
Aiding Automated Shuttles with Their Driving Tasks as an On-Board Operator: A Case Study on Different Automated Driving Systems in Three Living Labs

Abstract
:1. Introduction
1.1. Highly Automated Shuttles
1.2. On-Board Operators and Their Human–Machine Interfaces
1.3. User-Centered Evaluation
- Work Context: What are the circumstances that the on-board operators are exposed to during their shifts on the shuttles? The focus is on ergonomic aspects of the operators’ workspaces, physical demands imposed upon them, the technical equipment they work with, and the way their work is organized.
- Acceptance: Do the on-board operators approve of the workspaces, particularly the HMIs, they work with? Acceptance is closely tied to usability and user satisfaction [12].
- System Transparency: Is the state of the system, in this case, the highly automated shuttle, immediately clear and accessible to the operators? As the automation is responsible for the execution of the driving task by default and the operator is asked to intervene occasionally only, it is crucial for the operator to be aware of the system state at any given time. When the operator is required to intervene, the reason for this need, as well as the way of interacting with the system, is supposed to be disclosed.
- Suitability of HMI Elements for Tasks: Are the HMIs the on-board operators use for fulfilling their tasks on the shuttle actually suitable for these tasks? As tasks vary between living labs, so do HMI elements (for detailed descriptions of the respective HMI setups, see the Methods section).
1.4. Related Work
1.5. Research Objectives
- How do the living labs’ human–machine interfaces (HMIs) influence factors of work context, acceptance, system transparency, and trust?
- Are the HMI elements suitable for completing these tasks?
- What recommendations for future HMI design can be derived from the observations?
2. Methods
2.1. Sample and Living Labs Overview
2.2. Research Design
2.2.1. Questionnaires
2.2.2. Semi-Structured Interview
2.2.3. Procedure
2.3. Living Labs: Operating Context, Tasks, and Human–Machine Interfaces
2.3.1. HEAT
2.3.2. RealLabHH
2.3.3. TaBuLa
3. Results
3.1. Results from Questionnaires
3.2. Results from Semi-Structured Interview
4. Discussion
4.1. Benefits and Deficits of Current On-Board Operator Workspaces
4.1.1. Workspace Design
4.1.2. Specific HMI Elements
4.2. Recommendations for Future On-Board Operator Workspace Design
4.2.1. Workspace Design
4.2.2. Specific HMI Elements
4.2.3. General Guidelines for On-Board Operator Workspace and HMI Design
- Do not overuse touch buttons and balance them with regular physical buttons.
- Only use buttons that contain feedback mechanisms to confirm to operators that their input has been noted.
- Make sure buttons have a distinct appearance and may not be activated by mistake. For example, an ‘On/Off’ button should not closely resemble an ‘Autonomous Driving’ button.
- Ensure buttons are easily visible and accessible, and not hidden behind other objects.
- Do only display information that is needed, depending on the operator’s current task. Ideally, the display is adaptive to the operator’s current informational needs.
4.3. Limitations of Study
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Society of Automotive Engineers. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; SAE: Washington, DC, USA, 2021; (SAE J 3016-202104); Available online: https://www.sae.org/standards/content/j3016_202104 (accessed on 2 July 2021).
- Iclodean, C.; Cordos, N.; Varga, B.O. Autonomous Shuttle Bus for Public Transportation: A Review. Energies 2020, 13, 2917. [Google Scholar] [CrossRef]
- Rehrmann, M.-O.; Schulz, A. Warum Hamburg Auf Tausende Autonome Shuttles Setzt. Available online: https://www.ndr.de/nachrichten/info/Warum-Hamburg-auf-Tausende-autonome-Shuttles-setzt,mobilitaetswende108.html (accessed on 15 April 2024).
- Federal Ministry for Digital and Transport. AVF-Projekte: Auswahl der Bewilligten Projekte. Available online: https://bmdv.bund.de/SiteGlobals/Forms/Listen/DE/AVF-Projekte/AVF-projekte_Formular.html?resourceId=370376&input_=370370&pageLocale=de&templateQueryString=&cl2Categories_Themen=&cl2Categories_Themen.GROUP=1&cl2Categories_Themen2=&cl2Categories_Themen2.GROUP=1&resultsPerPage=1000&resultsPerPage.GROUP=1&selectSort=commonSortDate_dt+asc&selectSort.GROUP=1 (accessed on 15 April 2024).
- Schreiber, Y. Self-Driving Car Revolution Is Coming, But Slowly. Available online: https://techxplore.com/news/2023-09-self-driving-car-revolution-slowly.html#:~:text=Pandemic-related%20disruptions%20to%20the%20car%20industry%2C%20a%20shift,it%20will%20happen%20by%202030%2C%22%20Aufrere%20told%20AFP (accessed on 15 April 2024).
- Hawkins, A.J. Driverless Cars Aren’t Going Away, But We Need to Lower Our Expectations about Them. Available online: https://www.theverge.com/2022/10/28/23427129/autonomous-vehicles-robotaxi-hype-failure-expectations (accessed on 15 April 2024).
- Kettwich, C.; Schrank, A.; Avsar, H.; Oehl, M. A Helping Human Hand: Relevant Scenarios for the Remote Operation of Highly Automated Vehicles in Public Transport. Appl. Sci. 2022, 12, 4350. [Google Scholar] [CrossRef]
- Kettwich, C.; Schrank, A. Teleoperation of Highly Automated Vehicles in Public Transport: State of the Art and Requirements for Future Remote-Operation Workstations. In Proceedings of the 27th ITS World Congress, Hamburg, Germany, 11–15 October 2021. [Google Scholar]
- Deutscher Bundestag. Gesetz zur Änderung des Straßenverkehrsgesetzes und des Pflichtversicherungsgesetzes—Gesetz zum Autonomen Fahren: StVG. Available online: https://www.bgbl.de/xaver/bgbl/start.xav?startbk=Bundesanzeiger_BGBl&start=//*[@attr_id=%27bgbl121s3108.pdf%27]#__bgbl__%2F%2F*%5B%40attr_id%3D%27bgbl121s3108.pdf%27%5D__1649730045177 (accessed on 15 April 2024).
