1. Introduction
The need for safety-critical active suspension control is on the rise within the automotive sector [
1,
2,
3]. These control systems must factor in the parameter uncertainty and the nonlinear characteristics of suspension elements [
4,
5]. An efficient way to unravel this issue is employing data-driven optimization-based control such as safety critical controllers [
6,
7,
8]. The safety requirements of a well-designed suspension system should provide a comfortable ride by isolating the passenger from the road roughness. It should also ensure vehicle handling and road holding by maintaining proper tire contact with the road and that the suspension stroke falls within acceptable limits. One of the primary objectives of safety-critical active suspension control is to limit the suspension stroke from reaching its physical limits. Restricting suspension stroke in suspension systems is critical for vehicle safety, stability, ride comfort, and overall performance. It contributes to the reliability of suspension components, maintains consistent handling, and protects the vehicle and its occupants during normal and difficult driving styles.
Active suspension system modeling often relies on linear car suspension models to simplify the analysis, albeit with significantly deteriorating model accuracy. For active suspension systems, many researchers have developed a variety of linear control techniques during the last few decades. Elbeheiry and Karnopp, Bai and Wang, Yu et al., Ahn et al., and Ergin and Yatak [
9,
10,
11,
12,
13] employed the optimal control theory including Linear Quadratic Gaussian (LQG) and Linear Quadratic Regulator (LQR) to active suspension systems. On the other hand, Gao et al., Sun et al., Van et al. and Kaleemullah et al. [
14,
15,
16,
17] applied robust control theory for active suspension systems due to their capability to address model and parameter uncertainties. However, when vehicles experience substantial suspension stroke, the linear approximation degrades significantly. This motivates the employment of nonlinear car models for active suspension design. More precisely, Mcgee et al. [
18] studied various types of nonlinearities in suspension systems and demonstrated that cubic nonlinearity in the suspension spring is essential for accurate suspension system modeling. Nonlinear control strategies are also applied in active suspension systems featuring nonlinearity, including Linear Parameter Varying Control (LPV) [
19,
20,
21], backstepping control [
22,
23,
24], Sliding Mode Control [
25,
26,
27], and feedback linearization [
28,
29,
30].
Nevertheless, none of the aforementioned techniques considers safety-critical control techniques to ensure safety constraints, such as restricting suspension stroke to a specific range, though they consider minimizing the effect of the road disturbance on the suspension stroke. Conventional control strategies lack explicit mechanisms to online monitor safety constraints and enforce them where necessary, such as limiting suspension stroke within a specific range to prevent vehicle instability or component failure. Safety-critical control approaches emerge as a significant extension to the current control strategies to address this issue. Safety-critical controllers prioritize safety by incorporating optimization-based strategies customized to enforce critical safety constraints, ensuring the system operates within specified limits even under challenging conditions. However, safety-critical controllers are optimization-based and generally require large online computations. With increases in hardware-computing capacity, many researchers are using optimization-based approaches for active suspension systems. A well-received optimization-based control approach in the realm of active suspensions is Model Predictive Control (MPC) [
7,
8,
31]. MPC aims at each time step to minimize a cost function, which defines the desired system performance while adhering to constraints on inputs, outputs, and states. Nevertheless, the choice of prediction horizon can significantly affect the control performance. Hence, this work will consider an alternative optimization-based approach widely used in autonomous vehicles: Control Lyapunov Function–Control Barrier Function–Quadratic Programming (CLF-CBF-QP). Lyapunov functions are broadly utilized to demonstrate the equilibrium points’ stability in terms of Lyapunov stability, asymptotic stability, or exponential stability [
6]. In light of the milestone work of Sontag [
32] and Artstein [
33], control Lyapunov functions (CLFs) have emerged as paramount to the control design of nonlinear systems. Barrier functions are prevalent in the control literature owing to their connection with Lyapunov-type functions and capacity to ensure safety [
34,
35]. Similar to CLFs, barrier functions were also extended to Control Barrier Functions (CBFs), first presented by Wieland et al. [
36]. CLF-CBF-QP provides Lyapunov-type conditions for the considered problem to ensure safety. It integrates barrier functions with the control Lyapunov function and harnesses the fast real-time capabilities of quadratic programs [
37]. CLF-CBF-QP is an excellent candidate for active suspension control, as it incorporates the Lyapunov function to enhance performance with the barrier function dedicated to guaranteeing safety constraints, more precisely, suspension stroke limits. Limiting suspension travel enables the suspension to absorb severe shocks due to road disturbance without bottoming out or becoming excessively stiff, which is critical for human comfort, vehicle control, and safety.
