
Research on the Impact of Non-Uniform and Frequency-Dependent Normal Contact Stiffness on the Vibrational Response of Plate Structures

Abstract
:1. Introduction
2. Basic Theory
2.1. Contact Stiffness
2.2. Experimental Modal Analysis
2.2.1. Theoretical Modal Analysis
2.2.2. Experimental Modal Analysis
2.3. BUSH Element and the Equivalent Dynamic Model of Normal Contact Stiffness
3. Experimental and Simulation Analysis of Normal Contact Stiffness in Bolted Flat Plate Structures
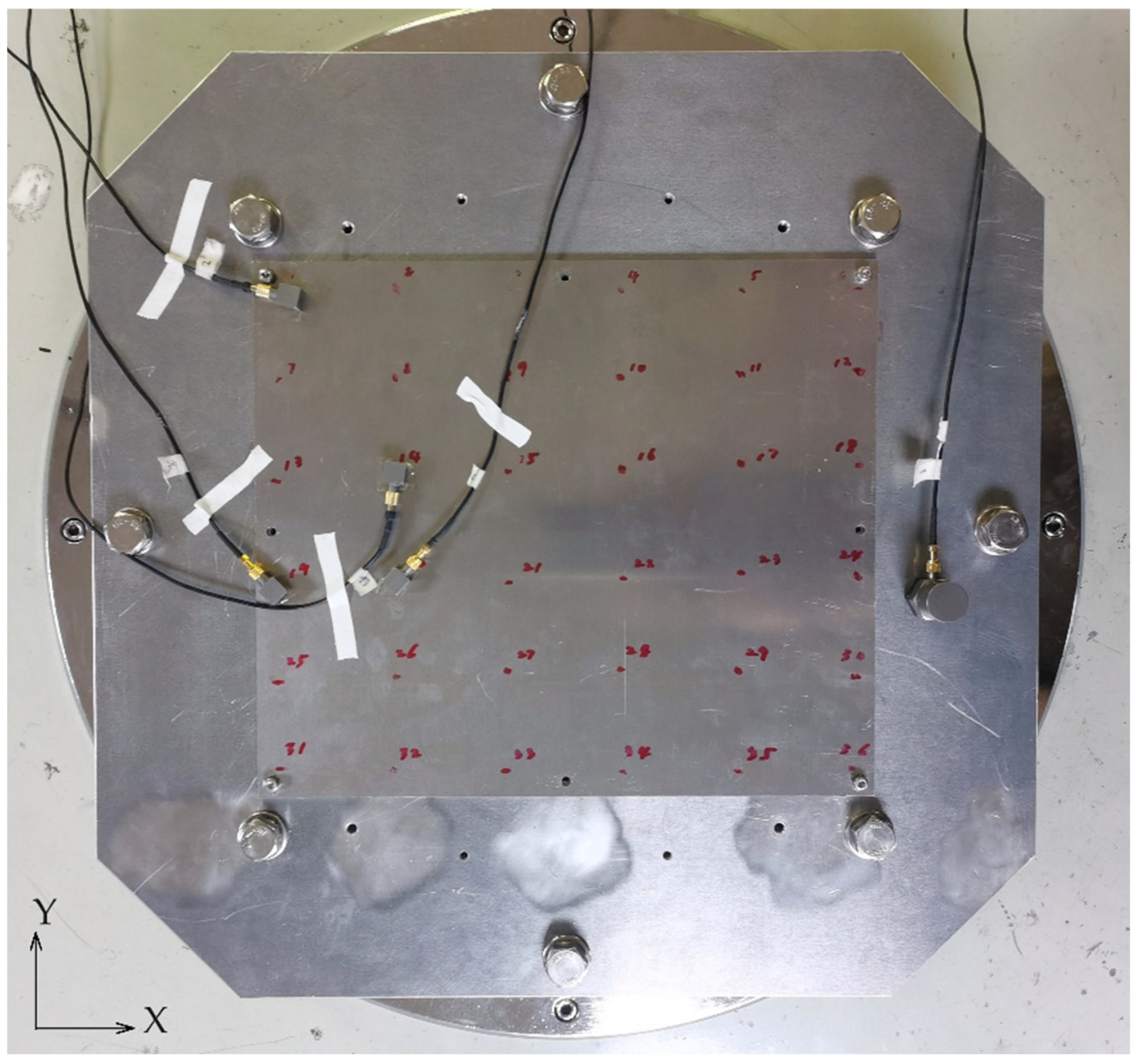
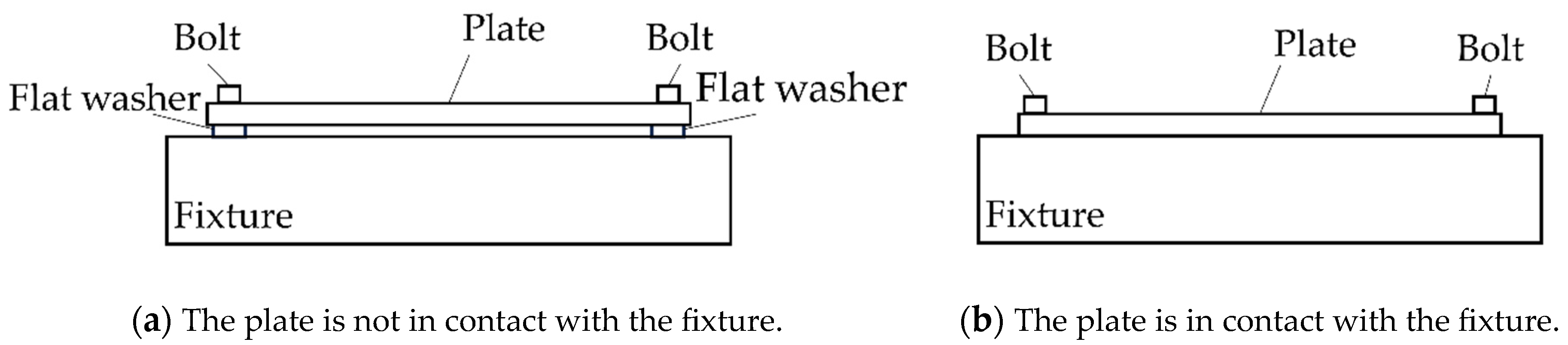
3.1. Experimental Modal Testing of Different Contact States in Bolted Flat Plate Structures
3.2. Modeling and Analysis of Contact Stiffness for Different States of the Flat Plate Structure
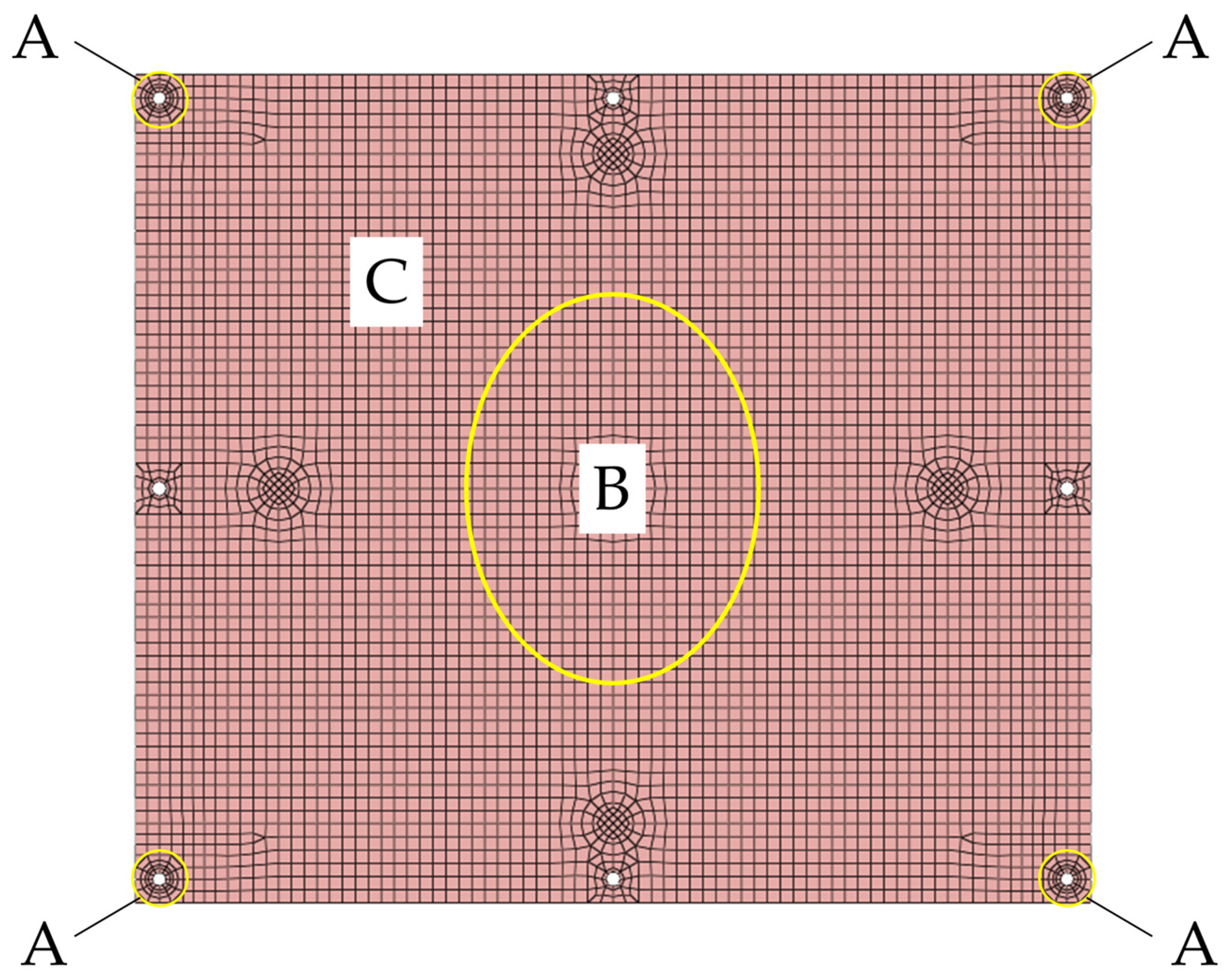
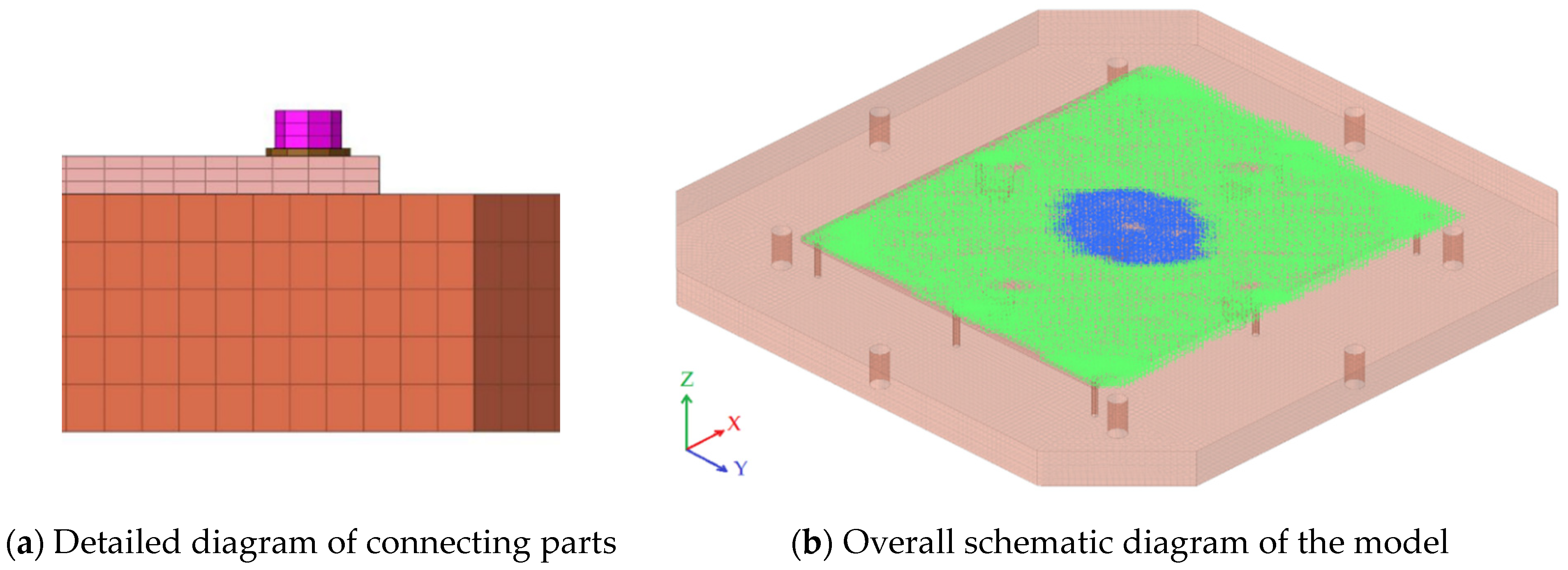
3.2.1. Modeling and Analysis of Normal Contact Stiffness Considering Distribution Non-Uniformity and Frequency-Dependent Characteristics
3.2.2. The Simulation Results Obtained by Traditional Modeling Methods and Considering Tangential Contact Stiffness
4. Conclusions
- (1)
- This paper designed a flat plate structure and conducted modal tests under two different working conditions: the contact working conditions and the non-contact working conditions. The results show that the normal contact stiffness on the interface not only significantly increases the fundamental frequency of the flat plate but also changes the modal mode of the fundamental frequency.
