
Bounding Volume Hierarchy-Assisted Fast SAR Image Simulation Based on Spatial Segmentation

Abstract
1. Introduction
- (1)
- A novel EM wave transmission simulation method based on RD imaging geometry relation is designed. The method utilizes the scanning mode of SAR spatial traversal and the BVH algorithm to assist in the generation of the latticed radiation area and EM wave transmission simulations, considering the time-varying characteristics of the latticed radiation area and shadow area.
- (2)
- A novel fast SAR image simulation method based on spatial segmentation is proposed. The method integrates the idea of spatial segmentation into the echo matrix cell method based on the CUDA platform, including the time-varying characteristics of the target backscatter coefficient and multiple scattering. It is applicable to distributed composite scenes.
2. BVH-Assisted Computation of the Target Multiple Backscatter Field
2.1. BVH-Assisted Simulation of Electromagnetic Wave Transmission
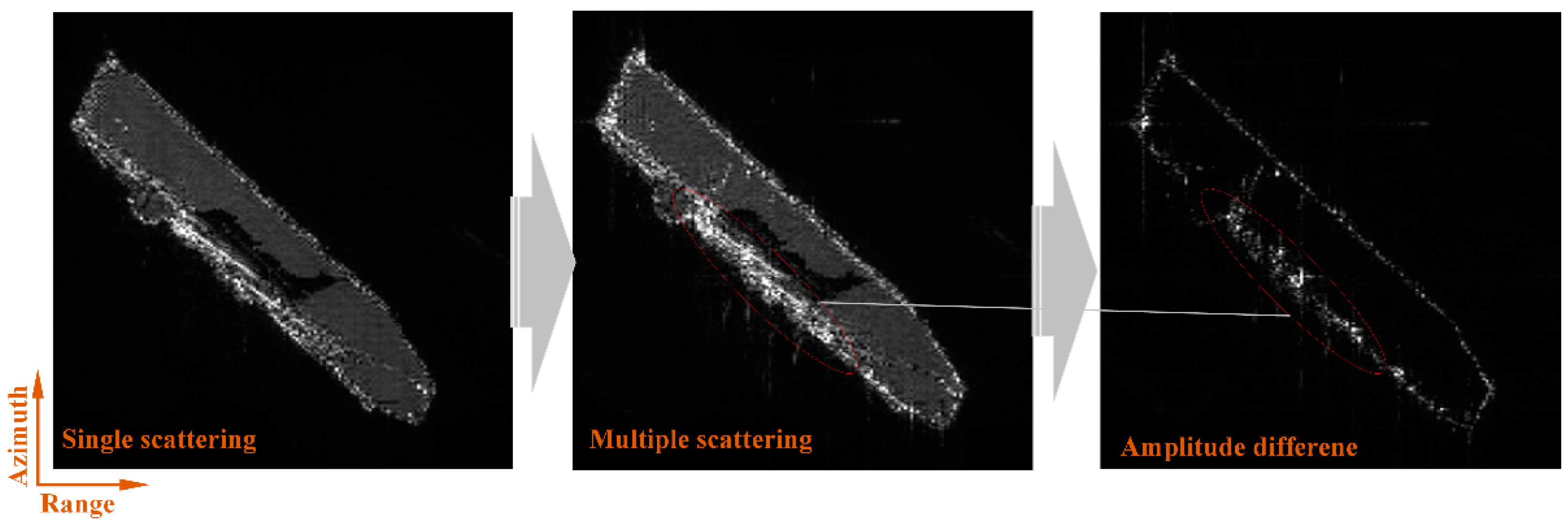
2.2. Calculation of the Multiple Backscatter Field
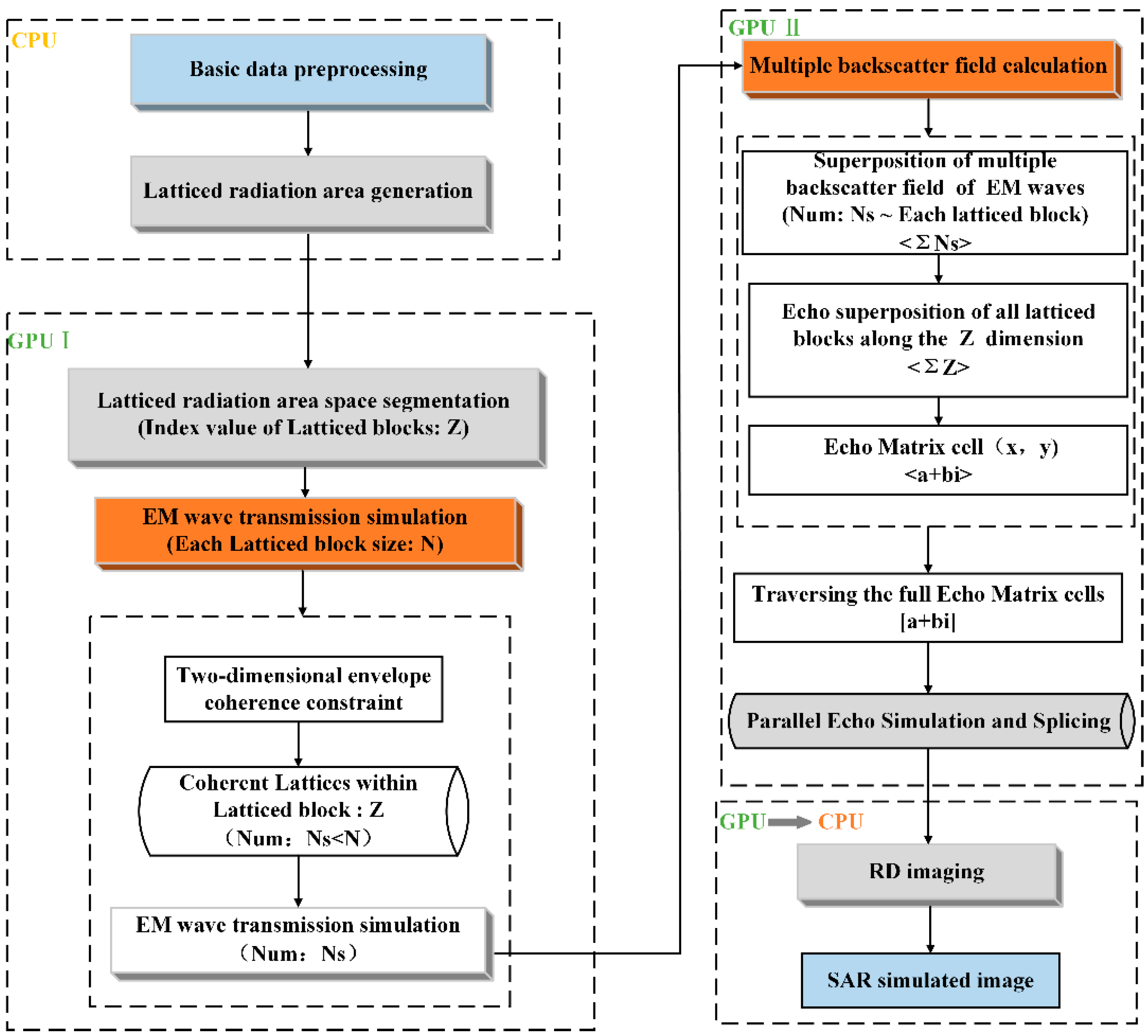
3. Fast SAR Image Simulation Based on Spatial Segmentation
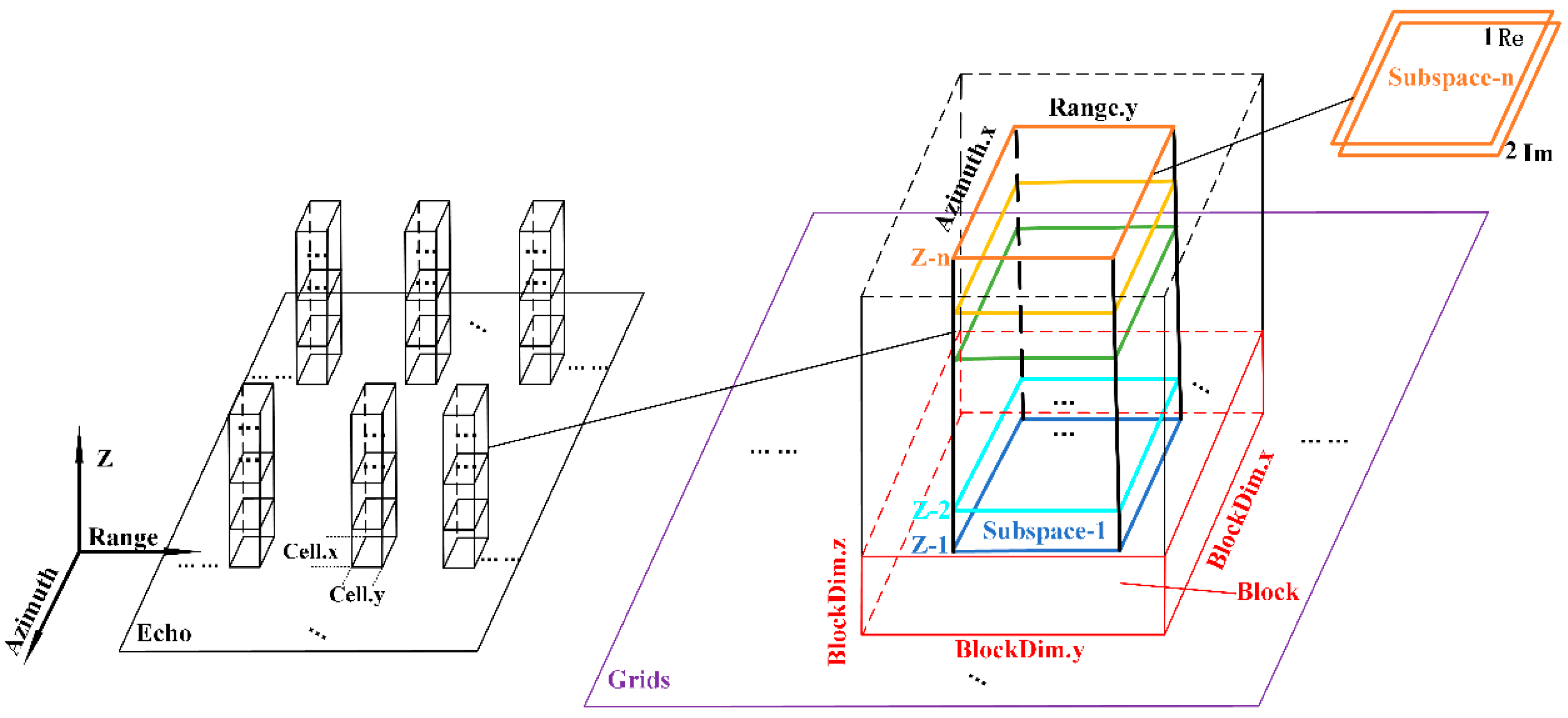
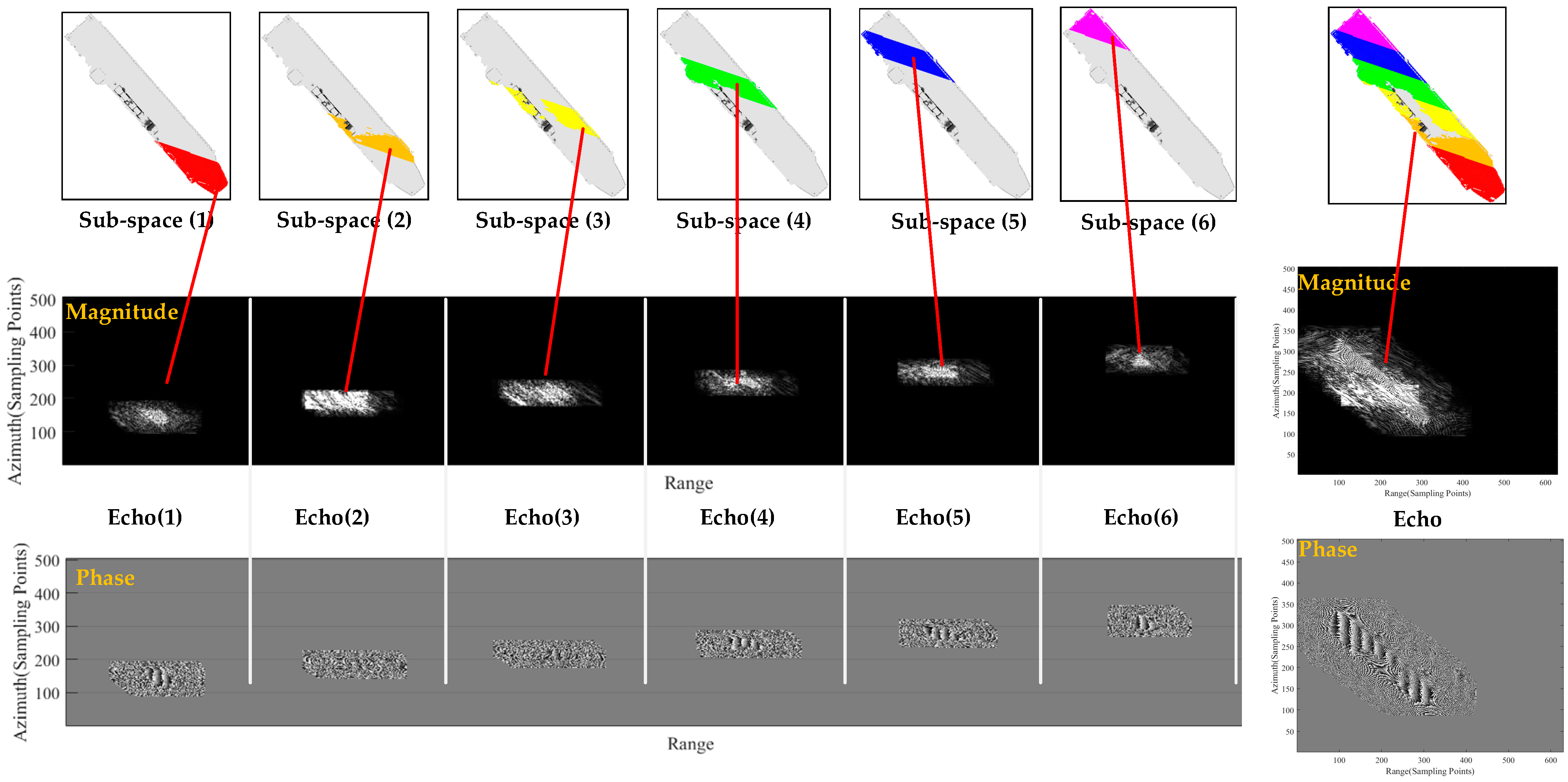
3.1. CUDA Thread Organization Based on Spatial Segmentation
3.2. SAR Echo Generating and Imaging
- (1)
- Based on the current position of the echo matrix cell , the sampling moments along the azimuthal and range directions can be locked, as determined by the divided azimuthal and range directions of the time axis;
- (2)
- Each thread directly deals with the EM waves transmitted by each latticed block. The azimuthal and range envelope constraints