4.2. Analysis and Discussion
The Hypervolume metric is used as an evaluation criterion for multi-objective optimization algorithms. The table below presents a comparison between the NSGA-II-MC algorithm designed in this paper and traditional multi-objective optimization algorithms. Nine different constrained multi-objective optimization algorithms, namely AGEMOEA [
28], ANSGA-III [
29], ARMOEA [
30], CCMO [
31], CTAEA [
32], DCNSGA-III [
33], NSGA-II [
34], NSGA-III [
35], and RVEA [
36], which are considered to be the top performers in the field, are selected as benchmark algorithms. These algorithms were applied to solve the introduced energy management problem using the standard PlatEMO platform [
37]. The general configurations of NSGA-II-MC and the compared algorithms are kept the same, and are the default set of parameters in PlatEMO:
- (1)
The probability of crossover, the distribution index of simulated binary crossover, the expectation of the number of mutated variables, and the distribution index of polynomial mutation are set to 1, 20, 1, and 20, respectively;
- (2)
The maximum number of function evaluations was 100,000, i.e., the population size was 100 and the maximum number of iterations was set to 1000.
Other algorithm-specific configurations were chosen to be exactly the same as those in PlatEMO.
NaN values represent cases where the algorithm could not find any feasible solutions.
Table 6 provides the average Hypervolume values obtained by each algorithm over 21 runs on various scales of energy management problems, as well as the variance in the metric values across the 21 runs for each algorithm. Moreover, we use the Wilcoxon rank-sum test with
p < 0.05 to compare each algorithm with NSGA-II-MC. In the last column of the table, the symbols “+” and “−" indicate the number of test problems in which the compared algorithm shows significantly better performance or worse performance, respectively, than NSGA-II-MC. In addition, the symbol “=” indicates the number of test problems in which there is no significant difference between NSGA-II-MC and the compared algorithms.
From the numerical comparison results, it can be observed that the algorithm designed in this work outperforms all benchmark algorithms on energy management problems of varying scales. None of the compared algorithms shows significantly better performance than NSGA-II-MC according to the Wilcoxon rank-sum test. Note that CTAEA failed to find feasible solutions for most problems. In particular, the energy management problem with six controllable loads involves more decision variables and stricter power constraints, making it more challenging to solve. Results show that many algorithms failed to find feasible solutions for the six-scale problem, whereas