A simulator study. Accid. Anal. Prev. 2023, 186, 107036. [Google Scholar] [CrossRef] [PubMed]
- Xia, Z.; Lv, Y.; Pan, X.; Chen, F.; Xu, M.; Wu, G.; Feng, D. Research on Design Pattern of City Tunnel Side Wall Based on the Driver Visual Effect. In Proceedings of the Advances in Human Aspects of Transportation, Los Angeles, CA, USA, 17−21 July 2017; Stanton, N.A., Landry, S., Di Bucchianico, G., Vallicelli, A., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 689–701. [Google Scholar]
- Domenichini, L.; La Torre, F.; Vangi, D.; Virga, A.; Branzi, V. Influence of the lighting system on the driver’s behavior in road tunnels: A driving simulator study. J. Transp. Saf. Secur. 2017, 9, 216–238. [Google Scholar] [CrossRef]
- Zhao, L.; Jiang, H.; Hu, J. Driver’s Physiological and Mental Reaction in Tunnel. In ICCTP 2011: Towards Sustainable Transportation Systems, Proceedings of the 11th International Conference of Chinese Transportation Professionals (ICCTP), Nanjing, China, 14–17 August 2011; American Society of Civil Engineers: Reston, VA, USA, 2012; pp. 1760–1766. [Google Scholar] [CrossRef]
- Chen, F.; Peng, H.; Ma, X.; Liang, J.; Hao, W.; Pan, X. Examining the safety of trucks under crosswind at bridge-tunnel section: A driving simulator study. Tunn. Undergr. Space Technol. 2019, 92, 103034. [Google Scholar] [CrossRef]
- Yang, C.H.; Park, S.B.; Kim, J.G.; Moon, J.P. Development and Application of Traffic Control Framework for Underground Roads. 2022. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=4291161 (accessed on 20 August 2024).
- Xing, Y.; Lu, J.; Lu, L.; Jiang, C.; Cai, X. Traffic Safety Evaluation Model of Road Tunnels Based on VISSIM. In Proceedings of the Fourth International Conference on Transportation Engineering, Chengdu, China, 19–20 October 2013; pp. 1075–1085. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, L.; Zhou, X.; Yu, J.; Liu, G. Traffic Accident Influence in Freeway Tunnel Simulation Analysis Based on the VISSIM; Atlantis Press: Dordrecht, The Netherlands, 2016; pp. 223–227. [Google Scholar]
- Yi, L.; Xiang, Q.; Len, H. Impact of Lighting on Traffic Safety in Freeway Tunnel. In ICCTP 2011: Towards Sustainable Transportation Systems, Proceedings of the 11th International Conference of Chinese Transportation Professionals (ICCTP), Nanjing, China, 14–17 August 2011; American Society of Civil Engineers: Reston, VA, USA, 2012; pp. 2358–2366. [Google Scholar] [CrossRef]
- Yu, S.; Chen, Y.; Song, L.; Xuan, Z.; Li, Y. Modelling and Mitigating Secondary Crash Risk for Serial Tunnels on Freeway via Lighting-Related Microscopic Traffic Model with Inter-Lane Dependency. Int. J. Environ. Res. Public Health 2023, 20, 3066. [Google Scholar] [CrossRef]
- Wang, Q.; Jiang, X.; Park, H.; Wang, M. HGV fire risk assessment method in highway tunnel based on a Bayesian network. Tunn. Undergr. Space Technol. 2023, 140, 105247. [Google Scholar] [CrossRef]
- Weng, J.; Meng, Q. Rear-end crash potential estimation in the work zone merging areas. J. Adv. Transp. 2014, 48, 238–249. [Google Scholar] [CrossRef]
- Zhao, P.; Lee, C. Assessing rear-end collision risk of cars and heavy vehicles on freeways using a surrogate safety measure. Accid. Anal. Prev. 2018, 113, 149–158. [Google Scholar] [CrossRef]