on the echo matrix cell are used to select the coherent lattices in the current latticed block . Then, the discrete EM waves for the coherent lattice target are transmitted. Multiple scattering path tracking of the transmitted EM waves is carried out, and the EM waves correspond to the coherent lattices in turn. Using the multiple backscatter field calculation method in Section 2.2, the backscatter coefficient amplitude of the EM wave corresponds to the coherent lattices, and is obtained; at the same time, the corresponding phase information is obtained from the real-time slant range of . By multiplying the amplitude by the sine or cosine of the phase , the real part and the imaginary part of the corresponding echo signal can be obtained, respectively; the echo emulation signals for each latticed block are recorded as follows: .
- (3)
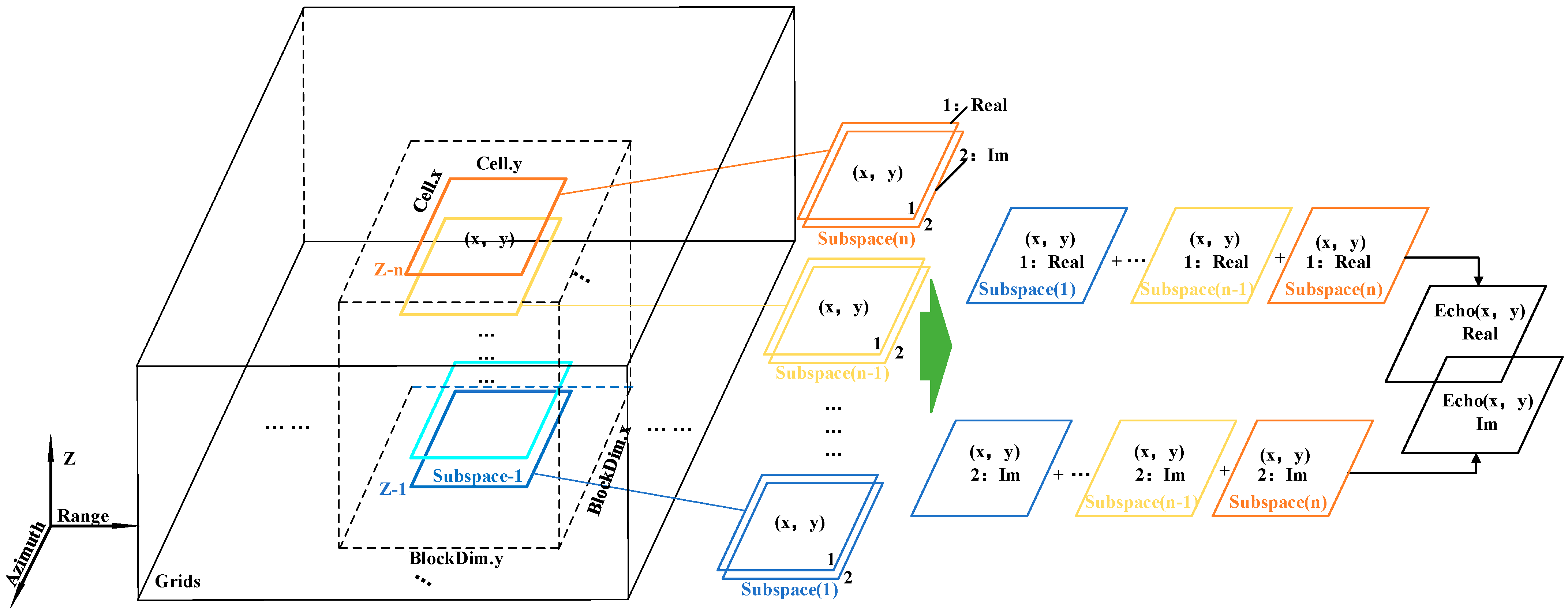
- By superimposing the echo matrix cell corresponding to the echo of the latticed blocks along the longitudinal dimension of the grid, the echo matrix cell can be denoted as ;
- (4)
- Each thread executes steps (2) to (3) independently. Traversing the positions of all the cells of the target echo matrix in parallel can quickly complete the echo simulation task. The raw echo matrix is obtained and stored as complex numbers ;
- (5)
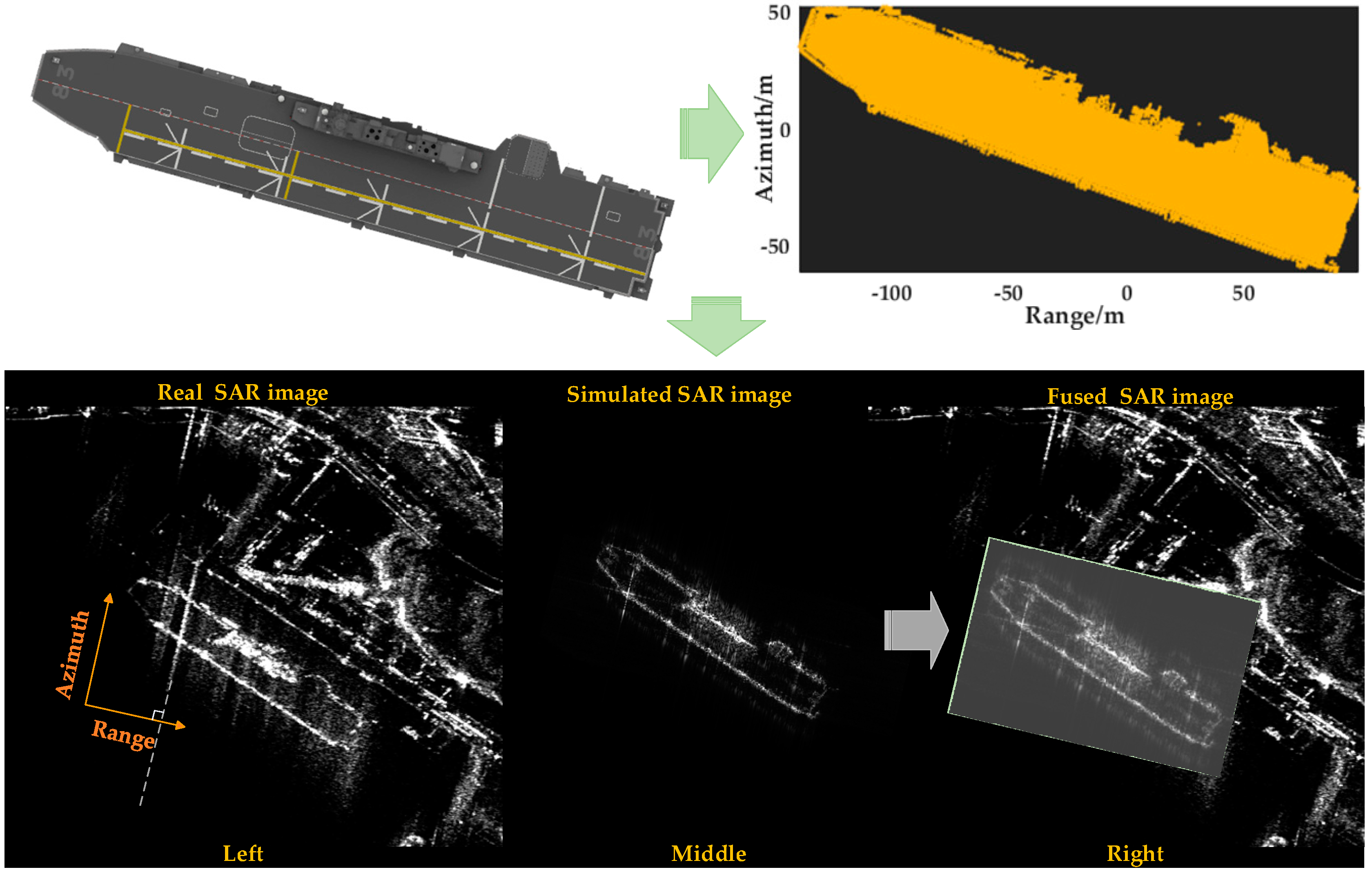
- Finally, the raw echo matrix is downloaded from the GPU to the CPU. The RD imaging algorithm is used to focus the simulated echo matrix in two dimensions to obtain the simulated SAR image of the target, and the process of SAR echo imaging can be equated to the two-dimensional deconvolution process of reconstructing the backscatter coefficient of the target.
