
Study on Ring Deformation and Contact Characteristics of Thin-Walled Bearing for RV Reducer


Abstract
:1. Introduction
2. Theoretical Analysis
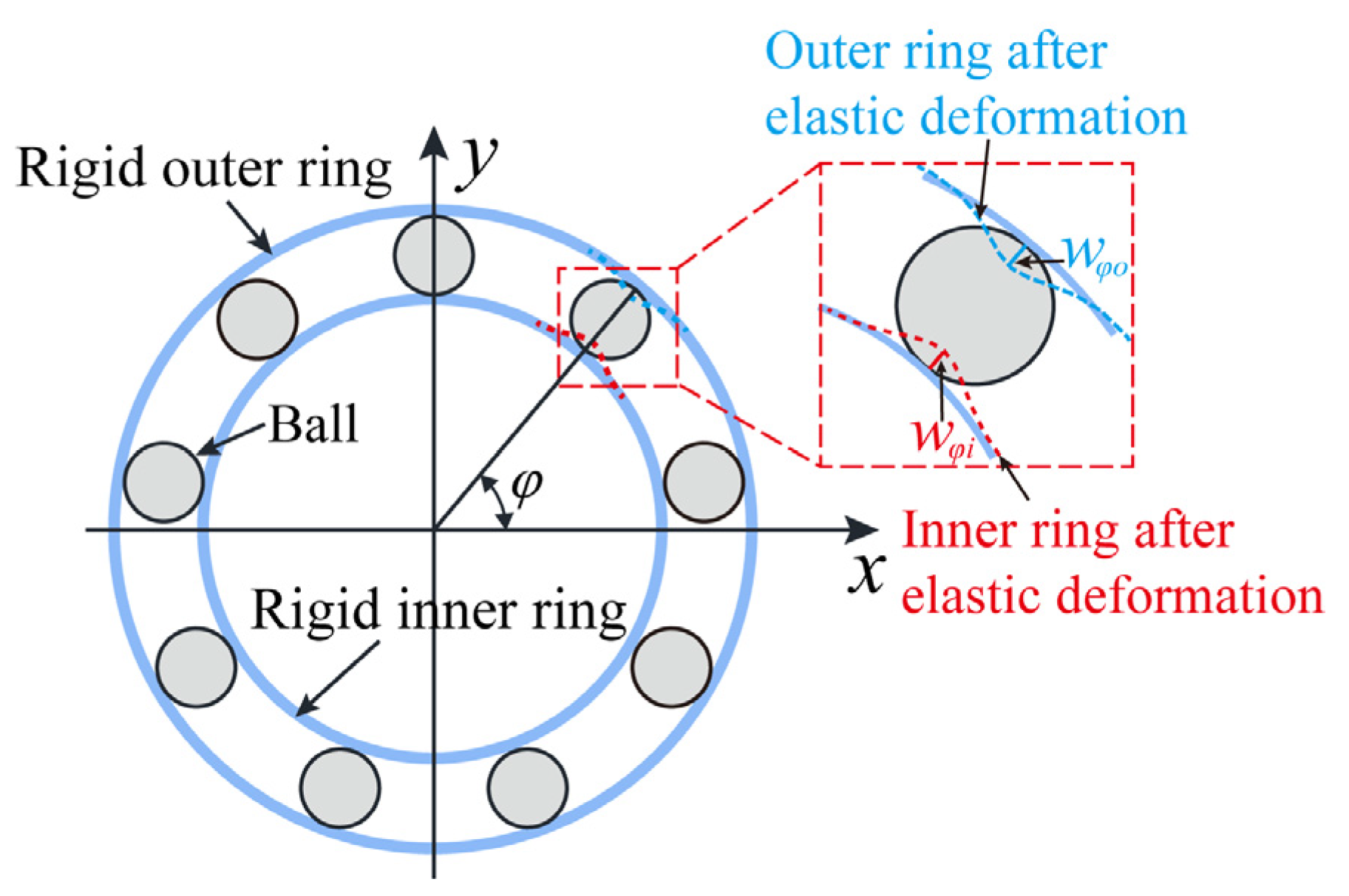
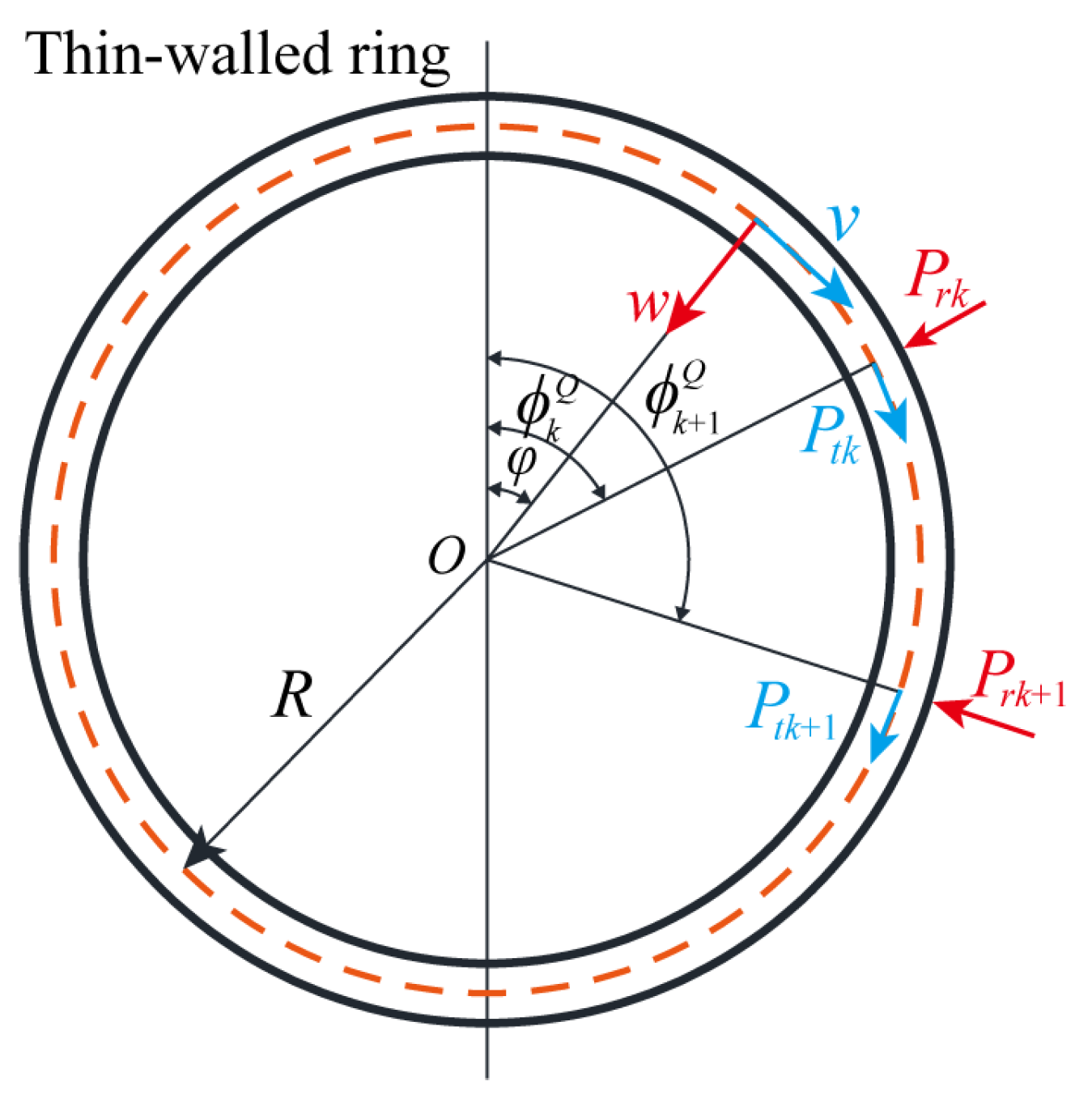
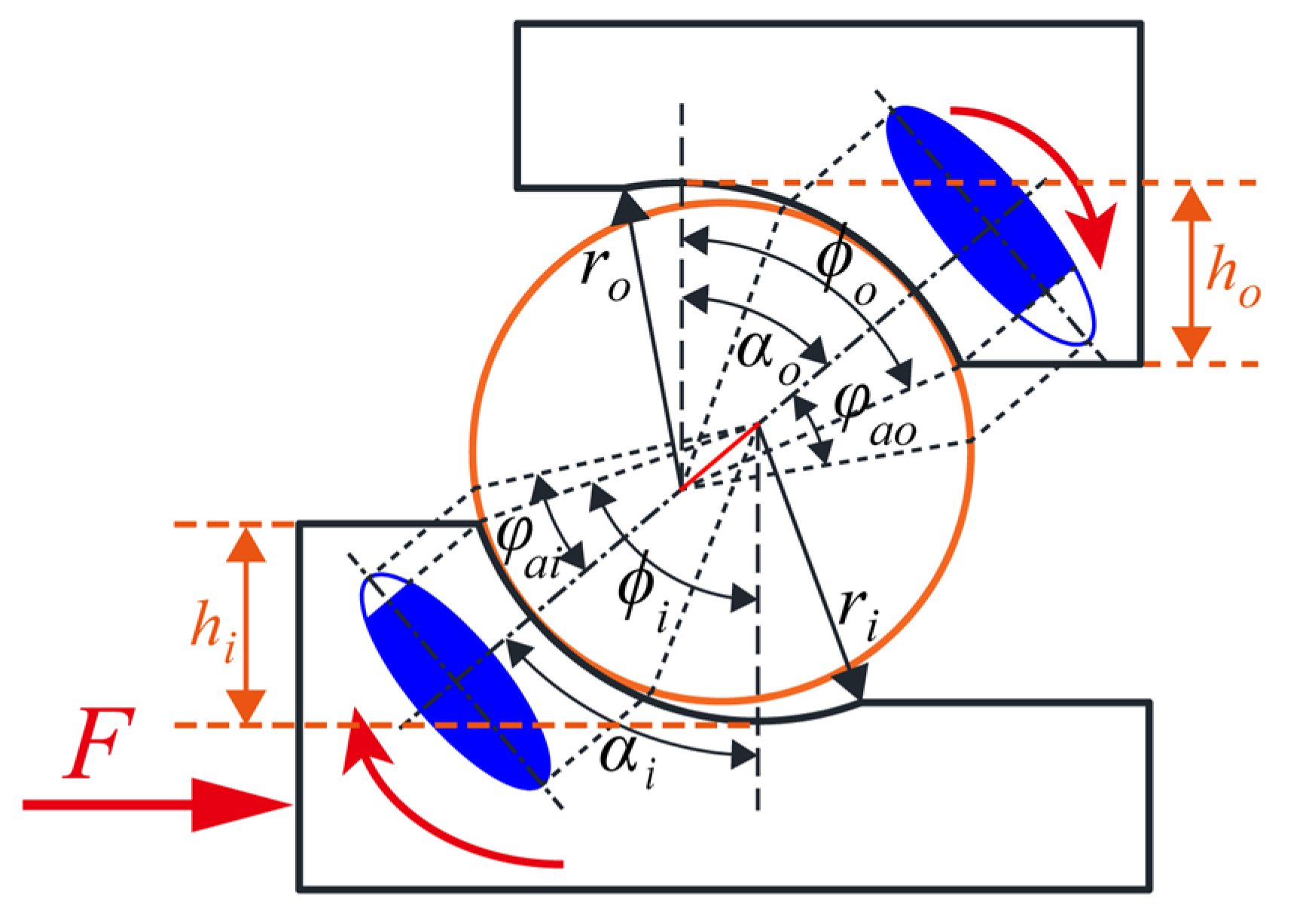
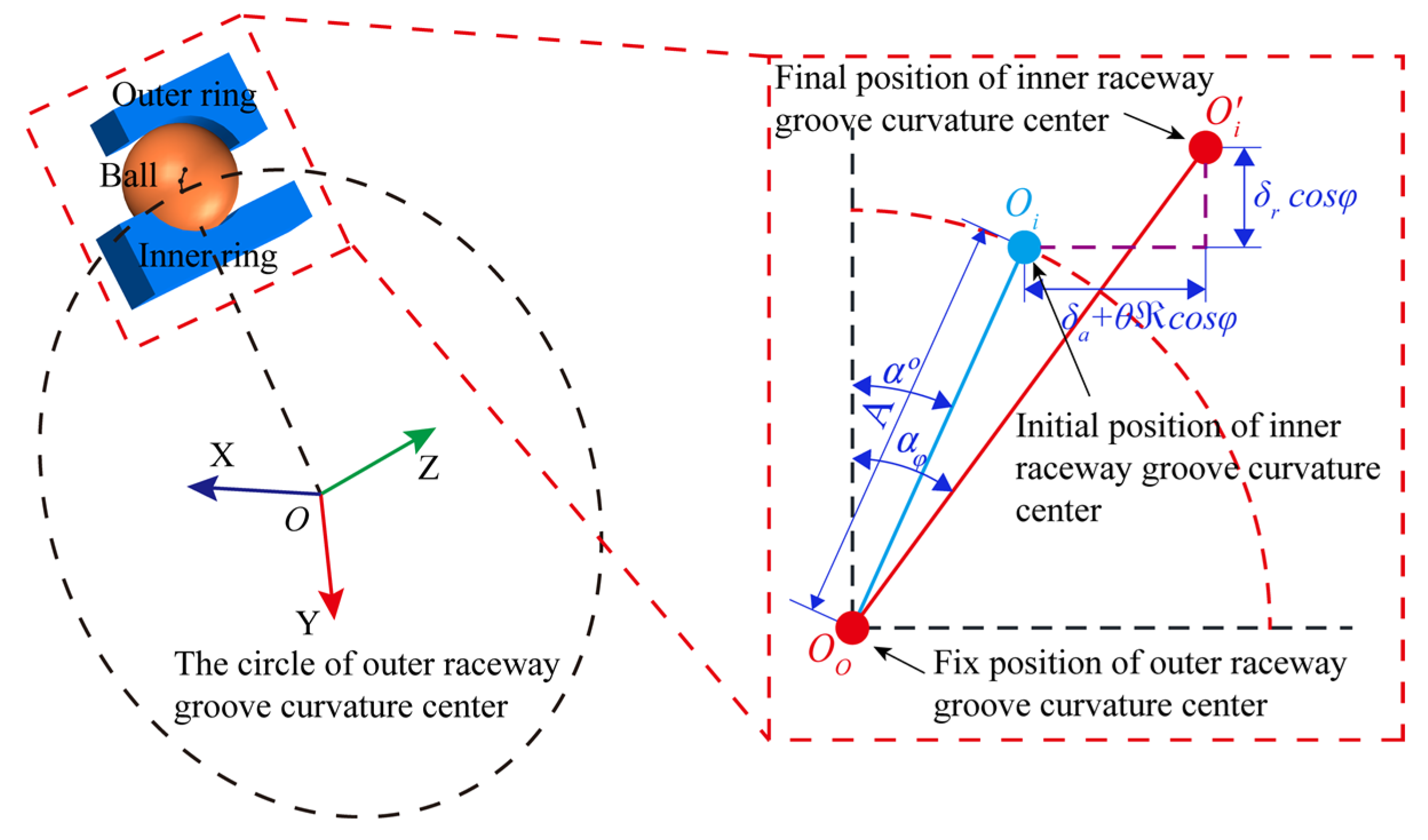
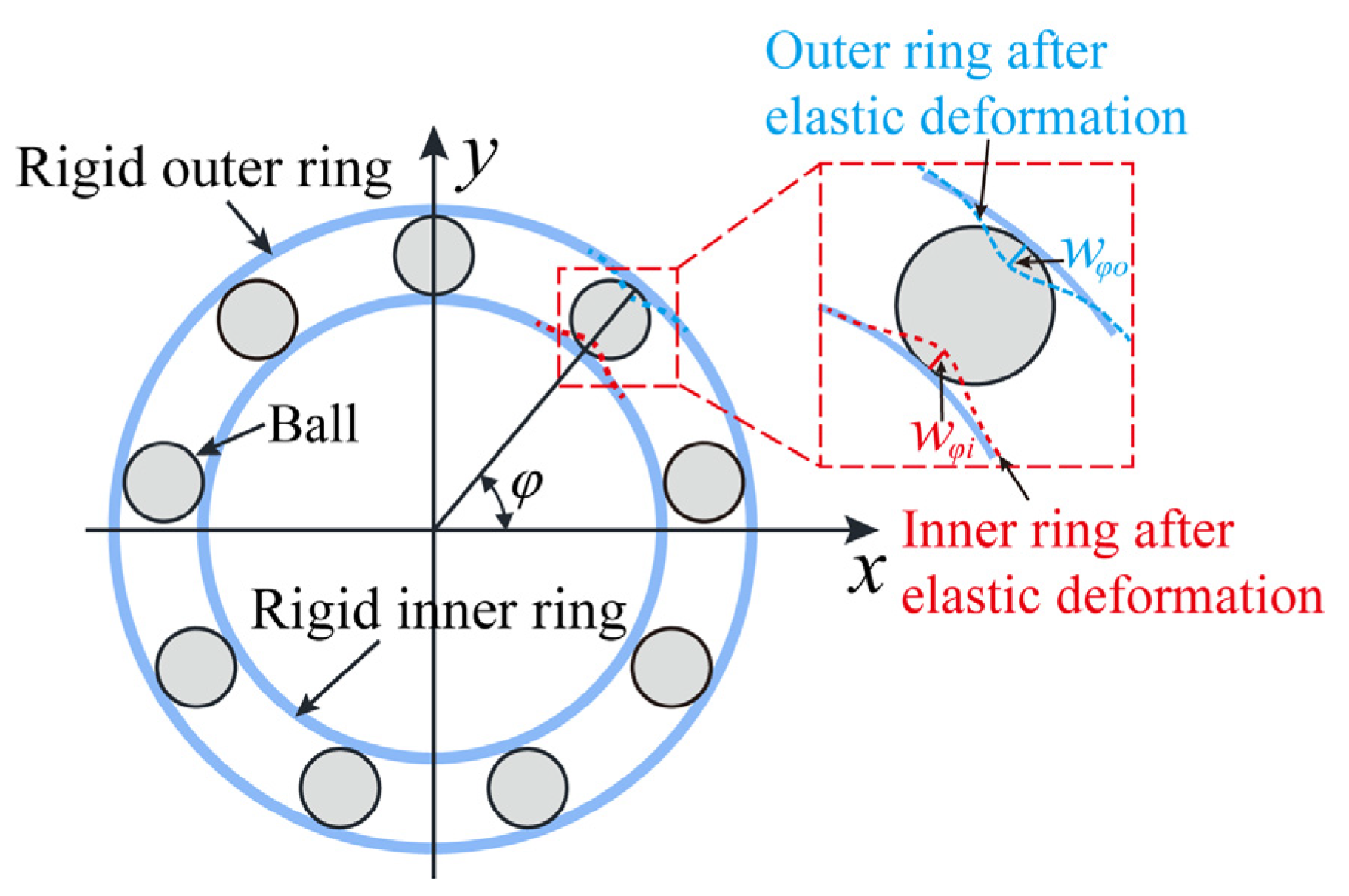
2.1. Mathematical Model
Model Solution
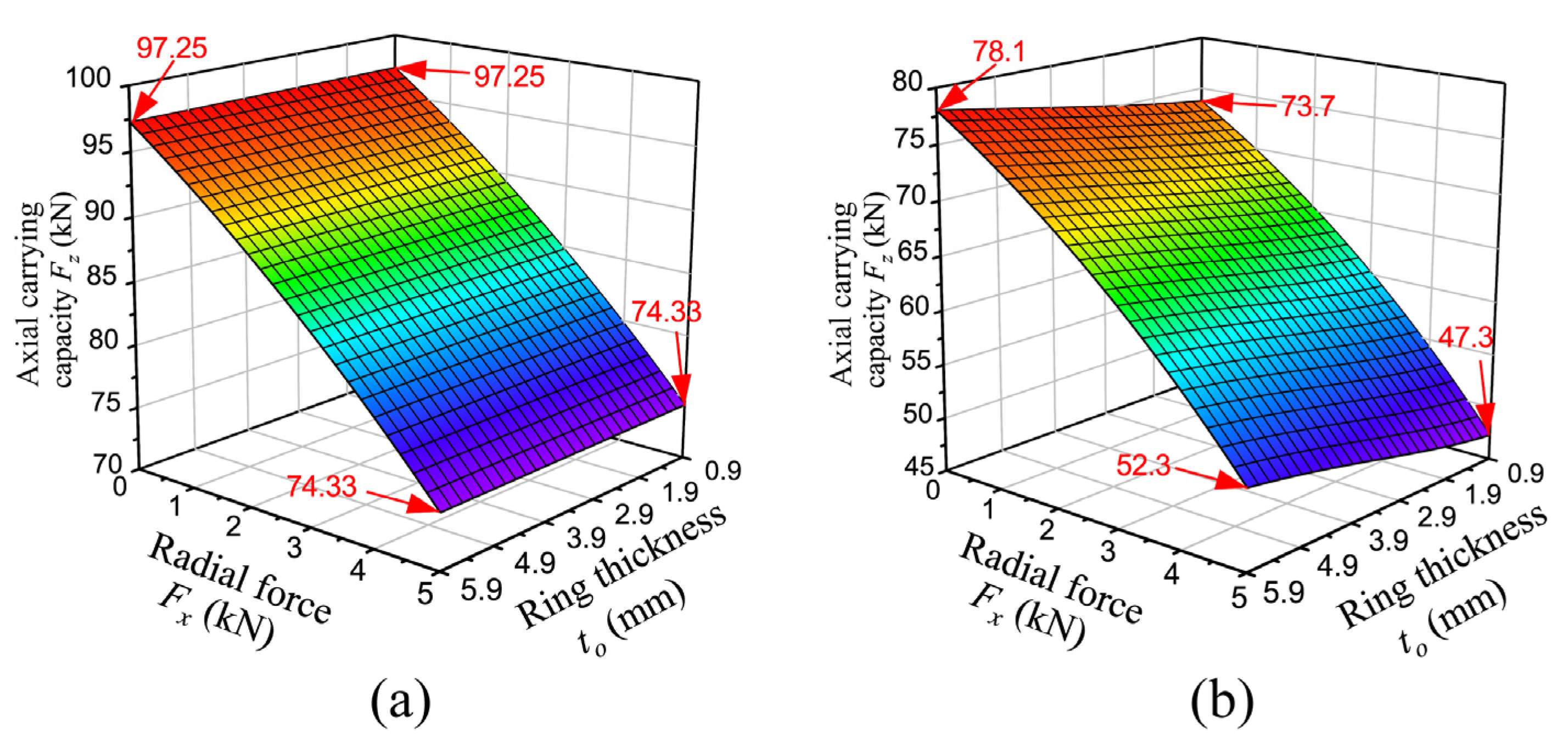
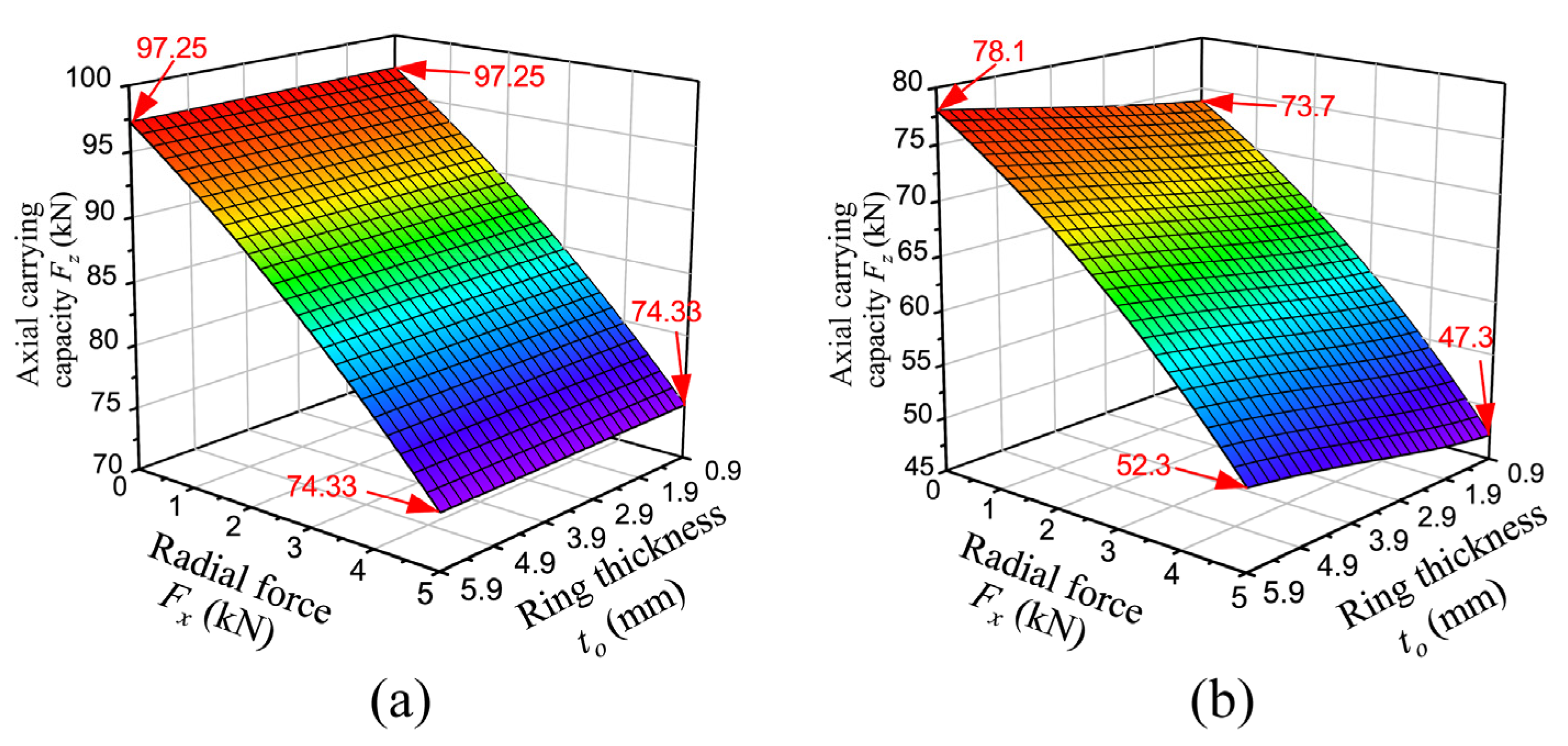
2.2. Analysis of the Carrying Capacity
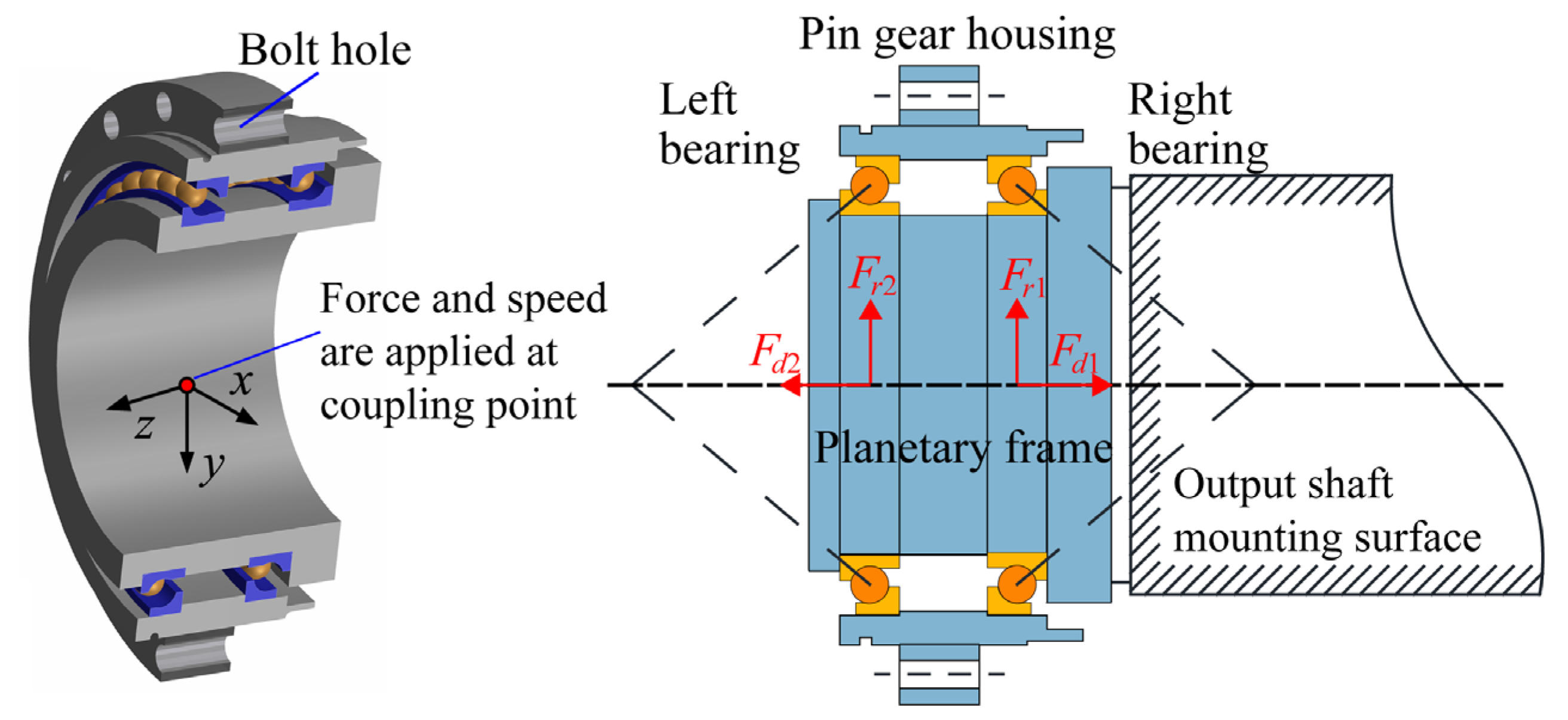
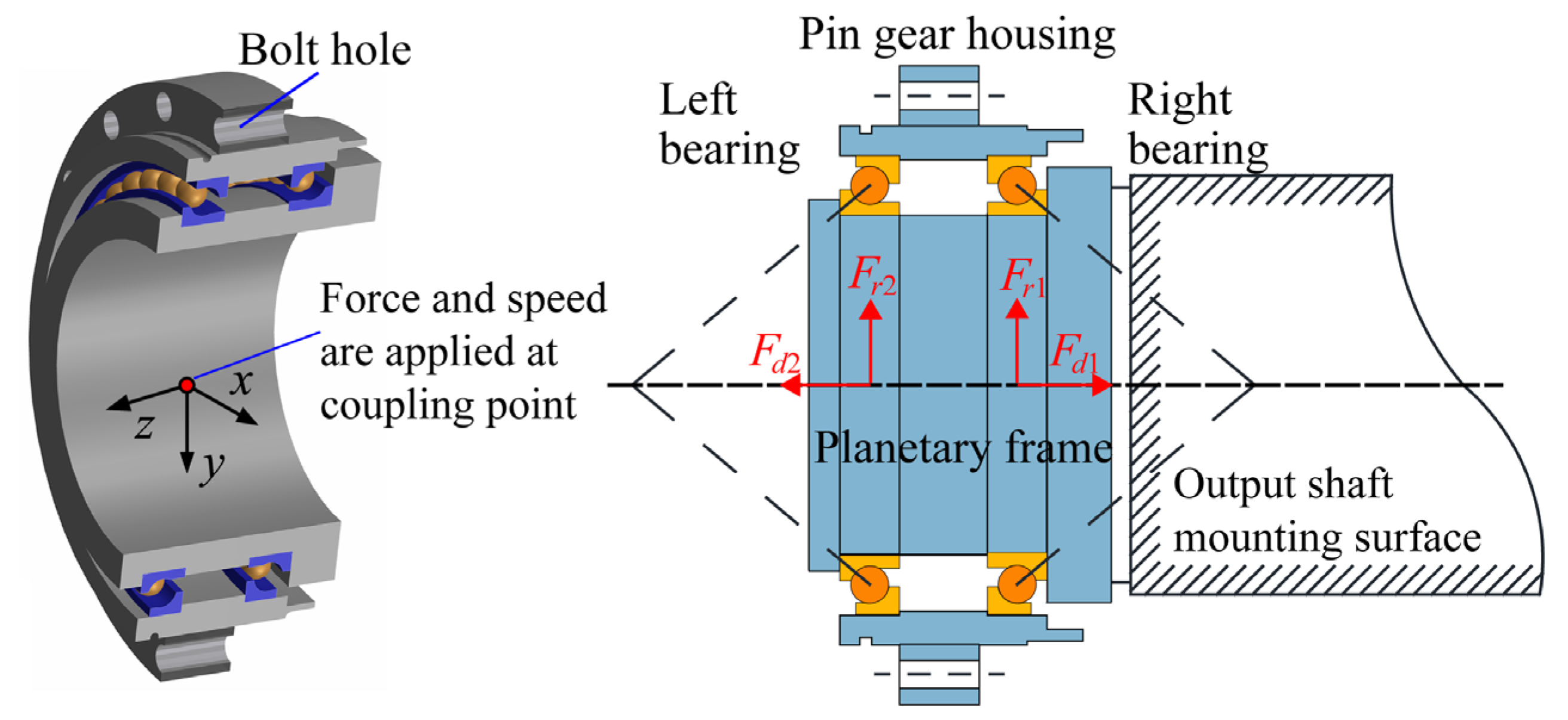
2.3. Simulation Model of the RV Reducer Main Bearings
3. Results and Discussion
3.1. Model Validation
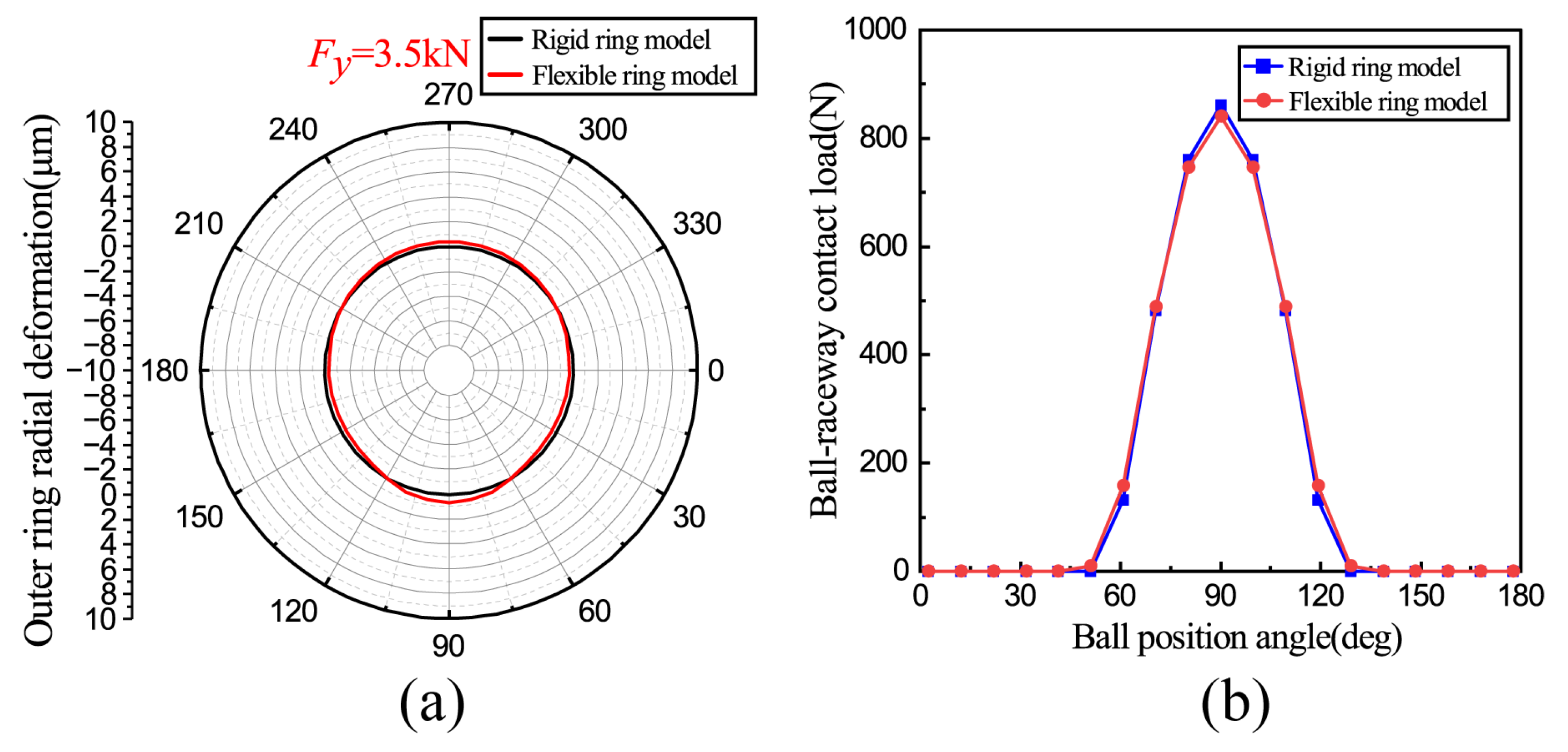
3.2. Comparison of Rigid and Flexible Ring Model Results
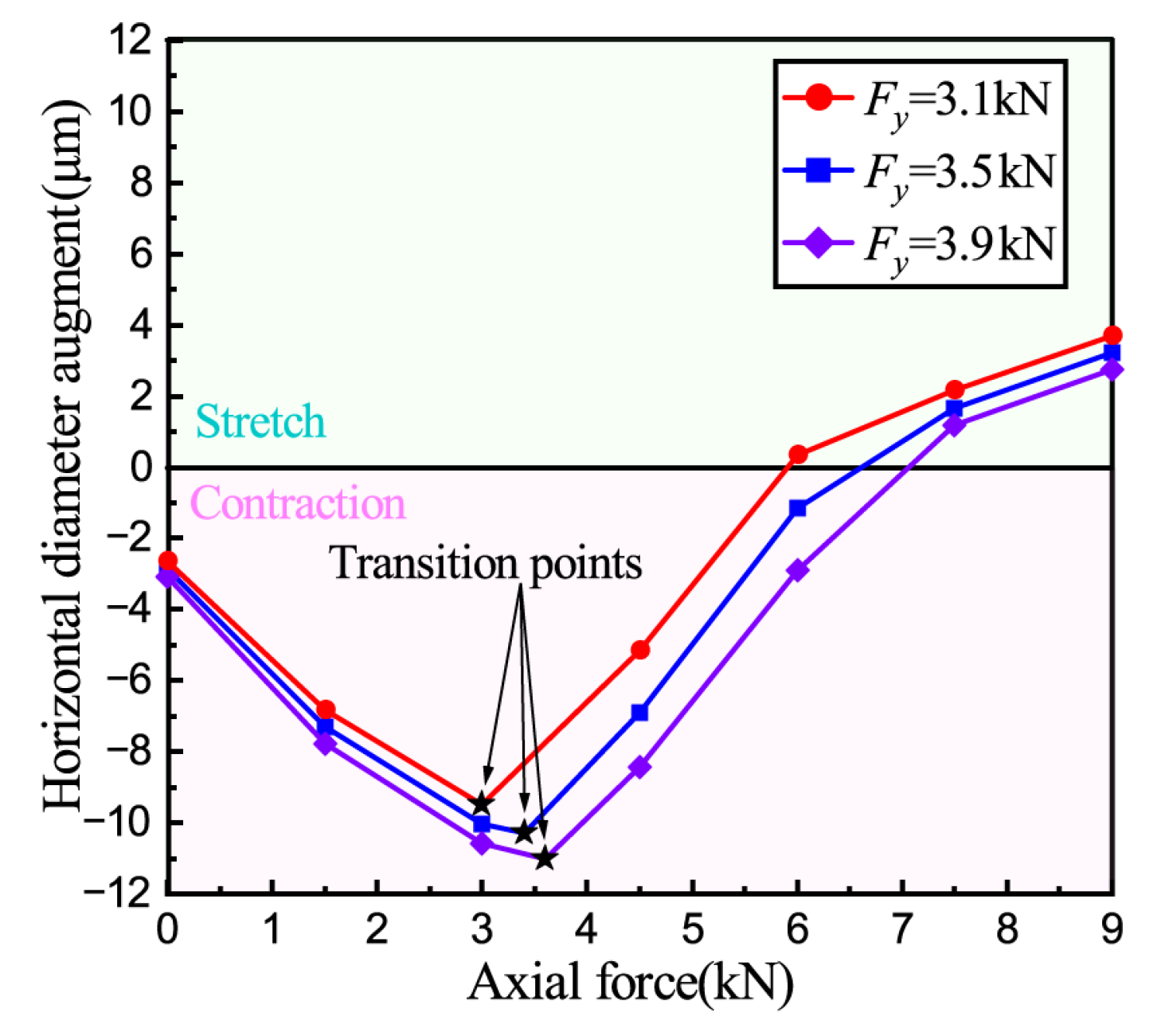
3.3. The Effect of Axial Force
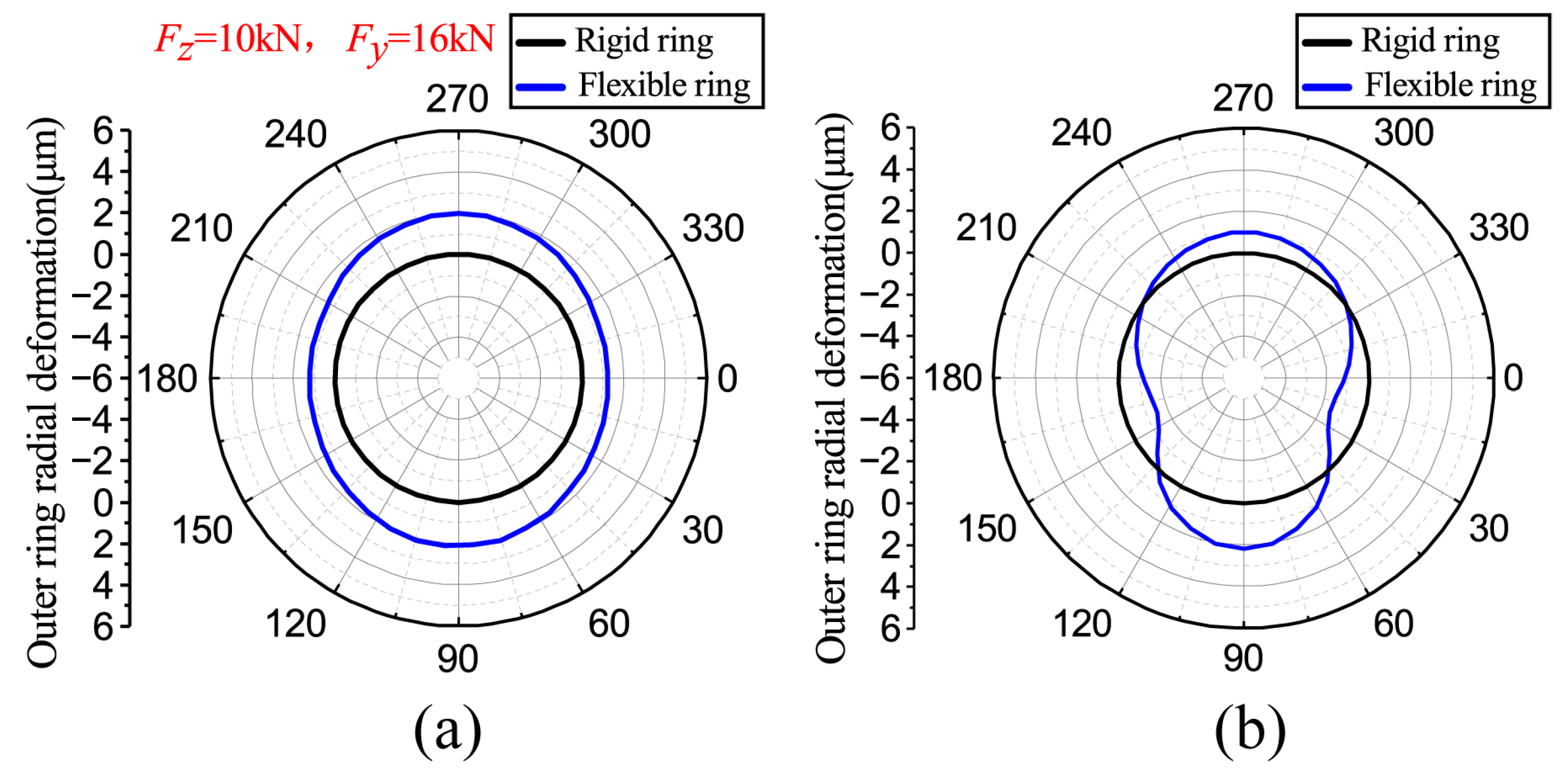
3.4. The Effect of Radial Force
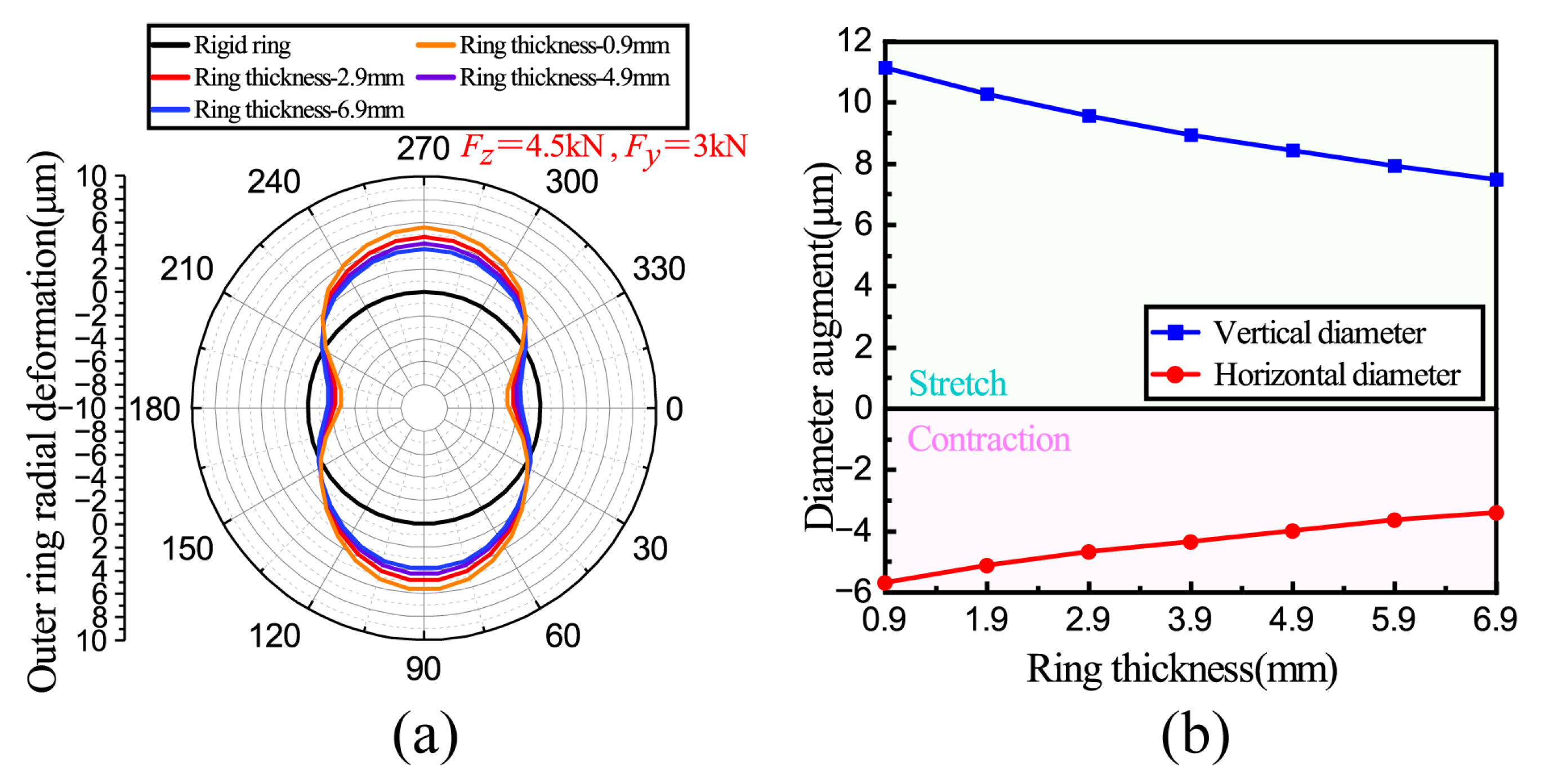
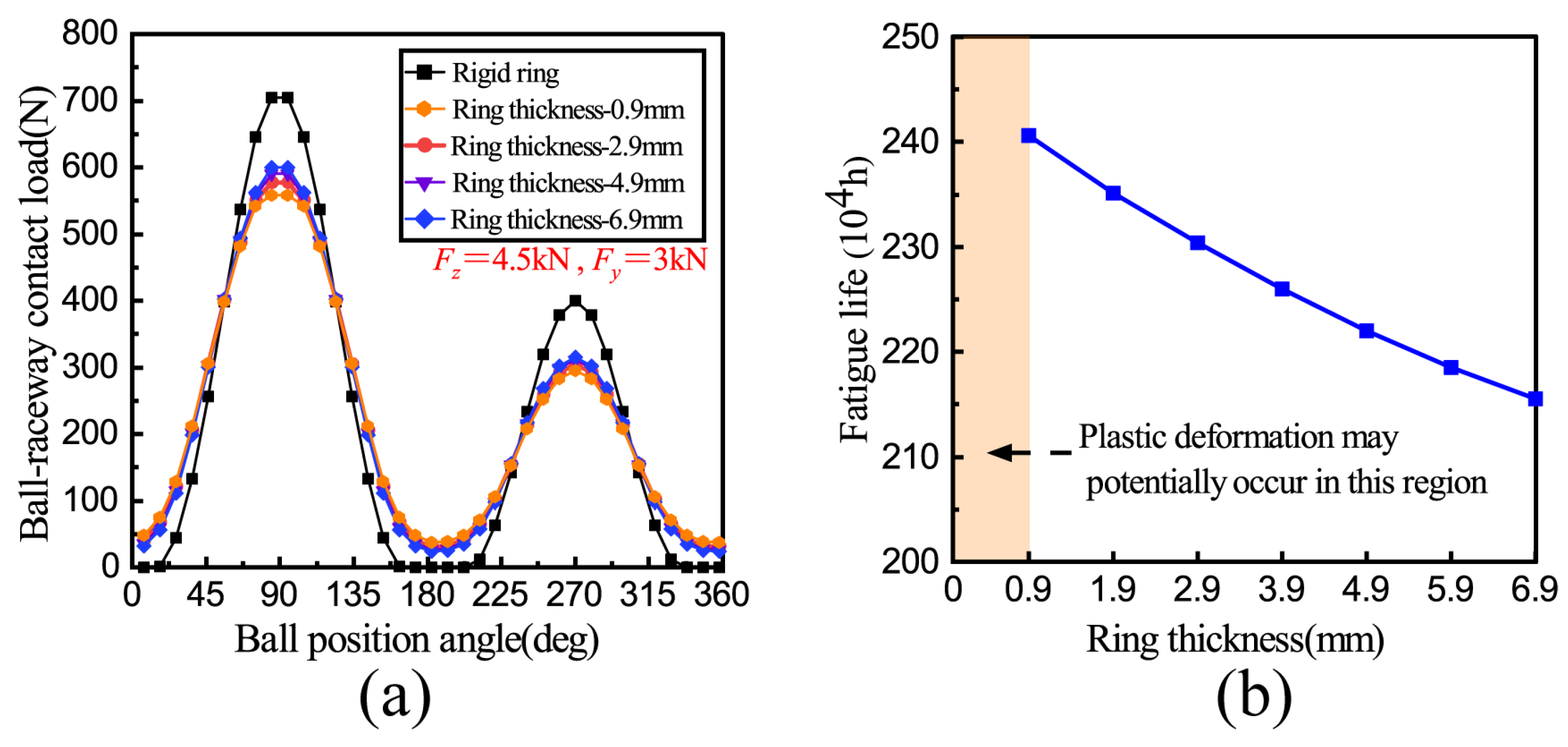
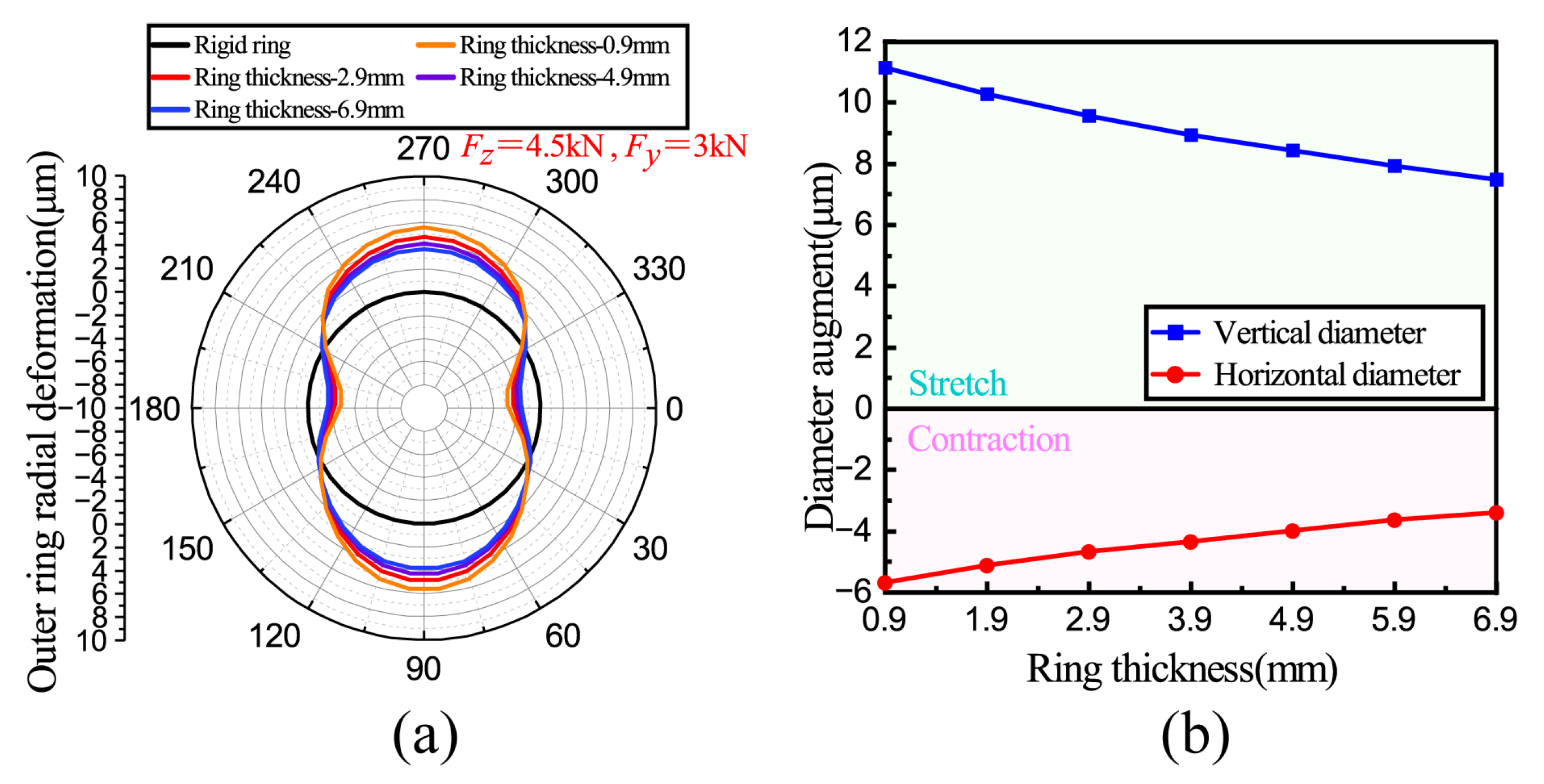
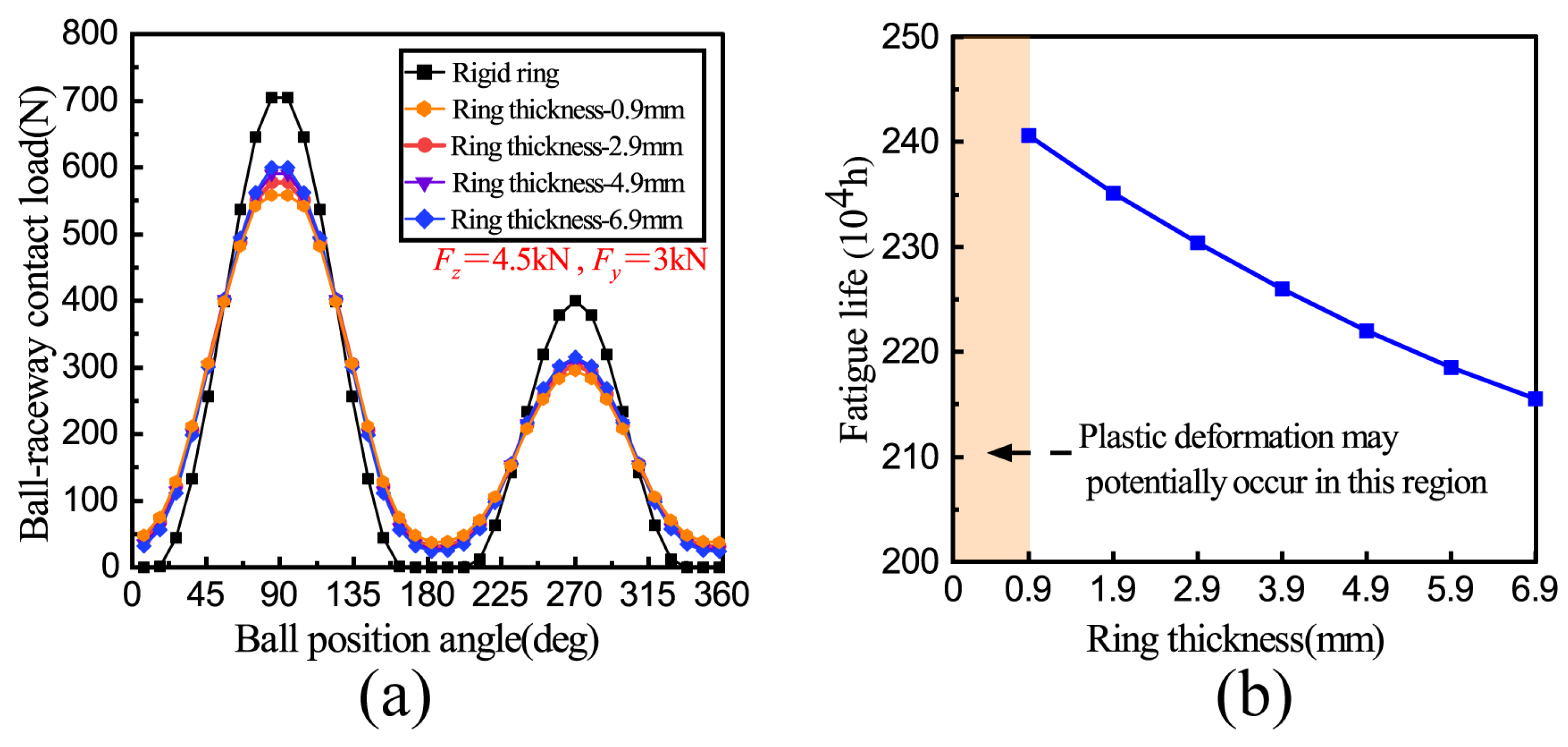
3.5. The Effect of the Outer Ring Thickness
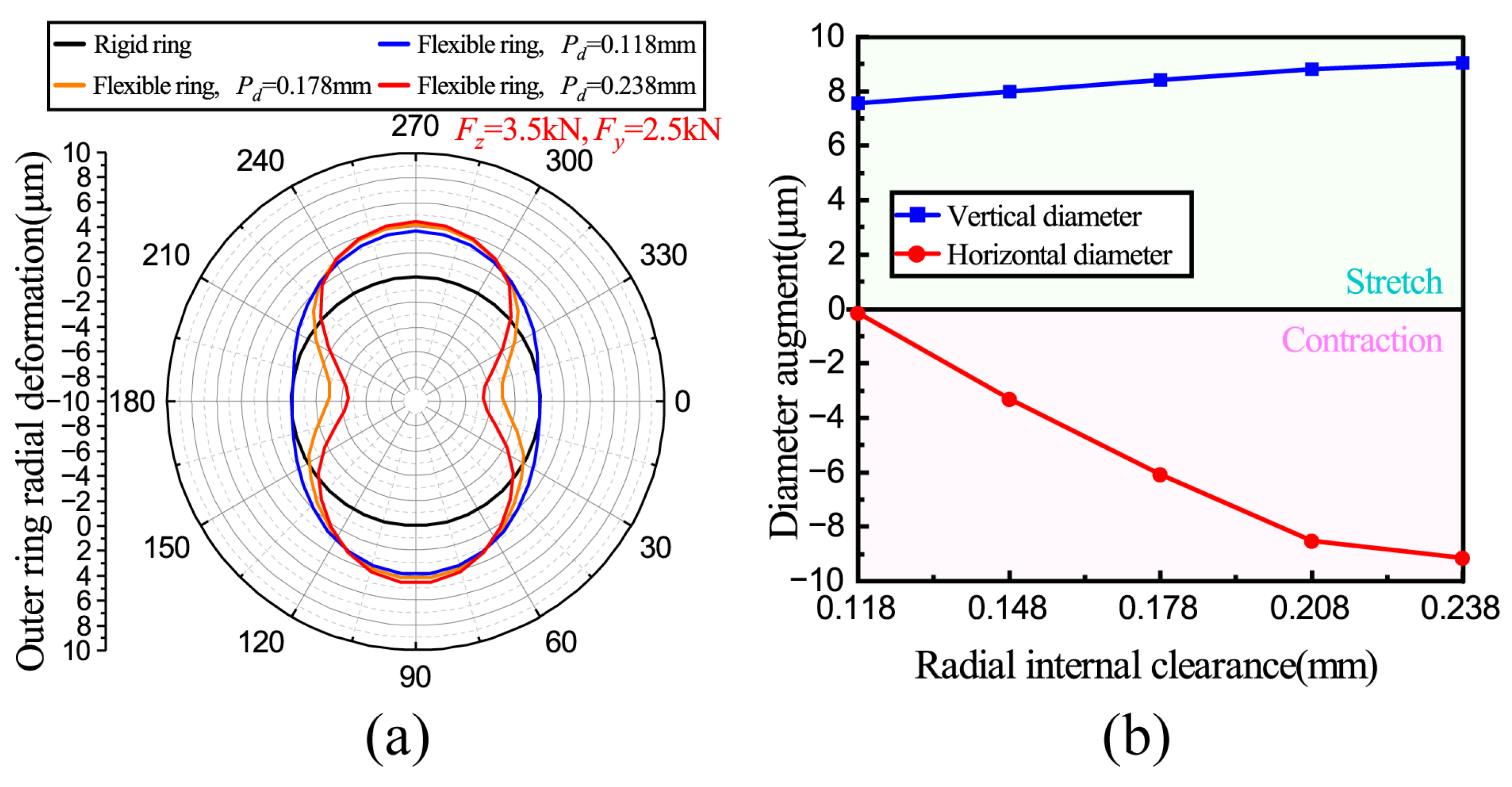
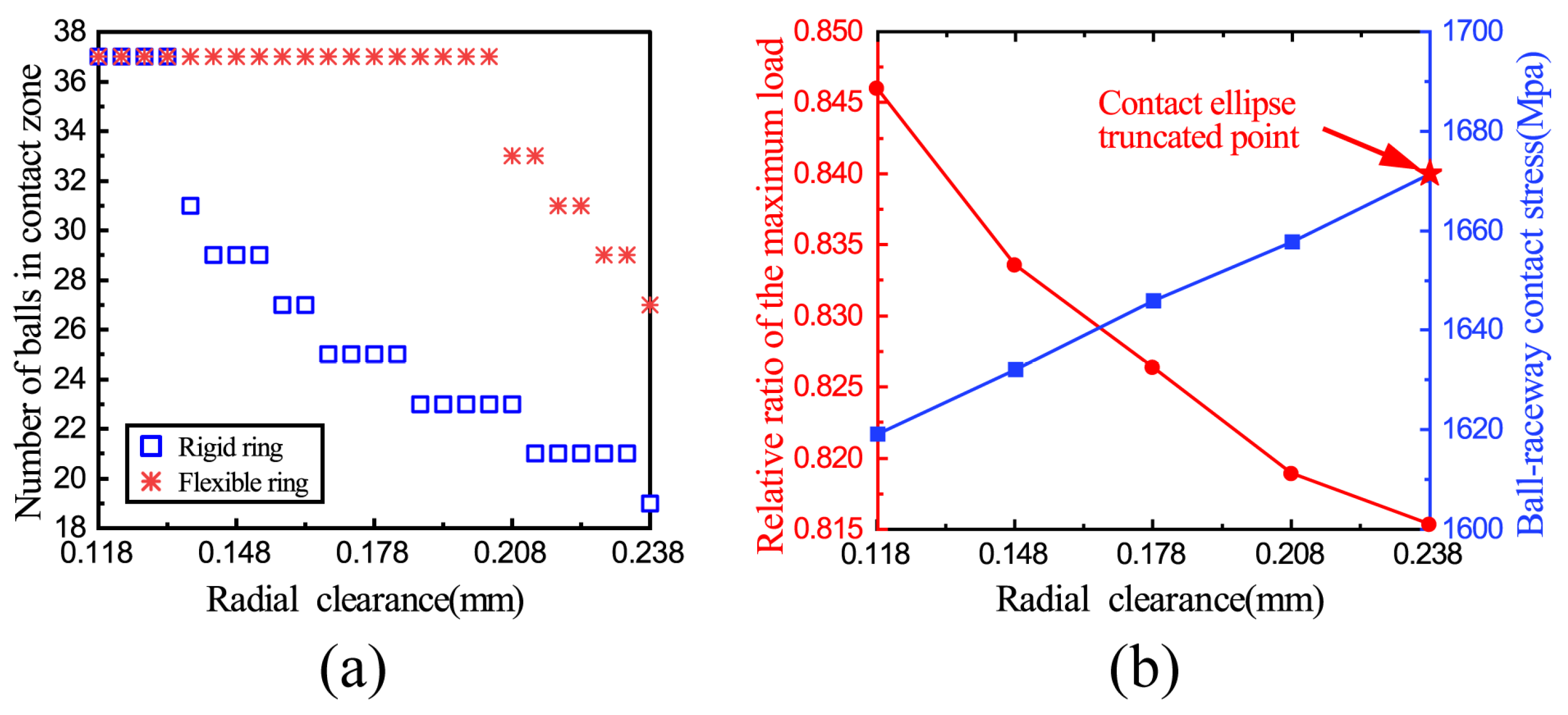
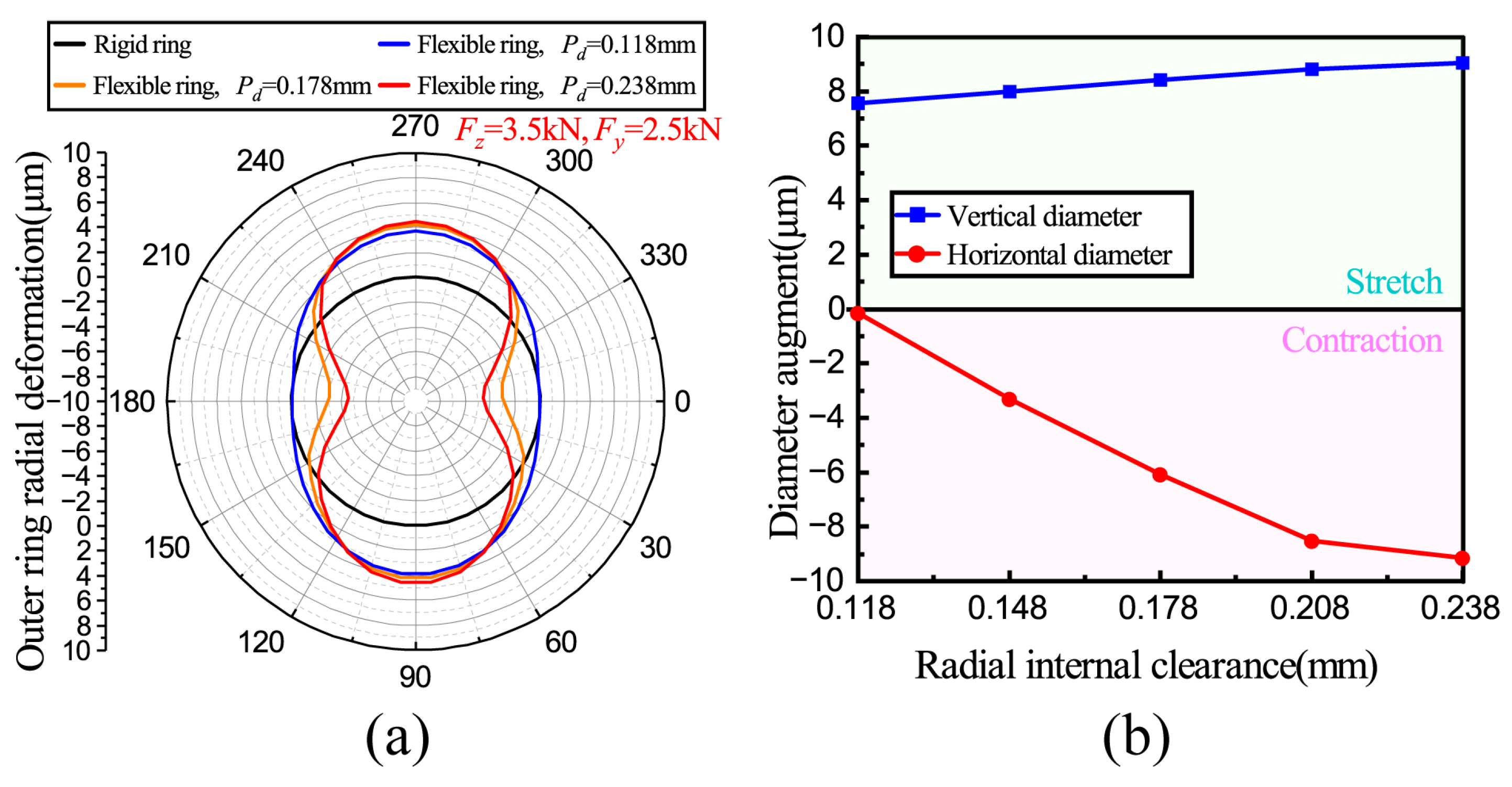
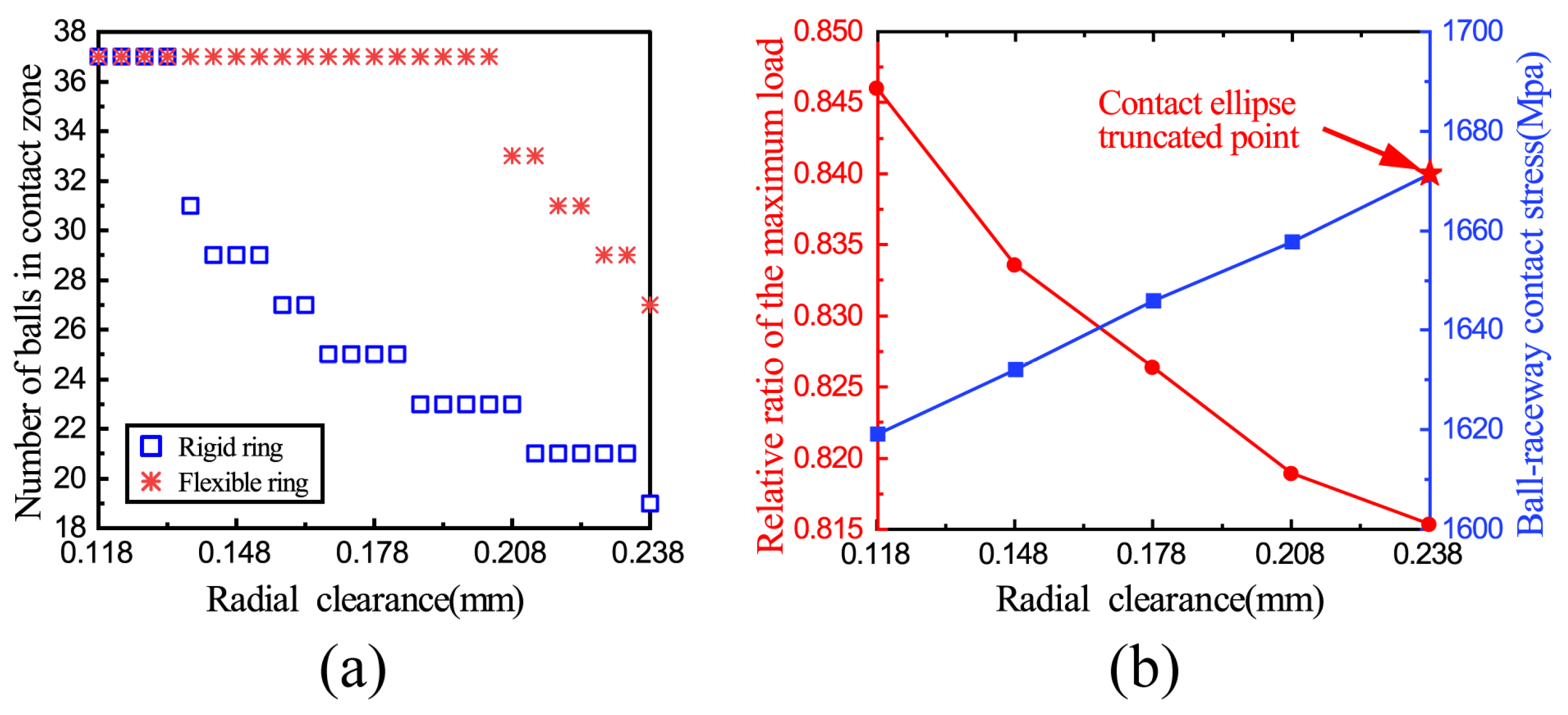
