
Dynamic Modeling and Improved Nonlinear Model Predictive Control of a Free-Floating Dual-Arm Space Robot

Abstract
:1. Introduction
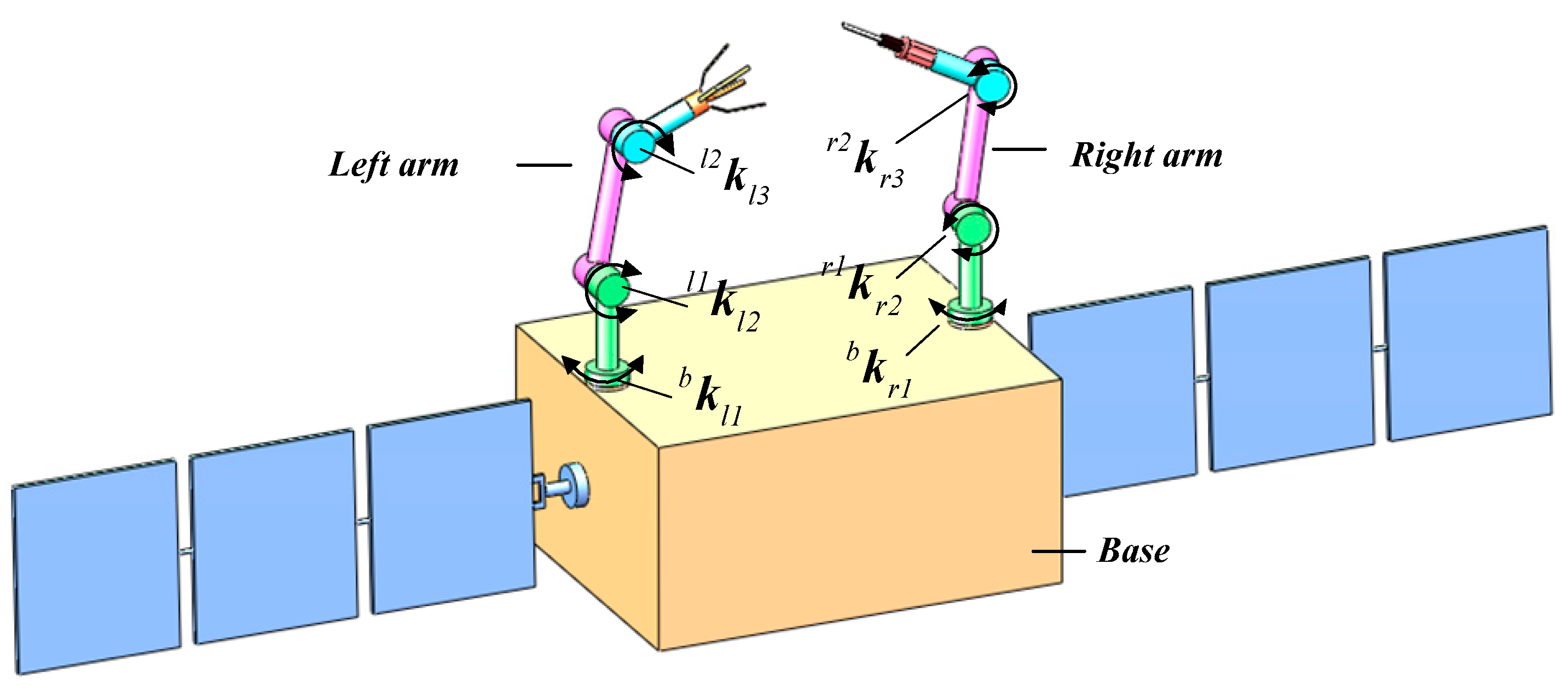
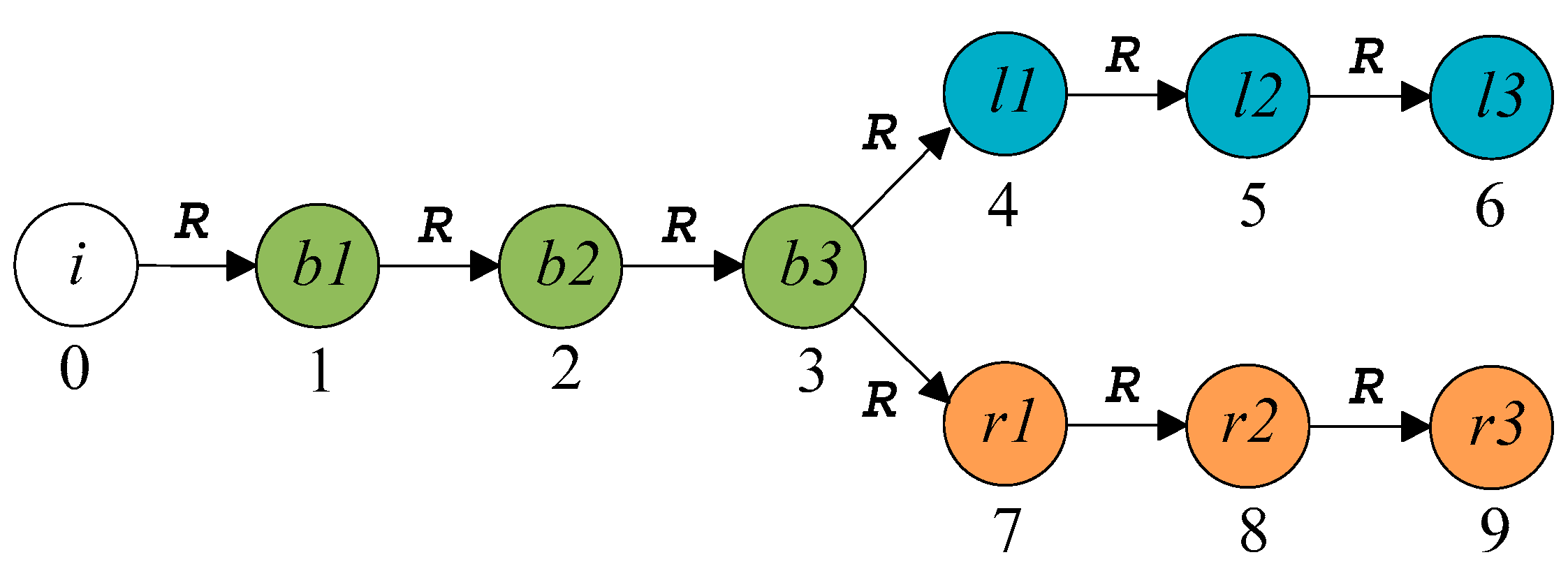
2. Dynamic Modeling of Free-Floating Dual-Arm Space Robot
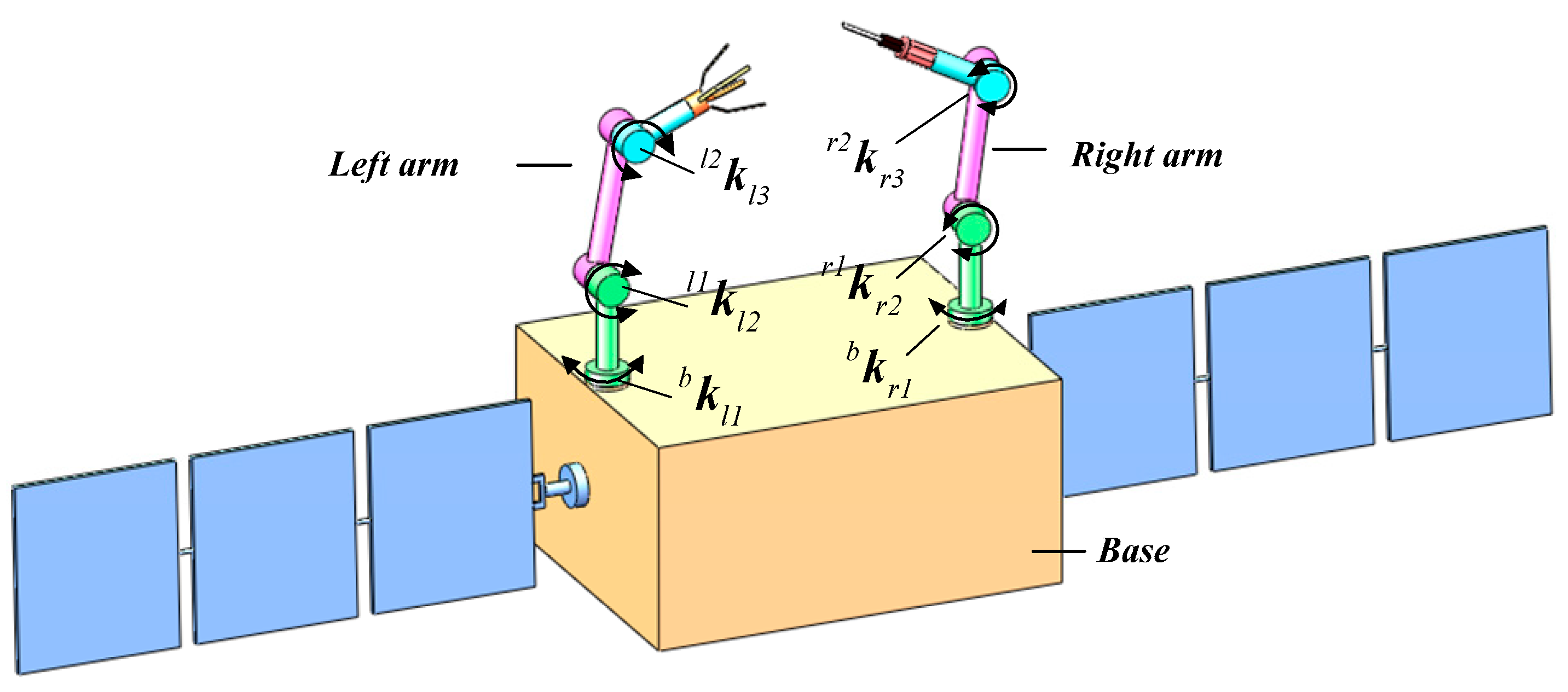
2.1. Kinematic Modeling
2.2. Dynamic Modeling
3. Design of the Improved NMPC Controller
3.1. Design of the NMPC Controller
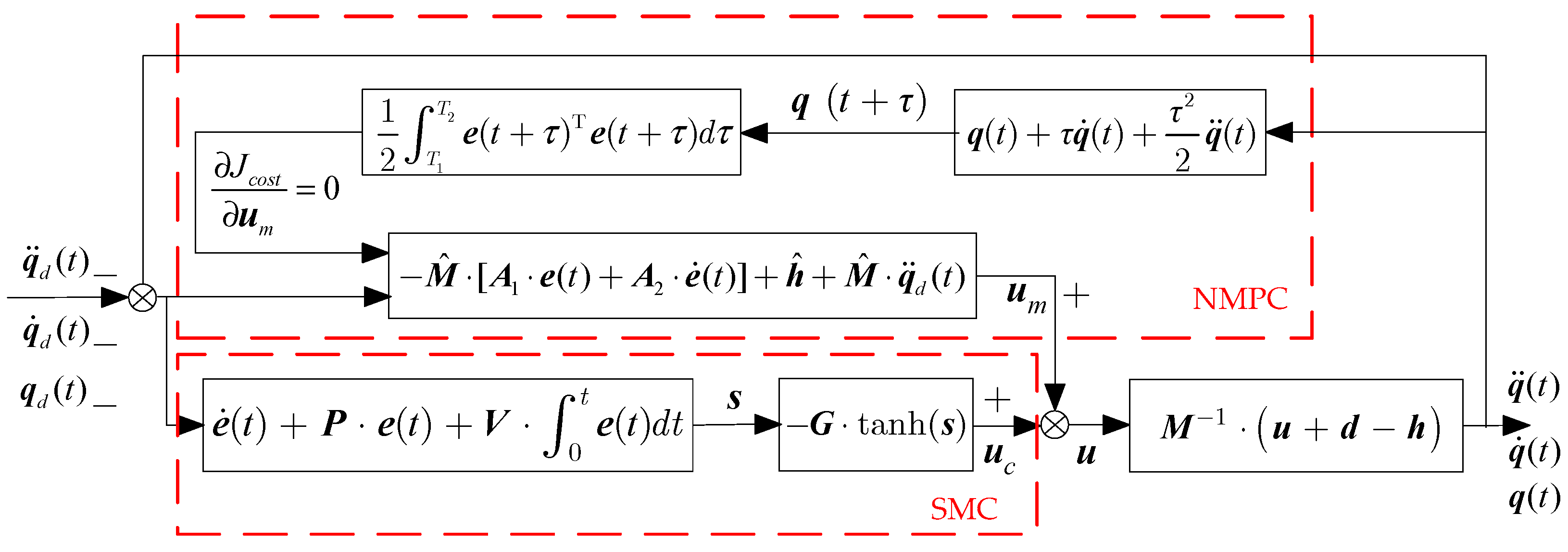
