
The Application of Laser-Scanning 3D Model Reconstruction Technology for Visualizing a Decommissioning Model of the Heavy Water Research Reactor

 ,
,
Abstract
:1. Introduction
2. A Brief Introduction to Laser-Scanning 3D Model Reconstruction Technology
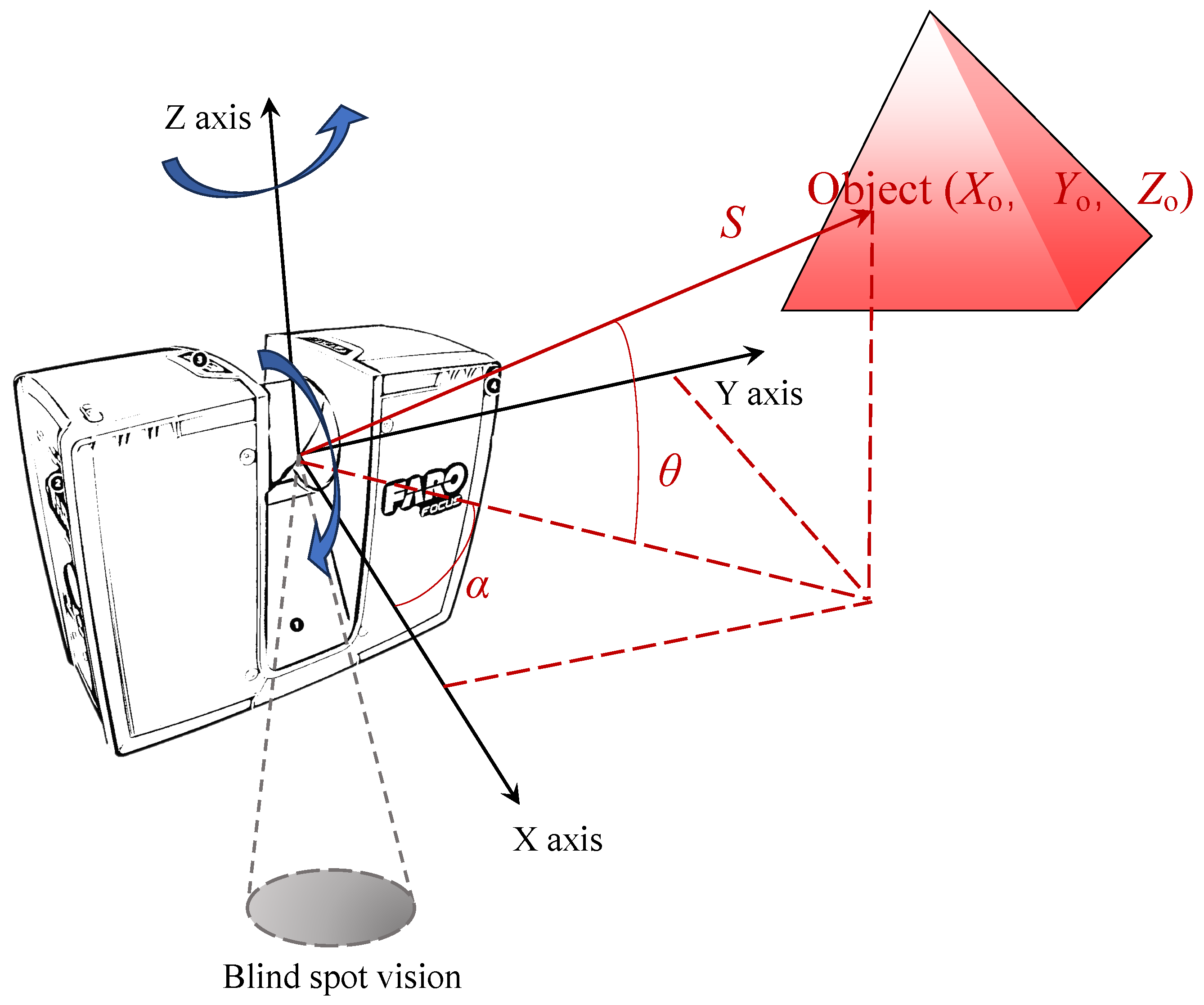
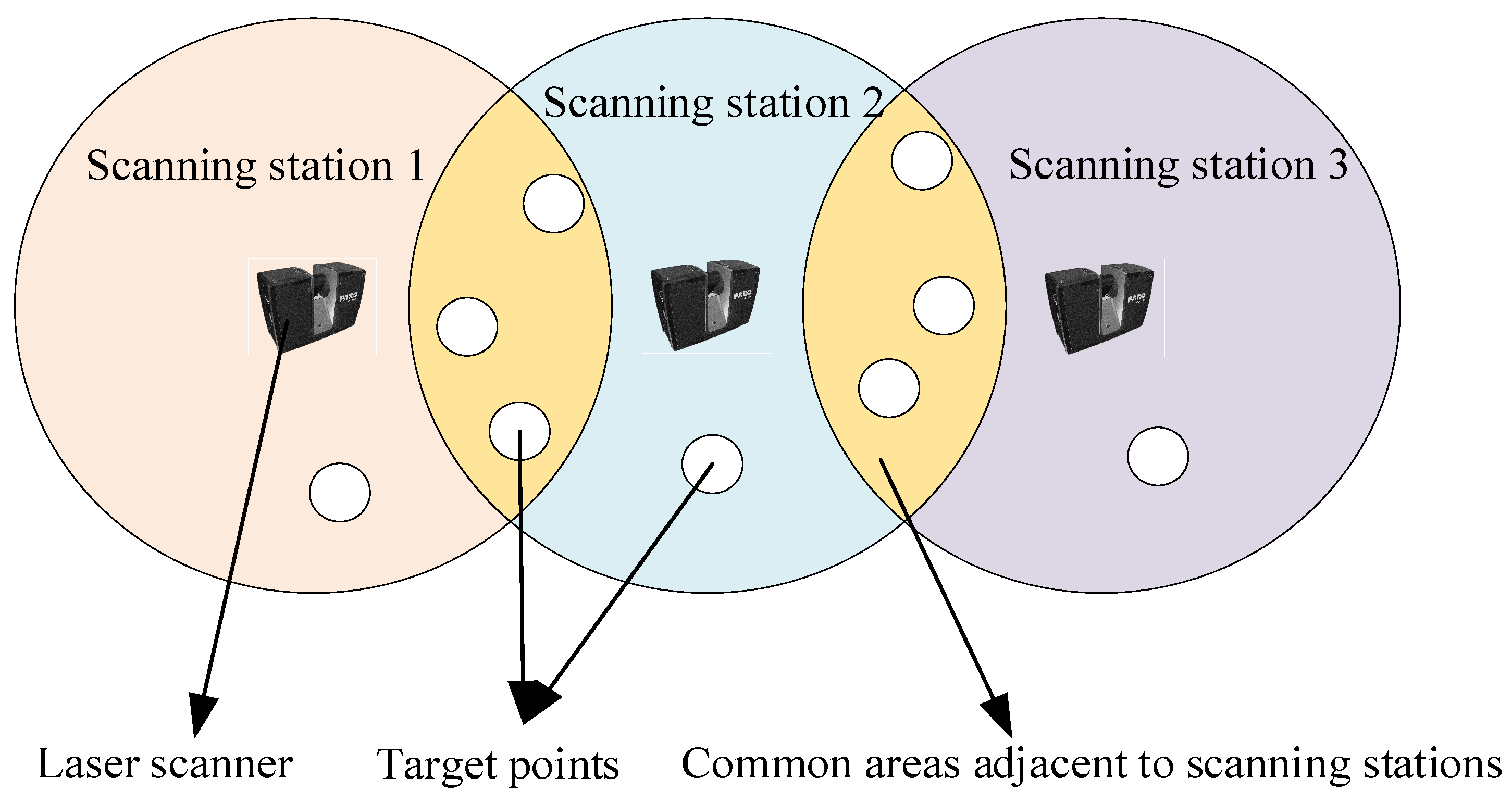
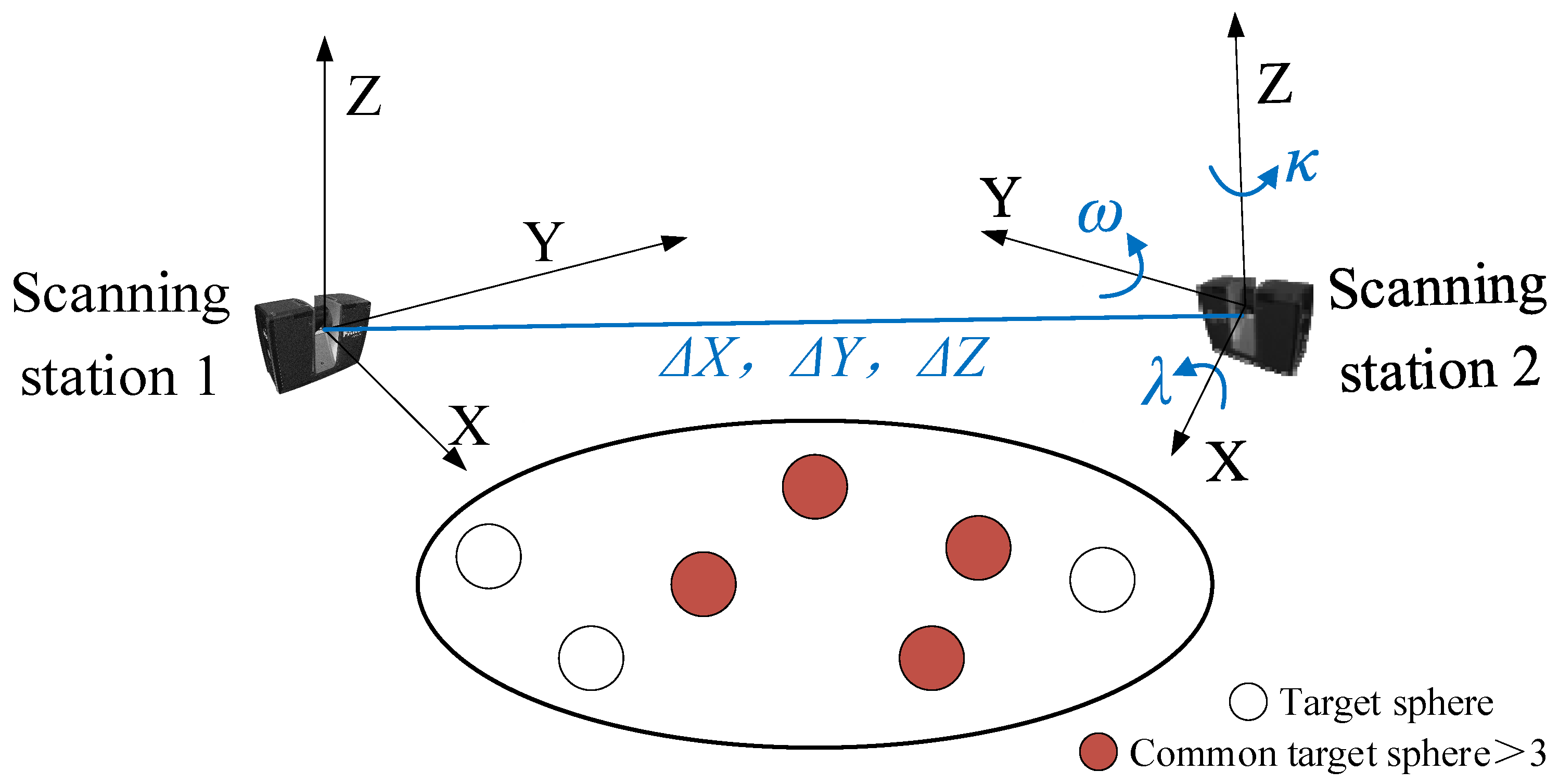