3.6. The Effect of Radial Clearance
4. Conclusions
- (1)
- Ring deformation cannot be ignored in the analysis of thin-walled bearings. The distribution of ball–raceway contact loads determines both the extent and the trend of ring deformation. Ring deformation can improve the mechanical characteristics and extend the fatigue life of bearings. However, the ring deformation makes the ball–raceway contact ellipse closer or even exceeds the raceway rib, leading to ellipse truncation. Therefore, focusing on the raceway rib design is crucial when designing thin-walled bearings;
- (2)
- The optimization effect of ring deformation on load distribution varies under different conditions. The increase in axial force and ring thickness weakens this optimization effect, while the increase in radial force and clearance enhances it but also results in an increase in contact stress. In actual engineering, bearing engineers can design ring thickness, clearance, and the raceway rib reasonably according to the research results of this paper and improve the optimization effect of ring deformation on load distribution and fatigue life without plastic deformation of bearings to improve the service performance of bearings effectively;
- (3)
- Significant differences are observed in the variation trends and mutation positions in the number of loaded balls between the rigid and flexible ring models, resulting in substantial differences in the contact characteristics of the two models under the same load condition;
- (4)
- After considering the ring deformation, the carrying capacity of the bearing decreases, with a heightened sensitivity to radial force and radial clearance. In this research, the maximum carrying capacity was reduced by 38.2%, which occurred by coupling the maximum radial force and the maximum clearance.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pham, A.-D.; Ahn, H.-J. High precision reducers for industrial robots driving 4th industrial revolution: State of arts, analysis, design, performance evaluation and perspective. Int. J. Precis. Eng. Manuf.-Green Technol. 2018, 5, 519–533. [Google Scholar] [CrossRef]
- Hong, S.W.; Tong, V.C. Rolling-element bearing modeling: A review. Int. J. Precis. Eng. Manuf. 2016, 17, 1729–1749. [Google Scholar] [CrossRef]
- Zhang, J.; Fang, B.; Hong, J.; Zhu, Y. Effect of preload on ball-raceway contact state and fatigue life of angular contact ball bearing. Tribol. Int. 2017, 114, 365–372. [Google Scholar] [CrossRef]
- Xie, Y.; Xu, L.; Deng, Y. A dynamic approach for evaluating the moment rigidity and rotation precision of a bearing-planetary frame rotor system used in RV reducer. Mech. Mach. Theory 2022, 173, 104851. [Google Scholar] [CrossRef]