- Schrank, A.; Kettwich, C.; Heß, S.; Oehl, M. Supervising Highly Automated Shuttles: A Case Study of On-Board Operators’ Workplaces across Three Real-World Laboratories. In Proceedings of the Human Factors and Ergonomics Society Europe Chapter Annual Meeting—HFES Europe 2022, Torino, Italy, 20–22 April 2022. [Google Scholar]
- No. 9241-110:2020; Ergonomics of Human-System Interaction—Part 110: Interaction Principles. International Organization for Standardization: Geneva, Switzerland, 2020.
- van der Laan, J.; Heino, A.; de Waard, D. A Simple Procedure for the Assessment of Acceptance of Advanced Transport Telematics. Transp. Res. Part C Emerg. Technol. 1997, 5, 1–10. [Google Scholar] [CrossRef]
- Kaur, K.; Rampersad, G. Trust in driverless cars: Investigating key factors influencing the adoption of driverless cars. J. Eng. Technol. Manag. 2018, 48, 87–96. [Google Scholar] [CrossRef]
- Acemyan, C.Z.; Kortum, P. The Relationship Between Trust and Usability in Systems. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Boston, MA, USA, 22–26 October 2012; Volume 56, pp. 1842–1846. [Google Scholar] [CrossRef]
- Pikner, H.; Sell, R.; Majak, J.; Karjust, K. Safety System Assessment Case Study of Automated Vehicle Shuttle. Electronics 2022, 11, 1162. [Google Scholar] [CrossRef]
- Stocker, A.; Shaheen, S. Shared Automated Vehicles: Review of Business Models; International Transport Forum Discussion Paper No. 2017-09; Organisation for Economic Co-Operation and Development (OECD): Paris, France, 2017. [Google Scholar]
- Nordhoff, S.; de Winter, J.; Madigan, R.; Merat, N.; van Arem, B.; Happee, R. User acceptance of automated shuttles in Berlin-Schöneberg: A questionnaire study. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 843–854. [Google Scholar] [CrossRef]
- Bellet, T.; Banet, A. UTAUT4-AV: An extension of the UTAUT model to study intention to use automated shuttles and the societal acceptance of different types of automated vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2023, 99, 239–261. [Google Scholar] [CrossRef]
- Paddeu, D.; Parkhurst, G.; Shergold, I. Passenger comfort and trust on first-time use of a shared autonomous shuttle vehicle. Transp. Res. Part C Emerg. Technol. 2020, 115, 102604. [Google Scholar] [CrossRef]
- Nordhoff, S.; Stapel, J.; van Arem, B.; Happee, R. Passenger opinions of the perceived safety and interaction with automated shuttles: A test ride study with ‘hidden’ safety steward. Transp. Res. Part A Policy Pract. 2020, 138, 508–524. [Google Scholar] [CrossRef]
- Schuß, M.; Rollwagen, A.; Riener, A. Understanding Operator Influence in Automated Urban Shuttle Buses and Recommendations for Future Development. MTI 2022, 6, 109. [Google Scholar] [CrossRef]
- Schrank, A.; Kettwich, C.; Heß, S.; Oehl, M. Highly automated yet highly controlled: A case study of HAVs’ on-board operators’ workplaces across three real-world laboratories. In Proceedings of the 64th Conference of Experimental Psychologists (TeaP), Online, 20–23 March 2022. [Google Scholar]
- Hamburger Hochbahn. The Future Is Driverless: Be Part of the HOCHBAHN Research and Development Project HEAT. Available online: https://www.hochbahn.de/hochbahn/hamburg/en/home/projects/expansion_and_projects/project_heat (accessed on 29 June 2021).
- RealLab Hamburg. Autonomes Fahren. Available online: https://reallab-hamburg.de/projekte/autonomes-fahren/ (accessed on 25 March 2021).
- TU Hamburg. TaBuLa: Aufbau Eines Testzentrums für Automatisiert Verkehrende Busse im Kreis Herzogtum Lauenburg. Available online: https://www.tabulashuttle.de/ (accessed on 15 February 2023).
- Verband Deutscher Verkehrsunternehmen. Autonome Shuttle-Bus-Projekte in Deutschland. Available online: https://www.vdv.de/liste-autonome-shuttle-bus-projekte.aspx (accessed on 26 March 2024).
- Denzin, N.K. Sociological Methods: A Sourcebook; Taylor and Francis: Halse Maltings, UK, 2006; ISBN 978-0-202-30840-1. [Google Scholar]
- Morgeson, F.P.; Humphrey, S.E. The Work Design Questionnaire (WDQ): Developing and validating a comprehensive measure for assessing job design and the nature of work. J. Appl. Psychol. 2006, 91, 1321–1339. [Google Scholar] [CrossRef] [PubMed]
- Morgeson, F.P.; Campion, M.A. Work Design. In Handbook of Psychology; Weiner, I.B., Ed.; Wiley: Hoboken, NJ, USA, 2003; pp. 423–452. ISBN 9780471176695. [Google Scholar]
- Cramer, H.; Evers, V.; Ramlal, S.; van Someren, M.; Rutledge, L.; Stash, N.; Aroyo, L.; Wielinga, B. The effects of transparency on trust in and acceptance of a content-based art recommender. User Model. User-Adapt. Interact. 2008, 18, 455–496. [Google Scholar] [CrossRef]
- Gertz, C.; Maaß, J.B.; Grote, M.; Diebold, T.; Mantel, R.; Röntgen, O.; Stargardt, J.; Werner, L.; Wolf, J. Endbericht des Projektes TaBuLa; Universitätsbibliothek der Technischen Universität Hamburg-Harburg: Hamburg, Germany, 2021. [Google Scholar]
- Zijlstra, F.R.H. Efficiency in Work Behavior; Delft University Press: Delft, The Netherlands, 1993. [Google Scholar]
- EasyMile. EZ10 Passenger Shuttle. Available online: https://easymile.com/vehicle-solutions/ez10-passenger-shuttle (accessed on 26 March 2024).