- Wu, Y.; Abdel-Aty, M.; Wang, L.; Rahman, M.S. Combined connected vehicles and variable speed limit strategies to reduce rear-end crash risk under fog conditions. J. Intell. Transp. Syst. 2020, 24, 494–513. [Google Scholar] [CrossRef]
- Xing, L.; He, J.; Abdel-Aty, M.; Wu, Y.; Yuan, J. Time-varying Analysis of Traffic Conflicts at the Upstream Approach of Toll Plaza. Accid. Anal. Prev. 2020, 141, 105539. [Google Scholar] [CrossRef]
- Hayward, J. Near Misses as a Measure of Safety at Urban Intersections; Pennsylvania State University, Department of Civil Engineering: University Park, PA, USA, 1971. [Google Scholar]
- PTV. Vissim 2020 User Manual; PTV AG: Karlsruhe, Germany, 2020. [Google Scholar]
- Ministry of Land, Transport and Martime Affairs. Korean Highway Capacity Manual; Ministry of Land, Transport and Maritime Affairs: Sejong, Republic of Korea, 2013. [Google Scholar]
- Ministry of Land, Infrastructure and Transport. Explanation of the Rules for Structural and Facility Standards for Roads; Ministry of Land, Infrastructure and Transport: Sejong, Republic of Korea, 2020. [Google Scholar]
- Ministry of Land, Infrastructure and Transport. Design Guidelines for Underground Roads in Urban Areas; Ministry of Land, Infrastructure and Transport: Sejong, Republic of Korea, 2016. [Google Scholar]
- Pu, L.; Joshi, R.; Siemens Energy and Automation. Business Unit Intelligent Transportation Systems. In Surrogate Safety Assessment Model (SSAM)—Software User Manual; Federal Highway Administration: McLean, VA, USA, 2008. [Google Scholar]
- Kuhnert, P.M.; Do, K.-A.; McClure, R. Combining non-parametric models with logistic regression: An application to motor vehicle injury data. Comput. Stat. Data Anal. 2000, 34, 371–386. [Google Scholar] [CrossRef]
- Ma, L.; Yan, X. Examining the nonparametric effect of drivers’ age in rear-end accidents through an additive logistic regression model. Accid. Anal. Prev. 2014, 67, 129–136. [Google Scholar] [CrossRef] [PubMed]
- Greene, W.H. LIMDEP Econometric Modeling Guide, Version 8.0; Econometric Software: Plainview, NY, USA, 2002. [Google Scholar]
- Uddin, M.A.; Debnath, M.; Roy, S.; Adiba, S.; Talukder, M.M.A. Identifying the Smoking and Smokeless Tobacco-Related Predictors on Frequencies of Heavy Vehicle Traffic Accidents in Bangladesh: Linear and Binary Logistic Regression-Based Approach. Adv. Civ. Eng. 2023, 2023, e7116057. [Google Scholar] [CrossRef]
- van Driel, C.J.G.; Davidse, R.J.; van Maarseveen, M.F.A.M. The effects of an edgeline on speed and lateral position: A meta-analysis. Accid. Anal. Prev. 2004, 36, 671–682. [Google Scholar] [CrossRef] [PubMed]
- Bella, F. Driver perception of roadside configurations on two-lane rural roads: Effects on speed and lateral placement. Accid. Anal. Prev. 2013, 50, 251–262. [Google Scholar] [CrossRef]
- Charly, A.; Mathew, T.V. Estimation of traffic conflicts using precise lateral position and width of vehicles for safety assessment. Accid. Anal. Prev. 2019, 132, 105264. [Google Scholar] [CrossRef]
- Guo, M.; Zhao, X.; Yao, Y.; Yan, P.; Su, Y.; Bi, C.; Wu, D. A study of freeway crash risk prediction and interpretation based on risky driving behavior and traffic flow data. Accid. Anal. Prev. 2021, 160, 106328. [Google Scholar] [CrossRef]
- Hamzeie, R.; Savolainen, P.T.; Gates, T.J. Driver speed selection and crash risk: Insights from the naturalistic driving study. J. Saf. Res. 2017, 63, 187–194. [Google Scholar] [CrossRef]