3.2. Design of an Improved NMPC Controller Based on Sliding Mode Variable Structure
3.3. Analysis of Stability
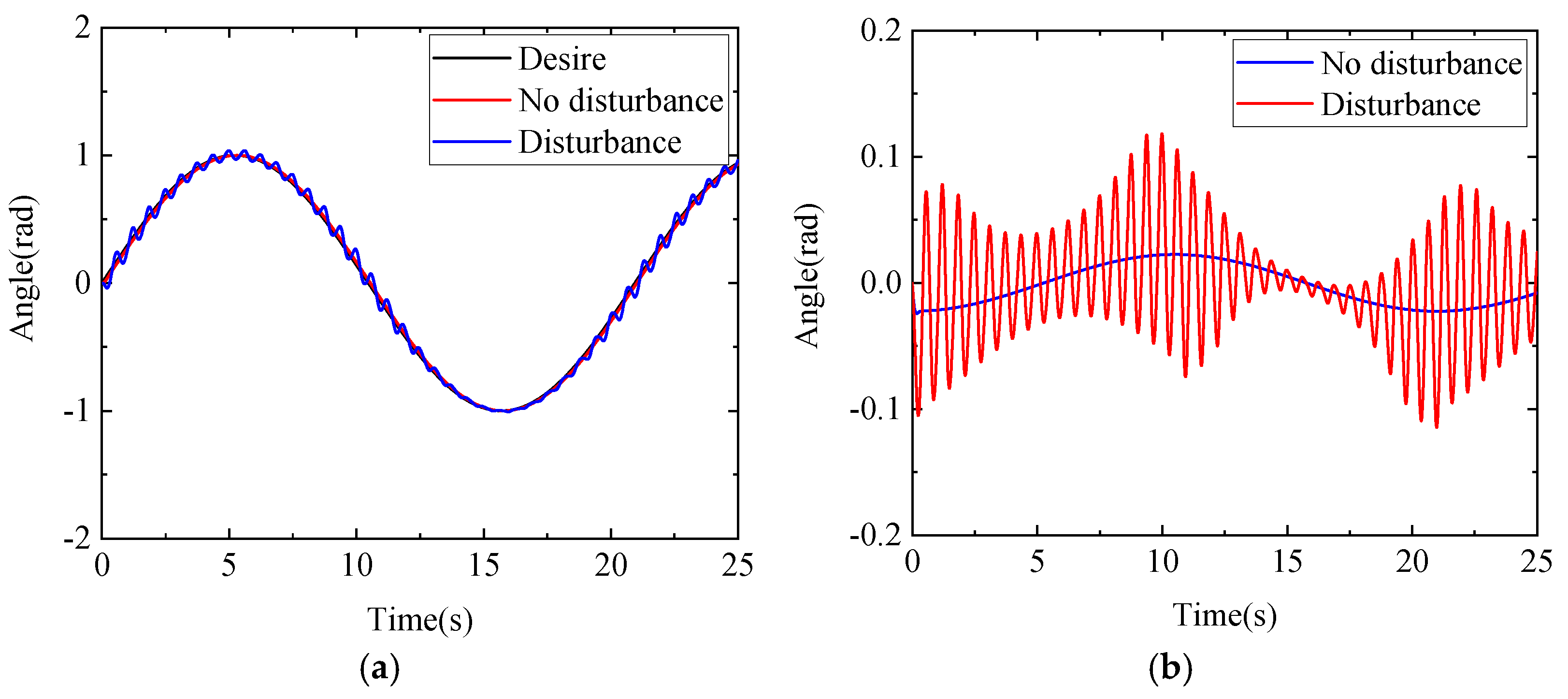
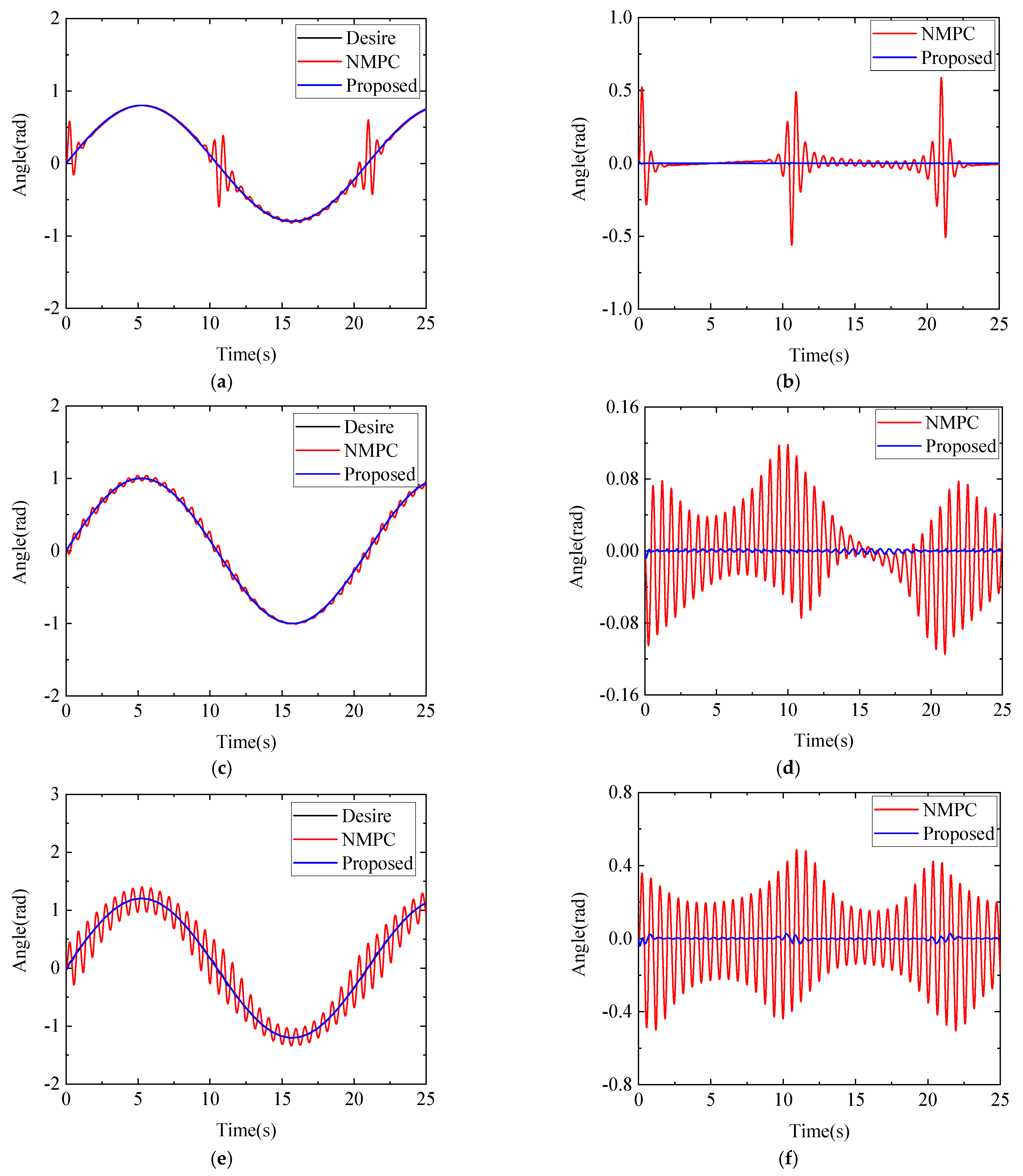
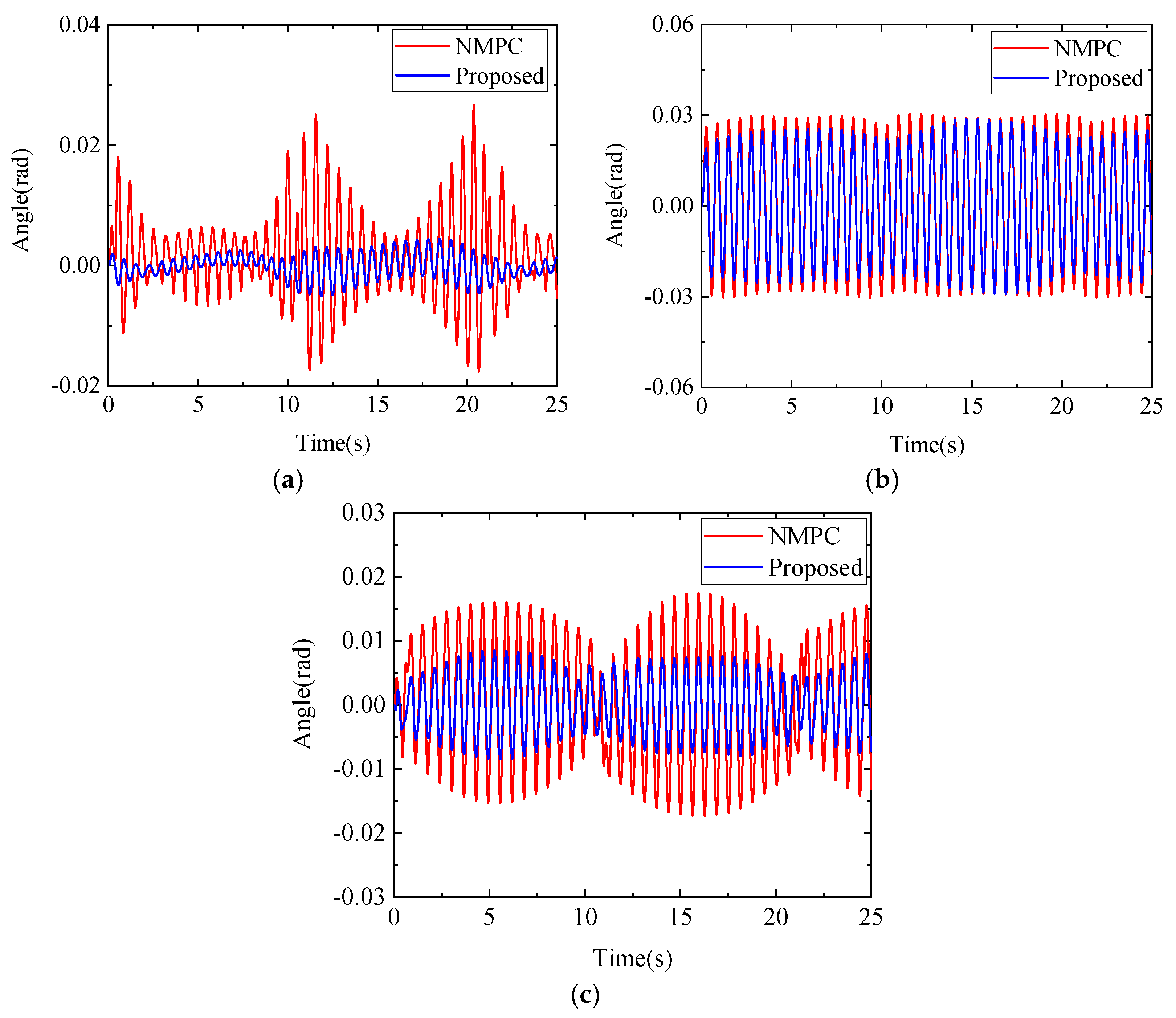
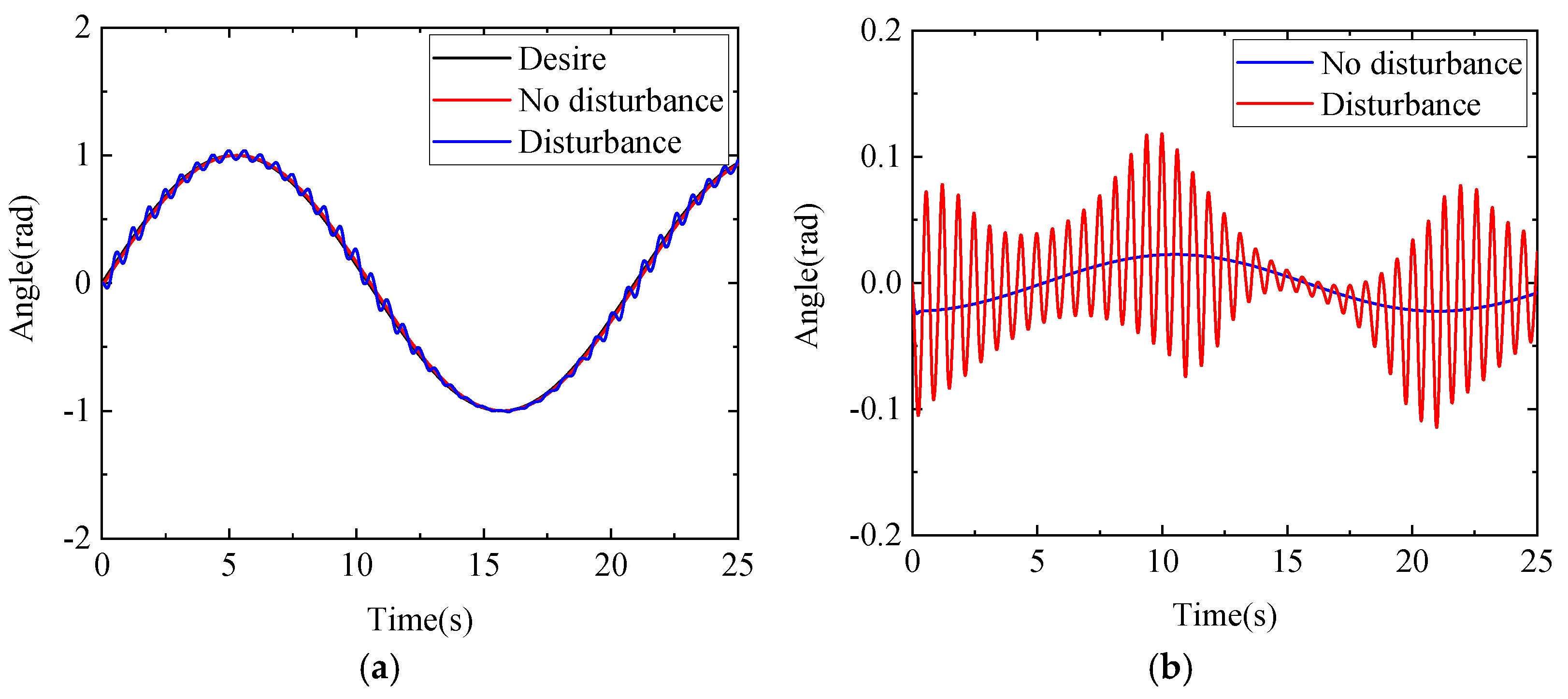
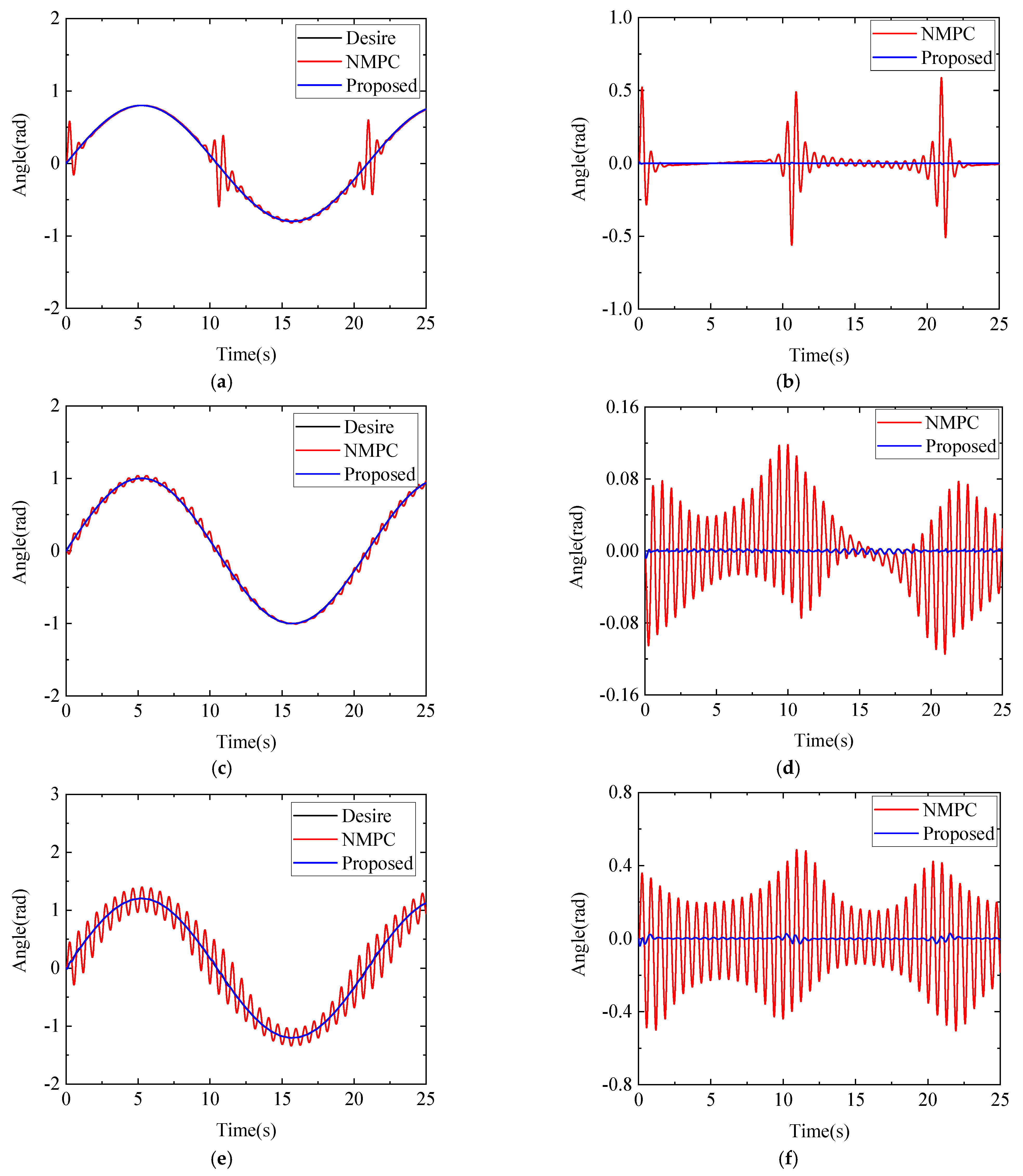
4. Simulation
5. Discussion
- Dynamic modeling:
- (1)
- The free-floating dual-arm space robot studied in this paper is a complex multibody system with nine DOF. The modeling efficiency of the traditional explicit multibody system dynamic modeling method needs to be improved. For example, when the pseudo inertia matrix method [19,20] is used, the pseudo inertia matrix, the homogeneous transformation matrix, and other intermediate variables need to be calculated; when the generalized momentum method [21] is used, although the computational efficiency of the inertia matrix is higher than that of the pseudo inertia matrix method, it is also necessary to derive and calculate the intermediate variables such as the Jacobian matrix, and the generalized momentum method cannot explicitly establish the bias force vector. The space robot modeling method in this paper avoids the definition and operation of intermediate variables, and its modeling efficiency is higher than the traditional explicit modeling method. The highest computational complexity is obtained when all joint types of the robot are considered as rotational joints. Table 2 shows the comparison of the computational complexity of the inertia matrix M and the bias force vector h in the calculation of an n-DOF robot with full rotational joints when the three different explicit dynamics modeling methods are adopted. Table 2 shows that the computational complexity of the explicit canonical method in this paper is significantly lower than those of the other two methods.
