

Adaptive Control Parameter Optimization of Permanent Magnet Synchronous Motors Based on Super-Helical Sliding Mode Control

Abstract
:1. Introduction
1.1. Research Background
1.2. Literature Review
1.3. Contributions of the Work
- (a)
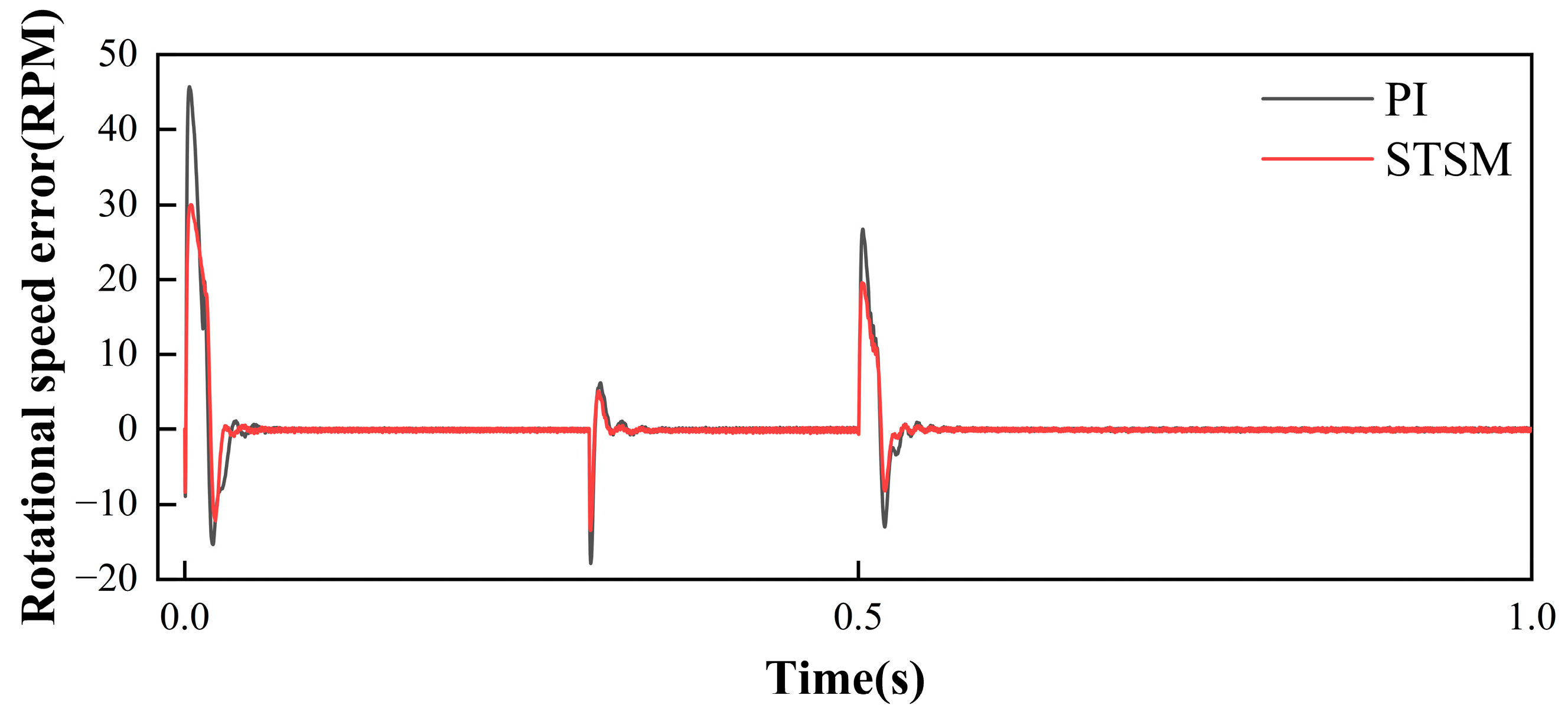
- Adaptive control method for permanent magnet synchronous motors based on super-helical sliding mode control: A novel adaptive control system for permanent magnet synchronous motors, employing super-helical sliding mode control, is proposed. This system exhibits superior performance in terms of response speed, robustness, and steady-state behavior when compared to conventional control systems.
- (b)
- Optimization of adaptive control parameters for permanent magnet synchronous motors: Two optimization algorithms, NSGA II and MOPSO, are utilized to optimize the parameters of the established system. Simulation results indicate a notable decrease in rotational speed and torque overshooting of permanent magnet synchronous motors under both optimization algorithms, highlighting significant optimization outcomes.