- Deng, F.; Li, K.; Hu, X.; Jiang, H.; Huang, F. Life calculation of angular contact ball bearings for industrial robot RV reducer. Ind. Lubr. Tribol. 2019, 71, 826–831. [Google Scholar] [CrossRef]
- Göncz, P.; Potočnik, R.; Glodež, S. Computational model for determination of static load capacity of three-row roller slewing bearings with arbitrary clearances and predefined raceway deformations. Int. J. Mech. Sci. 2013, 73, 82–92. [Google Scholar] [CrossRef]
- Li, Y. Effects of design parameters on carrying capacity of a double-row tapered roller slewing bearing used in wind turbine. Adv. Mech. Eng. 2016, 8, 1–10. [Google Scholar] [CrossRef]
- Li, Y.; Jiang, D. Dynamic carrying capacity analysis of double-Row four-Point contact ball slewing bearing. Math. Probl. Eng. 2015, 2015, 850908. [Google Scholar] [CrossRef]
- Pathuvoth, D.; Sekhar, A.S. Static capacity of slewing bearings considering ellipse truncation. Tribol. Int. 2022, 173, 107595. [Google Scholar] [CrossRef]
- Harris, T.A.; Kotzalas, M.N. Advanced Concepts of Bearing Technology Rolling Bearing Analysis; CRC Press: Boca Raton, FL, USA; Taylor Francis Group: New York, NY, USA, 2006. [Google Scholar]