- Navya. Autonom Shuttle. Available online: https://navya.tech/wp-content/uploads/documents/Brochure_Shuttle_EN.pdf (accessed on 26 March 2024).
- Landis, J.R.; Koch, G.G. The measurement of observer agreement for categorical data. Biometrics 1977, 33, 159–174. [Google Scholar] [CrossRef] [PubMed]
- ISO 6385:2016; Ergonomics Principles in the Design of Work Systems. ISO: Geneva, Switzerland, 2016. Available online: https://www.iso.org/standard/63785.html (accessed on 15 April 2024).
- ISO 9421-210:2019; Ergonomics of Human-System Interaction—Part 210: Human-Centered Design for Interactive Systems. ISO: Geneva, Switzerland, 2019.
- Bundesanstalt für Arbeitsschutz und Arbeitsmedizin. Bildschirmarbeit in Leitwarten Ergonomisch Gestalten; Bundesanstalt für Arbeitsschutz und Arbeitsmedizin: Berlin, Germany, 2014; ISBN 978-3-88261-016-1. [Google Scholar]
- Nordhoff, S.; de Winter, J.; Payre, W.; van Arem, B.; Happee, R. What impressions do users have after a ride in an automated shuttle? An interview study. Transp. Res. Part F Traffic Psychol. Behav. 2019, 63, 252–269. [Google Scholar] [CrossRef]
- Zhu, Y.; Geng, Y.; Huang, R.; Zhang, X.; Wang, L.; Liu, W. Driving Towards the Future: Exploring Human-Centered Design and Experiment of Glazing Projection Display Systems for Autonomous Vehicles. Int. J. Hum.-Comput. Interact. 2023, 1–16. [Google Scholar] [CrossRef]