- (2)
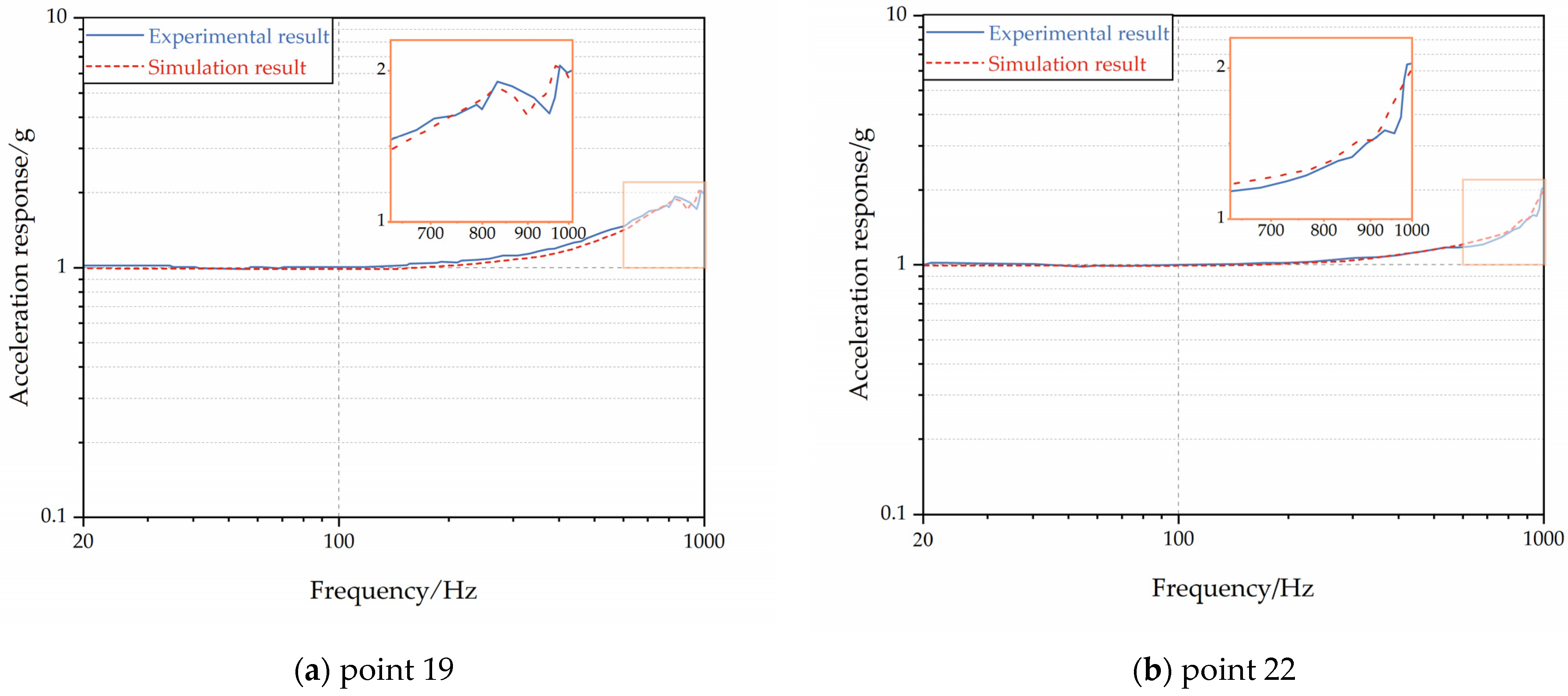
- The analysis method for the normal contact stiffness of mechanical interface proposed in this paper considers both the distribution and frequency-dependent properties of the normal contact stiffness. The application of this method in simulations has successfully achieved a good match between the modal vibration shapes, frequency response curves, and experimental results within the 0–1000 Hz range.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Farhad, M.; Majid, M.; Aref, A. Nonlinear behavior of single bolted flange joints: A novel analytical model. Eng. Struct. 2018, 173, 908–917. [Google Scholar] [CrossRef]
- Bograd, S.; Reuss, P.; Schmidt, A.; Gaul, L.; Mayer, M. Modeling the dynamics of mechanical joints. Mech. Syst. Signal Proc. 2011, 25, 2801–2826. [Google Scholar] [CrossRef]
- Ibrahim, R.A.; Pettit, C.L. Uncertainties and dynamic problems of bolted joints and other fasteners. J. Sound Vibr. 2005, 279, 857–936. [Google Scholar] [CrossRef]
- Luan, Y.; Guan, Z.Q.; Cheng, G.D.; Liu, S. A simplified nonlinear dynamic model for the analysis of pipe structures with bolted flange joints. J. Sound Vibr. 2012, 331, 325–344. [Google Scholar] [CrossRef]
- Tian, H.; Li, B.; Liu, H.; Mao, K.; Peng, F.; Huang, X. A new method of virtual material hypothesis-based dynamic modeling on fixed joint interface in machine tools. Int. J. Mach. Tools Manuf. 2011, 51, 239–249. [Google Scholar] [CrossRef]
- Zhao, G.; Xiong, Z.; Jin, X.; Hou, L.; Gao, W. Prediction of contact stiffness in bolted interface with natural frequency experiment and FE analysis. Tribol. Int. 2018, 127, 157–164. [Google Scholar] [CrossRef]
- Liao, J.; Zhang, J.; Feng, P.; Yu, D.; Wu, Z. Interface contact pressure-based virtual gradient material model for the dynamic analysis of the bolted joint in machine tools. J. Mech. Sci. Technol. 2016, 30, 4511–4521. [Google Scholar] [CrossRef]
- Yang, Y.; Cheng, H.; Liang, B.; Di, Z.; Junshan, H.U.; Zhang, K. A novel virtual material layer model for predicting natural frequencies of composite bolted joints. Chin. J. Aeronaut. 2021, 34, 101–111. [Google Scholar] [CrossRef]
- Zhao, Y.; Yang, C.; Cai, L.; Shi, W.; Liu, Z. Surface contact stress-based nonlinear virtual material method for dynamic analysis of bolted joint of machine tool. Precis. Eng.-J. Int. Soc. Precis. Eng. Nanotechnol. 2016, 43, 230–240. [Google Scholar] [CrossRef]
- Grzejda, R. Finite element modeling of the contact of elements preloaded with a bolt and externally loaded with any force. J. Comput. Appl. Math. 2021, 393, 113534. [Google Scholar] [CrossRef]