This work considers a quarter-car model featuring a suspension spring with cubic nonlinearity. It formulates the safety-critical CLF-CBF-QP controller for the nonlinear quarter-car model. Our controller design involves two crucial formulations: a Lyapunov function to ensure system stability and performance enhancement, and a barrier function to enforce limits on suspension stroke. Restricting suspension stroke in suspension systems enhances the durability of suspension components, provides steady handling, and provides vital protection for the vehicle and its occupants during ordinary driving and challenging maneuvers.
2. Nonlinear Quarter-Vehicle Model
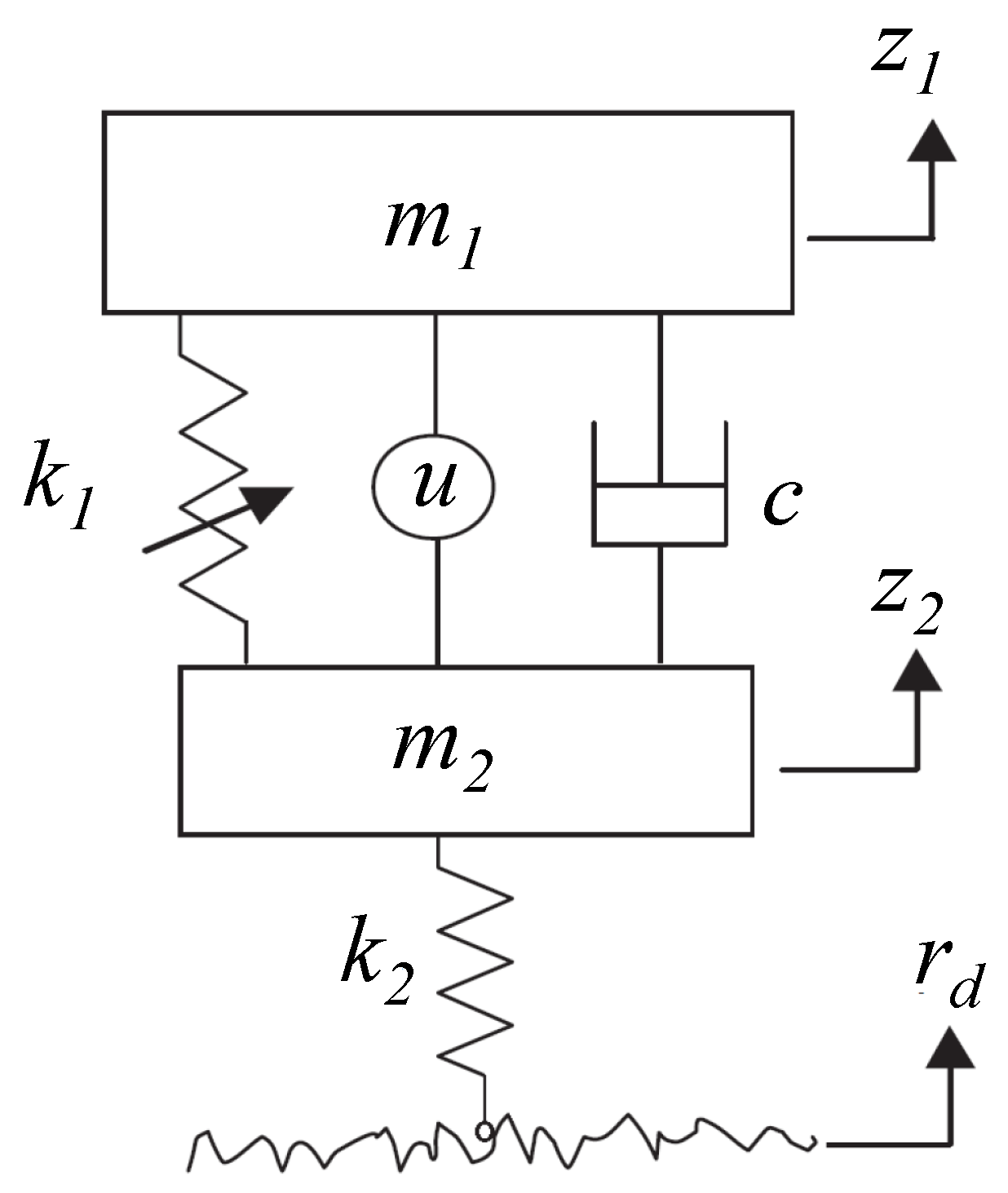
The schematic in
Figure 1 illustrates the quarter-vehicle dynamics, featuring a nonlinear suspension spring, where
and
represent the positions of the unsprung and sprung masses, respectively. The selection of the quarter-car model within this study is motivated by the clear focus on analyzing heave motion of the sprung mass. This model comprises four main components: a quarter-car body, a wheel, a suspension spring, and a damper connecting the body to the wheel. McGee et al. [
18] conducted a comprehensive investigation into different types of nonlinearities present in suspension systems. Through their experiments, they illustrated that the cubic nonlinearity in the suspension spring is an essential characteristic for the accurate modeling of suspension systems. Following [
18,
28], the suspension spring used in this work has cubic nonlinear characteristics, where the restoring force is composed of two distinctive components: a linear component denoted as
and a nonlinear one described by
.