the NSGA-II-MC algorithm proposed in this work consistently obtained feasible solutions. Additionally, it can be seen that the advantage of the NSGA-II-MC algorithm is relatively small for small-scale controllable load problems. However, as the number of controllable loads and problem constraints become more complex, the performance advantage of the NSGA-II-MC algorithm becomes more pronounced. Compared to the NSGA-II algorithm, the proposed NSGA-II-MC method achieved a 49.7% improvement in the Hypervolume metric on large-scale problems of six controllable loads. This demonstrates the effectiveness of the proposed algorithm, which can significantly improve the convergence performance and constraint-handling effectiveness of multi-objective optimization algorithms.
Furthermore,
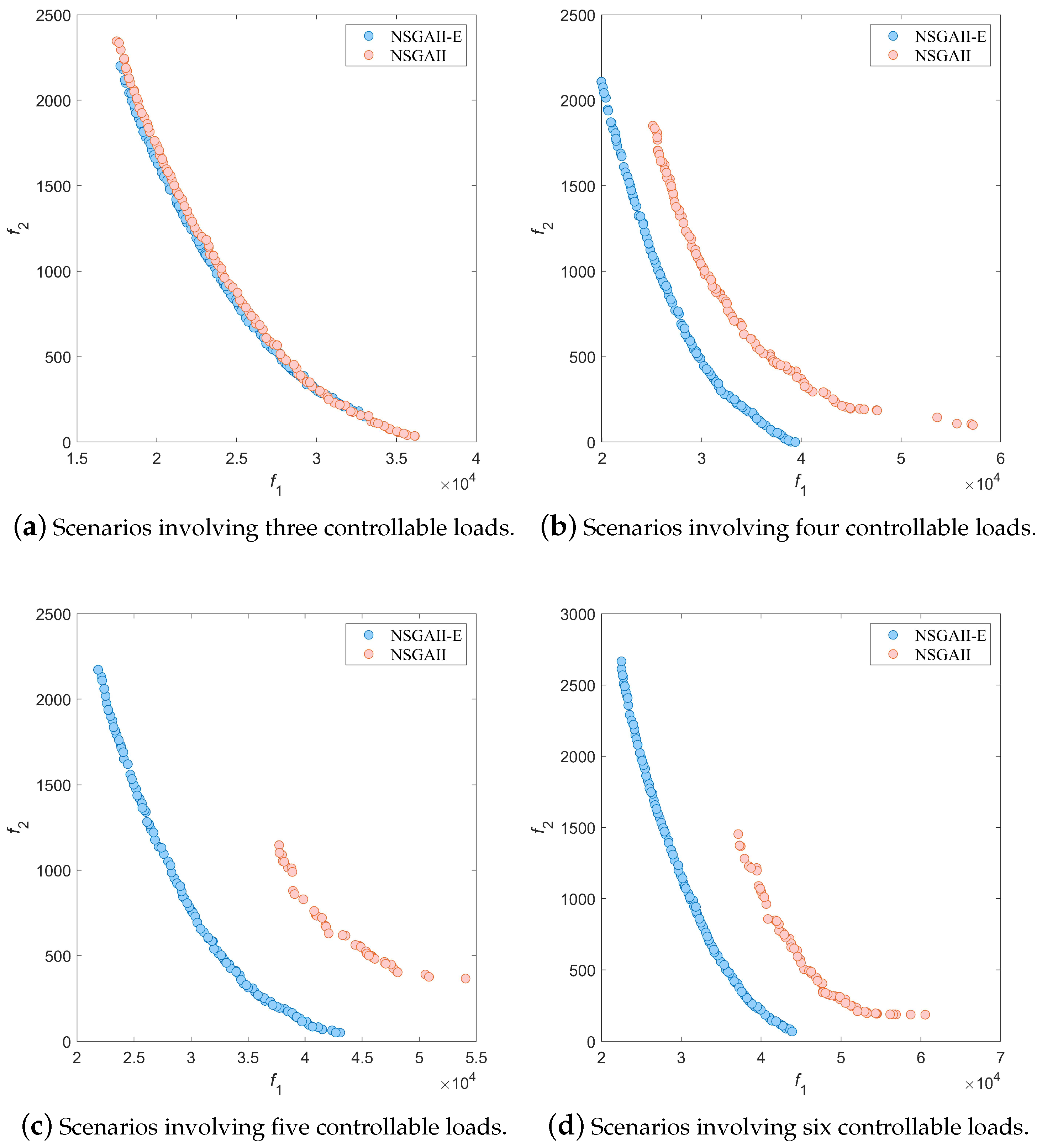
Figure 2 provides a comparison of the Pareto fronts between NSGA-II-MC and the traditional NSGA-II under different scenarios. The optimization objectives in the problems are minimizing operating costs and reducing dependence on the power grid. Each point on the Pareto front represents a management solution, with the horizontal and vertical axes representing the values of the two objective functions. Therefore, points closer to the origin indicate better convergence (optimality) of the algorithm. Multi-objective optimization also considers the diversity of the Pareto front, which involves how well a series of solutions can cover different objective preferences. This is reflected in the distribution of the Pareto front formed by a series of solutions. A more evenly distributed Pareto front that covers a wider range of objective values indicates better diversity. This means that more choices can be provided to decision-makers.
The results from
Figure 2 demonstrate that the NSGA-II-MC algorithm proposed in this paper exhibits significant advantages over the traditional NSGA-II algorithm, showcasing improved convergence and diversity. It is worth noting that in the scenario with three controllable loads, the algorithm proposed in this paper shows a relatively smaller advantage. However, as the complexity of the management decision problem increases, i.e., with an increasing number of loads to be scheduled, the traditional NSGA-II algorithm struggles to reliably optimize the problem. In contrast, the NSGA-II-MC algorithm designed in this paper demonstrates superior performance. In the scenario with six controllable loads, there is a noticeable gap between NSGA-II-MC and NSGA-II. As the problem scale increases and constraint complexity grows, the advantages of the NSGA-II-MC algorithm become more pronounced. This validates the effectiveness and reliability of the multi-objective optimization approach proposed in this paper.