- Kettwich, C.; Schrank, A.; Oehl, M. Teleoperation of Highly Automated Vehicles in Public Transport: User-Centered Design of a Human-Machine Interface for Remote-Operation and Its Expert Usability Evaluation. MTI 2021, 5, 26. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Laboratory | HEAT | RealLabHH | TaBuLa | |||
|---|---|---|---|---|---|---|
| M | SD | M | SD | M | SD | |
| Work Experience (Months) 1 | 8.33 | 3.21 | 6.00 | 0.00 | 29.33 | 9.24 |
| Age (Years) 2 | 29.00 | 6.24 | 44.33 | 6.81 | 49.67 | 5.77 |
| Subscales | Items | Derived Definition 1 |
|---|---|---|
| Ergonomics |
| Extent to which the working environment allows for correct and appropriate posture and movement. |
| Physical Demands |
| Level of physical activity and exertion required at work. |
| Equipment Use |
| Variety and complexity of tools and technical equipment used at work. |
| Work Conditions |
| Physical environment in which work is performed including explicit health risks, heat, noise, and hygienic conditions. |
| Laboratory | Location | Period of Vehicle Operation | OEM 1 of Shuttle | Type of Schedule/Route | Driving Environment | Typical Interventions by the On-Board Operator |
|---|---|---|---|---|---|---|
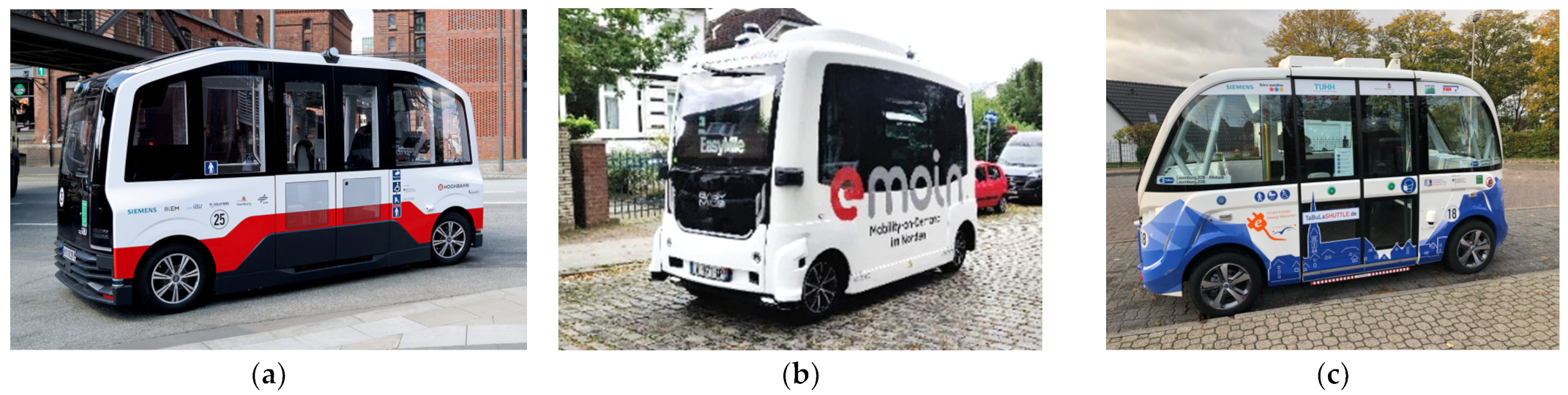