Here,
and
represent the unsprung and sprung masses, respectively, while
and
correspond to the linear and nonlinear spring stiffnesses. Additionally,
c stands for the damping coefficient of the viscous damper installed between the sprung and unsprung masses. In the context of this study, a linear spring emulates the tire dynamics with a stiffness coefficient denoted as
. The term
signifies the dynamic force input applied to the suspension system by the actuator, serving the purpose of compensating for the road disturbance (
). The nonlinear quarter car model in Equations (
1) and (
2) can be written as follows:
where
x is the state vector, which is defined as
. The terms
and
are the linear and nonlinear dynamics, respectively. The linear state space matrices are defined as follows:
whereas the nonlinear part is defined as:
The formulation in Equation (
3) offers notable benefits for our subsequent analysis. Specifically, it lends itself readily to linearization by simply setting
. Additionally, setting
transforms the original system into an undisturbed system. These dynamic systems, as described, will be instrumental in the forthcoming controller design section.
3. Methods
This section presents the Control Lyapunov Function (CLF) integrated with a Control Barrier Function (CBF) in the context of a real-time Quadratic Program (QP). The primary objective is to guarantee that the closed-loop suspension system can achieve the desired final state while maintaining mechanical safety by preventing the suspension stroke from breaching its specified limits, that may lead to mechanical failure. The methods section is organized as follows:
Section 3.1 introduces the nonlinear control affine systems. Then,
Section 3.2 describes the Control Lyapunov function, its properties, and the exponential stability conditions. Additionally,
Section 3.3 presents the control Barrier function, its properties, and the exponential stability formulation for barrier functions. Finally,
Section 3.4 introduces the design of the CLF-CBF-QP safety-critical controller for the active suspension system.
3.1. Control Affine System
The nonlinear system under investigation is a control affine system that is represented by the following equation:
where
is the state vector,
is the control input,
is the drift term and
is the actuation effect. Comparing Equation (
4) to the undisturbed version of the nonlinear quarter car model in Equation (
3) follows that:
and
.
3.2. Control Lyapunov Function
CLF is based on the Lyapunov function , which is a continuously differentiable function. The CLF problem generally searches the minimum control law u that stabilizes the closed-loop system via making negative definite while maintaining the positive definiteness of . This work aims at the exponential stability of control Lyapunov functions; the same concept will be used later on in control barrier functions.
Definition 1 ([
38])
. Consider a continuously differentiable function that is positive definite. If there exists a positive constant η such that the following condition holds:then, qualifies as an exponentially stabilizing Control Lyapunov Function (CLF), ensuring that any state can be exponentially stabilized towards the system’s equilibrium. The exponential stability CLF constraint in Equation (
5) are often relaxed with a slack variable
to enforce the feasibility of the optimization problem, which can be rewritten as:
Noting that the derivative of Lyapunov function is:
where
is defined as a Lie derivative operator [
39].
3.3. Control Barrier Function
Control barrier functions are generally used for guaranteeing safety. CBF formulates safety by ensuring the invariance of a particular set, meaning staying within this safe set. Specifically, we examine a set denoted as , which represents a superlevel set of a continuously differentiable function .
Definition 2 ([
38])
. Consider a continuously differentiable function with the following properties:- 1.
The zero-superlevel set of is denoted as , i.e., .
- 2.
is nonzero for all x on the boundary of , which is denoted as .
If there exists a coefficient μ, i.e., , that satisfy the following constraint:for all , then, the function is termed a Control Barrier Function, and any Lipschitz continuous control law u that satisfies the above constraint will render the set safe, meaning that it is control invariant. Noting that the derivative of the Barrier function
function is:
Both CLFs and CBFs are continuously differentiable functions. However, they serve distinct purposes. CLFs are mainly used to ensure system stability. On the other hand, CBFs are designed to enforce safety constraints to ensure that the system remains within safe regions of the state space.