- (c)
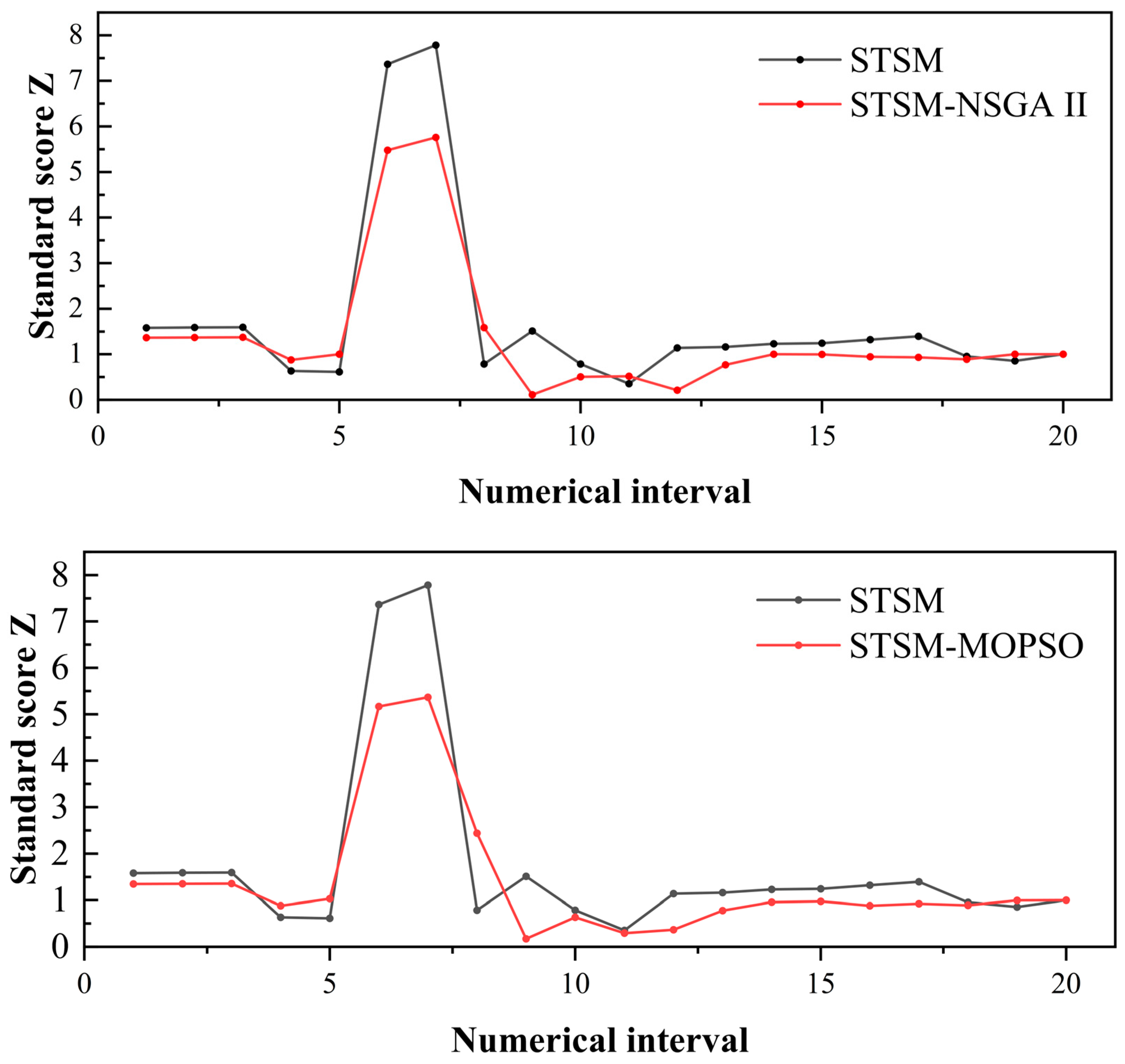
- Partial Sample Shannon Entropy Evaluation: To facilitate a comprehensive comparison of torque performance improvement under different optimization algorithms, this paper introduces the Shannon entropy-based torque evaluation strategy, PSSEE. This strategy effectively evaluates the motor’s output torque, revealing torque data accumulation through conversion into a standard fractional Z-curve. The optimization algorithm with the best performance is screened on the basis of torque analysis, which effectively improves the robustness of the motor.