| HEAT [23] | Hamburg Hafencity (urban) | October 2020– December 2021 | IAV, Berlin, Germany | Fixed schedule/ fixed route. | New urban district, mixed use (residential, business, and culture), high number of pedestrians and cyclists, including tourists. |
|
| RealLabHH [24] | Hamburg Bergedorf (suburban) | July 2020–December 2021 | EasyMile, Toulouse, France | On-demand schedule/ flexible route. | Residential neighborhood, narrow streets (often one-way) with cobble stone pavement, thick greenery. |
|
| TaBuLa [31] | Lauenburg (small town) | October 2019– November 2021 | Navya, Villeurbanne, France | Fixed schedule/ fixed route. | Old town with narrow streets, cobble stone pavement, steep inclines, sharp turns. |
|
| Laboratory | Mental Effort 1 | No. of Rides (Events) | Ride Duration 2 [min] | Duration in Auto. Mode 3 [%] | Duration in Man. Mode 3 [%] | Rated Criticality for Safety 4 | Time-Critical Events [%] | Manual Interventions per h |
|---|---|---|---|---|---|---|---|---|
| HEAT | 79.41 | 17 (101) | M = 18.12 (SD = 14.02) | 51.06 | 17.78 | M = 1.60 (SD = 0.92) | 10.00 | 6.43 |
| RealLabHH | 55.00 | 11 (146) | M = 18.91 (SD = 10.61) | 61.42 | 6.37 | M = 1.93 (SD = 1.04) | 15.17 | 30.00 |
| TaBuLa | 55.00 | 4 (43) | M = 23.75 (SD = 2.49) | 80.53 | 12.37 | M = 1.65 (SD = 0.69) | 6.98 | 22.74 |
| Laboratory | HEAT | RealLabHH | TaBuLa | |||
|---|---|---|---|---|---|---|
| Scale | M | SD | M | SD | M | SD |