4. Discussion of Simulation Results
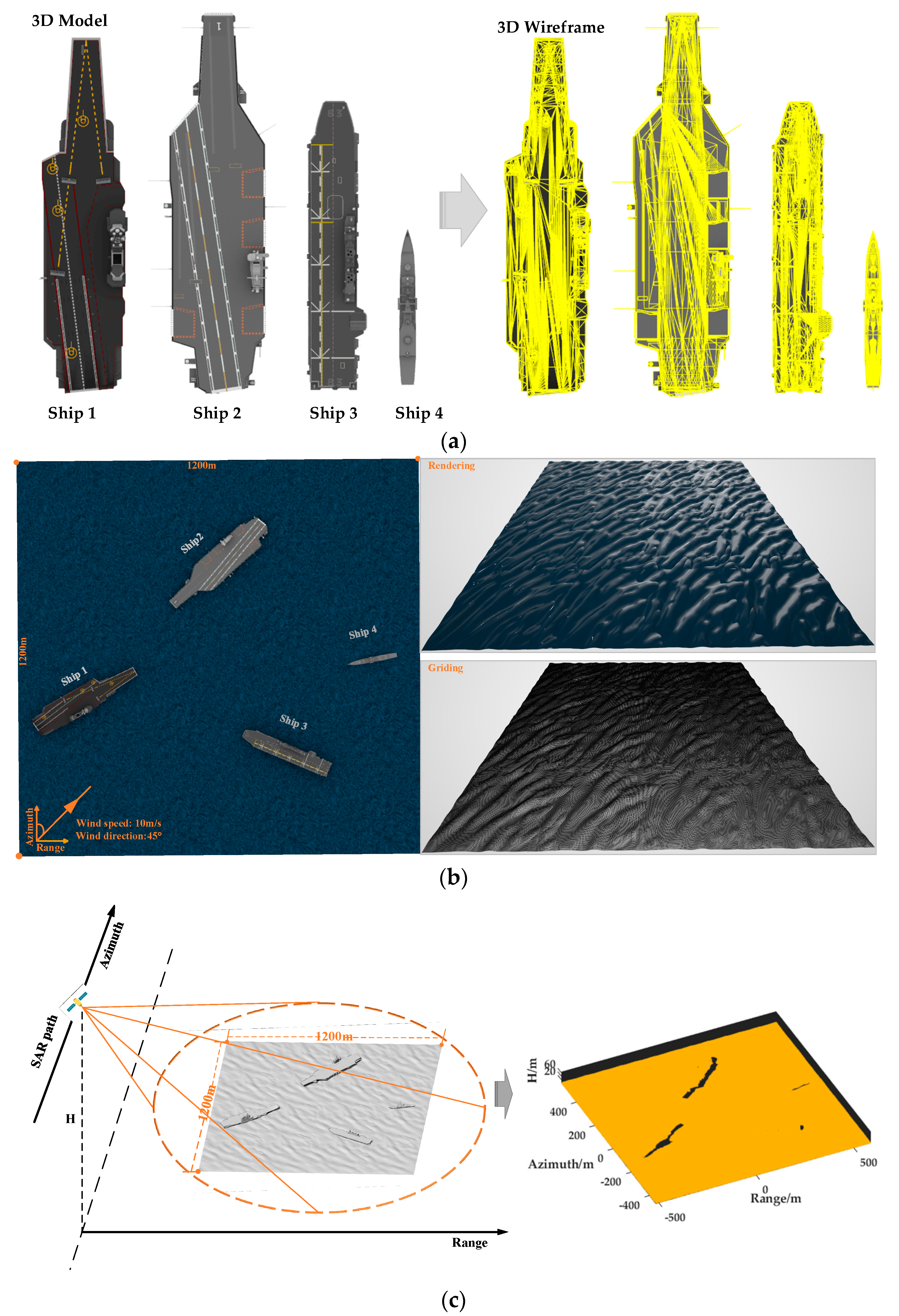
4.1. Test Parameters
4.2. Analysis of Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Holtzman, J.C.; Frost, V.S.; Abbott, J.L.; Kaupp, V.H. Radar image simulation. IEEE Trans. Geosci. Electron. 1978, 16, 296–303. [Google Scholar] [CrossRef]
- Chen, K.S. Principles of Synthetic Aperture Radar Imaging: A System Simulation Approach; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Brown, W.M. Synthetic aperture radar. IEEE Trans. Aerosp. Electron. Syst. 1967, 2, 217–229. [Google Scholar] [CrossRef]
- Auer, S.; Hinz, S.; Bamler, R. Ray Tracing for Simulating Reflection Phenomena in SAR Images. In Proceedings of the Geoscience and Remote Sensing Symposium, 2008 IEEE International-IGARSS, Boston, MA, USA, 6–11 July 2008. [Google Scholar]
- Auer, S.; Hinz, S.; Bamler, R. Ray-tracing simulation techniques for understanding high-resolution SAR images. IEEE Trans. Geosci. Remote Sens. 2009, 48, 1445–1456. [Google Scholar] [CrossRef]
- Auer, S.; Bamler, R.; Reinartz, P. RaySAR-3D SAR simulator: Now open source. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016. [Google Scholar]
- Franceschetti, G.; Iodice, A.; Riccio, D.; Ruello, G. SAR raw signal simulation for urban structures. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1986–1995. [Google Scholar] [CrossRef]
- Franceschetti, G.; Iodice, A.; Riccio, D.; Ruello, G. Efficient simulation of hybrid stripmap/spotlight SAR raw signals from extended scenes. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2385–2396. [Google Scholar] [CrossRef]
- Franceschetti, G.; Guida, R.; Iodice, A.; Riccio, D.; Ruello, G.; Stilla, U. Simulation Tools for Interpretation of High Resolution SAR Images of Urban Areas. In Proceedings of the IEEE Urban Remote Sensing Joint Event, Paris, France, 11–13 April 2007. [Google Scholar]
- Liu, T.; Wang, K.; Liu, X. SAR simulation for large scenes by ray tracing technique based on GPU. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium-IGARSS, Melbourne, VIC, Australia, 21–26 July 2013; pp. 1131–1134. [Google Scholar]
- Xia, W.; Wei, X. SAR image simulation and verification for urban structure. Int. J. Electron. 2016, 103, 247–260. [Google Scholar] [CrossRef]