1.4. Organization of the Paper
2. Mathematical Model of Permanent Magnet Synchronous Motor
3. Principles and Modeling of an Adaptive Control Method for PMSMs Based on Super-Helical SMC
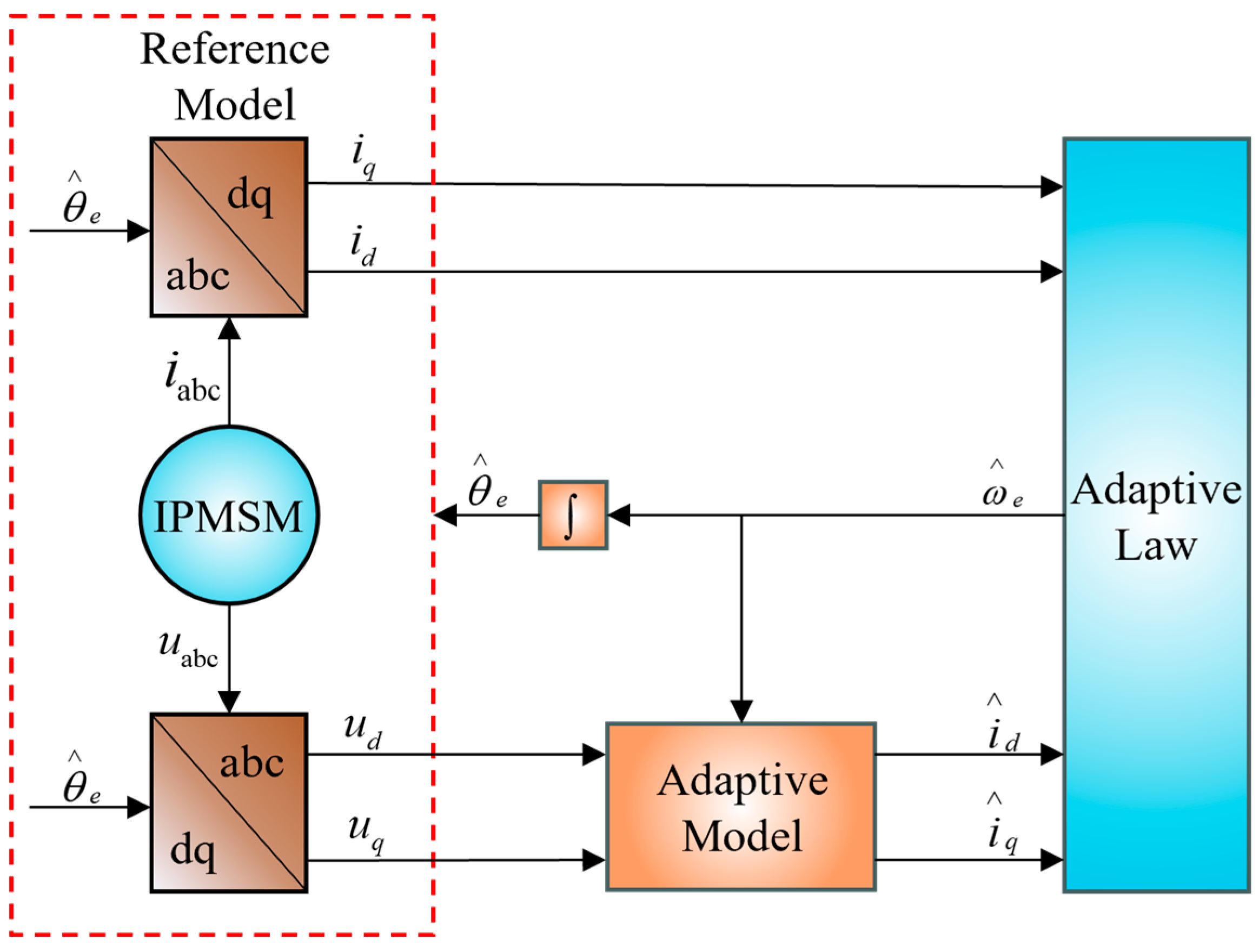
3.1. MRAS-Based PMSM Position Sensorless Control System
System Stability Proof