2.1. Principle of 3D Laser-Scanning Technology
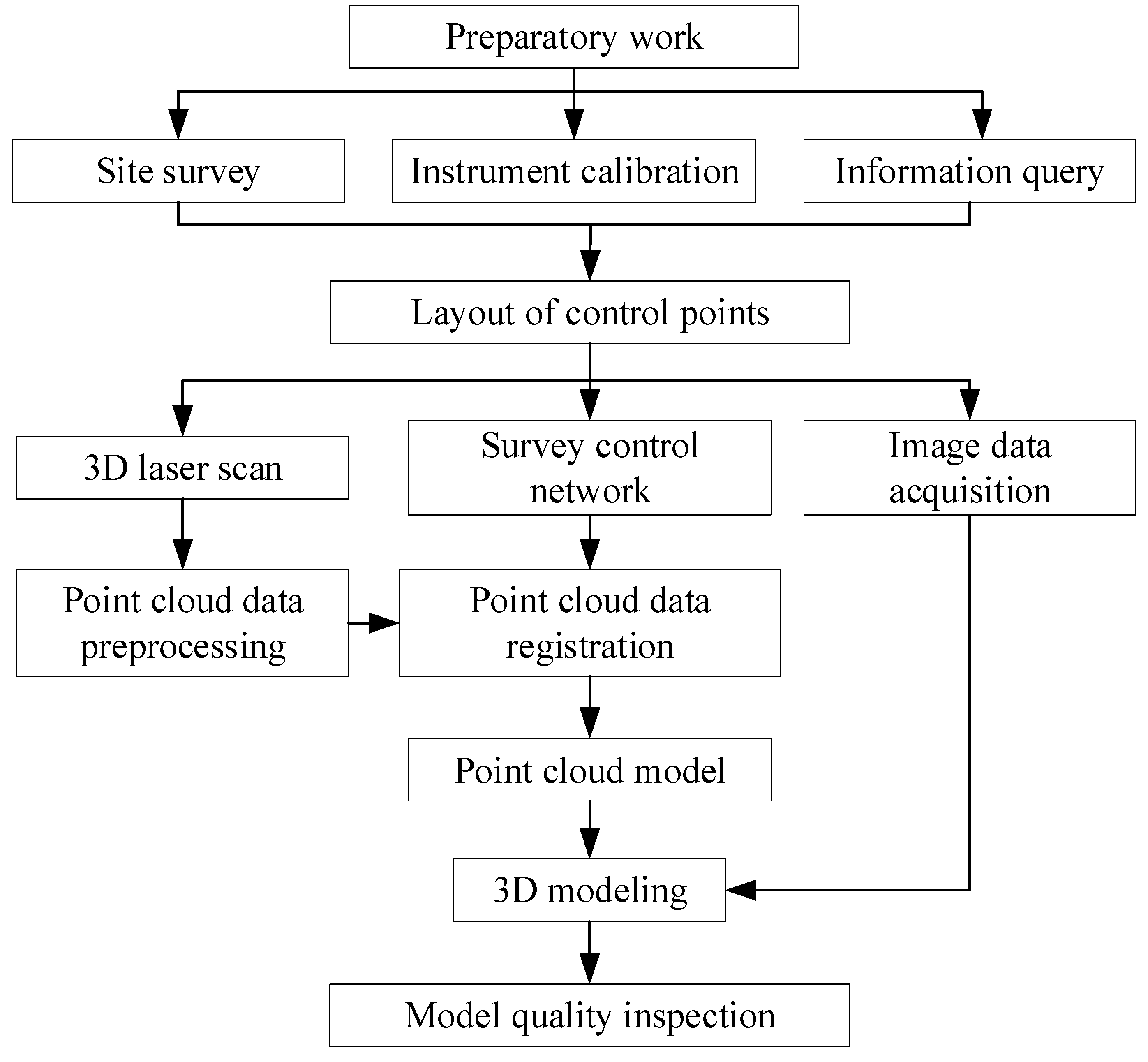
2.2. A Brief Description of the Laser-Scanning 3D Model Reconstruction Process
2.2.1. On-Site Preparation
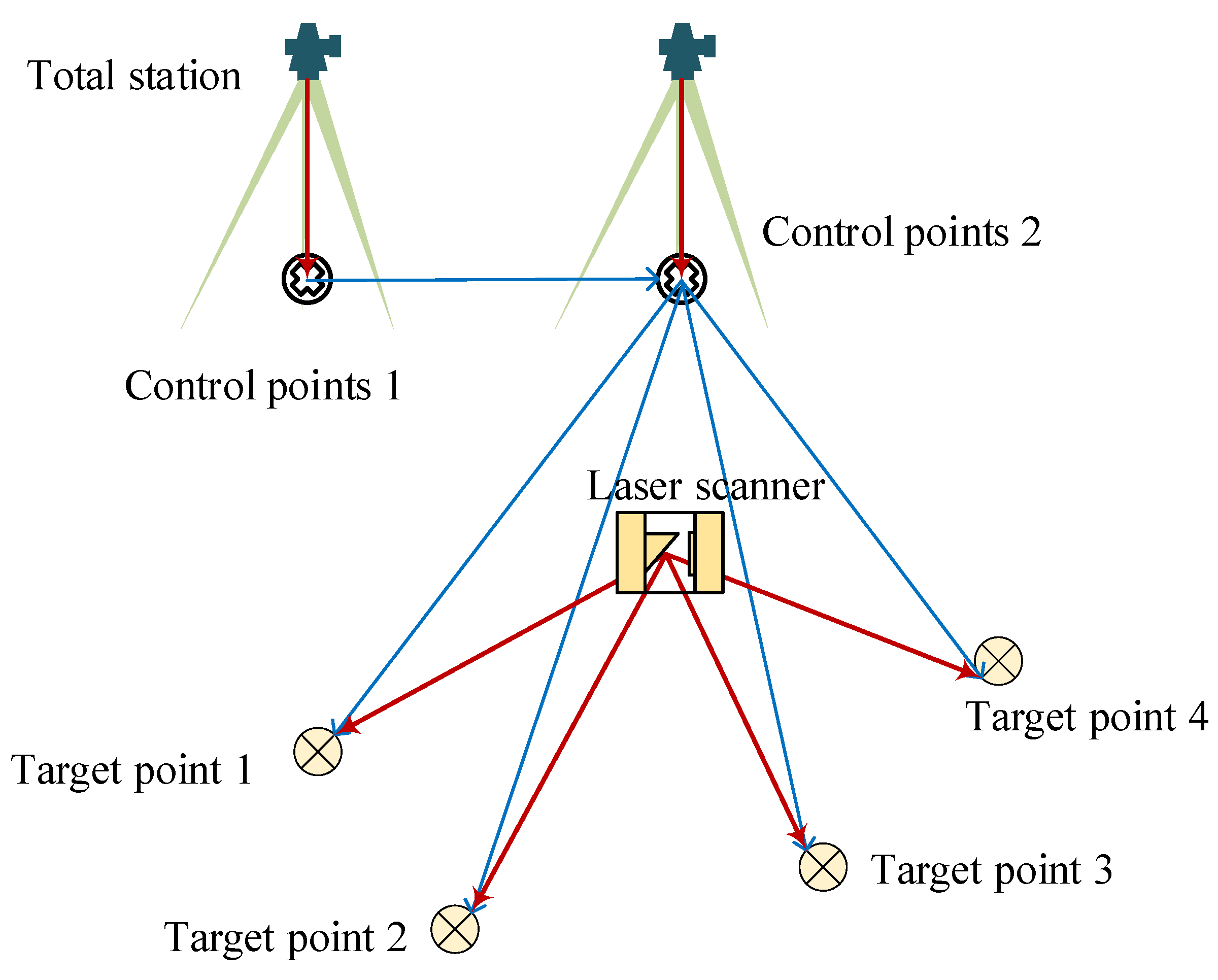
2.2.2. Point Cloud Data Acquisition
2.2.3. Point Cloud Data Processing
2.2.4. Model Reconstruction
3. Application in the Reconstruction of the HWRR Decommissioning Model