3.4. Clf-Cbf-Qp Design of the Suspension System
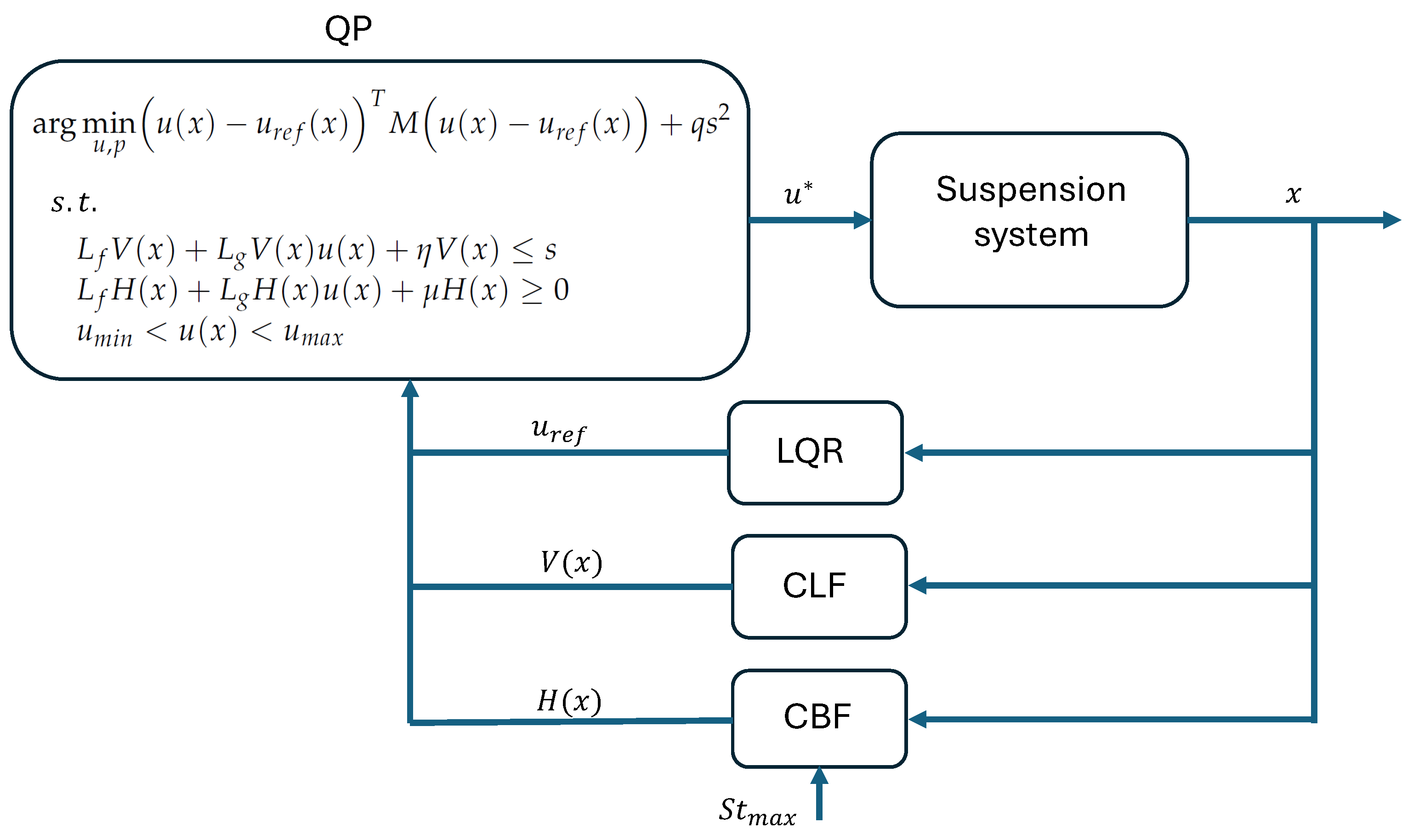
The CLF-CBF-QP-based formulation of safety-critical controllers proposes a strategy to guarantee safety and stability as shown in
Figure 2. Consider a control law (u) applied to the system (
4) aiming at ensuring safety.