| Overall | 2.15 | 0.65 | 3.19 | 0.96 | 3.07 | 1.36 |
| Ergonomics | 1.44 | 0.47 | 1.67 | 0.94 | 2.78 | 1.53 |
| Physical Demands | 1.78 | 0.90 | 3.44 | 1.15 | 3.11 | 1.61 |
| Equipment Use | 3.22 | 0.59 | 4.44 | 0.79 | 3.33 | 0.94 |
| Laboratory | HEAT | RealLabHH | TaBuLa | |||
|---|---|---|---|---|---|---|
| Scale | M | SD | M | SD | M | SD |
| Overall | 0.17 | 0.42 | 0.13 | 0.56 | 0.89 | 0.80 |
| Usefulness | 0.67 | 0.52 | 0.27 | 0.54 | 1.2 | 0.75 |
| Satisfaction | −0.33 | 0.32 | 0 | 0.59 | 0.58 | 0.85 |
| Laboratory | HEAT | RealLabHH | TaBuLa | |||
|---|---|---|---|---|---|---|
| Scale | M | SD | M | SD | M | SD |
| System Transparency | 1.73 | 0.87 | 2.33 | 0.73 | 4.60 | 0.57 |
| Trust | 2.69 | 1.02 | 2.63 | 0.69 | 4.17 | 0.46 |
| Laboratory | HMI Component 3 | Input 1 | Output 2 | M | SD |
|---|---|---|---|---|---|
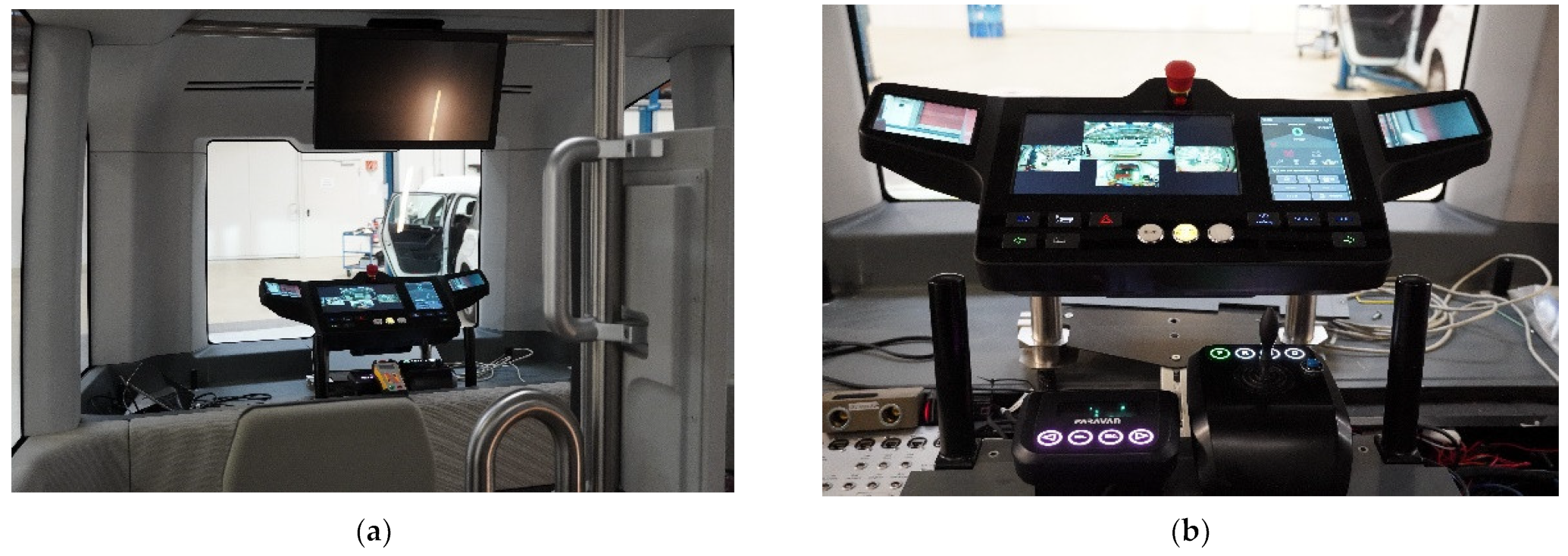
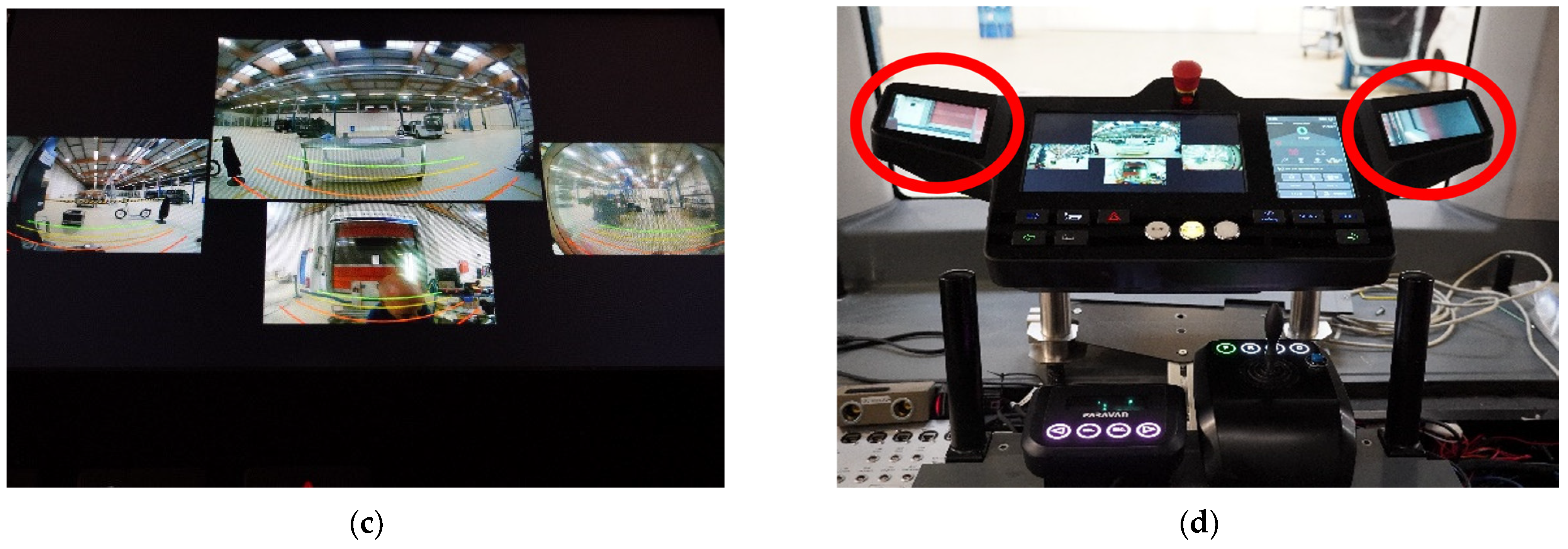
| HEAT | Central operating station. | X | 4.00 | 0.82 | |
| Central screen for video stream. | X | 3.00 | 0.82 | ||
| Peripheral screens for side mirror cameras. | X | 4.00 | 0.82 | ||
| RealLabHH | Screen that displays the immediate surroundings using sensor data. | X | 2.67 | 0.94 | |
| Screen that displays the surroundings over a large area using sensor data. | X | 2.67 | 1.70 | ||