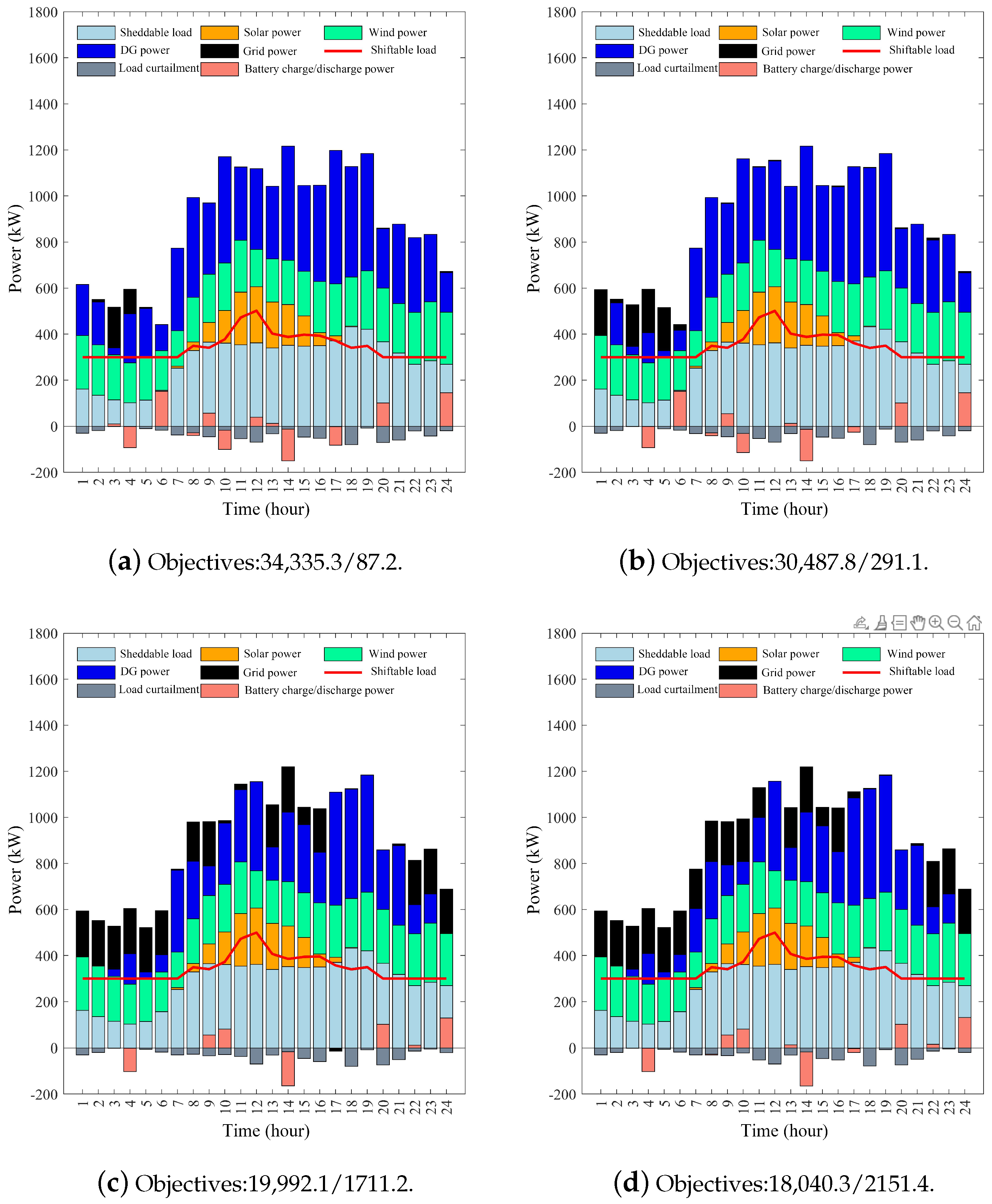
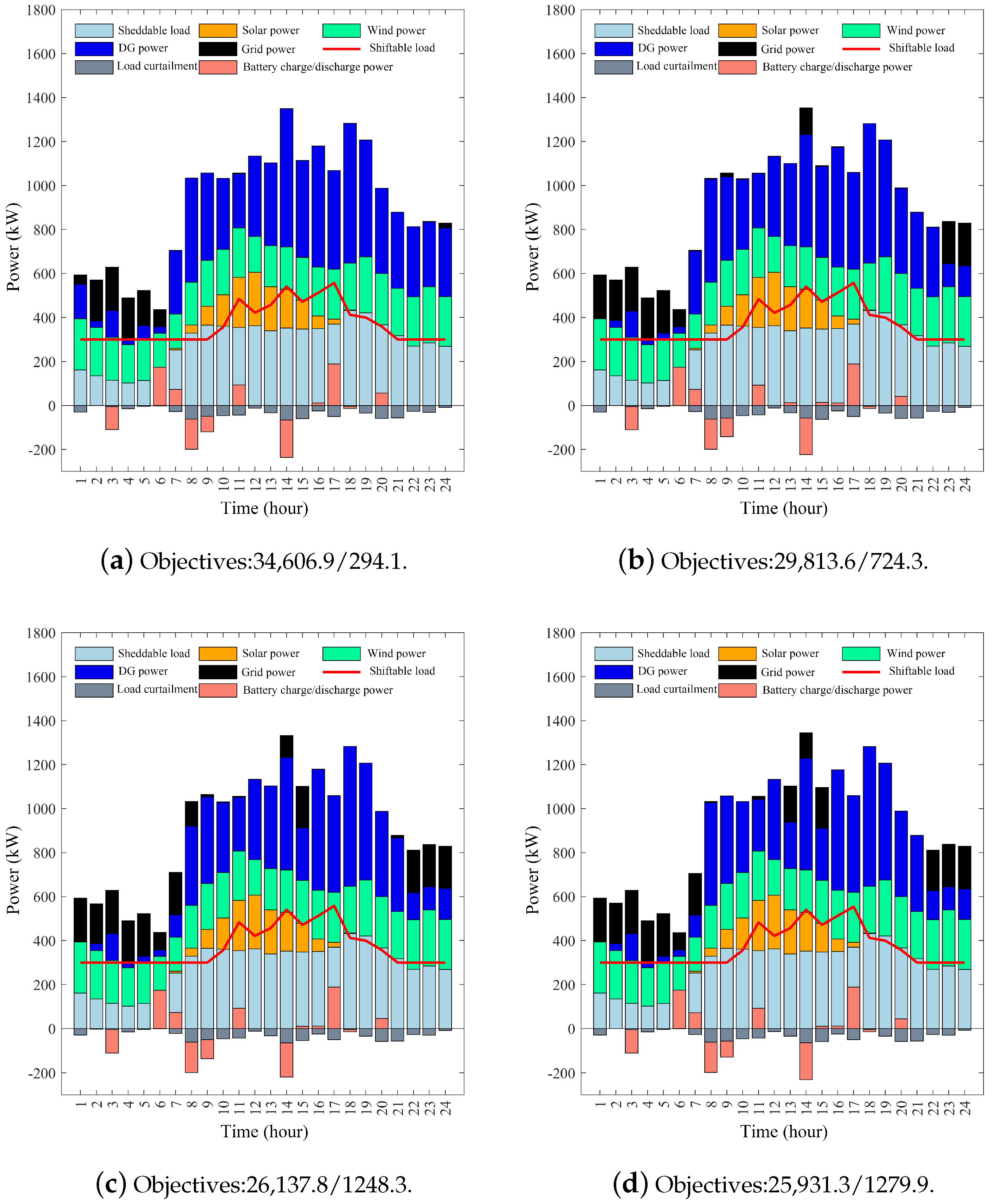
Figure 3 presents the management strategies under different objective preferences with three controllable loads, where (a–d) represent the strategies under various objective preferences. Objective one is the total cost, and objective two is the dependence on the main grid. The management strategy charts display the power generation, load power, charging and discharging states of energy storage batteries, regulation states of controllable loads, and the shedding of switchable loads at different times. Here, the black bar chart represents the power supply from the main grid, the light blue bar chart indicates the power of switchable loads, the light yellow bar chart shows the photovoltaic power generation, the green bar chart depicts the wind power generation, the blue bar chart is for the diesel engine’s power generation, the red line chart represents the regulation power of controllable loads (including critical loads), the grey bar chart shows the power shedding of switchable loads, and the pink bar chart represents the battery’s charging and discharging power. Positive values for the main grid power supply and battery discharging indicate power supply to the system/battery discharge, and negative values indicate selling power to the main grid/battery charging.
From the results in
Figure 3, it is evident that the management strategies under different objective preferences have significant differences. Strategy (a) represents the management strategy under the lowest dependence on the main grid, with the main grid supply power being noticeably the lowest and the grid dependence amounting to only USD 87.2 (for uniform comparison, all costs are calculated in U.S. dollars), but the system’s electricity cost is USD 34,335.3, indicating that the system is primarily powered by diesel generation, renewable generations, and