Taking into account that the stability and safety conditions are affine in u, as given in Equations (
6) and (
8), respectively, the CLF-CBF-QP can minimally modify the control law to satisfy stability and safety constraints. QP is a convex optimization problem computationally fast enough for real-time applications [
40]. The CLF-CBF-QP [
38] controller is constructed as follows:
subject to:
where
M is a positive definite matrix, and
q is a positive scalar. Both
M and
q are weights that penalize the control effort and the slack variable for the QP problem, respectively. The reference control law (
) is designed generally in the CLF-CBF-QP controller design framework using steady-state analysis, this does not work for these types of second-order problems. For the suspension systems, it is desirable to drive all states to equilibrium, including the sprung mass displacement, which is not directly proportional to the control input. One way to remedy this problem is to use backstopping techniques to formulate the proper Lyapunov function. Unfortunately, this may complicate the Lyapunov function and its derivatives. This work proposes another technique to solve this issue, the reference controller is designed using a Linear quadratic regulator (LQR) based on the linearized version of system Equation (
3), simply by assuming
. The LQR problem is computed offline and searches for a state-feedback controller
that minimizes the following objective function:
where
Q is positive semi-definite real symmetric matrix.
R is a positive-definite real symmetric matrix. The matrices
Q and
R are weighting matrices that penalize the system states and the control input, respectively. Manipulating the relative weights assigned to
Q and
R allows for emphasis on either state tracking or control effort minimization. Note that this controller does not account for the nonlinearity in the suspension system. Therefore, the CLF is designed to improve the reference controller performance by taking into account nonlinearity, unmodeled dynamics, and disturbances via the online implementation. The Lyapunov Function
used in this work is defined as:
in order to find the derivative of Lyapunov function (
) in Equation (
7), the following is computed:
Next, the safety objective of this controller is to maintain the suspension stroke within specified limits. This safety objective requires enforcing a safety-critical constraint of the form
, where
is the suspension stroke and
is the maximum allowable stroke. Inspired by lane-keeping controllers for autonomous vehicles [
35,
38,
41], this work formulates the safety constraint of the suspension stroke through the following barrier function:
where
is a positive constant that can effectively relax the CBF constraint. It is worth noting that this type of barrier function was proven to be a valid CBF by [
35,
41]. To determine the derivative of barrier function (
) as shown in Equation (
9), the following is computed:
where
is the Dirac delta function.
4. Results
In this section, we present the results of our simulation investigations into the performance of the proposed CLF-CBF-QP controller with the suspension system. We begin by discussing the introduced road disturbances to the suspension system. Subsequently, we present the detailed design parameters of the LQR and CLF-CBF-QP controller. Furthermore, we present comprehensive analyses to validate the robustness and significance of our closed-loop results in response to challenging road profiles.
This section delves into two typical simulations of the nonlinear quarter-car model’s closed-loop response when employing CLF-CBF-QP and LQR controllers. It is worth mentioning that all simulations were carried out in the MATLAB environment on an Intel six-core PC with a 2.2 GHz CPU and 16 GB of RAM. The purpose of these simulations is to assess the CLF-CBF-QP controller performance in guaranteeing safety and stability requirements across various road profiles. Two distinct road profiles are under consideration that offer diverse complexities. The first road profile features a smooth sinusoidal bump of
m peak height, while the second involves a ramped pothole of
m depth. The vehicle model’s parameters are detailed in
Table 1, and it is worth noting that these parameters closely resemble those used by [
42].
First, the reference controller is designed as an LQR controller as discussed in
Section 3.4 using the following weights:
Then, the CLF-CBF-QP controller is designed by solving quadratic programs formulated in Equation (
10), subject to Equation (
11). The CLF-CBF-QP controller’s parameters are listed in
Table 2. This controller computes the optimum control law (
u) every 0.01 s.