3.2. Model-Referenced Adaptive Control System Based on Super-Helical Sliding Mode Control
System Stability Proof
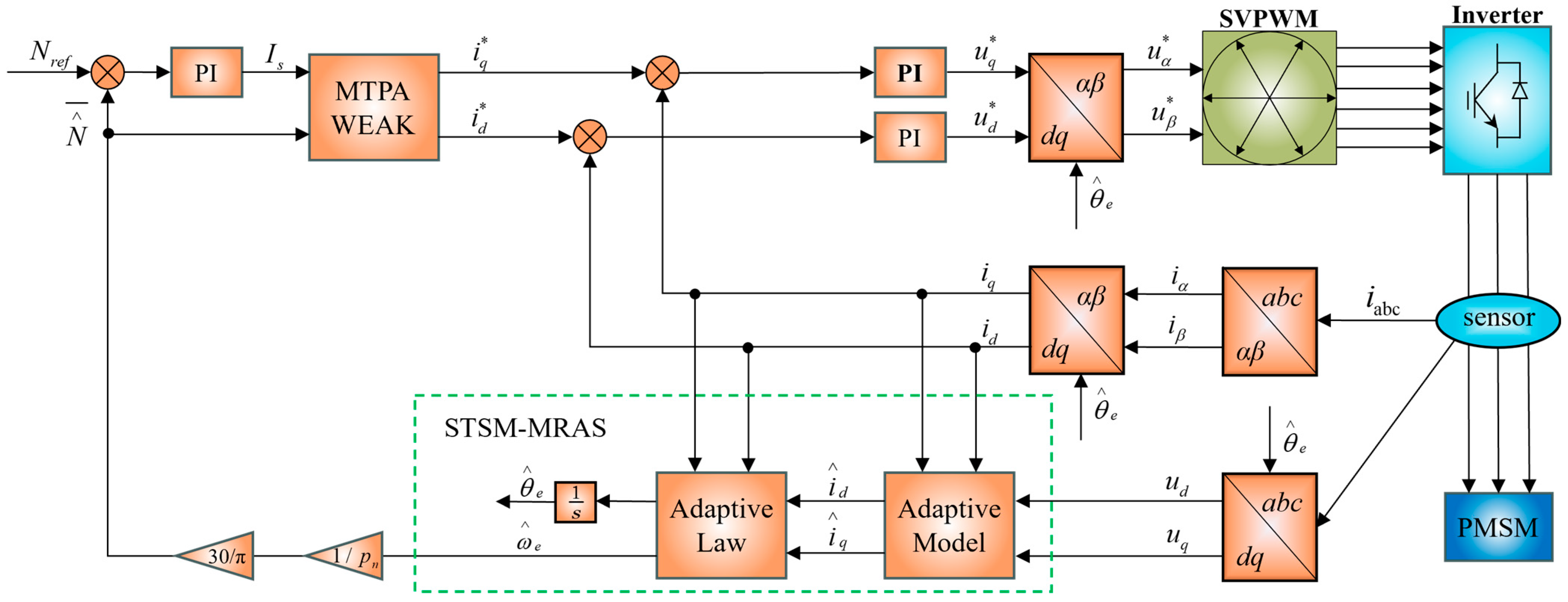
3.3. MRAS Control System Based on Super-Helical Sliding Mode
4. Optimization of Adaptive Control Parameters for Permanent Magnet Synchronous Motors
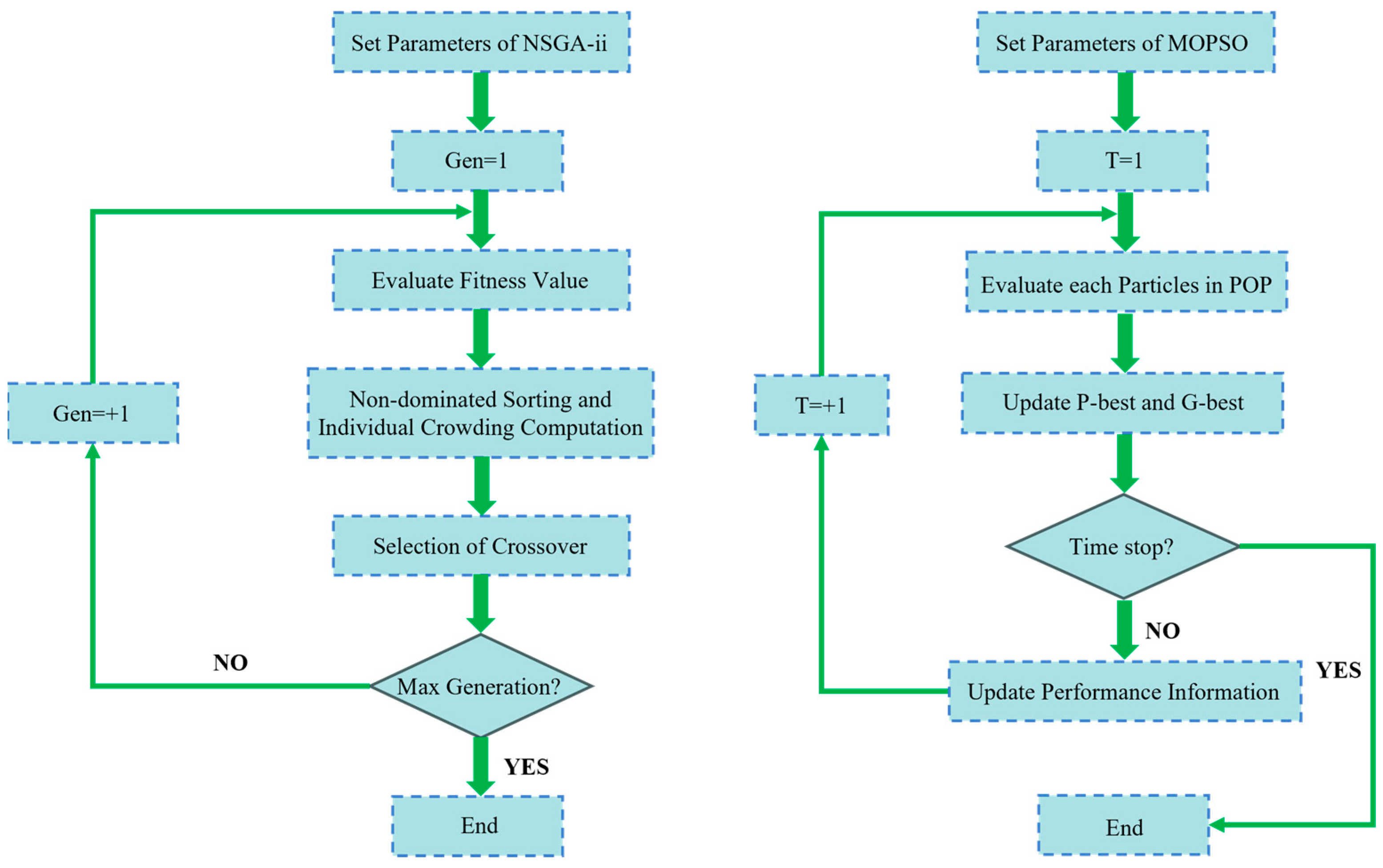
4.1. Parameter Optimization System