energy storage batteries. However, because the diesel generator’s cost of generation is significantly higher than the electricity cost from the main grid, this leads to a noticeable increase in the system’s total electricity cost. Conversely, strategy (d) shows a significant increase in the main grid supply power, with grid dependence at USD 2151.4 but at a considerably reduced cost (USD 18,040.3), indicating that utilizing relatively cheaper main grid supply can effectively reduce system costs, albeit at the expense of significant dependence on the main grid.
The renewable energy generation situation under strategy (a) shows that around midnight, when photovoltaic cannot generate electricity and wind power is also low, but the base’s critical loads still need to run, the designed algorithm prioritizes power supply from the main grid, followed by energy storage battery supply to meet the demand of critical loads; around noon, when renewable energy sources like photovoltaic and wind have sufficient generation and load demand decreases, the algorithm charges the energy storage battery to meet the potential high load demand later, showing the rationality of the method. It is worth noting that strategies (a) and (d) are the first and last on the Pareto front, representing management strategies under a single-objective preference, while (b) and (c) are two randomly selected strategies from the middle of the Pareto front, representing management strategies considering a balance between the two objectives. Therefore, it can be seen that the multi-objective optimization method designed in this paper can provide multiple management strategies under different objective preferences in a single run, thereby offering various choices for decision-makers, dynamically managing the system’s energy storage, generation, load shedding, and load scheduling based on the available external power supply conditions.