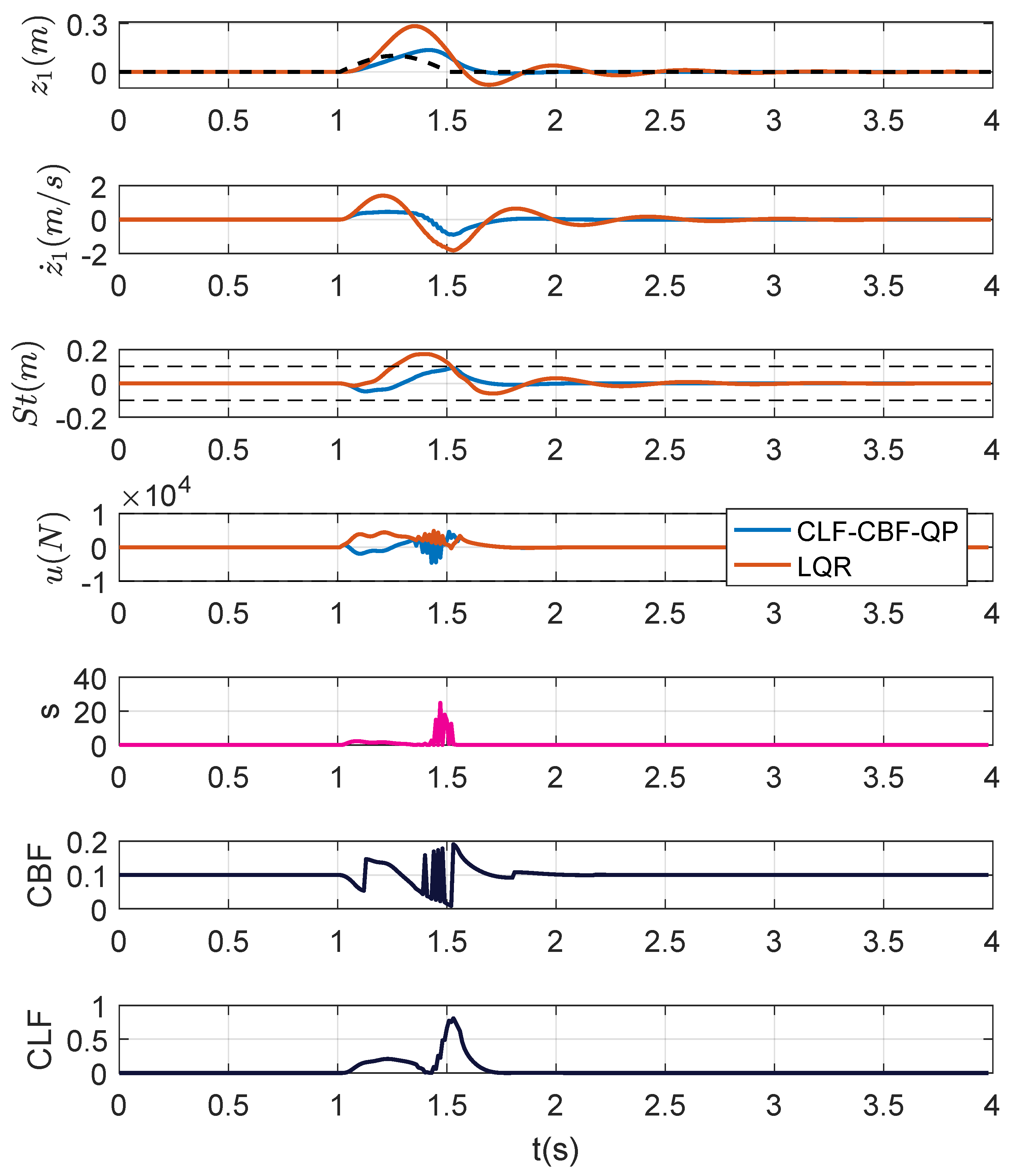
Figure 3 illustrates the outcomes of the closed-loop simulations involving the quarter-car model featuring cubic nonlinearity when utilizing CLF-CBF-QP controller. In this scenario, the vehicle encounters a road disturbance of
m high smooth bump. Further, the figure provides a comparative analysis of the closed-loop outcomes achieved with the suggested controller and those obtained with the LQR controller. The figure undoubtedly demonstrates substantial enhancements in various performance aspects, including sprung mass displacement, sprung mass velocity, and suspension stroke, when compared to the responses obtained from active suspension system with LQR controller (
). For instance, the settling time for both sprung mass displacement and velocity is around 1.7 s for the closed-loop response with the LQR controller, while the CLF-CBF-QP controller successfully reduced the settling time to less than 1 s. Moreover, the maximum peak of the sprung mass displacement (
) is approximately three times the bump height for the closed-loop response with the LQR controller, while the CLF-CBF-QP controller successfully managed to cope with the road disturbance with a maximum sprung mass displacement peak of almost the same of bump height. Note that the CLF objective is to keep the sprung mass velocity (
) as close to zero as possible. Interestingly, even though the CLF did not include the sprung mass displacement in the Lyapunov function, the CLF managed to improve it indirectly by observing only the sprung mass velocity. This is also related to the choice of the reference controller as discussed in
Section 3.4.