- Xu, H.; Wang, P.; Ma, H.; He, D.; Zhao, X.; Yang, Y. Analysis of axial and overturning ultimate load-bearing capacities of deep groove ball bearings under combined loads and arbitrary rotation speed. Mech. Mach. Theory 2022, 169, 104665. [Google Scholar] [CrossRef]
- Wang, S.; Du, J.; Chen, Y.; Wu, S.; Huang, Z. Influence of elliptical truncation on the raceway in a four-point contact pitching bearing. Eng. Fail. Anal. 2022, 141, 106711. [Google Scholar] [CrossRef]
- Gao, X.; Huang, X.; Wang, H.; Hong, R.; Chen, J. Effect of raceway geometry parameters on the carrying capability and the service life of a four-point-contact slewing bearing. J. Mech. Sci. Technol. 2010, 24, 2083–2089. [Google Scholar] [CrossRef]
- He, P.; Qian, Q.; Wang, Y.; Liu, H.; Guo, E.; Wang, H. Influence of finite element mesh size on the carrying capacity analysis of single-row ball slewing bearing. Adv. Mech. Eng. 2021, 13, 1–12. [Google Scholar] [CrossRef]
- Olave, M.; Sagartzazu, X.; Damian, J.; Serna, A. Design of four contact-point slewing bearing with a new load distribution procedure to account for structural stiffness. J. Mech. Des. 2010, 132, 021006. [Google Scholar] [CrossRef]
- Yan, K.; Hong, J.; Zhang, J.; Mi, W.; Wu, W. Thermal-deformation coupling in thermal network for transient analysis of spindle-bearing system. Int. J. Therm. Sci. 2016, 104, 1–12. [Google Scholar] [CrossRef]