| Central screen showing the shuttle’s location accuracy (GPS) and the current route (green line). | X | 3.67 | 1.25 | ||
| Key to switch between manual and automated mode. | X | 3.67 | 0.94 | ||
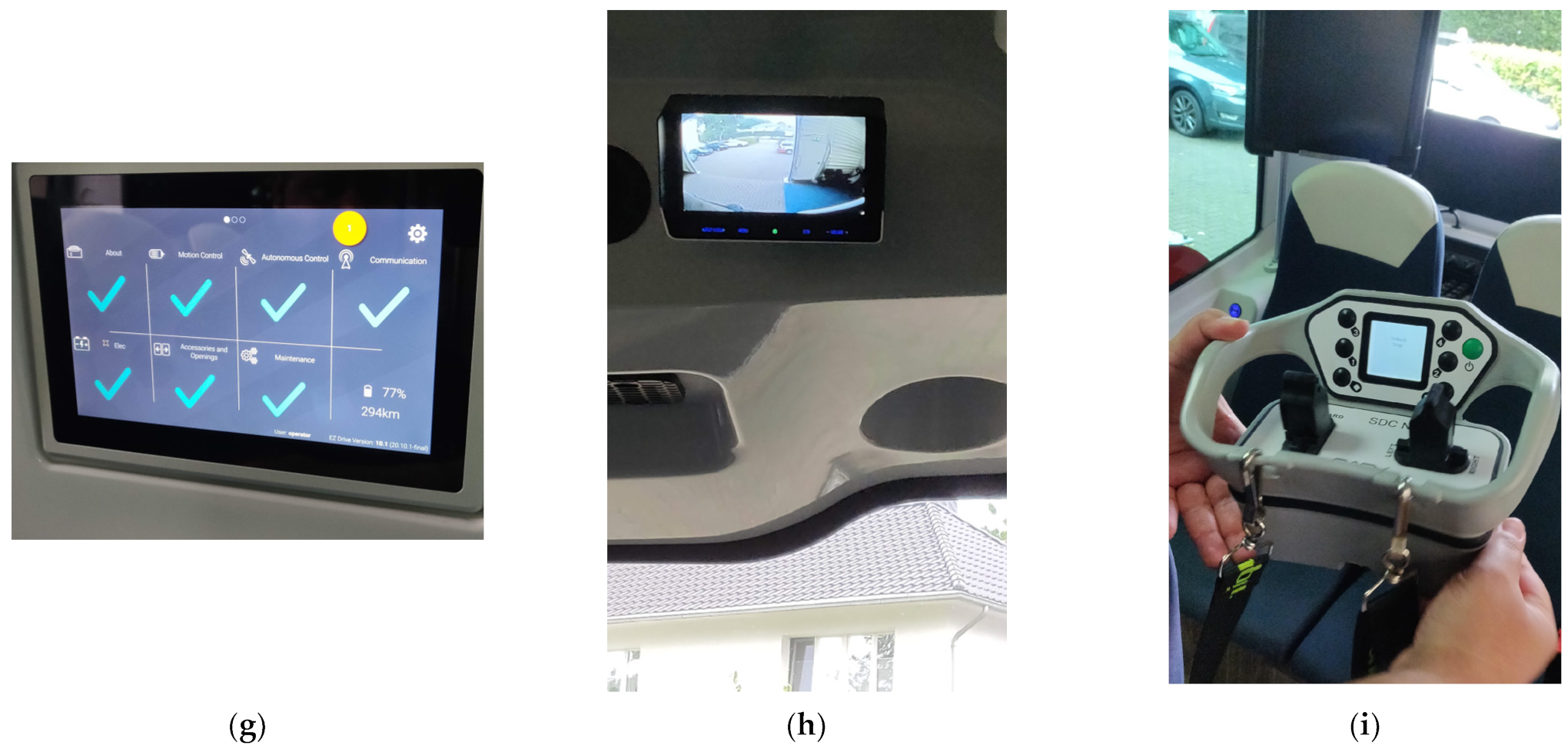
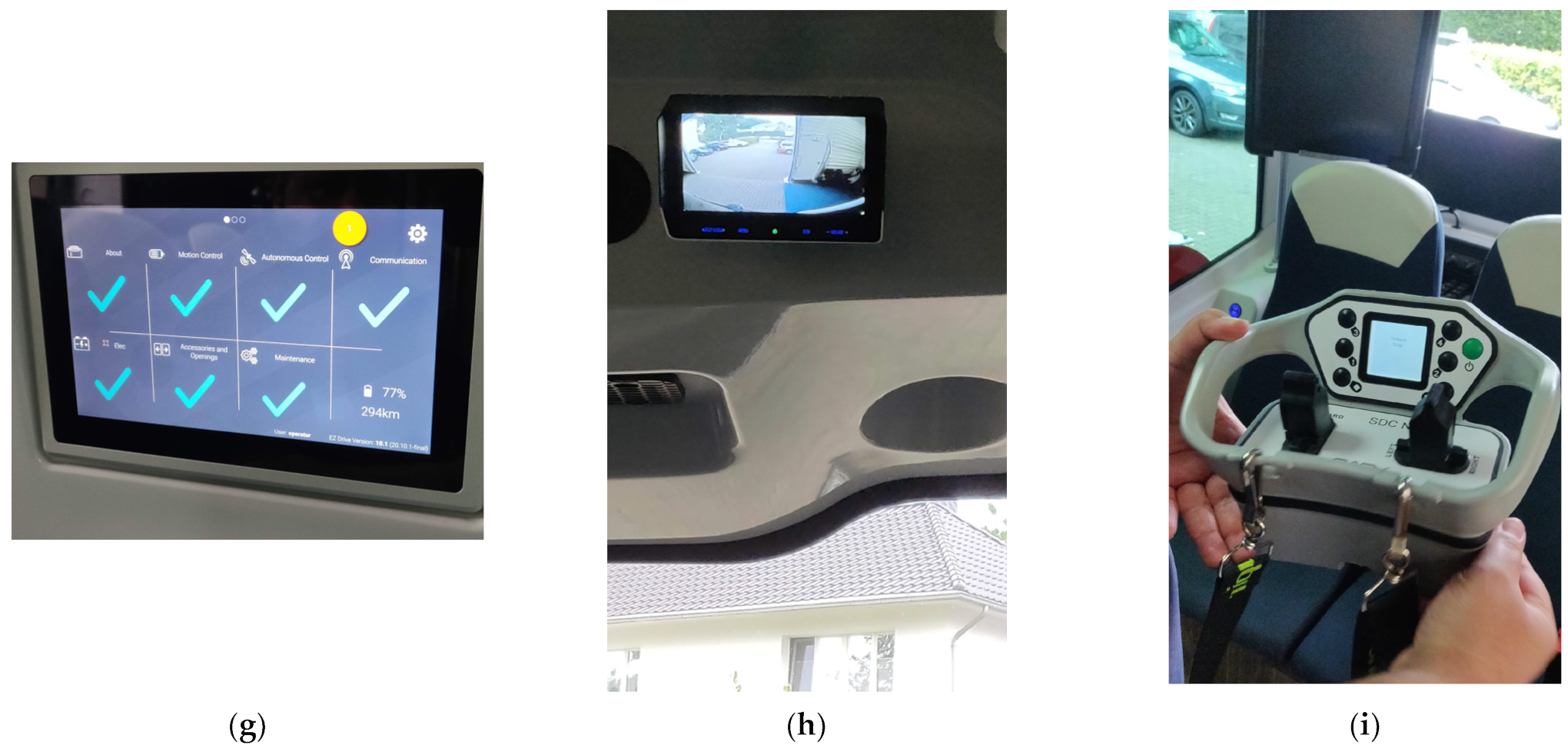
| Information about trips. | X | X | 2.00 | 1.41 | |
| Touch display to make or view vehicle settings (lights, air conditioning, etc.). | X | X | 3.33 | 1.25 | |
| Wide-angle camera for viewing area directly in front of the shuttle. | X | 4.00 | 0.00 | ||
| Joystick for direct control of the vehicle. | X | 3.00 | 0.00 | ||
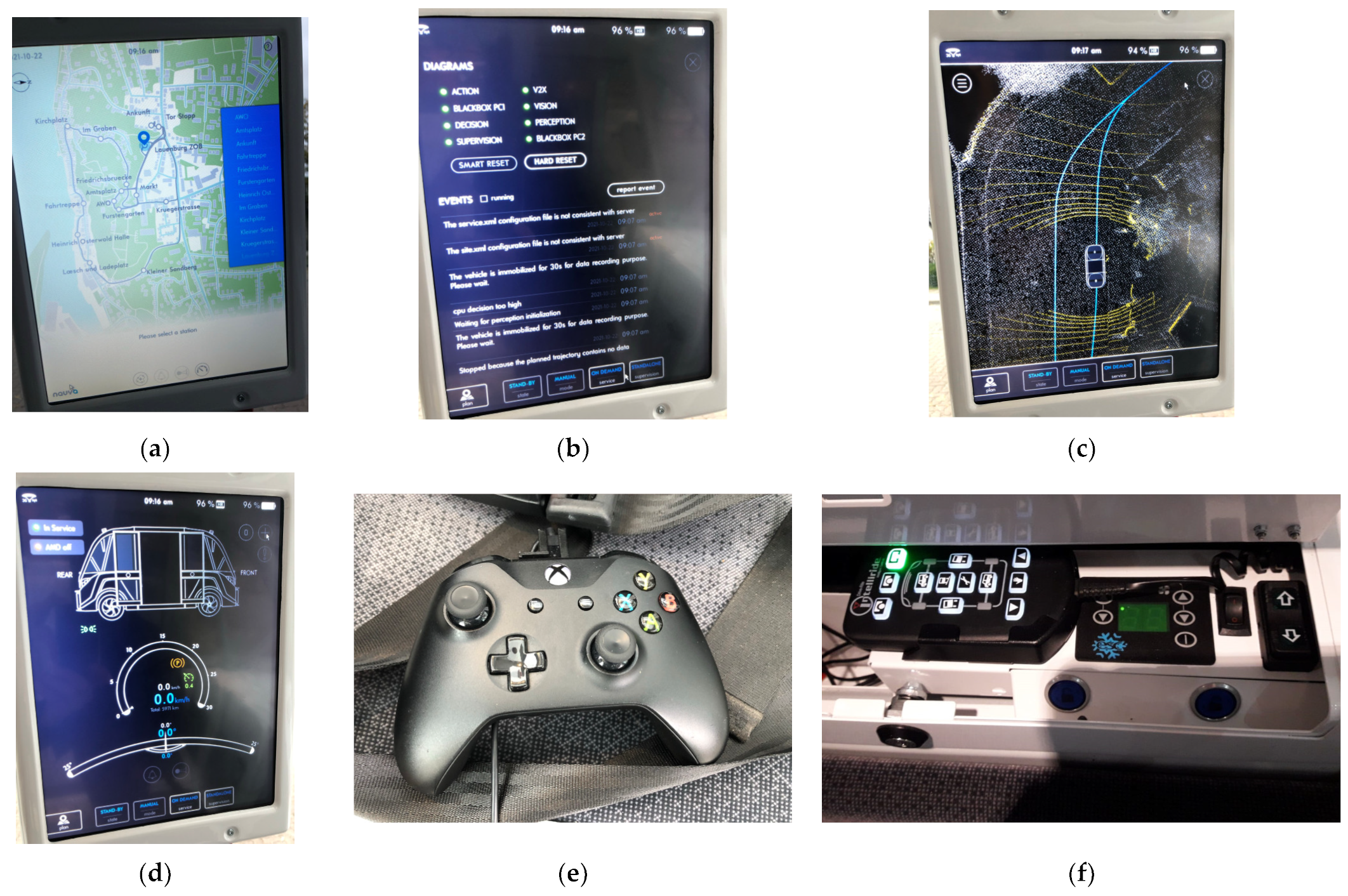
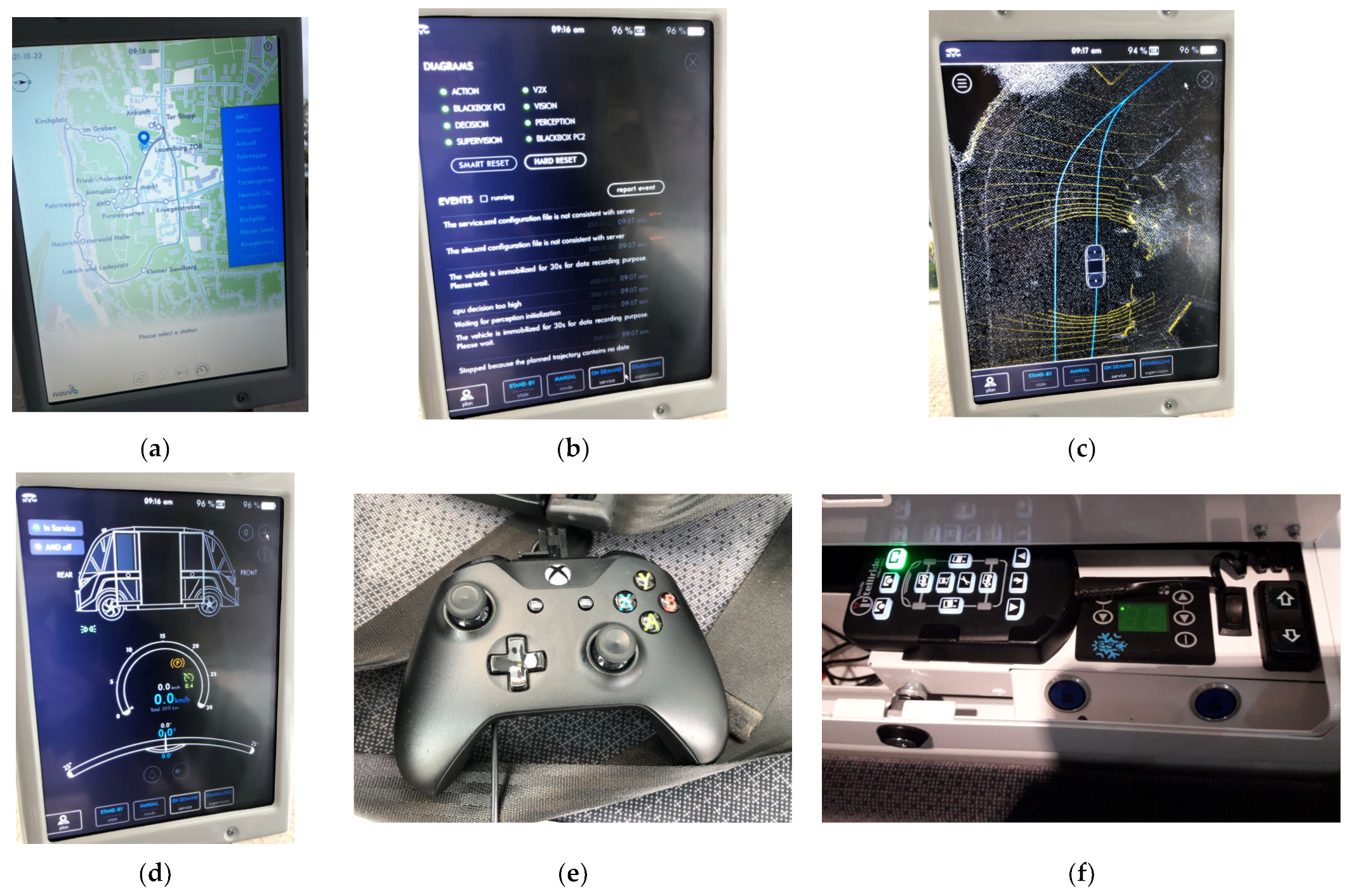
| TaBuLa | Main screen, consisting of the following: | ||||
| (a) Map. | X | 5 | 0 | ||
| (b) Control display for diagrams, events, errors. | X | 5 | 0 | ||
| (c) Sensor and trajectory display. | X | 5 | 0 | ||
| (d) Display of speed and vehicle status. | X | 5 | 0 | ||
| Xbox controller for controlling shuttle. | X | 5 | 0 | ||
| Control elements on black box (left in the picture 3). | X | 3 | 2 | ||
| Operating elements around the small LCD display on the white box (right in the picture 3). | X | 5 | 0 |
| Subscale 1 | Laboratory | Examples from Responses (Paraphrased) | + 2 | o 2 | − 2 | Total |
|---|---|---|---|---|---|---|
| Ergonomics | HEAT |
| 0 | 0 | 8 | 8 |
| RealLabHH |
| 1 | 0 | 16 | 17 | |
| TaBuLa |