- (2)
- Due to the floating characteristics of the base of the free-floating space robot, it is difficult to combine the traditional explicit dynamic modeling method with DEM, because it requires tedious and complex analysis processes, such as the definition and operation of complex intermediate variables. When combined with DEM, our explicit canonical dynamic modeling method can avoid the tedious and complex analysis of intermediate variables.
- (3)
- Due to the inconvenient modeling method, most of the literature in the study of space robot dynamics and control only simulates the plane situation of the two-DOF manipulator, which makes it difficult to reflect the real working state of the complex multi-DOF space robot. When using the proposed explicit dynamic modeling method, it is easy to establish a dynamic model for complex multi-DOF space robot for control research.
- Control:
- (1)
- Compared with other traditional control methods, research on the NMPC method applied to space robots is not extensive enough. Recently, Tomasz Rybus [11,44] explored the possibility of using the NMPC method to control manipulators mounted on free-floating space robots. However, Tomasz Rybus [11,44] only considered the trajectory tracking control of the end manipulator of the free-floating space robot, and did not consider the stable control of the attitude of the base of the free-floating space robot. In addition, Tomasz Rybus [11,44] only carried out dynamic modeling and simulation verification of the NMPC method for a two-DOF planar manipulator. This paper not only considers the trajectory tracking control of the end manipulator of the free-floating space robot, but also considers the stable control of the base attitude of the free-floating space robot. In addition, the dynamic modeling and control simulation of the free-floating dual-arm space robot with nine DOF are carried out in this paper.
- (2)
- The free-floating space robot has high requirements on the accuracy of trajectory tracking and the stability of the base attitude. The traditional NMPC method has difficulty meeting these requirements. This paper innovatively introduces the idea of sliding mode variable structure to improve the traditional NMPC method. The proposed improved NMPC method has better robustness and can better meet the requirements of trajectory tracking accuracy and base attitude stability for free-floating space robots serving in orbit.
- (3)
- Inspired by the literature [15], the control system in this paper consists of a combined controller for the base and the arms, rather than two separate controllers, which can reduce the risk of failure.
6. Conclusions
- (1)
- Based on a new explicit multi-rigid-body dynamic modeling method and employing the concept of DEM, the dynamic model of a free-floating dual-arm space robot is established. The modeling process of the model is simple and standardized, which is convenient for computer programming.
- (2)
- After introducing the control idea of the sliding mode variable structure into the traditional NMPC method, a novel NMPC controller is designed, which effectively solves the problem of tracking the desired trajectory and stabilizing the base attitude of the free-floating dual-arm space robot under unknown model uncertainty and external disturbance.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Description | Symbols | Description |
|---|---|---|---|
| Angular position along | |||
| Closed subtree of link u | Kinematic chain from i to l | ||
| Mass of link k | Inertia tensor of link k | ||
| Inertial force matrix of revolute joint u | Bias force vector of revolute joint u | ||
| resultant torque on axis except gravity | uth row and kth column element of inertia matrix |
Appendix B
- Because the inertia matrix M[·][·] is a symmetric matrix, and because we are limited by the length of the article, the following are only the explicit expressions of the corresponding elements in the upper left corner of the M[·][·] matrix in Equation (19).
- The explicit expressions of the bias force vector h[·] of the left arm and the right arm of the free-floating dual-arm space robot with symmetrical tree-chain topology are very similar. Since we are limited by the length of the article, the following are only the explicit expressions of the corresponding elements of the base and the left arm in the h[·] vector in Equation (19).
Appendix C
References
- Zong, L.; Emami, M.R.; Luo, J. Reactionless Control of Free-Floating Space Manipulators. ITAES 2019, 56, 1490–1503. [Google Scholar] [CrossRef]
- Chu, X.; Hu, Q.; Zhang, J. Path Planning and Collision Avoidance for a Multi-Arm Space Maneuverable Robot. ITAES 2017, 54, 217–232. [Google Scholar] [CrossRef]
- Wang, D.; Huang, P.; Meng, Z. Coordinated stabilization of tumbling targets using tethered space manipulators. ITAES 2015, 51, 2420–2432. [Google Scholar] [CrossRef]
- Dou, B.; Yue, X. Disturbance observer-based fractional-order sliding mode control for free-floating space manipulator with disturbance. Aerosp. Sci. Technol. 2023, 132, 108061. [Google Scholar] [CrossRef]
- Meng, D.; Xu, H.; Xu, H.; Sun, H.; Liang, B. Trajectory tracking control for a cable-driven space manipulator using time-delay estimation and nonsingular terminal sliding mode. Control Eng. Pract. 2023, 139, 105649. [Google Scholar] [CrossRef]
- Wu, H.; Hu, Q.; Shi, Y.; Zheng, J.; Sun, K.; Wang, J. Space manipulator optimal impedance control using integral reinforcement learning. Aerosp. Sci. Technol. 2023, 139, 108388. [Google Scholar] [CrossRef]
- Jayakody, H.S.; Shi, L.; Katupitiya, J.; Kinkaid, N. Robust Adaptive Coordination Controller for a Spacecraft Equipped with a Robotic Manipulator. J. Guid. Control Dyn. 2016, 39, 2699–2711. [Google Scholar] [CrossRef]