At the onset of the bump disturbance at s, it led to an increase in , causing it to deviate from the desired zero velocity. Consequently, the CLF constraint demonstrated a gradual increment, resulting in an elevation of the control action (compression). This adjustment led to a subsequent reduction in , bringing it closer to zero at s, in alignment with the CLF constraint and the consequent control effort. In this period ( s), there was a slight increase in the suspension stroke ( m) that caused the CBF to exhibit a slight spike, which was enough to drive toward zero, evidencing why the slack variable did not increase much to relax the CLF. On the other hand, after s, the suspension stroke approached the limit ( m), and the CBF exhibited multiple larger spikes that caused the slack variable to increase, relax the CFL, and enforce the suspension stroke to decrease. It is worth mentioning that the LQR controller failed to limit the suspension stroke within the specified limits during the period ( s). Enhancing the slack variable and relaxing the constraints of the CLF demonstrate the capacity of CLF-CBF-QP to prioritize safety over performance as required. It is worth noting that the chattering behavior of the CBF constraint is due to the sign function in the barrier function formulation.
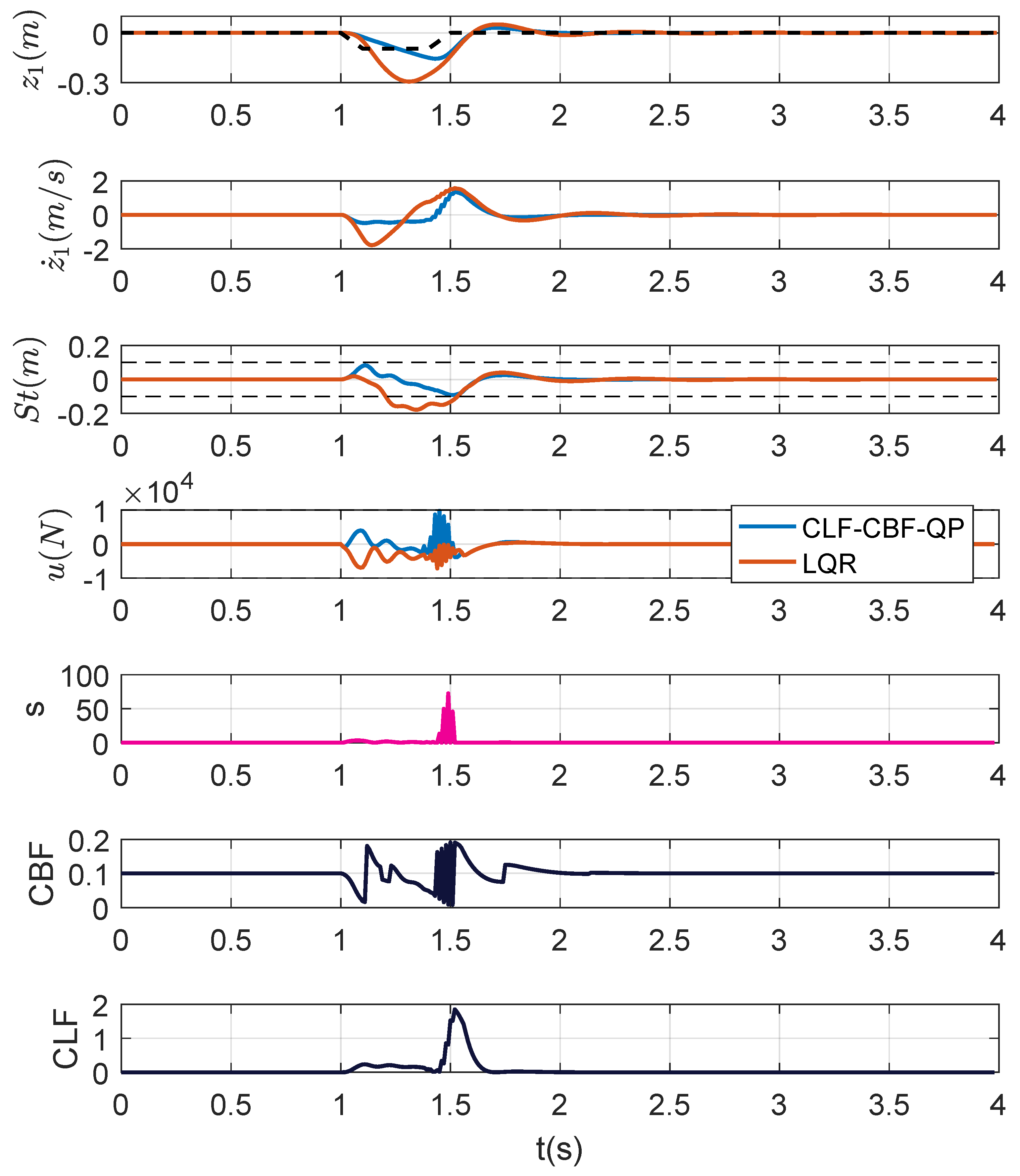
Figure 4 presents the results of the closed-loop simulations of the nonlinear quarter-car model with the CLF-CBF-QP and LQR controller. At
s, the vehicle encounters a ramped pothole with a depth of
m on the road. The figure showcases significant improvements in various performance metrics, including sprung mass displacement, sprung mass velocity, and suspension stroke compared to the responses obtained with the LQR controller. In contrast, the CLF-CBF-QP controller significantly reduces the settling time for both sprung mass displacement and velocity and the maximum peak of the sprung mass displacement. As the pothole disturbance commenced, it induced a downward trend in
, causing it to deviate from the desired zero velocity. Consequently, the CLF constraint experienced a gradual increase, leading to an upward adjustment in the control action (Tension). This CFL response aimed to counter the deviation and effectively increased
towards zero by
s, aligning it with the CLF constraint and the corresponding control input. In this period, unlike the bump input, there was a larger increase in the suspension stroke (
m), resulting in a larger spike in the CBF constraint. This spike was adequate to steer the stroke toward zero, and consequently, the slack variable did not experience significant augmentation to relax the CLF. Conversely, beyond
s, the suspension stroke approached its limit (
m), prompting the CBF constraint to manifest substantial spikes. These spikes, in turn, led to an augmentation of the slack variable, relaxing the CLF, increasing the control input, and enforcing
toward zero. The figure shows that the LQR controller proved inadequate in constraining the suspension stroke within the predefined limits during the interval (
s).
5. Conclusions