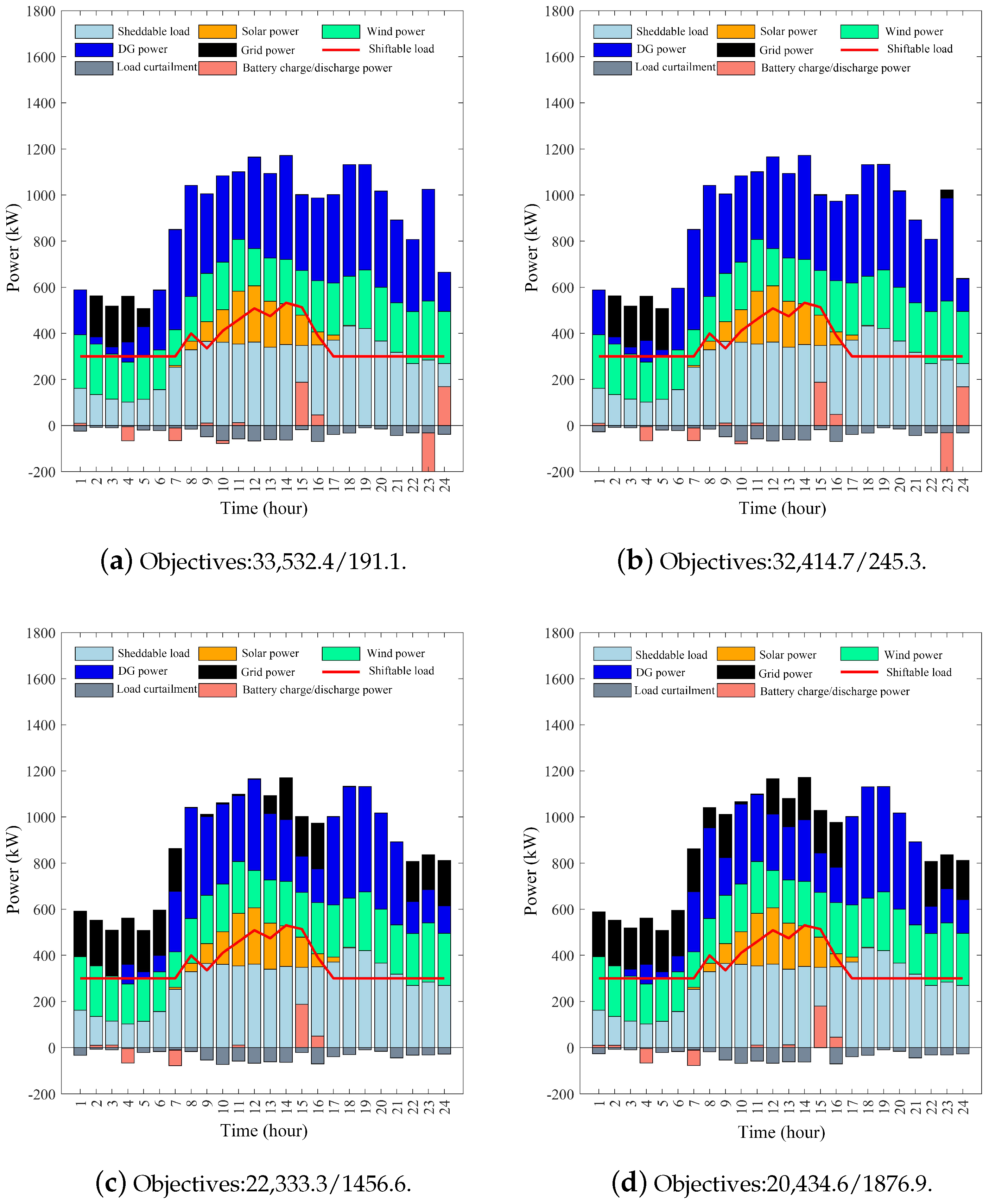
Figure 4 displays the management strategies under different objective preferences with four controllable loads, where (a–d) represent the strategies under various objective preferences. Compared to the scenario with three controllable loads shown in
Figure 3, the addition of one more controllable load significantly changes the system’s management mode. During the peak energy demand period of critical and controllable loads from 13:00 to 15:00, the management algorithm designed in this paper tends to ensure energy balance by supplying power through the energy storage system and shedding loads to meet the system’s electricity demand. In the low-grid-dependence mode shown in (a), there is no need for grid power supply during this period, and the electricity demand shortfall is compensated by using diesel generators; in the low-operational cost-mode shown in (d), cost savings are achieved by supplying power through the main grid during this period. Due to the high cost of generation, diesel generators serve as a supplementary energy source at different times to address the issue of insufficient power from the energy storage batteries and renewable energy sources to meet electricity demand.