- Chen, Q.; Huang, H.; Li, Y.; Lee, J.; Long, K.; Gu, R.; Zhai, X. Modeling accident risks in different lane-changing behavioral patterns. Anal. Methods Accid. Res. 2021, 30, 100159. [Google Scholar] [CrossRef]
- Waizman, G.; Shoval, S.; Benenson, I. Traffic accident risk assessment with dynamic microsimulation model using range-range rate graphs. Accid. Anal. Prev. 2018, 119, 248–262. [Google Scholar] [CrossRef]
- Liu, P.; Zhang, X.; Wang, W.; Xu, C. Driver Response to Automated Speed Enforcement on Rural Highways in China. Transp. Res. Rec. 2011, 2265, 109–117. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Content |
|---|---|
| Lane | Main road: 2 lanes one way |
| Connection road: 1 lane | |
| Vehicle composition | Underground road: Car only |
| Ground road: All vehicle | |
| Link Length | Main road: 10 km |
| Connection road: 1 km | |
| Designed speed | Main road: 80 km/h |
| Connection road: 60 km/h | |
| Gradient of link | Main road: 8% |
| Connection road: 10% | |
| Lane width | Main road: 3.5 m |
| Connection road: 3.5 m | |
| Capacity | Main road: 4000 pcph (veh/hour) 1 |
| Connection road: 1800 pcph (veh/hour) 1 | |
| Acceleration and deceleration lane | Acceleration: 205 m |
| Deceleration: 180 m | |
| Separation distance between JC | Main road: 2 km |
| Curve radius | Main road: 450 m |
| Connection road: 250 m |
| Speed Distribution | Volume of R1 | Volume of R2 | Access Rate to Ramp | |
|---|---|---|---|---|
| Speed on surface roads (Without) | LOS B | LOS B | 15% of R1 traffic | 30% of R1 traffic |
| LOS C | LOS C | 20% of R1 traffic | 35% of R1 traffic | |
| Speed on underground (With) | LOS D | LOS D | 25% of R1 traffic | 40% of R1 traffic |
| LOS E | LOS E | |||
| Variable | Description | Variable | Description |
|---|---|---|---|
| Time frame | Simulation seconds | DensityMean | Acceleration average |
| Segment | Analysis points (No.) | AccelerationStd | Standard deviation of acceleration |
| Conflict | Conflict or not at segment m (conflict: 1, non-conflict: 0) | SpeedStd | Standard deviation of speed |
| AccelerationMean | Average of acceleration | PosLatStd | Standard deviation of lateral position |
| SpeedMean | Average speed | SpacingStd | Standard deviation of distance between vehicles |
| PosLatMean | Average of lateral position | DensityStd | Standard deviation of density |
| SpacingMean | Average of distance between vehicles |
| Time Frame | Segment | Conflict | Acceleration Mean | Speed Mean | PosLat Mean | Spacing Mean | Density Mean | Acceleration Std | Speed Std | PosLat Std | Spacing Std | Density Std |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 601 | 83 | 0 | −0.1 | 78.3 | 0.5 | 30.9 | 48.6 | 0.2 | 1.0 | 7.8 | 0.1 | 12.8 |
| 601 | 84 | 0 | −0.1 | 77.9 | 0.5 | 28.4 | 47.6 | 0.2 | 1.1 | 7.7 | 0.1 | 10.1 |
| 601 | 85 | 0 | −0.1 | 77.0 | 0.5 | 33.0 | 46.4 | 0.1 | 1.0 | 7.5 | 0.1 | 22.5 |
| 601 | 86 | 0 | 0.3 | 79.8 | 0.5 | 35.9 | 46.6 | 0.1 | 0.6 | 4.7 | 0.2 | 26.9 |
| 601 | 87 | 0 | 0.1 | 74.1 | 0.5 | 33.6 | 30.5 | 0.0 | 0.7 | 13.4 | 0.2 | 31.0 |
| ⋮ | … | |||||||||||
| 4200 | 112 | 1 | −1.4 | 57.0 | 0.5 | 61.8 | 34.4 | 0.0 | 3.2 | 21.7 | 0.1 | 40.9 |
| 4200 | 113 | 0 | −1.4 | 57.0 | 0.5 | 61.8 | 34.4 | 0.1 | 3.2 | 21.7 | 0.1 | 40.9 |