4.2. Partial Sample Shannon Entropy Evaluation
5. Results and Discussions
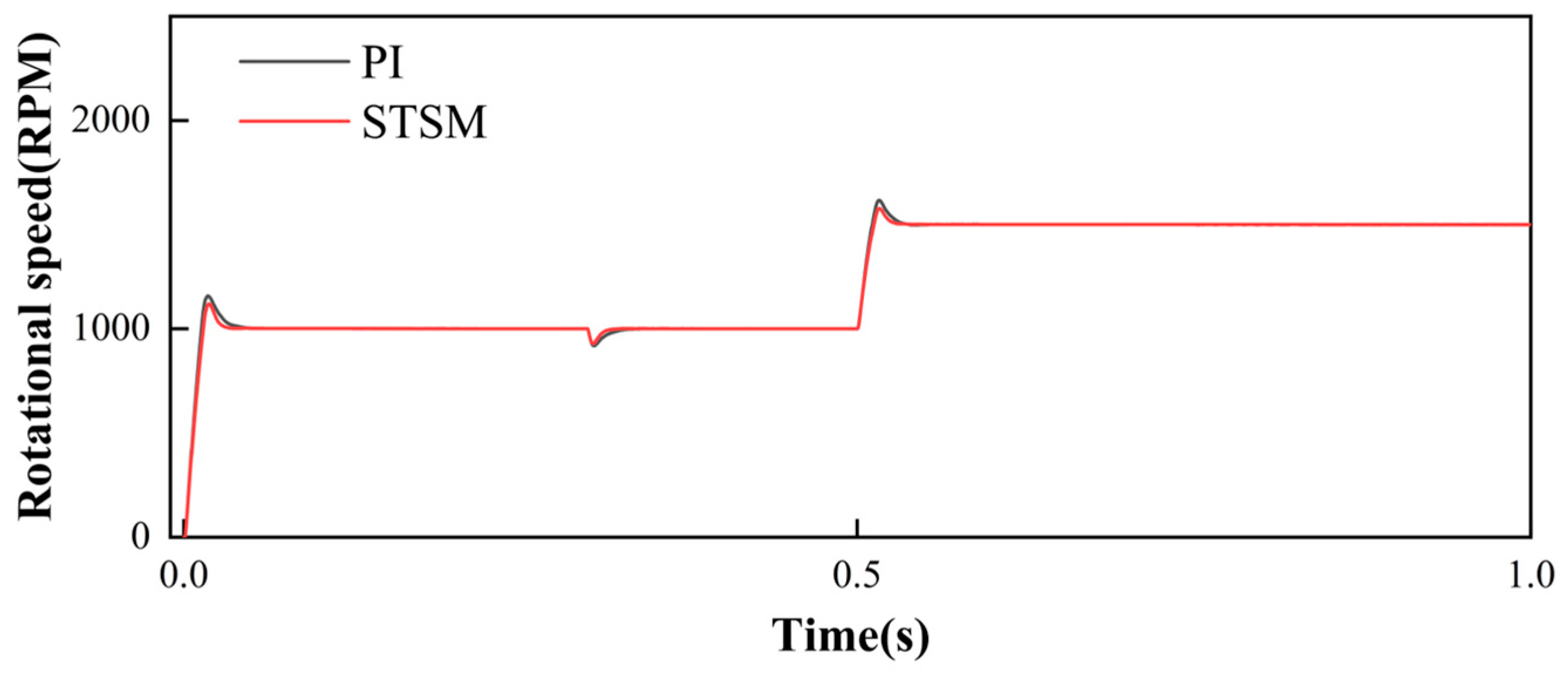
5.1. Feasibility Analysis
5.2. Optimization Results
6. Conclusions
- (1)
- The consideration of additional aspects of motor performance as constraints within the optimization algorithms, such as vibration levels and response speeds.