- Harris, T.A.; Broschard, J.L. Analysis of an improved planetary gear-transmission bearing. J. Basic Eng. 1964, 86, 457–461. [Google Scholar] [CrossRef]
- Cavallaro, G.; Nelias, D. Analysis of high-speed intershaft cylindrical roller bearing with flexible rings. Tribol. Trans. 2005, 48, 154–164. [Google Scholar] [CrossRef]
- Wagner, C.; Krinner, A.; Thümmel, T.; Rixen, D. Full dynamic ball bearing model with elastic outer ring for high speed applications. Lubricants 2017, 5, 17. [Google Scholar] [CrossRef]
- Liu, J.; Tang, C.; Shao, Y. An innovative dynamic model for vibration analysis of a flexible roller bearing. Mech. Mach. Theory 2019, 135, 27–39. [Google Scholar] [CrossRef]
- Hao, X.; Gu, X.; Zhou, X.; Liao, X.; Han, Q. Distribution characteristics of stress and displacement of rings of cylindrical roller bearing. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 4348–4358. [Google Scholar] [CrossRef]
- Mao, Y.; Wang, L.; Zhang, C. Influence of ring deformation on the dynamic characteristics of a roller bearing in clearance fit with housing. Int. J. Mech. Sci. 2018, 138–139, 122–130. [Google Scholar] [CrossRef]
- Wang, M.; Yan, K.; Zhang, X.; Zhu, Y.; Hong, J. A comprehensive study on dynamic performance of ball bearing considering bearing deformations and ball-inner raceway separation. Mech. Syst. Signal Proc. 2023, 185, 109826. [Google Scholar] [CrossRef]