- Dong, C.; Guo, L.; Meng, X. An Accelerated Algorithm Based on GO-PO/PTD and CWMFSM for EM Scattering from the Ship over a Sea Surface and SAR Image Formation. IEEE Trans. Antennas Propag. 2020, 68, 3934–3944. [Google Scholar] [CrossRef]
- Drozdowicz, J. The Open-Source Framework for 3D Synthetic Aperture Radar Simulation. IEEE Access 2021, 9, 39518–39529. [Google Scholar] [CrossRef]
- Chiang, C.; Chen, K.; Yang, Y. SAR Image Simulation of Complex Target including Multiple Scattering. Remote Sens. 2021, 13, 4854. [Google Scholar] [CrossRef]
- Wu, K.; Jin, G.; Xiong, X.; Zhang, H.; Wang, L. SAR Image Simulation Based on Effective View and Ray Tracing. Remote Sens. 2022, 14, 5754. [Google Scholar] [CrossRef]
- Wu, K.; Jin, G.; Xiong, X.; Zhang, H.; Wang, L. Fast SAR Image Simulation Based on Echo Matrix Cell Algorithm Including Multiple Scattering. Remote Sens. 2023, 15, 3637. [Google Scholar] [CrossRef]
- Balz, T.; Stilla, U. Hybrid GPU-based single-and double-bounce SAR simulation. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3519–3529. [Google Scholar] [CrossRef]
- Zhang, F.; Wang, B.; Xiang, M. Accelerating InSAR raw data simulation on GPU using CUDA. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010. [Google Scholar]
- Zhu, H.; Xu, H.; Feng, L. Application of GPU for missile-borne SAR raw signal simulation. In Proceedings of the International Conference on Artificial Intelligence, Management Science and Electronic Commerce (AIMSEC), Zhengzhou, China, 8–10 August 2011. [Google Scholar]
- Chen, H.; Huang, Y.; Yang, J. Airborne bistatic SAR echo simulator based on Multi-GPU platform. In Proceedings of the 2011 IEEE CIE International Conference on Radar, Chengdu, China, 24–27 October 2011; pp. 1–5. [Google Scholar]
- Sheng, H.; Zhou, M.; Wang, K.; Liu, X. SAR echo simulation from numerous scattering cells based on GPU. In Proceedings of the IET International Radar Conference 2013, Xi’an, China, 14–16 April 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Sheng, H.; Wang, K.; Liu, X.; Li, J. A fast raw data simulator for the stripmap SAR based on CUDA via GPU. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, VIC, Australia, 21–26 July 2013; pp. 915–918. [Google Scholar]