- (2)
- Incorporating hardware experiments based on theoretical analysis to strengthen the persuasiveness of the control strategy and optimization design.
- (3)
- Exploring the integration of the novel sliding mode control strategy with other control approaches.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, Z.; Zhang, T.; Hong, J.; Zhang, H.; Yang, J. Energy Management Strategy of a Novel Parallel Electric-Hydraulic Hybrid Electric Vehicle Based on Deep Reinforcement Learning and Entropy Evaluation. J. Clean. Prod. 2023, 403, 136800. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, T.; Hong, J.; Zhang, H.; Zhao, Q.; Meng, Z. Research on Driving Control Strategy and Fuzzy Logic Optimization of a Novel Mechatronics-Electro-Hydraulic Power Coupling Electric Vehicle. Energy 2021, 233, 121221. [Google Scholar] [CrossRef]
- Sun, Z.; Deng, Y.; Wang, J.; Li, H.; Cao, H. Improved Cascaded Model-Free Predictive Speed Control for PMSM Speed Ripple Minimization Based on Ultra-Local Model. ISA Trans. 2023, 143, 666–677. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Liu, Y.; Wang, Q.; Liao, Y.; Wheeler, P. Speed-Current Single-Loop Control of PMSM Based on Model-Assisted Cascaded Extended State Observer and Sliding Mode Control. Int. J. Circuit Theory Appl. 2024, 52, 3558–3583. [Google Scholar] [CrossRef]
- Kumar, K.B.; Praveen Kumar, K.V. An Enhanced Predictive Current Control Technique for Interior Permanent Magnet Synchronous Motor Drives with Extended Voltage Space Vectors for Electric Vehicles. Int. J. Circuit Theory Appl. 2024, 52, 4234–4253. [Google Scholar] [CrossRef]
- Guo, Q.; Pan, T.; Liu, J.; Chen, S. Explicit Model Predictive Control of Permanent Magnet Synchronous Motors Based on Multi-Point Linearization. Trans. Inst. Meas. Control 2021, 43, 2872–2881. [Google Scholar] [CrossRef]
- Hezzi, A.; Bensalem, Y.; Ben Elghali, S.; Naceur Abdelkrim, M. Sliding Mode Observer Based Sensorless Control of Five Phase PMSM in Electric Vehicle. In Proceedings of the 2019 19th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Sousse, Tunisia, 24–26 March 2019; pp. 530–535. [Google Scholar]
- Houari, A.; Bouabdallah, A.; Djerioui, A.; Machmoum, M.; Auger, F.; Darkawi, A.; Olivier, J.-C.; Benkhoris, M.F. An Effective Compensation Technique for Speed Smoothness at Low-Speed Operation of PMSM Drives. IEEE Trans. Ind. Appl. 2018, 54, 647–655. [Google Scholar] [CrossRef]
- Zhao, K.; Dai, W.; Wu, S.; Qiu, P.; Liu, W.; Huang, G. Improved Super-Twisting-Observer-Based Finite-Control-Set Model-Predictive Fault-Tolerant Current Control of PMSM Considering Demagnetization Fault. Int. J. Electr. Power Energy Syst. 2022, 142, 108325. [Google Scholar] [CrossRef]
- Liu, Y.-C.; Laghrouche, S.; Depernet, D.; Djerdir, A.; Cirrincione, M. Disturbance-Observer-Based Complementary Sliding-Mode Speed Control for PMSM Drives: A Super-Twisting Sliding-Mode Observer-Based Approach. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 5416–5428. [Google Scholar] [CrossRef]
- Zhang, L.; Li, H.; Shan, L.; Zhang, L.; Zhang, L. Double-Hierarchical Fuzzy Exponential Convergence Law Fractional-Order Sliding Mode Control for PMSM Drive Control in EV. Eng. Sci. Technol. Int. J. 2023, 47, 101536. [Google Scholar] [CrossRef]
- Xiuping, W.; Juxin, Z.; Chunyu, Q. Based on the Super-Helical Sliding Mode Algorithm PMLSM Sensorless Control. In Proceedings of the 2024 IEEE 3rd International Conference on Electrical Engineering, Big Data and Algorithms (EEBDA), Changchun, China, 27–29 February 2024; pp. 96–99. [Google Scholar]