| 4200 | 114 | 0 | −1.2 | 58.8 | 0.5 | 64.9 | 35.7 | 0.1 | 3.4 | 22.7 | 0.1 | 43.1 |
| 4200 | 115 | 0 | 0.1 | 80.7 | 0.5 | 90.3 | 29.5 | 0.1 | 0.5 | 9.1 | 0.0 | 31.7 |
| 4200 | 116 | 0 | −0.1 | 77.0 | 0.5 | 65.5 | 24.3 | 0.0 | 0.3 | 11.7 | 0.0 | 55.9 |
| Without | With | |||
|---|---|---|---|---|
| Non-conflict | 68,217 | 63.2% | 51,298 | 47.5% |
| Conflict | 39,783 | 36.8% | 56,702 | 52.5% |
| Total | 108,000 | 100% | 108,000 | 100% |
| Mean | LOS B | LOS C | LOS D | LOS E | ||
|---|---|---|---|---|---|---|
| Without | AccelerationMean [m/s2] | −0.1 | −0.1 | −0.1 | −0.1 | −0.1 |
| SpeedMean [km/h] | 61.6 | 70.0 | 68.9 | 63.0 | 47.8 | |
| PosLatMean [m] | 314.9 | 332.6 | 339.5 | 332.7 | 266.8 | |
| SpacingMean [m] | 55.9 | 66.2 | 64.2 | 55.6 | 41.4 | |
| DensityMean [veh/km] | 40.3 | 18.4 | 21.3 | 36.6 | 76.0 | |
| AccelerationStd [m/s2] | 1.1 | 0.7 | 0.8 | 1.0 | 1.6 | |
| SpeedStd [km/h] | 16.6 | 12.6 | 12.8 | 15.9 | 23.2 | |
| PosLatStd [m] | 316.5 | 329.7 | 331.1 | 324.2 | 288.1 | |
| SpacingStd [m] | 54.6 | 65.2 | 60.8 | 51.6 | 43.5 | |
| DensityStd [veh/km] | 30.3 | 15.6 | 17.0 | 27.4 | 55.0 | |
| With | AccelerationMean [m/s2] | −0.1 | 0.0 | −0.1 | −0.1 | −0.1 |
| SpeedMean [km/h] | 32.2 | 40.7 | 34.0 | 27.1 | 27.0 | |
| PosLatMean [m] | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | |
| SpacingMean [m] | 29.6 | 40.3 | 31.1 | 23.5 | 23.4 | |
| DensityMean [veh/km] | 75.6 | 48.9 | 65.0 | 93.9 | 94.7 | |
| AccelerationStd [m/s2] | 1.8 | 1.4 | 1.7 | 2.0 | 2.0 | |
| SpeedStd [km/h] | 21.7 | 22.6 | 22.4 | 21.0 | 20.9 | |
| PosLatStd [m] | 0.0 | 0.1 | 0.1 | 0.0 | 0.0 | |
| SpacingStd [m] | 35.5 | 45.7 | 37.9 | 29.4 | 29.1 | |
| DensityStd [veh/km] | 35.8 | 26.4 | 32.0 | 42.5 | 42.5 |
| Variable | Coefficient | Odds Ratio | p-Value |
|---|---|---|---|
| Intercept | 0.0213 | 1.022 | <0.01 |
| AccelerationMean | 0.0742 | 1.077 | <0.01 |
| SpeedMean | −0.0106 | 0.989 | <0.01 |
| PosLatMean | −0.469 | 0.626 | <0.01 |
| SpacingMean | −0.0134 | 0.987 | <0.01 |
| DensityMean | 0.0114 | 1.011 | <0.01 |
| AccelerationStd | 0.6599 | 1.935 | <0.01 |
| SpeedStd | −0.0032 | 0.997 | <0.01 |
| PosLatStd | 2.2134 | 9.147 | <0.01 |
| SpacingStd | −0.0075 | 0.993 | <0.01 |
| DensityStd | −0.0034 | 0.997 | <0.01 |
| R1_C | 0.0321 | 1.033 | <0.01 |
| R1_D | 0.0595 | 1.061 | <0.01 |
| R1_E | 0.0638 | 1.066 | <0.01 |
| R2_C | −0.0028 | 0.997 | <0.01 |
| R2_D | −0.0362 | 0.964 | <0.01 |
| R2_E | −0.0474 | 0.954 | <0.01 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, Z.; Lee, G.; Yang, C.; Lee, J.-K. Factors Affecting Rear-End Collisions in Underground Road Junctions Using VISSIM. Appl. Sci. 2024, 14, 8509. https://doi.org/10.3390/app14188509
Park Z, Lee G, Yang C, Lee J-K. Factors Affecting Rear-End Collisions in Underground Road Junctions Using VISSIM. Applied Sciences. 2024; 14(18):8509. https://doi.org/10.3390/app14188509
Chicago/Turabian StylePark, Zion, Gunwoo Lee, Choongheon Yang, and Jin-Kak Lee. 2024. "Factors Affecting Rear-End Collisions in Underground Road Junctions Using VISSIM" Applied Sciences 14, no. 18: 8509. https://doi.org/10.3390/app14188509
APA StylePark, Z., Lee, G., Yang, C., & Lee, J.-K. (2024). Factors Affecting Rear-End Collisions in Underground Road Junctions Using VISSIM. Applied Sciences, 14(18), 8509. https://doi.org/10.3390/app14188509