The purpose of the proposed CLF-CBF-QP controller is to emphasize the effectiveness of safety-critical controllers in guaranteeing safety for active suspension systems, more precisely, limiting suspension stroke. Limiting suspension travel enables the suspension to absorb severe shocks caused by road disturbances without bottoming out or becoming excessively stiff, which is critical for human comfort, vehicle control, and safety.
In this study, we employed a safety-critical CLF-CBF-QP controller on a nonlinear quarter-car model featuring a suspension spring with cubic nonlinearity. The design process of the CLF-CBF-QP controller involves the design of a reference controller, Lyapunov function, and barrier function. The reference controller is designed generally in the CLF-CBF-QP controller design framework using steady-state analysis, which does not suit second-order problems, such as the suspension systems. Hence, we established the reference controller as an LQR controller based on the linearized quarter-car model. This reference state-feedback controller facilitated the design of the CLF based on the nonlinear model as a function of the sprung mass velocity only, establishing a relative degree of one. This CLF aims to enhance performance by accommodating nonlinearity and employing online optimization. Further, we constructed a CBF to prevent the suspension stroke from exceeding its defined limits.
We conduct closed-loop simulations to demonstrate the effectiveness of the CLF-CBF-QP controller in active suspension systems. The two distinct road profiles under investigation offer various complexities. The first road profile has a smooth sinusoidal bump with a peak height of
m, whereas the second has a ramped pothole with a depth of
m. The results from both simulations demonstrate substantial enhancements across various performance aspects, including sprung mass displacement, velocity, and suspension stroke, compared to the responses obtained with the reference LQR controller. Furthermore, it demonstrates the CLF-CBF-QP controller’s safety-critical capabilities in limiting the suspension stroke under challenging driving conditions. These results establish that the CLF-CBF-QP controller is very successful in improving performance and guaranteeing safety even though the designed reference controller is not capable of dealing with difficult driving conditions in terms of performance or safety. It is worth noting that the suggested controller is not restricted to a single type of suspension nonlinearity, such as cubic. It can handle a broad range of nonlinearities, including quadratic springs, hysteretic springs, and nonlinear dampers, as long as the nonlinear system is a control affine system. Future work may consider expanding the safety-critical CLF-CBF-QP controller to involve additional constraints, including sprung-mass acceleration and road-holding considerations. These safety constraints are crucial for conventional vehicles, especially in the context of autonomous vehicles. Moreover, employing the recently introduced fast global optimizers [
43] could facilitate the extension of the CLF-CBF-QP method to encompass non-affine systems, thereby enhancing its applicability and effectiveness across diverse engineering problems.








{kind=link}
{kind=link}
{kind=link}
{kind=link}