- Zhao, K.; Liu, W.; Zhou, R.; Dai, W.; Wu, S.; Qiu, P.; Yin, Y.; Jia, N.; Yi, J.; Huang, G. Model-Free Fast Integral Terminal Sliding-Mode Control Method Based on Improved Fast Terminal Sliding-Mode Observer for PMSM with Unknown Disturbances. ISA Trans. 2023, 143, 572–581. [Google Scholar] [CrossRef]
- Gabbi, T.S.; de Araujo, M.B.; Rocha, L.R.; Scalcon, F.P.; Gründling, H.A.; Vieira, R.P. Discrete-Time Sliding Mode Controller Based on Backstepping Disturbance Compensation for Robust Current Control of PMSM Drives. ISA Trans. 2022, 128, 581–592. [Google Scholar] [CrossRef] [PubMed]
- Huang, M.; Deng, Y.; Li, H.; Wang, J. Torque Ripple Attenuation of PMSM Using Improved Robust Two-Degree-of-Freedom Controller via Extended Sliding Mode Parameter Observer. ISA Trans. 2022, 129, 558–571. [Google Scholar] [CrossRef] [PubMed]
- Shweta, B.; Sadhana, V. Model Predictive Control and Higher Order Sliding Mode Control for Optimized and Robust Control of PMSM. IFAC-PapersOnLine 2022, 55, 195–200. [Google Scholar] [CrossRef]
- Xu, X.; Han, Q. A General Electromagnetic Model and Vibration Control for Shape Deviations in PMSM Supported by Three-Pole Active Magnetic Bearings. Mech. Syst. Signal Process. 2021, 158, 107710. [Google Scholar] [CrossRef]
- Zhang, Q.; Guo, H.; Liu, Y.; Guo, C.; Lu, K.; Wang, D.; Zhang, Z.; Sun, J. Robust Plug-in Repetitive Control for Speed Smoothness of Cascaded-PI PMSM Drive. Mech. Syst. Signal Process. 2022, 163, 108090. [Google Scholar] [CrossRef]
- Obeid, H.; Fridman, L.M.; Laghrouche, S.; Harmouche, M. Barrier Function-Based Adaptive Sliding Mode Control. Automatica 2018, 93, 540–544. [Google Scholar] [CrossRef]
- Cruz-Ancona, C.D.; Fridman, L.; Obeid, H.; Laghrouche, S.; Pérez-Pinacho, C.A. A Uniform Reaching Phase Strategy in Adaptive Sliding Mode Control. Automatica 2023, 150, 110854. [Google Scholar] [CrossRef]
- Cruz-Ancona, C.D.; Estrada, M.A.; Fridman, L. Barrier Function-Based Adaptive Lyapunov Redesign for Systems Without A Priori Bounded Perturbations. IEEE Trans. Autom. Control 2022, 67, 3851–3862. [Google Scholar] [CrossRef]
- González, A.; Ovalle, L.; Fridman, L. Final Set Adjustment in Barrier Function Adaptation Exploiting Properties of Signed Power-Based Controllers. IEEE Trans. Autom. Control 2024, 69, 5486–5491. [Google Scholar] [CrossRef]
- Plestan, F.; Shtessel, Y.; Brégeault, V.; Poznyak, A. New Methodologies for Adaptive Sliding Mode Control. Int. J. Control 2010, 83, 1907–1919. [Google Scholar] [CrossRef]
- Utkin, V.I.; Poznyak, A.S. Adaptive Sliding Mode Control with Application to Super-Twist Algorithm: Equivalent Control Method. Automatica 2013, 49, 39–47. [Google Scholar] [CrossRef]
- Franco, R.; Ríos, H.; de Loza, A.F.; Efimov, D. A Robust Nonlinear Model Reference Adaptive Control for Disturbed Linear Systems: An LMI Approach. IEEE Trans. Autom. Control 2022, 67, 1937–1943. [Google Scholar] [CrossRef]
- Shtessel, Y.; Plestan, F.; Edwards, C.; Levant, A. Adaptive Sliding Mode and Higher Order Sliding-Mode Control Techniques with Applications: A Survey. In Sliding-Mode Control and Variable-Structure Systems: The State of the Art; Oliveira, T.R., Fridman, L., Hsu, L., Eds.; Springer International Publishing: Cham, Switzerland, 2023; pp. 267–305. [Google Scholar]
- Khanh, P.Q.; Anh, H.P.H. Advanced PMSM Speed Control Using Fuzzy PI Method for Hybrid Power Control Technique. Ain Shams Eng. J. 2023, 14, 102222. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, L.; Wang, D.; Lu, K. A Smith-Predictor-Assisted Adaptive Load Disturbance Rejection Controller for Speed Variation Suppression of PMSM Drive. Int. J. Electr. Power Energy Syst. 2024, 155, 109666. [Google Scholar] [CrossRef]