Figure 5 illustrates the management strategies under different objective preferences with five controllable loads, where (a–d) represent the strategies under various objective preferences. Compared to the scenarios with three and four controllable loads discussed above, the utilization rate of energy storage batteries significantly increases in this scenario due to the higher number of load demands, requiring frequent adjustments among various power supply resources. In the period from 22:00 to 24:00, with the same total load demand, the low-grid-dependence mode shown in (a) fulfills the system’s electricity needs using diesel generators, while scenarios (b–d), depending on their respective management modes and preferences for grid dependence, supply electricity demands from the main grid in varying proportions, demonstrating the algorithm’s rationality.
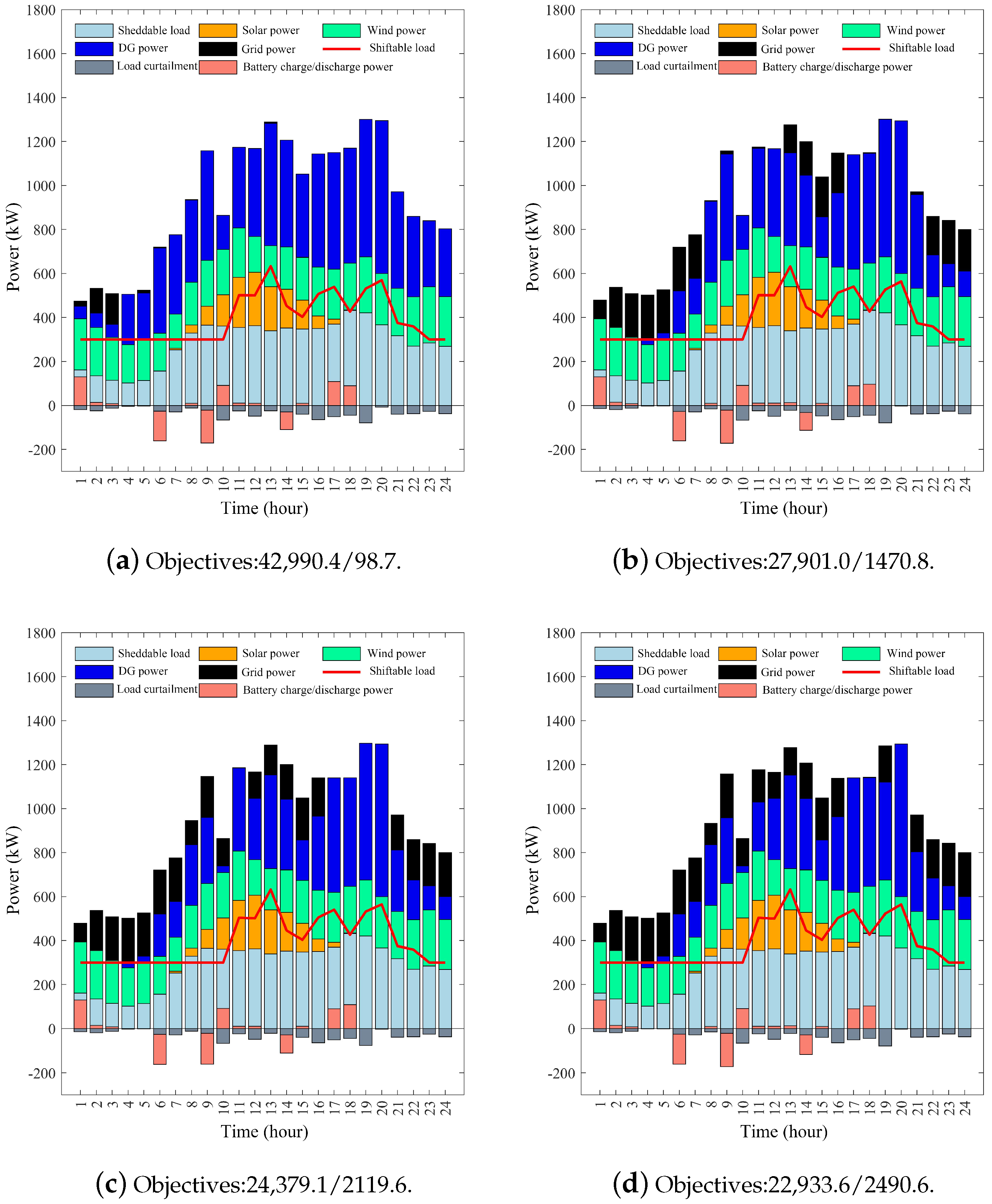
Figure 6 presents the management strategies under different objective preferences with six controllable loads. In scenarios with multiple controllable loads, the complexity of the system increases, leading inevitably to higher overall operational costs and greater dependence on the main grid. From the scenario operation diagrams, it can be observed that the addition of controllable loads creates a peak electricity demand period from 19:00 to 20:00. In the low-grid-dependence management mode (a), the algorithm exclusively uses diesel generators for power supply, resulting in high operational costs of USD 42,990.4. In contrast, management mode (d), which utilizes electricity from the main grid, can effectively reduce system costs.