- Sallaberger, C.; Force, S.P.T.; Agency, C.S. Canadian space robotic activities. Acta Astronaut. 1997, 41, 239–246. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, Z.; Gao, J.; Gan, S.; Kang, E. High performance assembly of complex structural parts in special environments–research on space manipulator assisted module docking method. Robot. Intell. Autom. 2023, 43, 122–131. [Google Scholar] [CrossRef]
- Zhu, Y.; Qiao, J.; Guo, L. Adaptive Sliding Mode Disturbance Observer-Based Composite Control With Prescribed Performance of Space Manipulators for Target Capturing. ITIE 2018, 66, 1973–1983. [Google Scholar] [CrossRef]
- Rybus, T.; Seweryn, K.; Sasiadek, J.Z. Control System for Free-Floating Space Manipulator Based on Nonlinear Model Predictive Control (NMPC). JIRS 2017, 85, 491–509. [Google Scholar] [CrossRef]
- Wei, Y.; Yang, X.; Xu, Z.; Bai, X. Novel ground microgravity experiment system for a spacecraft-manipulator system based on suspension and air-bearing. Aerosp. Sci. Technol. 2023, 141, 108587. [Google Scholar] [CrossRef]
- Kernot, J.E.; Ulrich, S. Adaptive control of a tendon-driven manipulator for capturing non-cooperative space targets. JSpRo 2022, 59, 111–128. [Google Scholar] [CrossRef]
- Ogilvie, A.; Allport, J.; Hannah, M.; Lymer, J. Autonomous Satellite Servicing Using the Orbital Express Demonstration Manipulator System. In Proceedings of the 9th International Symposium on Artificial Intelligence, Robotics Automation in Space, Los Angeles, CA, USA; 2008; pp. 25–29. [Google Scholar]
- Seddaoui, A.; Saaj, C.M. Combined Nonlinear H∞ Controller for a Controlled-Floating Space Robot. J. Guid. Control Dyn. 2019, 42, 1878–1885. [Google Scholar] [CrossRef]
- Liu, X.; Li, H.; Chen, Y.; Cai, G.; Wang, X. Dynamics and control of capture of a floating rigid body by a spacecraft robotic arm. Multibody Syst. Dyn. 2015, 33, 315–332. [Google Scholar] [CrossRef]
- Ding, W.H.; Deng, H.; Li, Q.M.; Xia, Y.M. Control-orientated dynamic modeling of forging manipulators with multi-closed kinematic chains. Robot. Comput. Integr. Manuf. 2014, 30, 421–431. [Google Scholar] [CrossRef]
- Xu, X.R.; Chung, W.J.; Choi, Y.H.; Ma, X.F. A new approach for modeling and computation of dynamics of robots containing closed chains. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems, Victoria, BC, Canada, 17 October 1998. [Google Scholar]
- Uicker, J.J. History of Multibody Dynamics in the U.S. J. Comput. Nonlinear Dyn. 2016, 11, 060302. [Google Scholar] [CrossRef]
- Li, C. A New Lagrangian Formulation of Dynamics for Robot Manipulators. J. Dyn. Syst. Meas. Control 1989, 111, 545. [Google Scholar] [CrossRef]
- Siciliano, B.; Sciavicco, L.; Villani, L.; Oriolo, G. Robotics: Modelling, Planning and Control; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Yang, Y.; Ju, H.; Wang, K. An innovative joint-space dynamic theory for rigid multi-axis system-Part I: Fundamental principles. Appl. Math. Model. 2022, 110, 28–44. [Google Scholar] [CrossRef]
- Wang, K.; Ju, H.; Yang, Y. An innovative joint-space dynamic theory for rigid multi-axis system—Part II: Canonical dynamic equations. Appl. Math. Model. 2022, 110, 475–492. [Google Scholar] [CrossRef]
- Shao, X.; Sun, G.; Xue, C.; Li, X. Nonsingular terminal sliding mode control for free-floating space manipulator with disturbance. Acta Astronaut. 2021, 181, 396–404. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, J.; Gao, Q.; Ju, Z. Adaptive robust decoupling control of multi-arm space robots using time-delay estimation technique. Nonlinear Dyn. 2020, 100, 2449–2467. [Google Scholar] [CrossRef]
- Nguyen-Huynh, T.C.; Sharf, I. Adaptive Reactionless Motion and Parameter Identification in Postcapture of Space Debris. J. Guid. Control Dyn. 2013, 36, 404–414. [Google Scholar] [CrossRef]
- James, F.; Shah, S.V.; Singh, A.K.; Krishna, K.M.; Misra, A.K. Reactionless Maneuvering of a Space Robot in Precapture Phase. JGCD 2016, 39, 2419–2425. [Google Scholar] [CrossRef]
- Dubowsky, S.; Papadopoulos, E. The kinematics, dynamics, and control of free-flying and free-floating space robotic systems. IEEE Trans. Robot. Autom. 1993, 9, 531–543. [Google Scholar] [CrossRef]
- Papadopoulos, E.; Dubowsky, S. On the nature of control algorithms for free-floating space manipulators. ITRA 1991, 7, 750–758. [Google Scholar] [CrossRef]
- Vafa, Z.; Dubowsky, S. The Kinematics and Dynamics of Space Manipulators: The Virtual Manipulator Approach. IJRR 1990, 9, 3–21. [Google Scholar] [CrossRef]
- Pazelli, T.F.P.A.T.; Terra, M.H.; Siqueira, A.A.G. Experimental investigation on adaptive robust controller designs applied to a free-floating space manipulator. Control Eng. Pract. 2011, 19, 395–408. [Google Scholar] [CrossRef]
- Liang, B.; Xu, Y.; Bergerman, M. Dynamically equivalent manipulator for space manipulator system. 1. In Proceedings of the Proceedings of International Conference on Robotics and Automation, Albuquerque, NM, USA, 25 April 1997. [Google Scholar]
- Guo, Y.; Chen, L. Robust Control of Dual-Arm Space Robot Systems with Two Objects in Joint Space. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems, Beijing, China, 9–15 October 2006; pp. 5091–5095. [Google Scholar]
- Flores-Abad, A.; Ou, M.; Pham, K.; Ulrich, S. A review of space robotics technologies for on-orbit servicing. PrAeS 2014, 68, 1–26. [Google Scholar] [CrossRef]
- Cocuzza, S.; Pretto, I.; Debei, S. Least-Squares-Based Reaction Control of Space Manipulators. J. Guid. Control Dyn. 2012, 35, 976–986. [Google Scholar] [CrossRef]
- Shi, Z.; Huang, X.X.; Tan, Q.; Tian-Jian, H.U. Fractional-order PID control for teleoperation of a free-flying space robot. Control Theory Appl. 2016, 33, 800–808. [Google Scholar]