3.1. Main Technical Parameters
3.2. Equipment and Main Parameters
3.3. On-Site Preparation for the HWRR Decommissioning Area
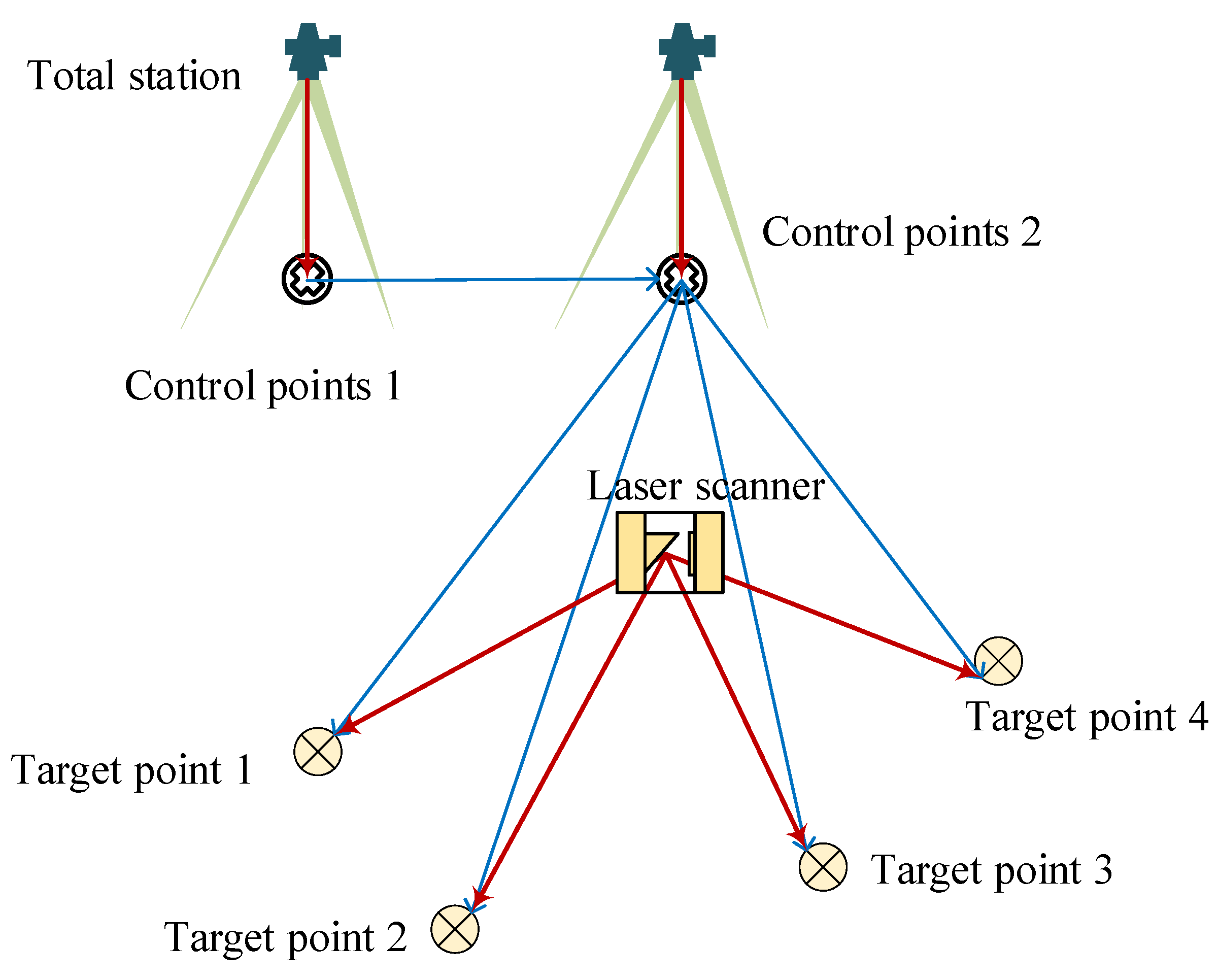
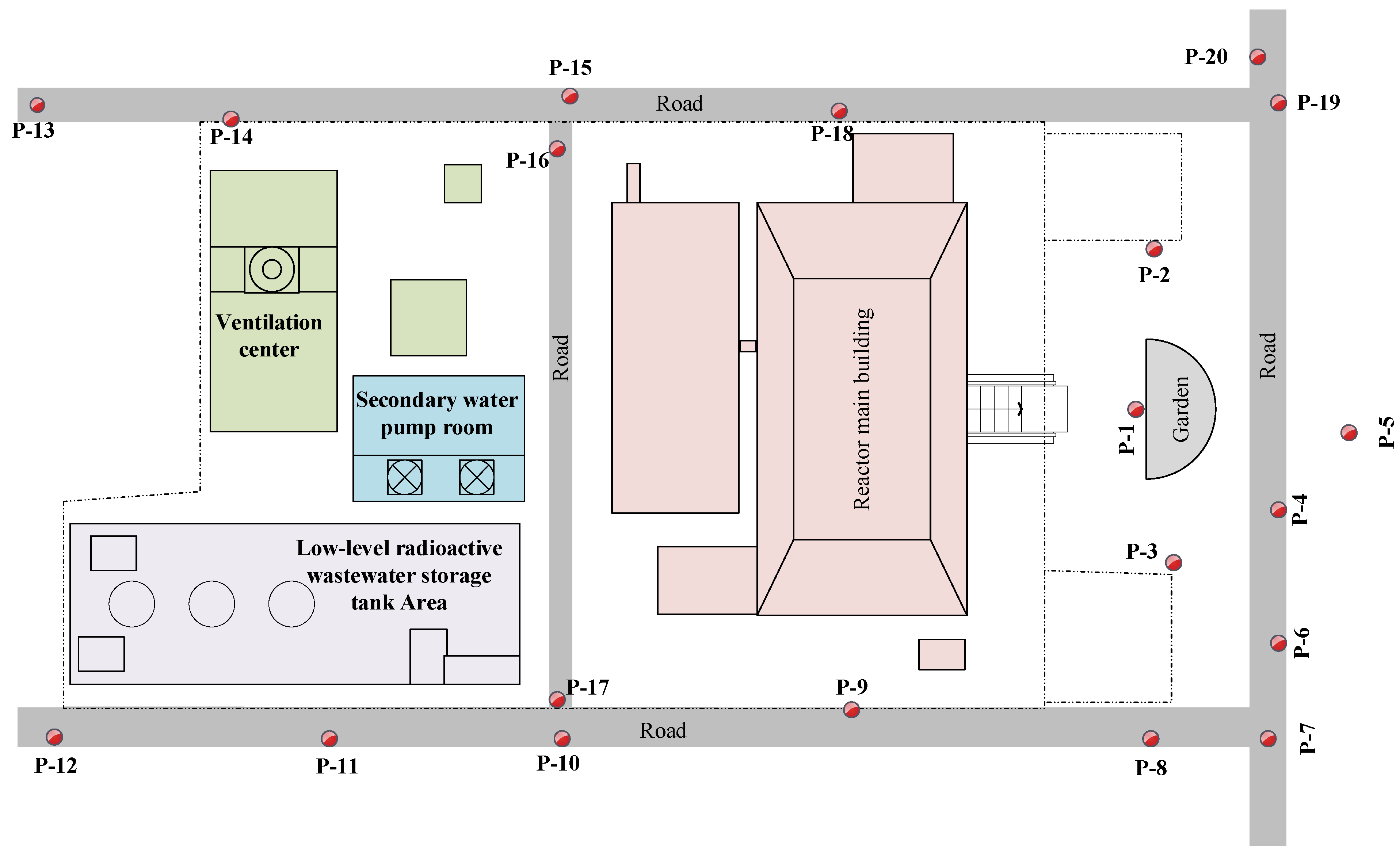
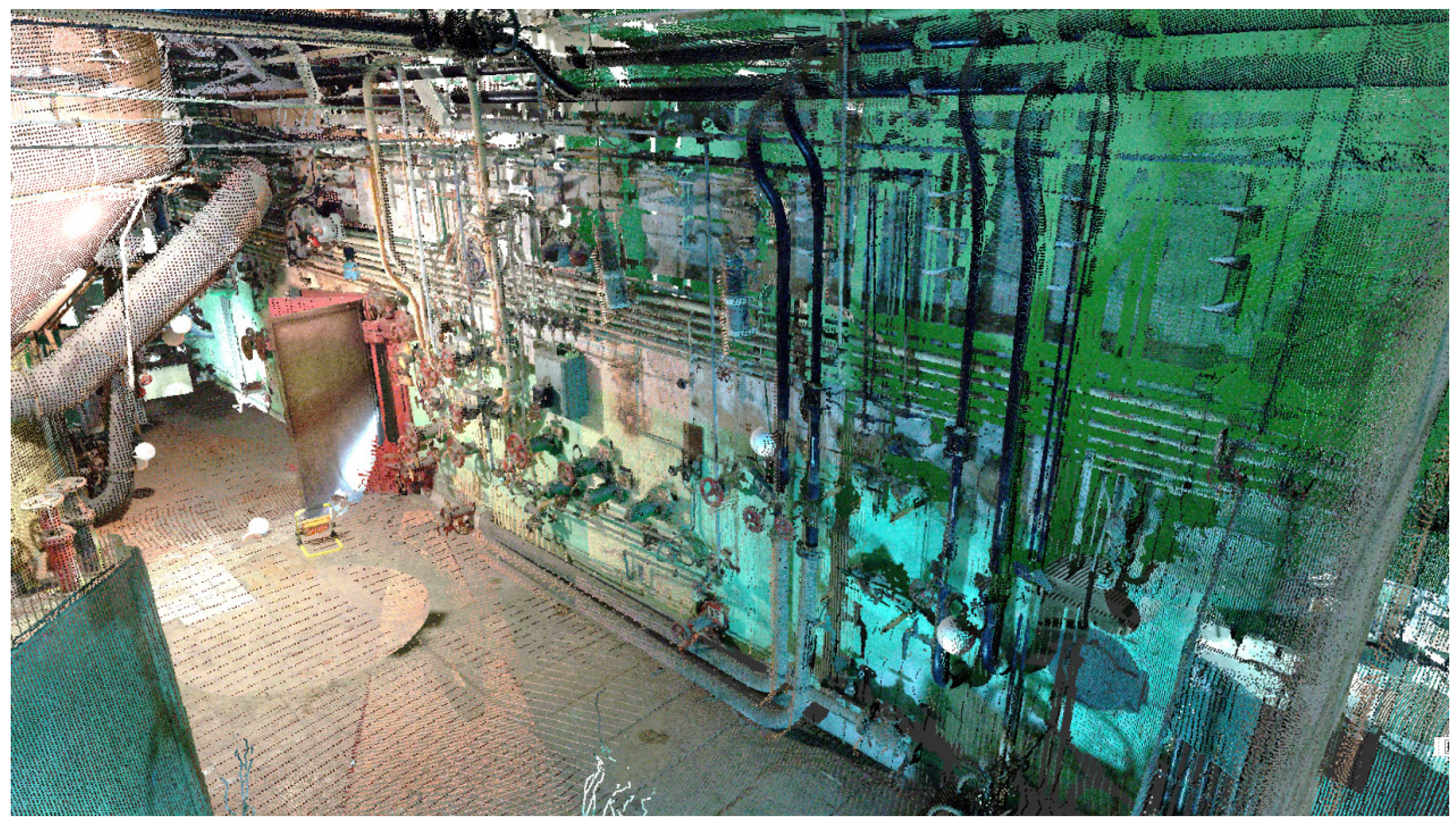
3.4. Point Cloud Data Acquisition for the HWRR Decommissioning Area
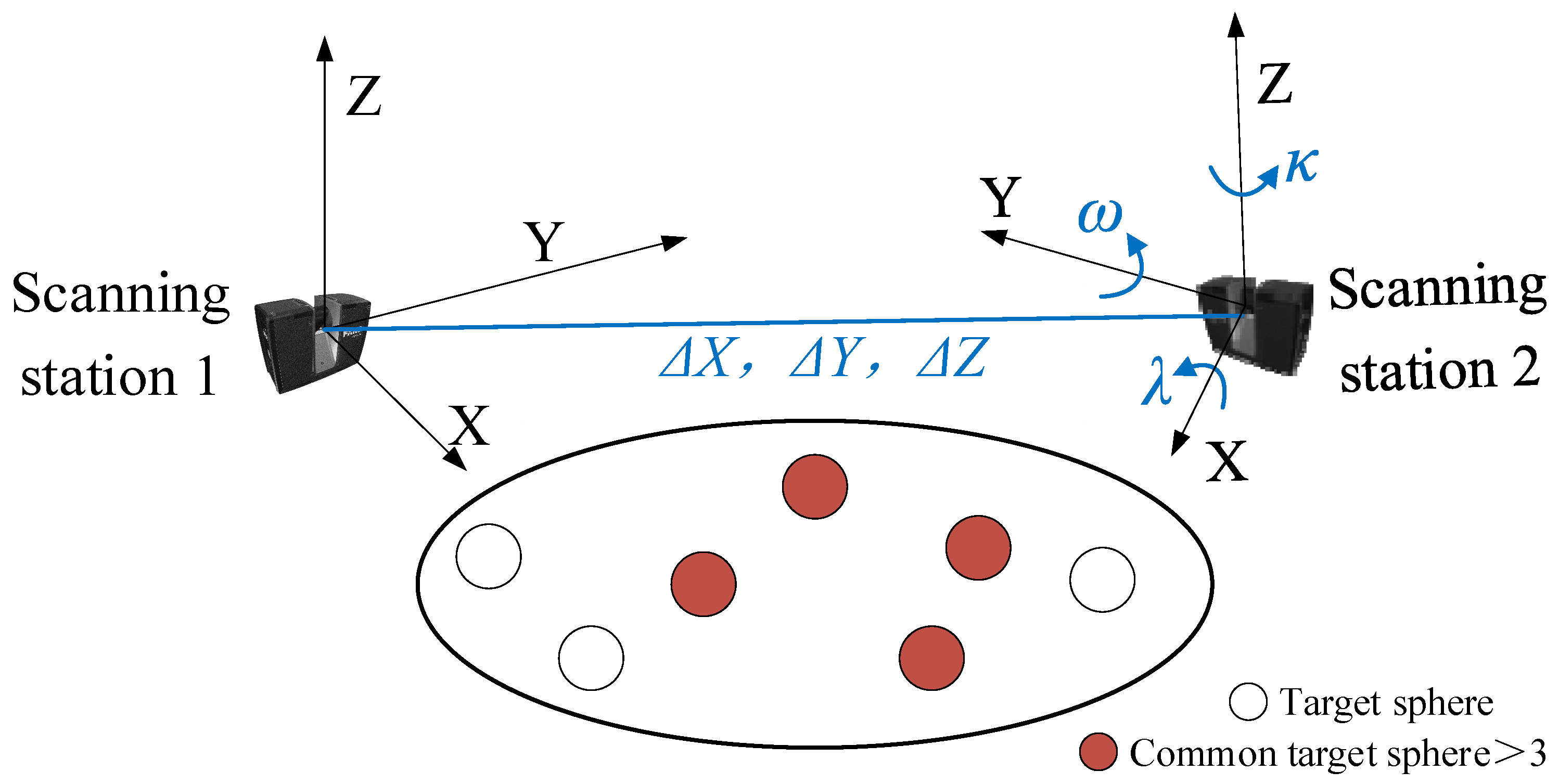