- Wang, M.; Yan, K.; Tang, Q.; Guo, J.; Zhu, Y.; Hong, J. Dynamic modeling and properties analysis for ball bearing driven by structure flexible deformations. Tribol. Int. 2023, 179, 108163. [Google Scholar] [CrossRef]
- Yao, T.; Chi, Y.; Huang, Y. Research on flexibility of bearing rings for multibody contact dynamics of rolling bearings. Procedia Eng. 2012, 31, 586–594. [Google Scholar] [CrossRef]
- Chen, G.; Wen, J. Load performance of large-scale rolling bearings with supporting structure in wind turbines. J. Tribol. 2012, 134, 041105. [Google Scholar] [CrossRef]
- Liu, X.; Niu, R.; Wang, B.; Zhang, S.; Cui, Y.; Zhang, Z. Crowning method on bearing supporting large wind turbine spindle considering the flexibility of structure of shaft system. Machines 2023, 11, 28. [Google Scholar] [CrossRef]
- ISO 281:2007; Rolling Bearings—Dynamic Load Ratings and Rating Life. International Organization for Standardization: Geneva, Switzerland, 2007.
- Lundberg, G.; Palmgren, A. Dynamic Capacity of Rolling Bearings. J. Appl. Mech. 1949, 16, 165–172. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Inner race diameter (mm) | 115 |
| Outer race diameter (mm) | 145 |
| Curvature coefficient of the inner raceway | 0.525 |
| Curvature coefficient of the outer raceway | 0.515 |