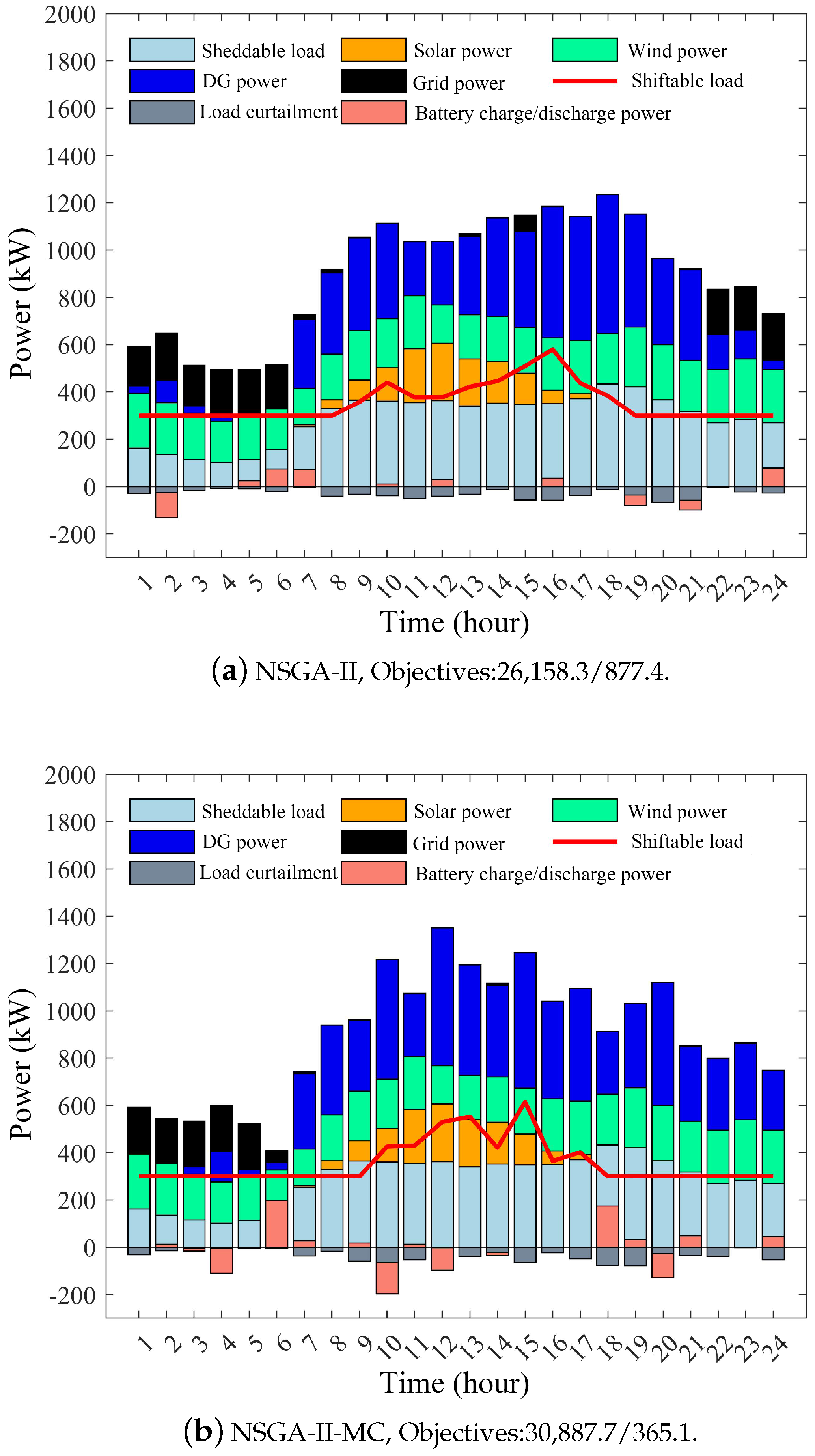
In addition,
Figure 7 shows the comparative results of management strategies under four controllable loads scenarios between the NSGA-II-MC and NSGA-II algorithms. This experiment selected the solutions at the bottom of the Pareto front, i.e., the scenarios with the lowest dependency on the main grid. However, it can be seen from the results that the traditional NSGA-II algorithm struggles to meet this preference, still relying heavily on the main grid for power supply, whereas the NSGA-II-MC algorithm tends towards using diesel generators, better satisfying user preferences.