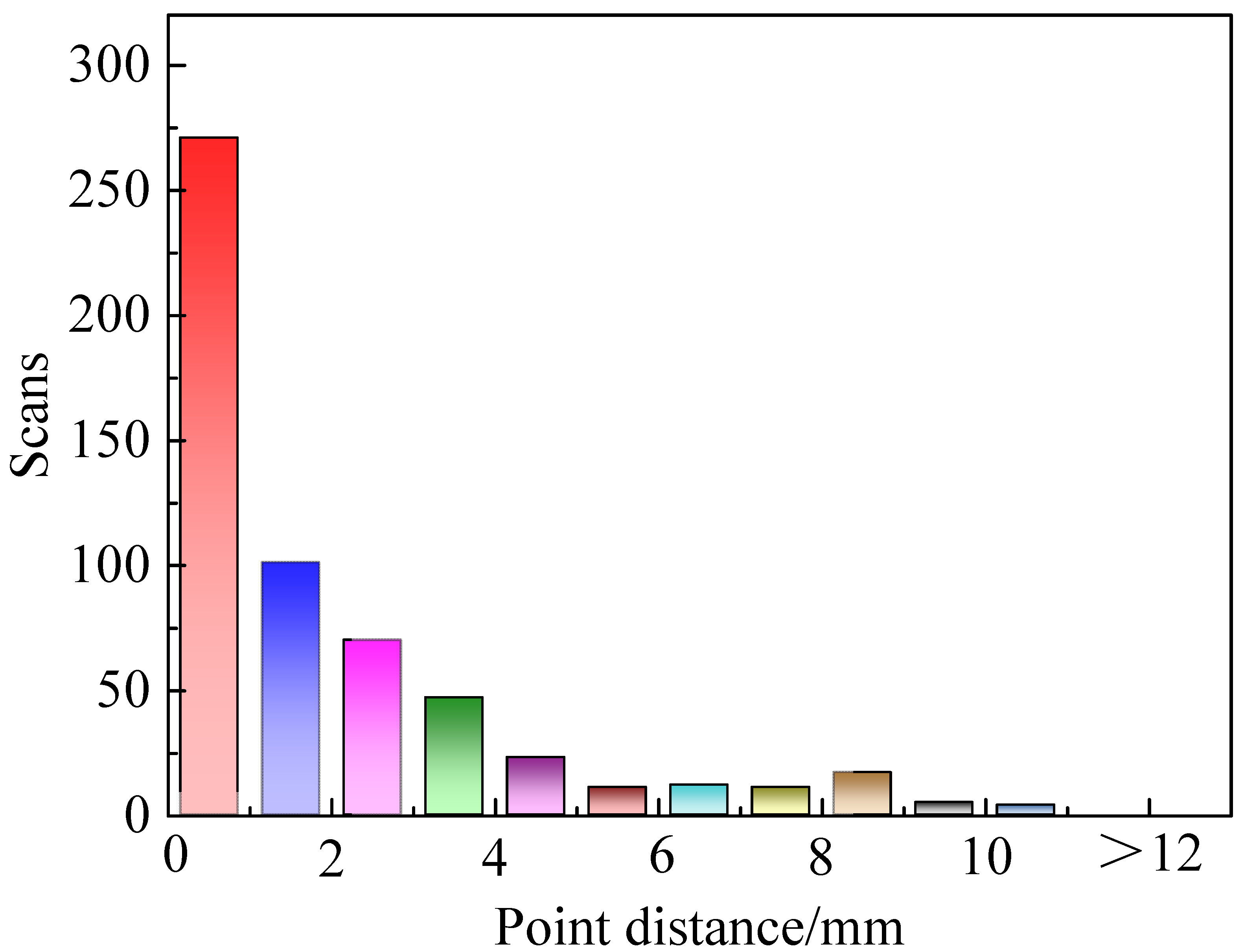
3.5. Point Cloud Data Processing for the HWRR Decommissioning Area
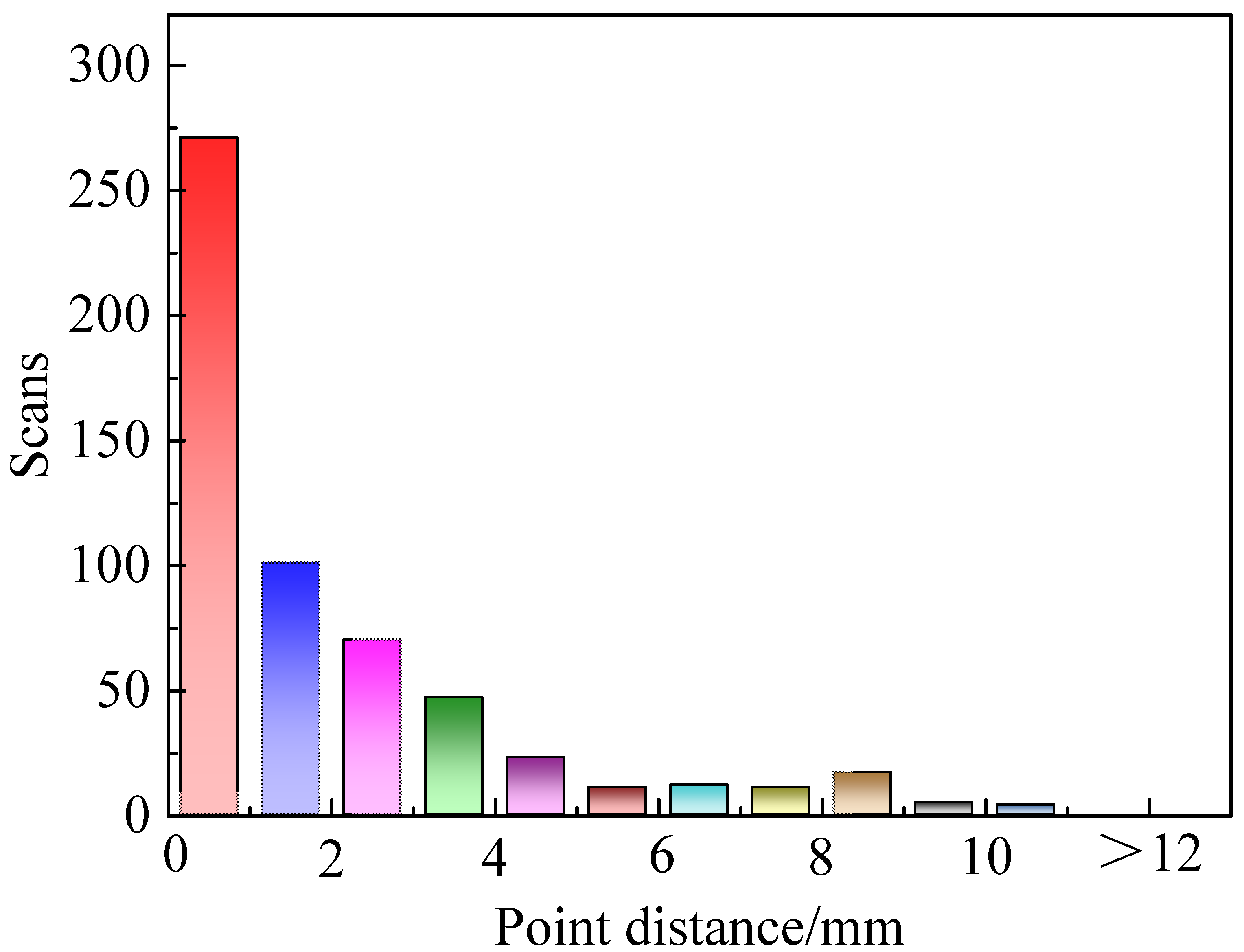
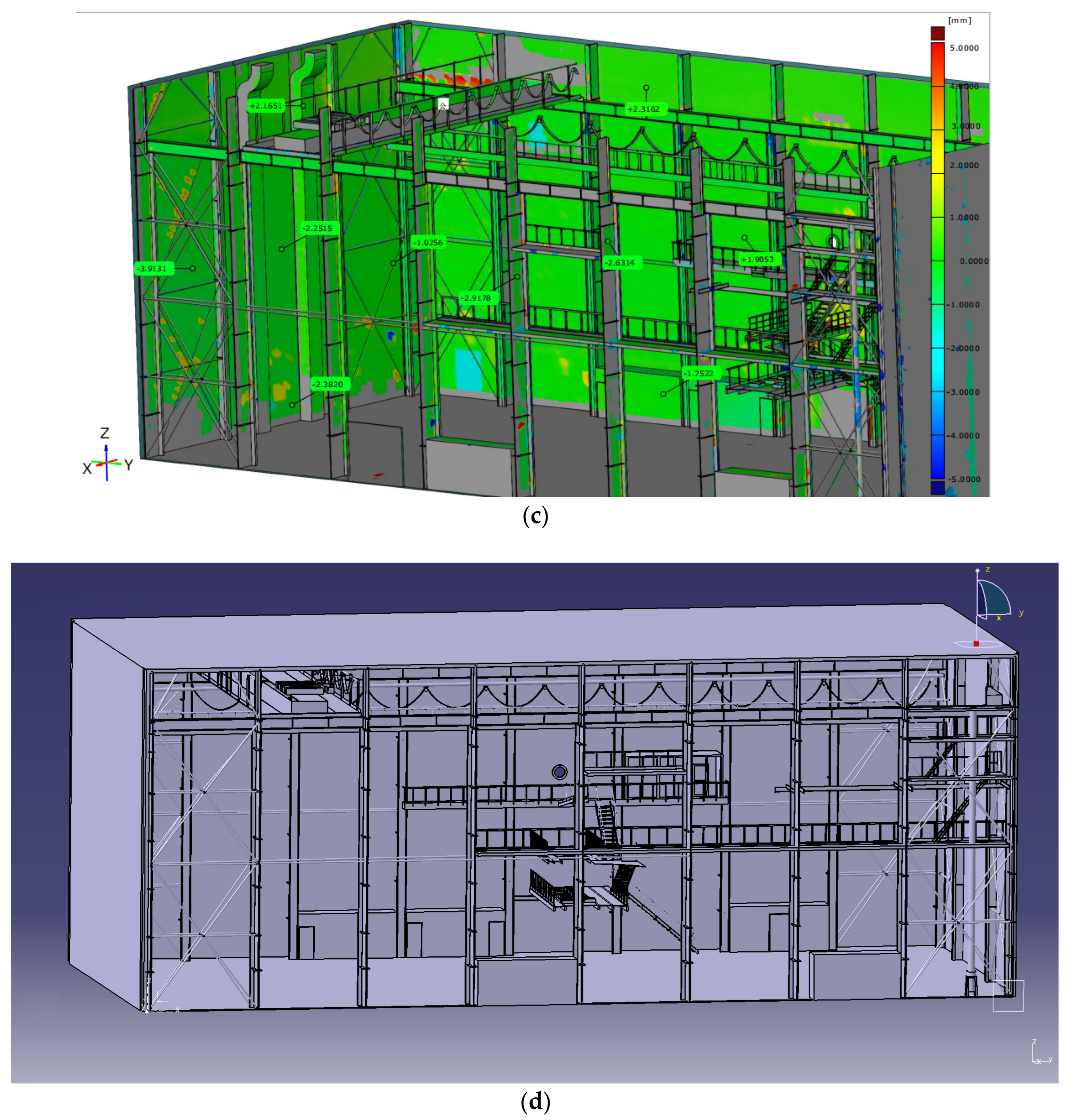
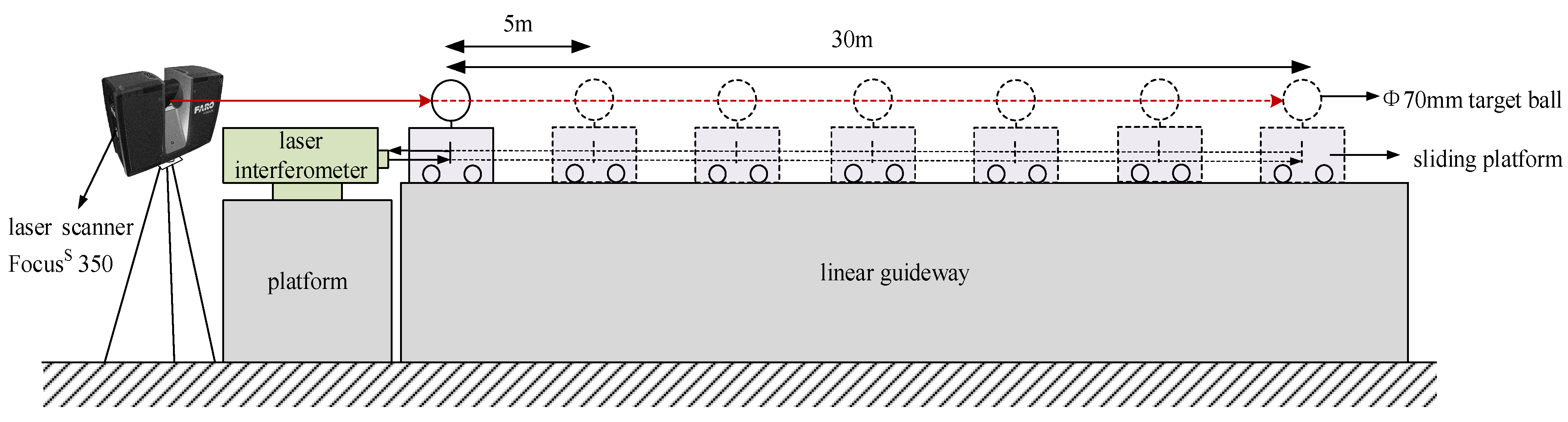
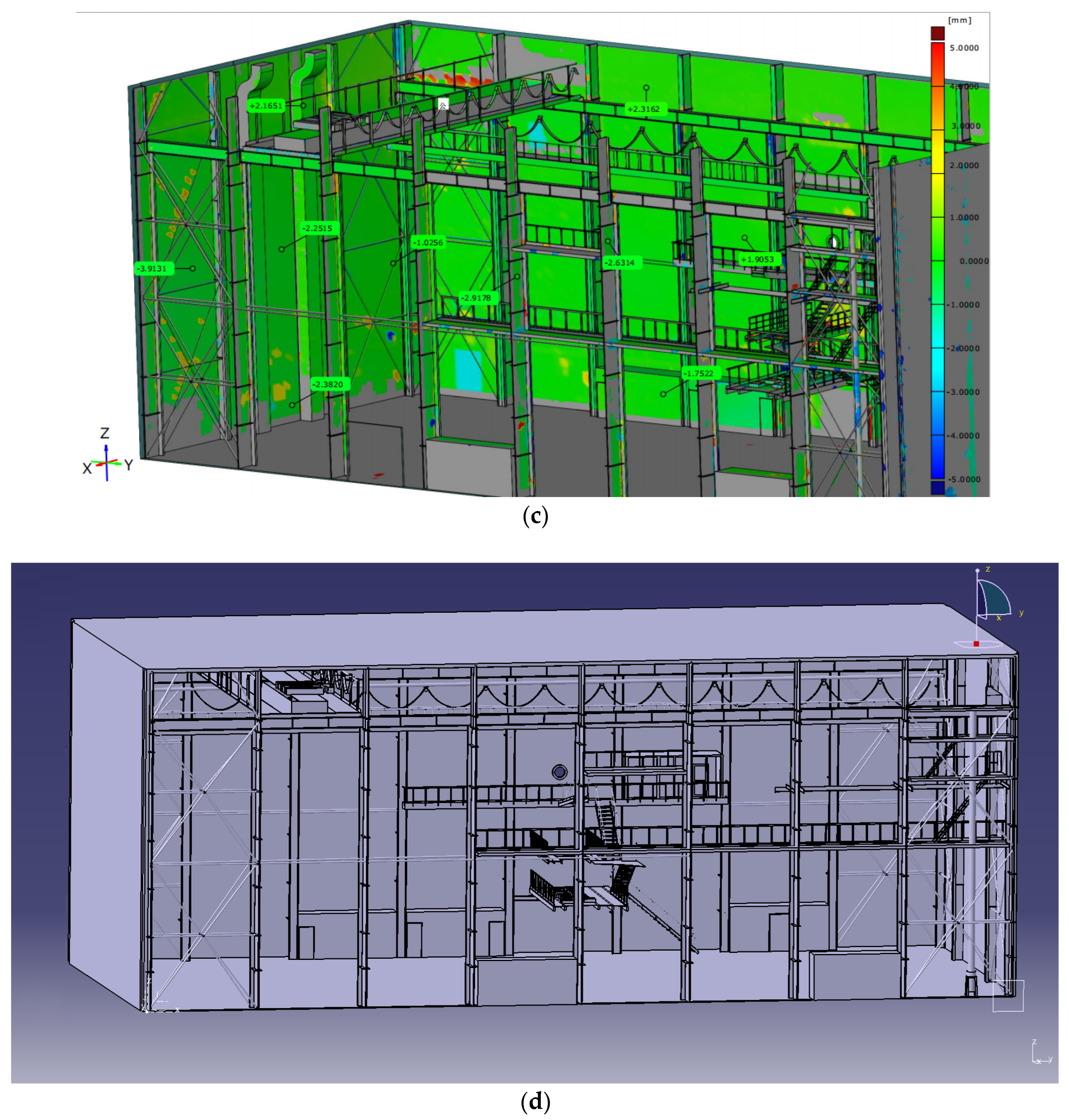
3.6. Accuracy Verification
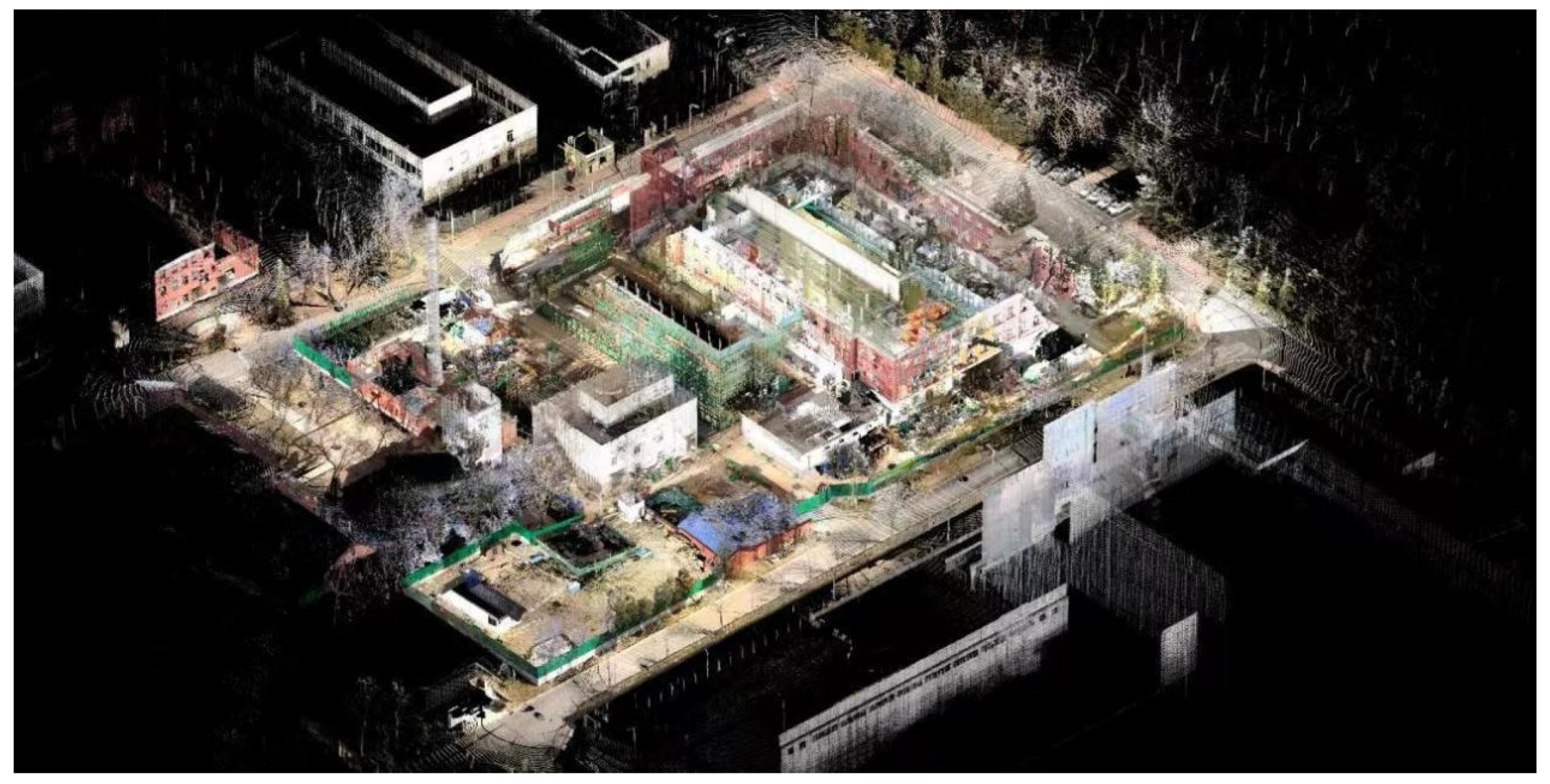
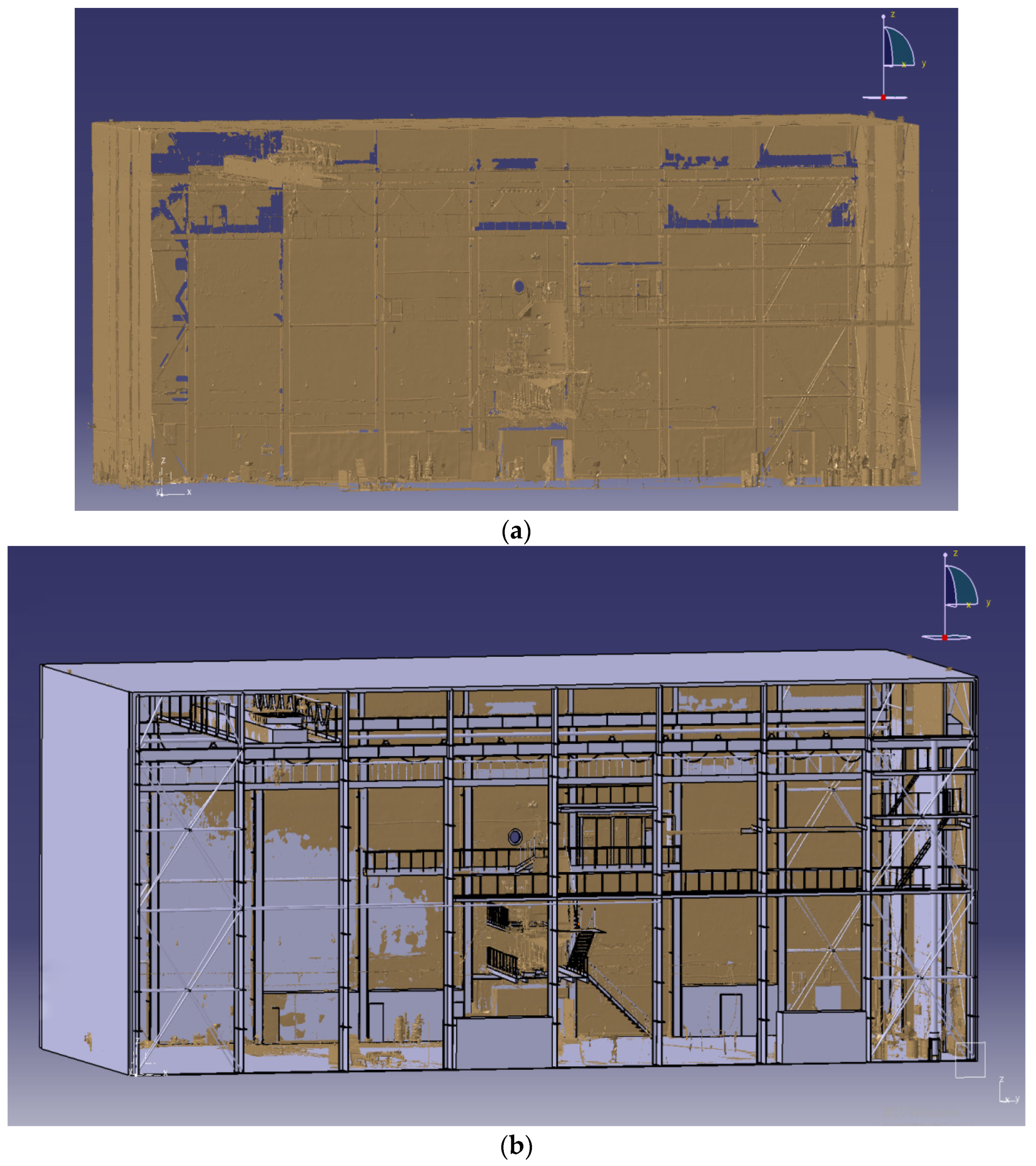