| 0 | 0 | 16 | 16 | |
| Sum | 1 | 0 | 40 | 41 | ||
| Physical Demands | HEAT | (None) | 0 | 0 | 0 | 0 |
| RealLabHH |
| 0 | 0 | 3 | 3 | |
| TaBuLa |
| 0 | 0 | 1 | 1 | |
| Sum | 0 | 0 | 4 | 4 | ||
| Equipment Use | HEAT |
| 3 | 1 | 1 | 5 |
| RealLabHH |
| 2 | 0 | 0 | 2 | |
| TaBuLa |
| 0 | 3 | 5 | 8 | |
| Sum | 5 | 4 | 6 | 15 | ||
| Work Conditions | HEAT |
| 2 | 3 | 6 | 11 |
| RealLabHH |
| 1 | 0 | 8 | 9 | |
| TaBuLa |
| 4 | 2 | 1 | 7 | |
| Sum | 7 | 5 | 15 | 27 | ||
| Sum Overall | 13 | 9 | 65 | 87 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schrank, A.; Kettwich, C.; Oehl, M. Aiding Automated Shuttles with Their Driving Tasks as an On-Board Operator: A Case Study on Different Automated Driving Systems in Three Living Labs. Appl. Sci. 2024, 14, 3336. https://doi.org/10.3390/app14083336
Schrank A, Kettwich C, Oehl M. Aiding Automated Shuttles with Their Driving Tasks as an On-Board Operator: A Case Study on Different Automated Driving Systems in Three Living Labs. Applied Sciences. 2024; 14(8):3336. https://doi.org/10.3390/app14083336
Chicago/Turabian StyleSchrank, Andreas, Carmen Kettwich, and Michael Oehl. 2024. "Aiding Automated Shuttles with Their Driving Tasks as an On-Board Operator: A Case Study on Different Automated Driving Systems in Three Living Labs" Applied Sciences 14, no. 8: 3336. https://doi.org/10.3390/app14083336