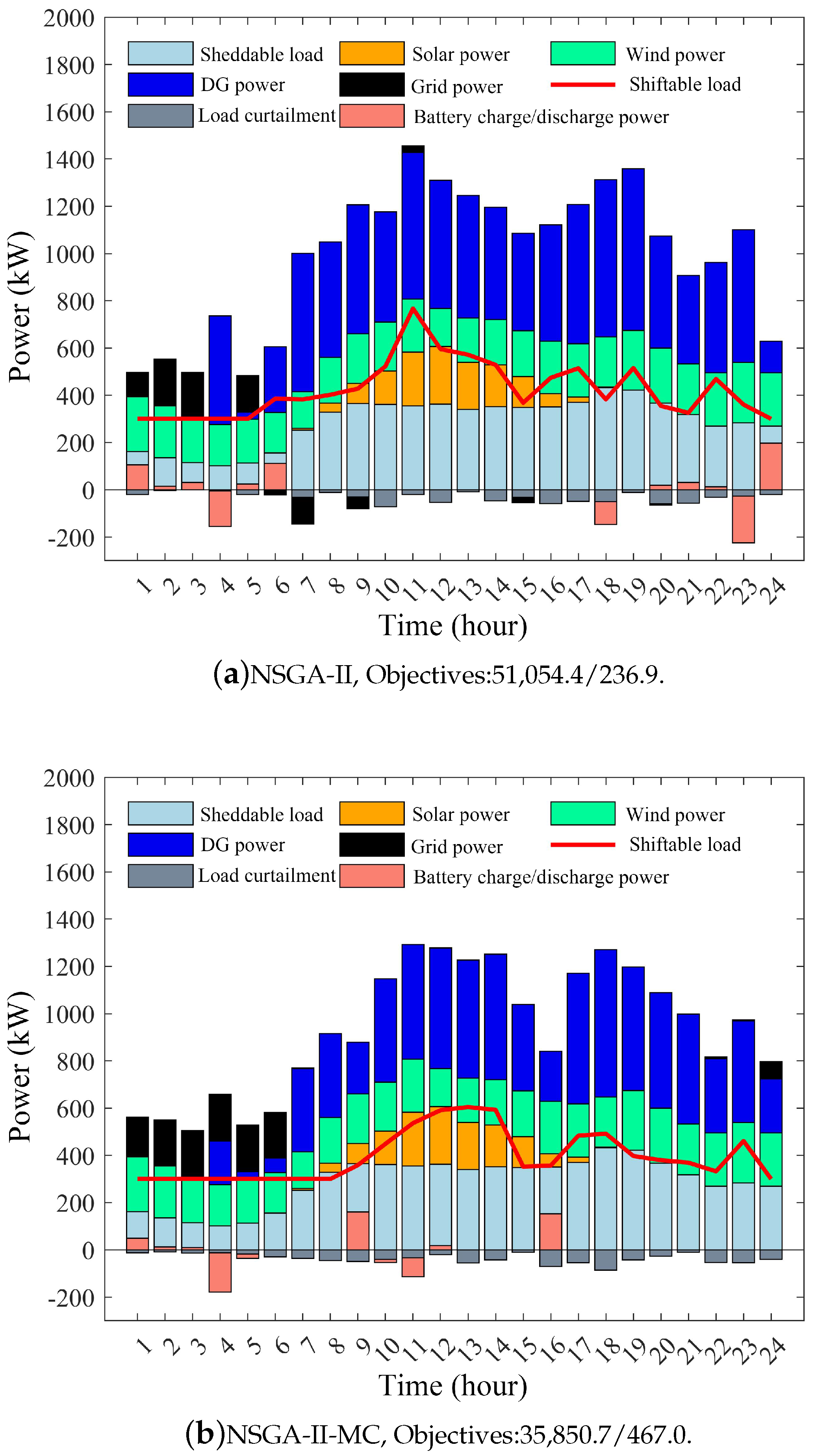
Figure 8 presents the comparison of management strategies between the NSGA-II-MC and NSGA-II algorithms under scenarios with six controllable loads. Comparing the objective values of the two solutions reveals that, in the complex management scenario of six controllable loads, the NSGA-II algorithm struggles to achieve effective optimization, with operational costs reaching USD 51,054.4. Meanwhile, the management strategy derived from the NSGA-II-MC algorithm can achieve a reduction of more than USD 16,000 in operational costs with only about 200 increases in dependency level, demonstrating a clear advantage in algorithm convergence.
The results above indicate that the multi-objective optimization method proposed in this paper can intelligently generate management strategies for resilient microgrids with different objective preferences. With a single run, it is possible to obtain management plans with varying degrees of grid dependence. For example, in a military base, management modes with low grid dependence are suitable for wartime energy system management, while those with low operational costs are suitable for the economical operation of energy systems during peacetime. Furthermore, the results demonstrate that the traditional NSGA-II algorithm had difficulty meeting various preferences and failed to converge under stringent constraints, resulting in high costs and substantial reliance on the grid. In contrast, the proposed NSGA-II-MC algorithm can efficiently manage these constraints and generate satisfactory energy management solutions tailored to diverse preferences.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}