- Zhang, F.; Hu, C.; Li, W.; Hu, W. Accelerating time-domain SAR raw data simulation for large areas using multi-GPUs. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 3956–3966. [Google Scholar] [CrossRef]
- Xu, Y.; Zeng, D.; Yan, T.; Xu, X. A real-time SAR echo simulator based on FPGA and parallel computing. Telkomnika 2015, 13, 806–812. [Google Scholar]
- Zhang, F.; Hu, C.; Li, W.; Hu, W.; Wang, P.; Li, H. A Deep Collaborative Computing Based SAR Raw Data Simulation on Multiple CPU/GPU Platform. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 387–399. [Google Scholar] [CrossRef]
- Zhang, F.; Yao, X.; Tang, H.; Yin, Q.; Hu, Y.; Lei, B. Multiple Mode SAR Raw Data Simulation and Parallel Acceleration for Gaofen-3 Mission. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2115–2126. [Google Scholar] [CrossRef]
- Hasselmann, D.; Dunckel, M.; Ewing, J.A. Directional Wave Spectra Observed during JONSWAP 1973. J. Phys. Ocean. 1980, 10, 1264–1280. [Google Scholar] [CrossRef]
- Neumann, G. On Ocean Wave Spectra and a New Method of Forecasting Wind-Generated Sea; Beach Erosion Board, Corps of Engineering, Technical Memorandum: Washington, DC, USA, 1953; p. 43. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameters | No. I | No. II |
|---|---|---|
| Bandwidth | 180 MHz | 180 MHz |
| Pulse duration | 1.0 µs | 1.0 µs |
| Range sample space | 0.68 m | 0.75 m |
| Incidence angle | 60° | 45° |
| Center frequency | 15 GHz | 15 GHz |
| Platform height | 2.0 km | 2.0 km |
| Effective radar velocity | 300 m/s | 300 m/s |
| Doppler bandwidth | 400 Hz | 200 Hz |
| PRF | 450 Hz | 250 Hz |
| Azimuth sample space | 0.66 m | 1.20 m |
| GPU Version | CUDA Version | Graphics Memory | Compiler Environment | CPU Version | Total Memory | Operation System |
|---|---|---|---|---|---|---|
| NVIDIA GeForce RTX3060 | 10.0 | 6G | VS2019 | 11th Gen Intel(R) Core (TM) i7-11800H | 16 G | Windows 10 |
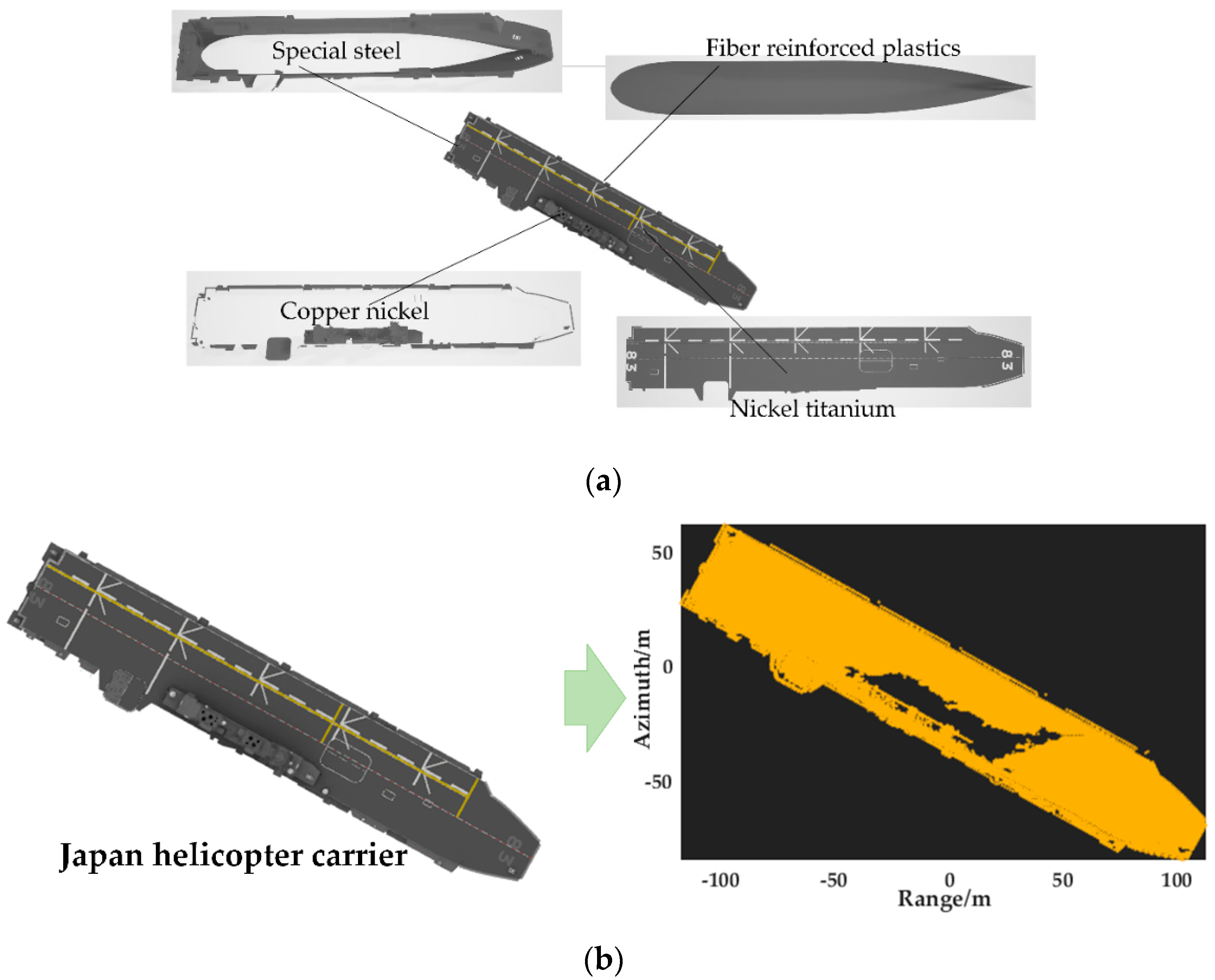
| Material (Main Component) | Relative Permittivity | Diffuse Coefficient | Specular Coefficient | Specular Index | Energy Decay Coefficient |
|---|---|---|---|---|---|
| Aluminum | 8.00 | 0.75 | 0.80 | 50.00 | 0.20 |
| Fiber-reinforced plastics | 8.50 | 0.80 | 0.60 | 50.00 | 0.10 |