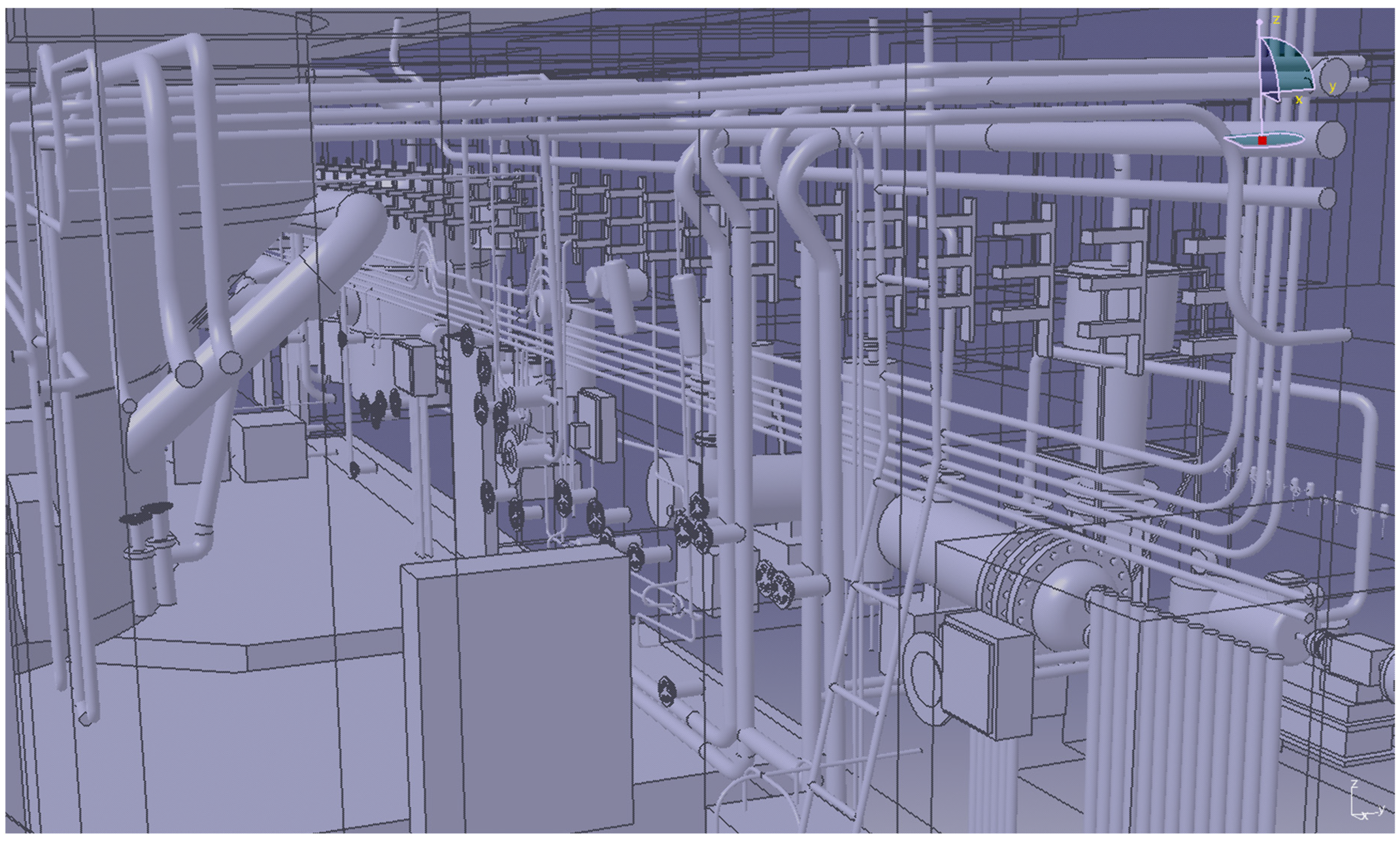
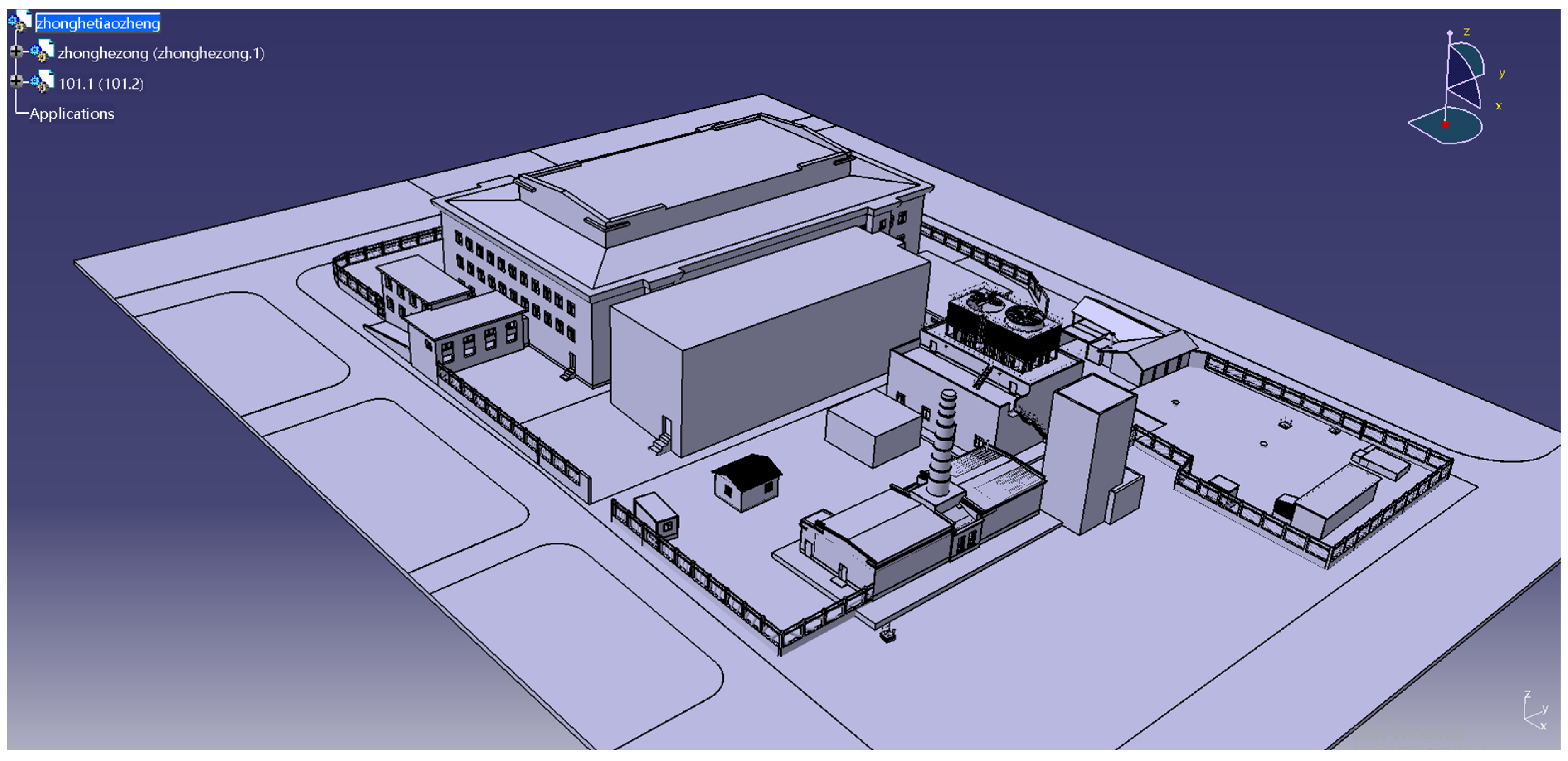
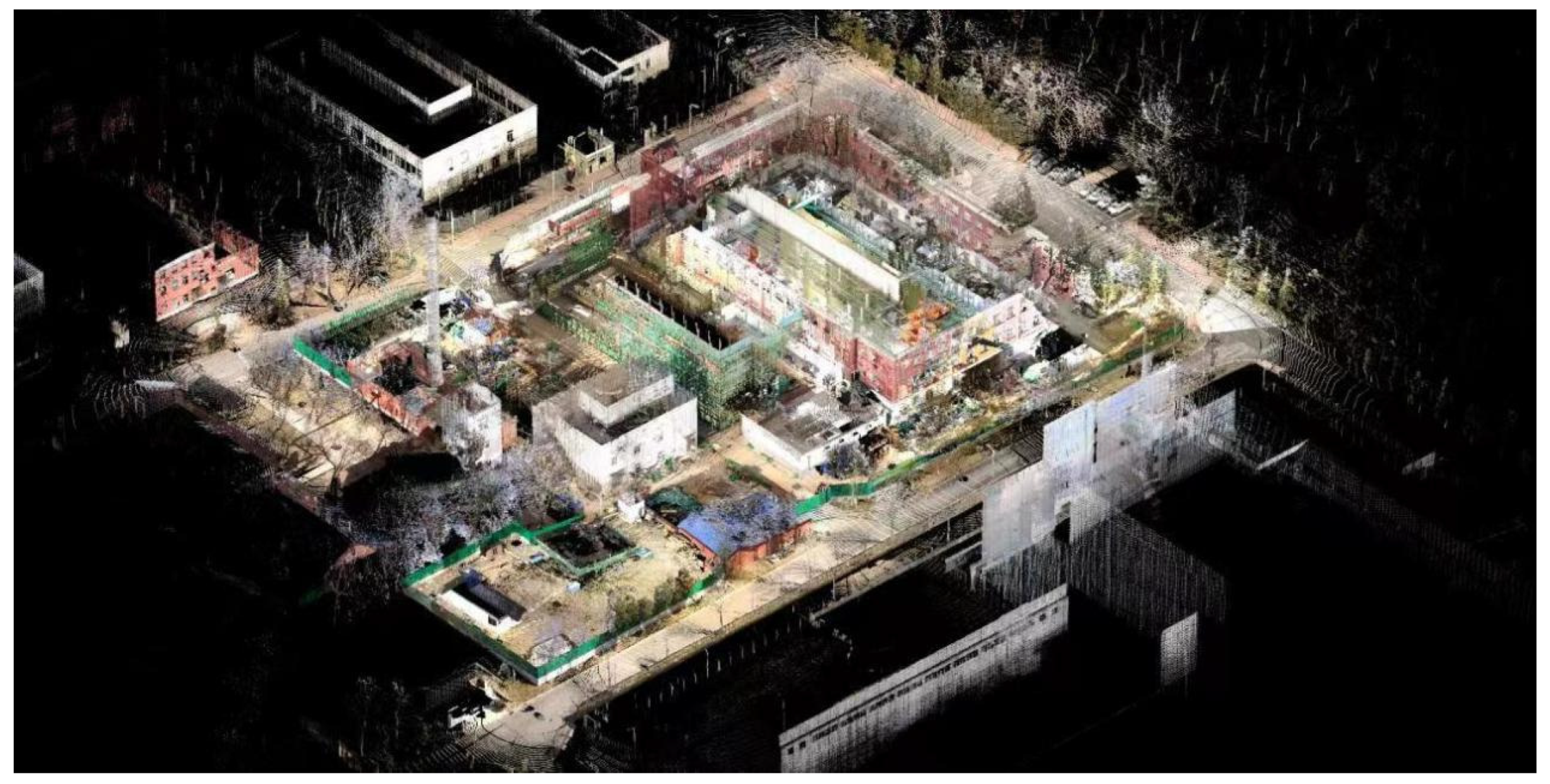
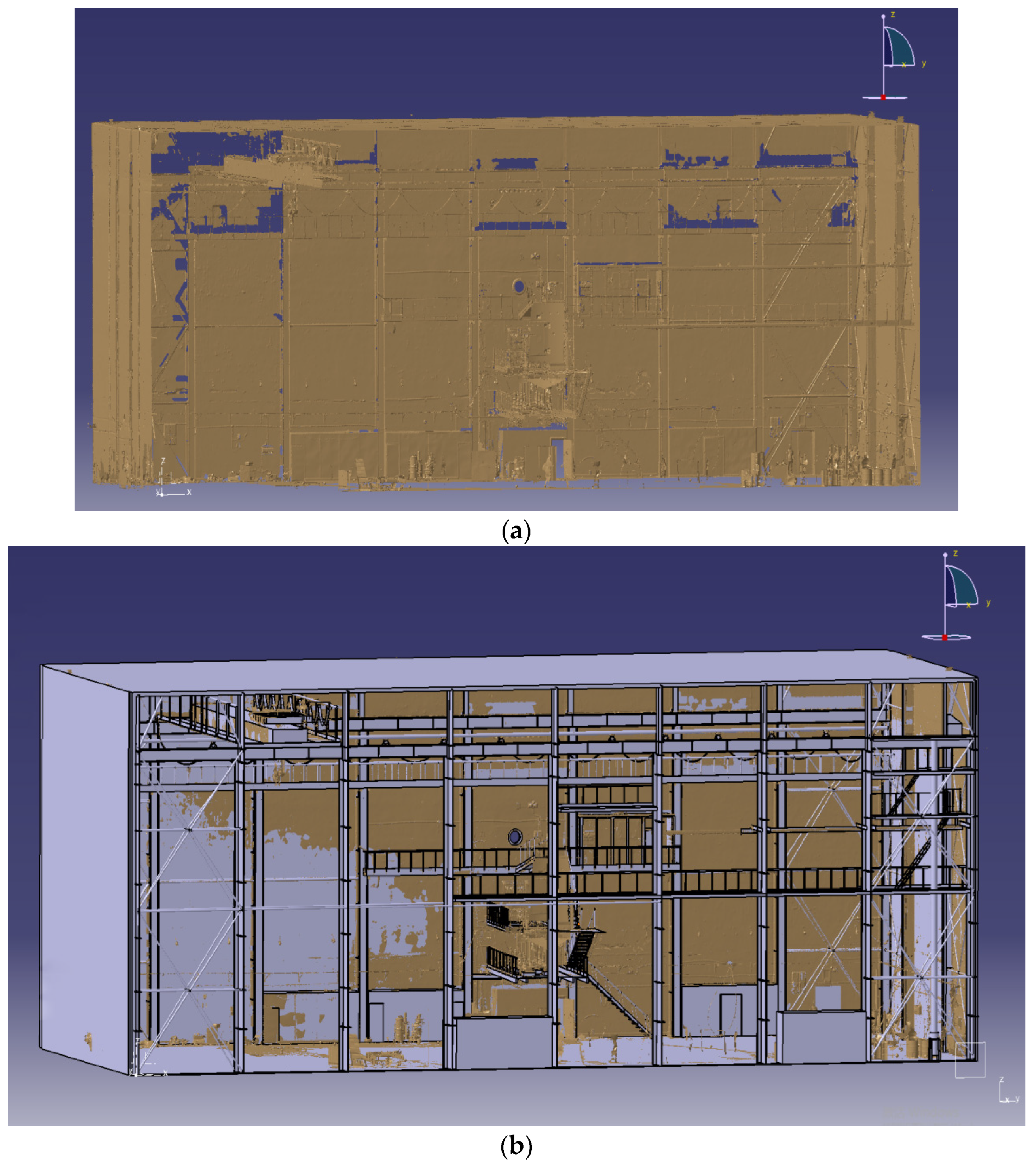
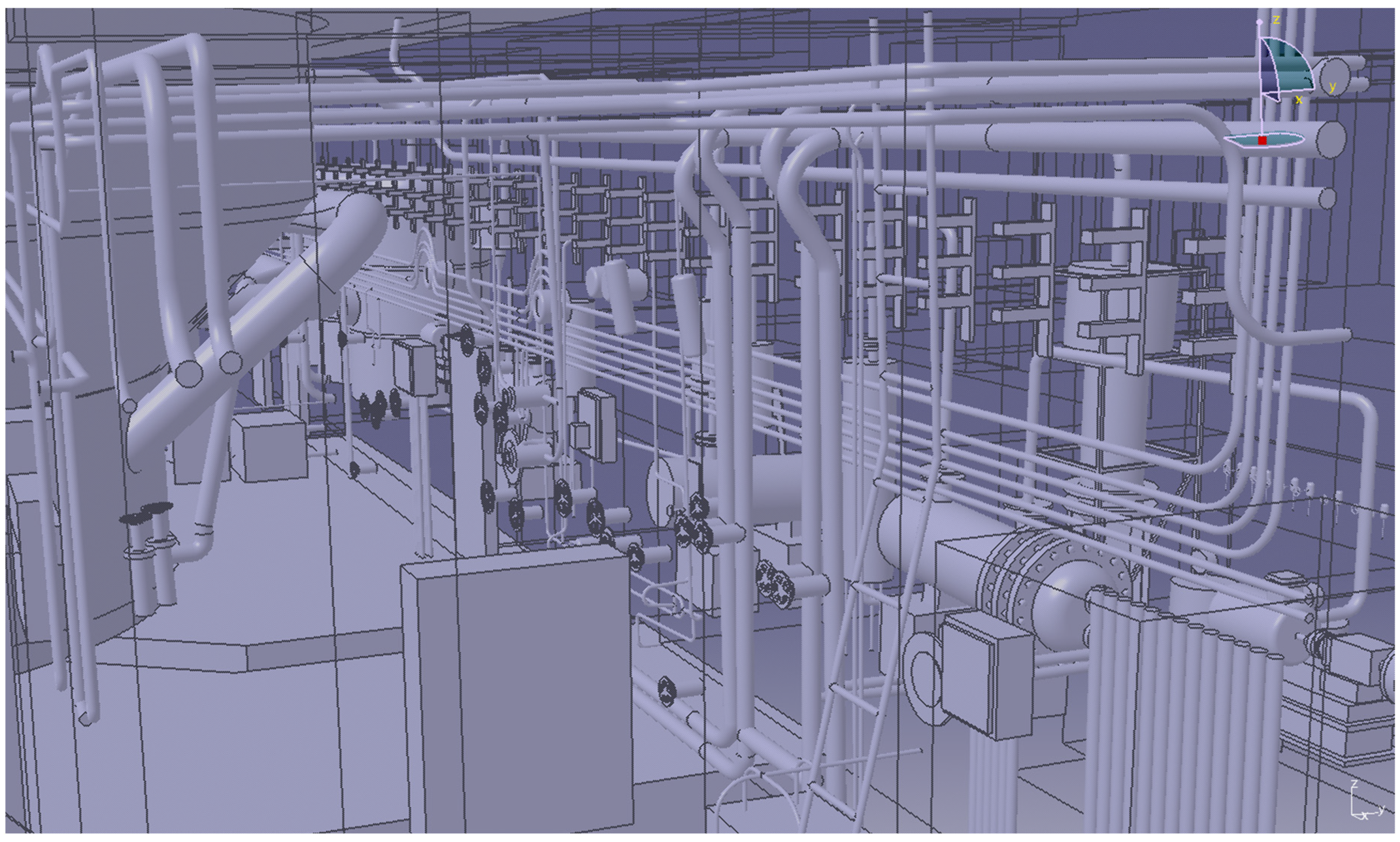
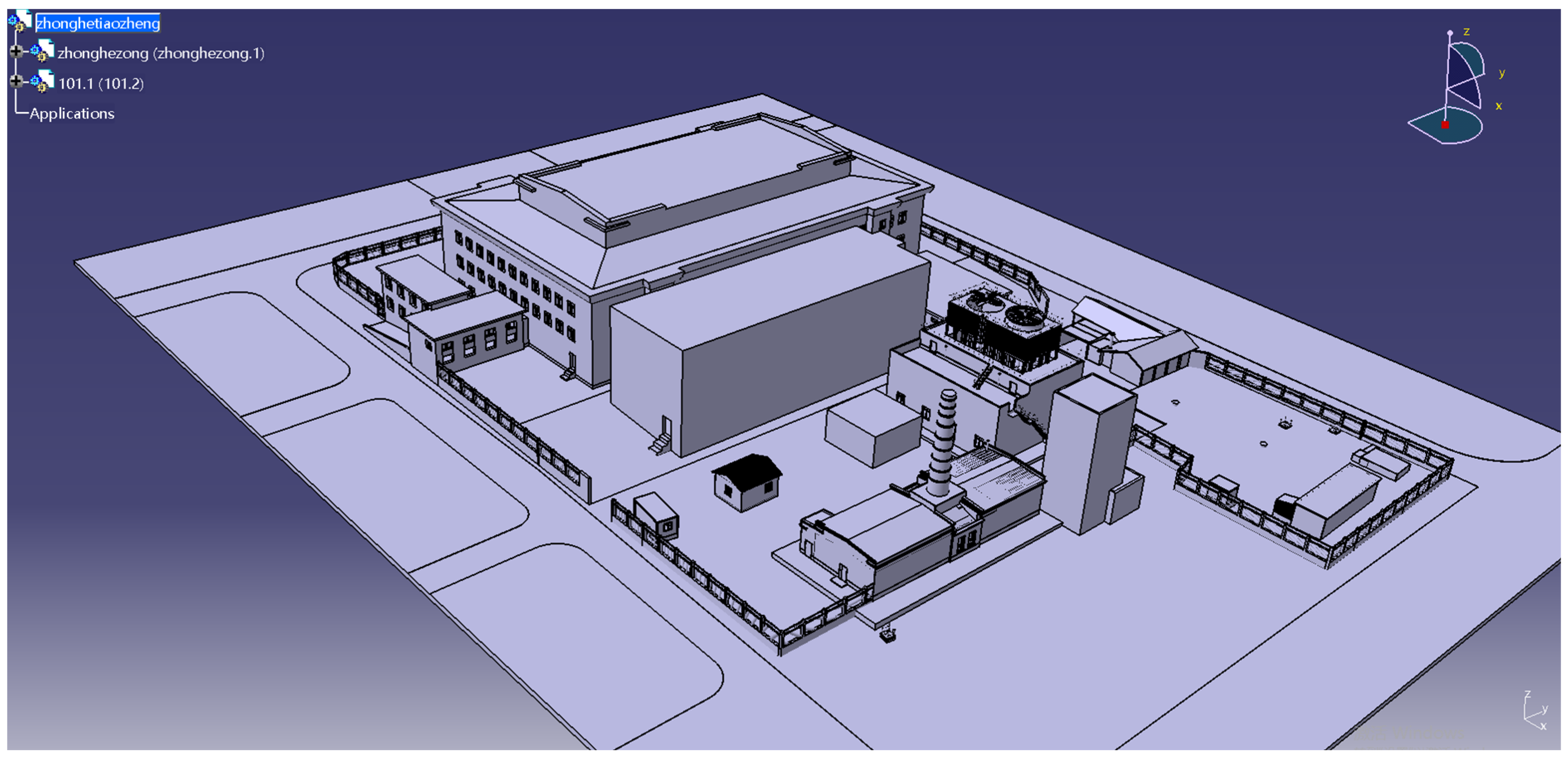
3.7. Model Reconstruction for the HWRR Plant
3.8. Scheduling
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schneider, M.; Froggartt, A. The World Nuclear Industry Status Report 2023; Mycle Schneider: Paris, France, 2023; Available online: https://www.worldnuclearreport.org/IMG/pdf/wnisr2023-v3-hr.pdf (accessed on 15 January 2024).
- International Atomic Energy Agency. Global Status of Decommissioning of Nuclear Installations; International Atomic Energy Agency: Vienna, Austria, 2023.
- Kim, I.; Hyun, D.; Joo, S.; Lee, J. A methodology for digital mockup update based on the 3D scanned spatial information for the automated dismantling of nuclear facilities. Ann. Nucl. Energy 2022, 139, 107238. [Google Scholar] [CrossRef]
- International Atomic Energy Agency. Management of Project Risks in Decommissioning; International Atomic Energy Agency: Vienna, Austria, 2019.