- Xu, G.; Luo, K.; Jing, G.; Yu, X.; Ruan, X.; Song, J. On Convergence Analysis of Multi-Objective Particle Swarm Optimization Algorithm. Eur. J. Oper. Res. 2020, 286, 32–38. [Google Scholar] [CrossRef]
- Verma, S.; Pant, M.; Snasel, V. A Comprehensive Review on NSGA-II for Multi-Objective Combinatorial Optimization Problems. IEEE Access 2021, 9, 57757–57791. [Google Scholar] [CrossRef]
- Gao, Y.; Yang, T.; Bozhko, S.; Wheeler, P.; Dragicevic, T.; Gerada, C. Neural Network Aided PMSM Multi-Objective Design and Optimization for More-Electric Aircraft Applications. Chin. J. Aeronaut. 2022, 35, 233–246. [Google Scholar] [CrossRef]
- Srivastava, A. An Application of Kho-Kho Optimization Algorithm to Estimation Parameter of Permanent Magnet Synchronous Machine. E-Prime-Adv. Electr. Eng. Electron. Energy 2023, 6, 100309. [Google Scholar] [CrossRef]
- Yousri, D.; Allam, D.; Eteiba, M.B. Chaotic Whale Optimizer Variants for Parameters Estimation of the Chaotic Behavior in Permanent Magnet Synchronous Motor. Appl. Soft Comput. 2019, 74, 479–503. [Google Scholar] [CrossRef]
- Sun, C.; Wen, F.; Xiong, W.; Wang, H.; Shang, H. Multi-Objective Comprehensive Teaching Algorithm for Multi-Objective Optimisation Design of Permanent Magnet Synchronous Motor. IET Electr. Power Appl. 2020, 14, 2564–2576. [Google Scholar] [CrossRef]
- Wang, B.; Zhu, J.; Li, Z.; Li, Y. An Optimization Algorithm Used in PMSM Model Predictive Control. IEICE Electron. Express 2024, 21, 20230444. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, H.; Yang, J.; Zhang, T.; Zhang, C.; Bo, L. A Path Planning Algorithm for Three-Dimensional Collision Avoidance Based on Potential Field and B-Spline Boundary Curve. Aerosp. Sci. Technol. 2024, 144, 108763. [Google Scholar] [CrossRef]
- Elsherbiny, H.; Szamel, L.; Ahmed, M.K.; Elwany, M.A. High Accuracy Modeling of Permanent Magnet Synchronous Motors Using Finite Element Analysis. Mathematics 2022, 10, 3880. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Value |
|---|---|
| Population size | 10 |
| Generational scale | 20 |
| Crossover probability | 0.9 |
| Cross-distribution index | 10 |
| Variation distribution index | 20 |
| Parameter Name | Value |
|---|---|
| Maximum Iterations | 20 |
| Number of Particles | 10 |
| Inertia | 0.9 |
| Global Increment | 0.9 |
| Particle Increment | 0.9 |
| Maximum Velocity | 0.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, L.; Zhang, H.; Zhang, T.; Wang, J.; Yang, C.; Zhang, Z. Adaptive Control Parameter Optimization of Permanent Magnet Synchronous Motors Based on Super-Helical Sliding Mode Control. Appl. Sci. 2024, 14, 10967. https://doi.org/10.3390/app142310967
Kong L, Zhang H, Zhang T, Wang J, Yang C, Zhang Z. Adaptive Control Parameter Optimization of Permanent Magnet Synchronous Motors Based on Super-Helical Sliding Mode Control. Applied Sciences. 2024; 14(23):10967. https://doi.org/10.3390/app142310967
Chicago/Turabian StyleKong, Lingtao, Hongxin Zhang, Tiezhu Zhang, Junyi Wang, Chaohui Yang, and Zhen Zhang. 2024. "Adaptive Control Parameter Optimization of Permanent Magnet Synchronous Motors Based on Super-Helical Sliding Mode Control" Applied Sciences 14, no. 23: 10967. https://doi.org/10.3390/app142310967
APA StyleKong, L., Zhang, H., Zhang, T., Wang, J., Yang, C., & Zhang, Z. (2024). Adaptive Control Parameter Optimization of Permanent Magnet Synchronous Motors Based on Super-Helical Sliding Mode Control. Applied Sciences, 14(23), 10967. https://doi.org/10.3390/app142310967