| Special steel | 9.50 | 0.65 | 0.80 | 30.00 | 0.25 |
| Copper–nickel | 12.00 | 0.70 | 0.50 | 50.00 | 0.15 |
| Inconel | 10.50 | 0.75 | 0.40 | 30.00 | 0.10 |
| Nickel–titanium | 15.00 | 0.65 | 0.70 | 40.00 | 0.20 |
| Model | SAR Image Size () | Lattice Number | CPU Time | GPU Time | Speedup Rate | |
|---|---|---|---|---|---|---|
| Japanese helicopter carrier | Azimuth | 680 samples | 125,972 | 65.14 h | 0.31 h | 210.1× |
| Range | 796 samples | |||||
| Reference Image | Normalized Cross-Correlation | Mean Hash Similarity | Cosine Similarity |
|---|---|---|---|
| Real SAR image | 0.89 | 0.91 | 0.93 |
| Model | SAR Image Size () | Lattice Number | CPU Time | GPU Time | Speedup Rate | |
|---|---|---|---|---|---|---|
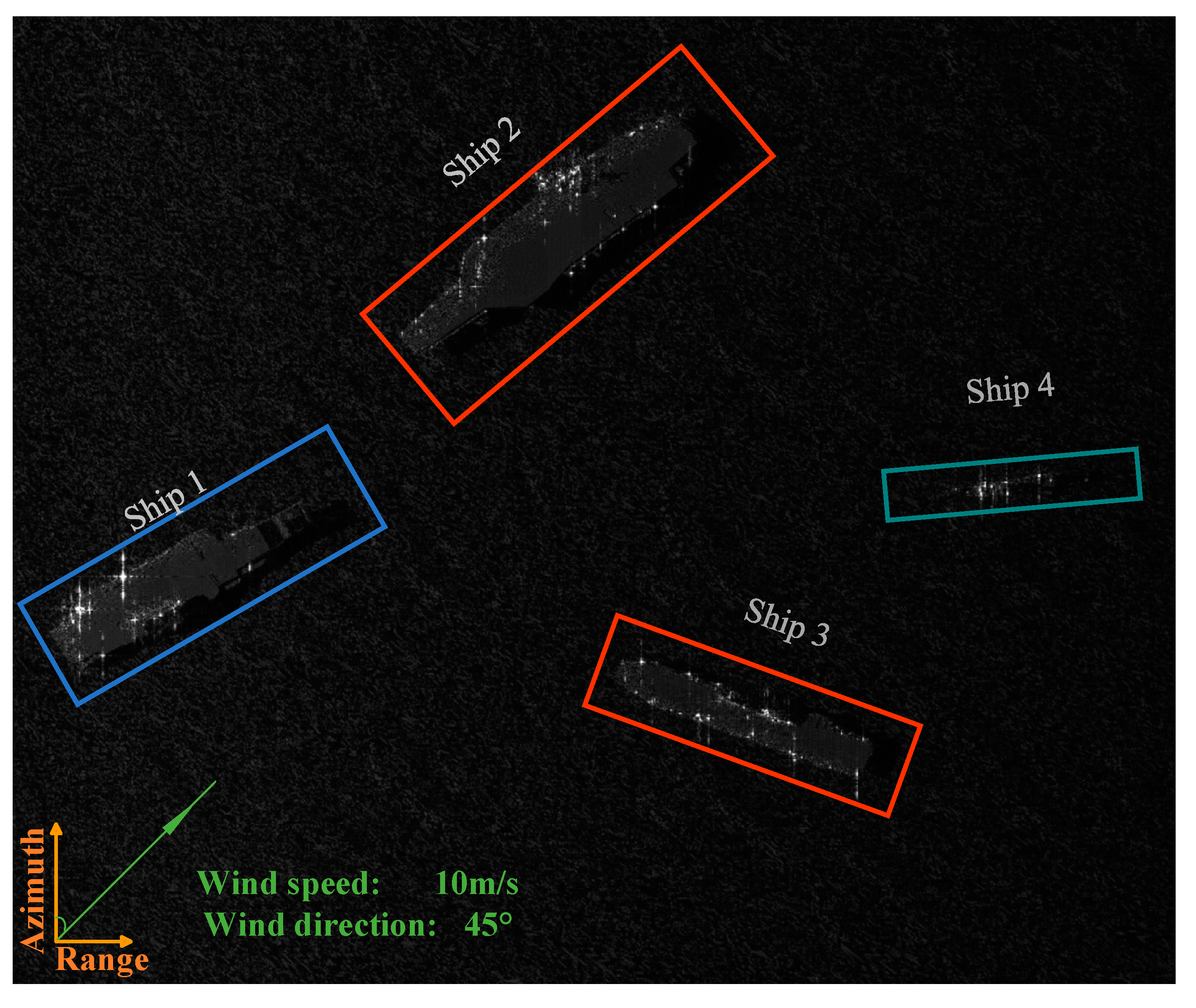
| Composite model of the sea and ships | Azimuth | 1021 samples | 3,928,125 | 242.51 h | 0.92 h | 263.6× |
| Range | 1319 samples | |||||
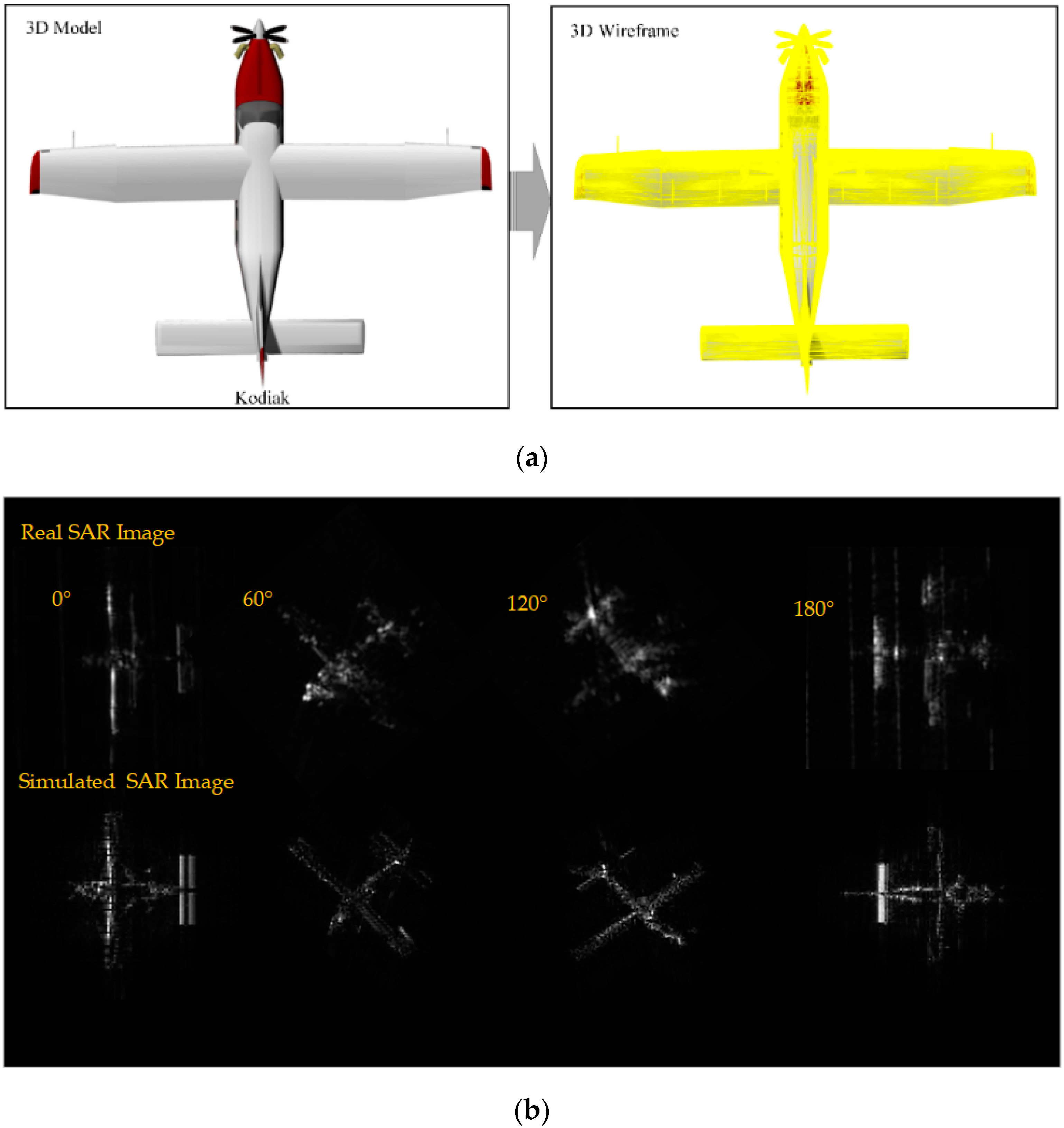
| Model | SAR Image Size () | Rotation Angle | Lattices Number | CPU Time | GPU Time | Speedup Rate | |
|---|---|---|---|---|---|---|---|
| Quest Kodiak 100 | Azimuth | 355 samples | 0° | 6996 | 56.96 min | 0.29 min | 196.4× |
| 60° | 9244 | 73.70 min | 0.32 min | 230.3× | |||
| Range | 577 samples | 120° | 9229 | 77.79 min | 0.38 min | 204.7× | |
| 180° | 6623 | 46.60 min | 0.21 min | 221.9× | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, K.; Jin, G.; Xiong, X.; Shi, Q. Bounding Volume Hierarchy-Assisted Fast SAR Image Simulation Based on Spatial Segmentation. Appl. Sci. 2024, 14, 3340. https://doi.org/10.3390/app14083340
Wu K, Jin G, Xiong X, Shi Q. Bounding Volume Hierarchy-Assisted Fast SAR Image Simulation Based on Spatial Segmentation. Applied Sciences. 2024; 14(8):3340. https://doi.org/10.3390/app14083340
Chicago/Turabian StyleWu, Ke, Guowang Jin, Xin Xiong, and Quanjie Shi. 2024. "Bounding Volume Hierarchy-Assisted Fast SAR Image Simulation Based on Spatial Segmentation" Applied Sciences 14, no. 8: 3340. https://doi.org/10.3390/app14083340
APA StyleWu, K., Jin, G., Xiong, X., & Shi, Q. (2024). Bounding Volume Hierarchy-Assisted Fast SAR Image Simulation Based on Spatial Segmentation. Applied Sciences, 14(8), 3340. https://doi.org/10.3390/app14083340