- Belardi, V.G.; Fanelli, P.; Vivio, F. Analysis of multi-bolt composite joints with a user-defined finite element for the evaluation of load distribution and secondary bending. Compos. Pt. B-Eng. 2021, 227, 109378. [Google Scholar] [CrossRef]
- Liu, X.; Sun, W.; Liu, H.; Du, D.; Ma, H. Nonlinear vibration modeling and analysis of bolted thin plate based on non-uniformly distributed complex spring elements. J. Sound Vibr. 2022, 527, 116883. [Google Scholar] [CrossRef]
- Xing, W.C.; Wang, Y.Q. Modeling and vibration analysis of bolted joint multi-plate structures with general boundary conditions. Eng. Struct. 2023, 281, 115813. [Google Scholar] [CrossRef]
- Liu, H.; Sun, W.; Du, D.; Liu, X. Modeling and free vibration analysis for bolted composite plate under inconsistent pre-tightening condition. Compos. Struct. 2022, 292, 115634. [Google Scholar] [CrossRef]
- Han, Q.K.; Wang, J.J.; Li, Q.H. Theoretical analysis of the natural frequency of a geared system under the influence of a variable mesh stiffness. Proc. Inst. Mech. Eng. Part D 2009, 223, 221–231. [Google Scholar] [CrossRef]
- Wei, K.; Wang, P.; Yang, F.; Xiao, J. The effect of the frequency-dependent stiffness of rail pad on the environment vibrations induced by subway train running in tunnel. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2016, 230, 171–178. [Google Scholar] [CrossRef]
- Zhu, S.Y.; Cai, C.B.; Luo, Z.; Liao, Z.Q. A frequency and amplitude dependent model of rail pads for the dynamic analysis of train-track interaction. Sci. China-Technol. Sci. 2015, 58, 191–201. [Google Scholar] [CrossRef]
- Zhu, S.Y.; Cai, C.B.; Spanos, P.D. A nonlinear and fractional derivative viscoelastic model for rail pads in the dynamic analysis of coupled vehicle-slab track systems. J. Sound Vibr. 2015, 335, 304–320. [Google Scholar] [CrossRef]
- Jorobata, Y.; Kono, D. Cutter mark cross method for improvement of contact stiffness by controlling distribution of real contact area. Precis. Eng.-J. Int. Soc. Precis. Eng. Nanotechnol. 2020, 63, 197–205. [Google Scholar] [CrossRef]
- Zhang, C.; Yu, W.; Yin, L.; Zeng, Q.; Chen, Z.; Shao, Y. Modeling of normal contact stiffness for surface with machining textures and analysis of its influencing factors. Int. J. Solids Struct. 2023, 262, 112042. [Google Scholar] [CrossRef]
- Fukagai, S.; Marshall, M.B.; Lewis, R. Transition of the friction behaviour and contact stiffness due to repeated high-pressure contact and slip. Tribol. Int. 2022, 170, 107487. [Google Scholar] [CrossRef]
- Wang, R.; Zhu, L.; Zhu, C. Research on fractal model of normal contact stiffness for mechanical joint considering asperity interaction. Int. J. Mech. Sci. 2017, 134, 357–369. [Google Scholar] [CrossRef]