- Liu, J.; Vazquez, S.; Wu, L.; Marquez, A.; Gao, H.; Franquelo, L.G. Extended State Observer-Based Sliding-Mode Control for Three-Phase Power Converters. ITIE 2016, 64, 22–31. [Google Scholar] [CrossRef]
- Guanghui; Sun; Ligang; Wu; Zhian; Kuang; Zhiqiang; Ma; Jianxing, Practical tracking control of linear motor via fractional-order sliding mode. Autom 2018, 94, 221–235. [CrossRef]
- Slotine, J.; Li, W.P. Applied Nonlinear Control; China Machine Press: Beijing, China, 1991. [Google Scholar]
- Korayem, M.H.; Taherifar, M.; Tourajizadeh, H. Compensating the flexibility uncertainties of a cable suspended robot using SMC approach. Robot 2015, 33, 578–598. [Google Scholar] [CrossRef]
- Tsuda, S.; Kobayashi, T. Space Robot Control for Unknown Target Handling. In International Conference on Advances in Intelligent Control and Innovative Computing; Springer: New York, NY, USA, 2012; pp. 11–24. [Google Scholar]
- Song, Z.; Chao, D.; Wang, J.; Wu, Q. Chattering-free full-order recursive sliding mode control for finite-time attitude synchronization of rigid spacecraft. J. Frankl. Inst. 2019, 356, 998–1020. [Google Scholar] [CrossRef]
- Gui, H.; Vukovich, G. Adaptive integral sliding mode control for spacecraft attitude tracking with actuator uncertainty. J. Frankl. Inst. 2015, 352, 5832–5852. [Google Scholar] [CrossRef]
- Rybus, T.; Seweryn, K.; Sąsiadek, J.Z. Nonlinear Model Predictive Control (NMPC) for Free-Floating Space Manipulator. In Aerospace Robotics III; Sasiadek, J., Ed.; Springer International Publishing: Cham, Switzerland, 2019; pp. 17–29. [Google Scholar]
- Raimondo, D.M.; Limon, D.; Lazar, M.; Magni, L.; Camacho, E.F. Min-max Model Predictive Control of Nonlinear Systems: A Unifying Overview on Stability. Eur. J. Control 2009, 15, 5–21. [Google Scholar] [CrossRef]
- Rahideh, A.; Shaheed, M.H. Stable model predictive control for a nonlinear system. J. Frankl. Inst. 2011, 348, 1983–2004. [Google Scholar] [CrossRef]
- Shi, L.; Kayastha, S.; Katupitiya, J. Robust coordinated control of a dual-arm space robot. Acta Astronaut. 2017, 138, 475–489. [Google Scholar] [CrossRef]
- Featherstone, R. Rigid Body Dynamics Algorithms; Springer US: New York, NY, USA, 2008. [Google Scholar]
- Xiao, P.; Ju, H.; Li, Q.; Meng, J.; Chen, F. A New Fixed Axis-Invariant Based Calibration Approach to Improve Absolute Positioning Accuracy of Manipulators. IEEE Access 2020, 8, 134224–134232. [Google Scholar] [CrossRef]
- Ju, H. Axis-Invariant Based Multi-Axis Robot System Forward Kinematics Modeling and Solving Method. US16541147, 20 February 2020. [Google Scholar]
- Ju, H. Axis-Invariant Based Multi-Axis Robot Inverse Kinematics Modeling and Solving Method. US16541149, 20 February 2020. [Google Scholar]
- Hollerbach, J.M. A Recursive Lagrangian Formulation of Maniputator Dynamics and a Comparative Study of Dynamics Formulation Complexity. IEEE Trans. Syst. Man Cybern. 1980, 10, 730–736. [Google Scholar] [CrossRef]
- Merabet, A.; Gu, J. Robust nonlinear predictive control based on state estimation for robot manipulator. Int. J. Appl. Math Mech. 2008, 5, 48–49. [Google Scholar]
- Rojas-Moreno, A.; Valdivia-Mallqui, R. Embedded position control system of a manipulator using a robust nonlinear predictive control. In Proceedings of the International Conference on Advanced Robotics, Montevideo, Uruguay, 25–29 November 2013; pp. 1–6. [Google Scholar]




| Parameter | Symbol | Value |
|---|---|---|
| Axis-Invariant | , , , , , , | [1 0 0]T [0 1 0]T [0 0 1]T |
| Initial linear position (m) | ; ; ; ; ; ; ; | [0 0 0]T; [0 0 0]T; [−0.5 0.5 0]T; [0 0.2 0]T; [0 0.3 0]T; [0.5 0.5 0]T; [0 0.2 0]T; [0 0.3 0]T |
| Center position of the link mass (m) | ; ; ; ; ; ; ; ; | [0 0 0]T; [0 0 0]T; [0 0 0.1]T; [0 0.1 0]T; [0 0.15 0]T; [0 0.1 0]T; [0 0.1 0]T; [0 0.15 0]T; [0 0.1 0]T |
| Link mass (kg) | ; ; ; ; ; ; ; ; | 0; 0; 300; 30; 10; 5; 30; 10; 5 |
| Link MOI (kg·m2) | ; ; ; ; ; ; ; | diag(0,0,0); diag(0,0,0); diag(0.1,0.1,0.002); diag(0.03,0.006,0.03); diag(0.002,0.002,0.001); diag(0.001,0.001,0.0002); diag(0.03,0.006,0.03); diag(0.002,0.002,0.001); diag(0.001,0.001,0.0002) |
| Step size (s) | 0.001 | |
| Steps | i | 25,000 |
| Rolling period (s) | 0.1 | |
| Diagonal elements of | ;
;
; ; ; ; ; ; | 20; 10; 200; 45; 20; 10; 45; 20; 10 |
| Dynamic parameter uncertainty | ; | 1.5 ; 1.5 |
| External disturbance | d1; d2; d3; d4; d5; d6; d7; d8; d9 | 10sin(0.01i); 40sin(0.01i); 20sin(0.01i); 2sin(0.01i); 2sin(0.01i); 2sin(0.01i); 2sin(0.01i); 2sin(0.01i); 2sin(0.01i) |
| Numbers | Pseudo-Inertia Matrix Method | Generalized Momentum Method | Explicit Canonical Method | |
|---|---|---|---|---|
| Inertia matrix | Multiplication | 21n3 + 63n2 + 66n | 7n3 + 12n2 + 3n | 3.5n3 + 16n2 + 12.5n |
| Addition | 18n3 + 49.5n2 + 43.5n | 5n3 + 10n2 + 2n | 3.5n3 + 10n2 + 6.5n | |
| Bias force vector | Multiplication | 91n2 + 157n | - | 16.5n2 + 43.5n |
| Addition | 67n2 + 105n | - | 7.5n2 + 27.5n | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Z.; Ju, H.; Lu, C.; Wang, K. Dynamic Modeling and Improved Nonlinear Model Predictive Control of a Free-Floating Dual-Arm Space Robot. Appl. Sci. 2024, 14, 3333. https://doi.org/10.3390/app14083333
Guo Z, Ju H, Lu C, Wang K. Dynamic Modeling and Improved Nonlinear Model Predictive Control of a Free-Floating Dual-Arm Space Robot. Applied Sciences. 2024; 14(8):3333. https://doi.org/10.3390/app14083333
Chicago/Turabian StyleGuo, Zhenhao, Hehua Ju, Chenxin Lu, and Kaimeng Wang. 2024. "Dynamic Modeling and Improved Nonlinear Model Predictive Control of a Free-Floating Dual-Arm Space Robot" Applied Sciences 14, no. 8: 3333. https://doi.org/10.3390/app14083333