- Choi, B.S.; Hyun, D.; Kim, I.; Jonghwan, L.; Jeikwon, M. A new graphical dismantling process simulation technology for flexible planning of nuclear facility. Trans. Am. Nucl. Soc. 2017, 116, 35–37. [Google Scholar]
- Kim, H.-R.; Kim, S.-K.; Seo, B.-K.; Lee, K.-W.; Park, J.-H. The preliminary 3D dynamic simulation on the RSR dismantling process of the KRR-1&2. Ann. Nucl. Energy 2003, 30, 1487–1494. [Google Scholar] [CrossRef]
- Jeong, K.; Choi, B.; Moon, J.; Hyun, D.; Lee, J.; Kim, I.; Kim, G.; Seo, J. The digital mock-up system to simulate and evaluate the dismantling scenarios for decommissioning of a NPP. Ann. Nucl. Energy 2014, 69, 238–245. [Google Scholar] [CrossRef]
- Pot, J.; Thibault, G.; Levesque, P. Techniques for CAD reconstruction of ‘as-built’ environments and application to preparing for dismantling of plants. Nucl. Eng. Des. 1997, 178, 135–143. [Google Scholar] [CrossRef]
- Yan, W.; Aoyama, S.; Ishii, H.; Shimoda, H.; Sang, T.T.; Inge, S.L.; Lygren, T.A.; Terje, J.; Izumi, M. Development and evaluation of a temporary placement and conveyance operation simulation system using augmented reality. Nucl. Eng. Technol. 2012, 44, 507–522. [Google Scholar] [CrossRef]
- Wu, S.; Pan, T.; Cao, J.; He, D.; Xiao, Z. Radiological characterization survey during transition phase of safe shutdown of 101 HWRR. Nucl. Eng. Technol. 2012, 46, 716–720. [Google Scholar] [CrossRef]
- Ren, R.; Guo, Y.; Zhang, X.; Zhang, L.; Nie, P.; Li, R.; Li, H.; Zhao, Z. Design and application of a special underwater cutting device for the decommissioning of the first HWRR reactor in China. Nucl. Eng. Des. 2023, 415, 112678. [Google Scholar] [CrossRef]
- Farr, H. Advances and Innovations in Nuclear Decommissioning; Laraia, M., Ed.; Emerging Technologies: Naples, FL, USA, 2017; Volume 8, pp. 201–257. [Google Scholar]
- Zhao, J.L.; Wu, R.; Wang, L.; Wu, Y.Q. The application of 3D laser scanning technology in ancient architecture protection. Appl. Mech. Mater. 2013, 353–356, 3476–3479. [Google Scholar] [CrossRef]
- Elhakim, S.F.; Picard, M.; Godin, G. Detailed 3D reconstruction of heritage sites with integrated. IEEE Comput. Graph. Appl. 2004, 24, 21–29. [Google Scholar] [CrossRef]
- Arbace, L.; Sonnino, E.; Callieri, M.; Dellepiane, M.; Fabbri, M.; Idelson, A.I.; Scopigno, R. Innovative uses of 3D digital technologies to assist the restoration of a fragmented terracotta statue. J. Cult. Herit. 2013, 14, 332–345. [Google Scholar] [CrossRef]
- Strouth, A.; Burk, R.L.; Eberhardt, E. The afternoon creek rockslide near Newhalem Washington. Landslides 2006, 3, 175–179. [Google Scholar] [CrossRef]
- Abbas, M.A.; Luh, L.C.; Setan, H.; Majid, Z.; Chong, A.K.; Aspuri, A.; Idris, K.M.; Ariff, M.F.M. Terrestrial laser scanners pre-processing: Registration and georeferencing. J. Teknol. 2014, 71, 2180–3722. [Google Scholar] [CrossRef]
- Xu, F.J.; Chen, S.K. Application of 3D laser scan technology in the surveying and mapping of ancient buildings. In Proceedings of the 6th International Conference on Environmental Science and Civil Engineering, Nanchang, China, 4–5 January 2020. [Google Scholar]
- Zhang, L.; Song, L. Application of 3D laser scanning technology in surveying and mapping of building facade. Bull. Surv. Map. 2019, 9, 160–162. [Google Scholar] [CrossRef]
- Bobbitt, J.; Vrettos, N.; Howard, M. R&P Reactor Building In-Situ Decommissioning Visualization. U.S. 2010. Available online: https://www.osti.gov/servlets/purl/981860 (accessed on 15 June 2007).
- Liu, Z.; Liu, Y.; Zhu, H.; Cheng, S. Research on nuclear facilities decommissioning engineering support system framework. In Proceedings of the 2010 Asia Pacific Power and Energy Engineering Conference, Chengdu, China, 28–31 March 2010. [Google Scholar]
- Zhang, Y.L.; Zhao, W.; Wang, S. Study of laser 3D scanning model reconstruction for nuclear facilities decommissioning. In Proceedings of the 2020 International Conference on Nuclear Engineering, Virtual, 4–5 August 2020. [Google Scholar]
- Hyun, D.; Joo, S.; Kim, I.; Lee, J. 3D point cloud acquisition and correction in radioactive and underwater environments using industrial 3D scanners. Sensors 2022, 22, 9053. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.; Wang, R.; Luo, Y. 3D reality modeling of large complicated structural systems based on 2D engineering drawings. Struct. Eng. 2008, 24, 26–29. [Google Scholar] [CrossRef]
- Thanh, N.T.; Liu, X.; Wang, H.; Yu, M.; Zhou, W. 3D model reconstruction based on laser scanning technique. Laser Optoelectron. Prog. 2011, 48, 081201. [Google Scholar] [CrossRef]
- Zhang, H.F.; Cheng, X.J.; Shi, Y.T. Study on 3D modeling for history building and precision analyzing. Appl. Mech. Mater. 2011, 443–444, 471–476. [Google Scholar] [CrossRef]
- Zhang, K.; Zhao, L.; Deng, Q. Research on application of 3D laser scanning technology in the decommissioning nuclear facilities. Mech. Eng. 2016, 3, 66–68. [Google Scholar] [CrossRef]
- Chen, Y.; Wu, T.; Chen, Z.H. Error analysis and control based on 3D laser scanning measurement for large-scale bridge. Railw. Eng. 2022, 62, 96–100. [Google Scholar]
- Phan, N.D.M.; Quinsat, Y.; Lavernhe, S.; Lartigue, C. Scanner path planning with the control of overlap for part inspection with an industrial robot. Int. J. Adv. Manuf. Technol. 2018, 98, 629–643. [Google Scholar] [CrossRef]
- Li, L.W.; Li, H.; BAN, Y.; Gao, Y. Accuracy analysis of 3D laser scanning spherical targets at different distances and different scan densities. J. Kunming Metall. Coll. 2019, 35, 5. [Google Scholar]
- Kedzierski, M.; Walczykowski, P.; Orych, A.; Czarnecka, P. Accuracy assessment of modeling architectural structures and details using terrestrial laser scanning. In Proceedings of the 25th International CIPA Symposium 2015, Taipei, Taiwan, 31 August–4 September 2015. [Google Scholar]
- Cox, R.A.K. Real-World Comparisons between Target-Based and Targetless Point-Cloud Registration in FARO Scene, Trimble RealWorks and Autodesk Recap. Ph.D. Thesis, University of Southern Queensland, Toowoomba, QLD, Australia, 2015. [Google Scholar]
- Franaszek, M.; Cheok, G.S.; Witzgall, C. Fast automatic registration of range images from 3D imaging systems using sphere targets. Autom. Constr. 2009, 18, 265–274. [Google Scholar] [CrossRef]
- Shi, H. Automatic registration of laser point cloud using precisely located sphere targets. J. Appl. Remote Sens. 2014, 8, 5230–5237. [Google Scholar] [CrossRef]
- Liu, B.; Shangguan, N.; Jiang, K.; Lin, J. Triangular mesh model reconstruction from scan point clouds based on template. Tsinghua Sci. Technol. 2009, 14, 56–61. [Google Scholar] [CrossRef]
- Kersten, T.P.; Lindstaedt, M. Geometric accuracy investigations of terrestrial laser scanner systems in the laboratory and in the field. Appl. Geomat. 2022, 14, 421–434. [Google Scholar] [CrossRef]
- Deng, X.; Qian, Z.; Zhou, Z. Terrestrial laser scanner ranging calibration equipment and evaluation of measurement uncertainty. Acta Meteorol. Sin. 2010, 31, 157–160. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Index | Laser-Scanning 3D Model Reconstruction Technology | 3D Software Modeling Technology |
|---|---|---|---|
| 1 | Costs | The economic cost of the 3D laser-scanning equipment is relatively high, but at the same time it saves time. | The economic cost is relatively low, while the time cost of decommissioning is increased. |
| 2 | Skilled manpower | The variety and level of skilled manpower required is high. | The skilled manpower required are relatively homogeneous. |
| 3 | Model accuracy | High precision with multiple presentation of results. | General, not applicable to the modeling of complex objects. |
| 4 | Data acquisition | 3D coordinates and reflectivity of modeled entities. | Drawings containing dimensional data of modeled entities. |
| 5 | Workloads | The data acquisition and modeling workload is small, but the workload required for processing the point cloud data is large. | The data acquisition and modeling workload is large. |
| No. | Equipment | Brand | Specifications | Quantity |
|---|---|---|---|---|
| 1 | 3D laser scanner | FARO FocusS 350 (FARO, Lake Mary, FL, USA) | Maximum measure speed: 976,000 pts/s; Angle accuracy: 0.00527°; Distance accuracy: ±1 mm; | 1 |
| 2 | Total station | TCRP 1201 (Leica, Wetzlar, Germany) | Angle accuracy: 0.00027°; Distance accuracy: 1 mm + 1.5 ppm; Display resolution: 0.1 mm | 1 |
| 3 | Camera | A7R2 (Sony, Tokyo, Japan) | Effective pixels: 42.4 million; Maximum shutter speed: 1/8000 s | 1 |
| 4 | Target spheres | FARO (Lake Mary, FL, USA) | 14.5 cm in diameter | 10 |
| 5 | PC workstation | T-7920 (Dell, Austin, TX, USA) | Intel Xeon Gold 6248R CPU @ 3.00 GHz; 128 G RAM | 4 |
| No. | Region | Building Area/m2 | Number of Floors |
|---|---|---|---|
| 1 | Reactor main building | 8690 | 6 |
| 2 | Ventilation center | 300 | 1 |
| 3 | Low-level radioactive wastewater storage tank area | 2083 | 1 |
| 4 | Secondary water pump room | 489 | 1 |
| Total | 11,562 | - |
| No. | Measured Value/mm | Reference Value/mm | Error/mm |
|---|---|---|---|
| 1 | 4999.8 | 4999.9 | −0.1 |
| 2 | 9999.7 | 9999.8 | −0.1 |
| 3 | 15,000.5 | 15,000.2 | 0.3 |
| 4 | 20,000.0 | 19,999.9 | 0.1 |
| 5 | 25,000.5 | 25,000.3 | 0.2 |
| 6 | 30,000.5 | 30,000.2 | 0.3 |
| No. | Tasks | Duration | Working Time |
|---|---|---|---|
| 1 | Preparation Work | 2 working days | 23/3–24/3/2022 |
| 2 | Control survey | 5 working days | 25/3–31/3/2022 |
| 3 | Three-dimensional laser scan | 21 working days | 1/4–29/4/2022 |
| 4 | Point cloud data processing | 9 working days | 20/4–2/5/2022 |
| 5 | Model Reconstruction | 40 working days | 28/4–22/6/2022 |
| 6 | Data accuracy check | 15 working days | 8/6–28/6/2022 |
| 7 | Result arrangement | 3 working days | 28/6–30/6/2022 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Zhang, Y.; Li, R.; Zhang, L.; Zhang, X.; Li, H.; Nie, P.; Zhang, S. The Application of Laser-Scanning 3D Model Reconstruction Technology for Visualizing a Decommissioning Model of the Heavy Water Research Reactor. Appl. Sci. 2024, 14, 3135. https://doi.org/10.3390/app14083135
Li W, Zhang Y, Li R, Zhang L, Zhang X, Li H, Nie P, Zhang S. The Application of Laser-Scanning 3D Model Reconstruction Technology for Visualizing a Decommissioning Model of the Heavy Water Research Reactor. Applied Sciences. 2024; 14(8):3135. https://doi.org/10.3390/app14083135
Chicago/Turabian StyleLi, Wensi, Yu Zhang, Ruizhi Li, Lijun Zhang, Xingwang Zhang, Hongyin Li, Peng Nie, and Shengdong Zhang. 2024. "The Application of Laser-Scanning 3D Model Reconstruction Technology for Visualizing a Decommissioning Model of the Heavy Water Research Reactor" Applied Sciences 14, no. 8: 3135. https://doi.org/10.3390/app14083135
APA StyleLi, W., Zhang, Y., Li, R., Zhang, L., Zhang, X., Li, H., Nie, P., & Zhang, S. (2024). The Application of Laser-Scanning 3D Model Reconstruction Technology for Visualizing a Decommissioning Model of the Heavy Water Research Reactor. Applied Sciences, 14(8), 3135. https://doi.org/10.3390/app14083135