- Li, H.Q.; Li, B.; Mao, K.; Huang, X.; Peng, F. A Parameterized Model of Bolted Joints in Machine Tools. Int. J. Acoust. Vib. 2014, 19, 10–20. [Google Scholar] [CrossRef]
- Li, X.Q.; Pang, J.; Yang, L.; Jia, X.L.; Lu, G.; Yin, Z.H.; Shangguan, W.B. Finite Element Model refinement of powertrain mount brackets for estimating natural frequencies. Proc. Inst. Mech. Eng. Part D-J. Automob. Eng. 2024, 238, 32–45. [Google Scholar] [CrossRef]
- Zhang, H.; Huang, W.; Liu, B.; Li, S.; Li, Q.; Mao, L. Numerical analysis of a prefabricated concrete beam-to-column connection with bolted end plates. Structures 2024, 59, 105778. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Elastic Modulus/MPa | Poisson’s Ratio | Density/(kg·m−3) |
|---|---|---|---|
| aluminum alloy | 70,000 | 0.33 | 2770 |
| stainless steel | 200,000 | 0.3 | 7980 |
| Non-Contact Condition | Contact Condition | |
|---|---|---|
 116.9 Hz |  811.9 Hz |  964.5 Hz |
| Modal Order | Experimental Mode | Simulated Mode | Frequency Error |
|---|---|---|---|
| 1 |  116.9 Hz |  121.3 Hz | 3.6% |
| 2 |  256 Hz |  240.1 Hz | −6.2% |
| 3 |  279.2 Hz |  288.4 Hz | 3.2% |
| 4 |  339.9 Hz |  321.5 Hz | −5.4% |
| 5 |  598.8 Hz |  584.8 Hz | −2.4% |
| 6 |  620.6 Hz |  624.9 Hz | 0.7% |
| Experimental Mode | Simulated Mode | Frequency Error |
|---|---|---|
 811.9 Hz |  811.3 Hz | −0.07% |
 964.5 Hz |  966.3 Hz | 0.19% |
| Modeling Method | Modal Mode |
|---|---|
| The entire interface’s contact stiffness was equivalent to the area under bolt connection pressure. |  |
| The entire interface’s contact stiffness was evenly distributed. |  |
| Modeling Method | Modal Mode |
|---|---|
| X tangential contact stiffness |  |
| Y tangential contact stiffness |  |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, C.; Fan, W.-J.; Wang, D.-M.; Zhang, W.-Z. Research on the Impact of Non-Uniform and Frequency-Dependent Normal Contact Stiffness on the Vibrational Response of Plate Structures. Appl. Sci. 2024, 14, 3121. https://doi.org/10.3390/app14073121
Yan C, Fan W-J, Wang D-M, Zhang W-Z. Research on the Impact of Non-Uniform and Frequency-Dependent Normal Contact Stiffness on the Vibrational Response of Plate Structures. Applied Sciences. 2024; 14(7):3121. https://doi.org/10.3390/app14073121
Chicago/Turabian StyleYan, Chang, Wen-Jie Fan, Da-Miao Wang, and Wen-Zhang Zhang. 2024. "Research on the Impact of Non-Uniform and Frequency-Dependent Normal Contact Stiffness on the Vibrational Response of Plate Structures" Applied Sciences 14, no. 7: 3121. https://doi.org/10.3390/app14073121