| Ball diameter (mm) | 9.525 |
| Ball number | 37 |
| Bearing width (mm) | 15 |
| Number of bolt holes | 16 |
| Pitch diameter (mm) | 130 |
| Pitch diameter of bolt hole (mm) | 175 |
| Left rib height of inner raceway (mm) | 3.746 |
| Right rib height of outer raceway (mm) | 4.319 |
| Bearing initial contact angel (°) | 40 |
| Component | Modulus of Elasticity E (GPa) | Poisson’s Ratio ν | Density ρ (kg/m3) |
|---|---|---|---|
| Planetary frame | 210 | 0.29 | 7850 |
| Inner and outer ring | 205 | 0.3 | 7806 |
| Ball | 203 | 0.29 | 7810 |
| Pin gear housing | 169 | 0.286 | 7120 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Liu, F. Study on Ring Deformation and Contact Characteristics of Thin-Walled Bearing for RV Reducer. Appl. Sci. 2024, 14, 3741. https://doi.org/10.3390/app14093741
Wang Y, Liu F. Study on Ring Deformation and Contact Characteristics of Thin-Walled Bearing for RV Reducer. Applied Sciences. 2024; 14(9):3741. https://doi.org/10.3390/app14093741
Chicago/Turabian StyleWang, Yanshuang, and Fangzheng Liu. 2024. "Study on Ring Deformation and Contact Characteristics of Thin-Walled Bearing for RV Reducer" Applied Sciences 14, no. 9: 3741. https://doi.org/10.3390/app14093741
APA StyleWang, Y., & Liu, F. (2024). Study on Ring Deformation and Contact Characteristics of Thin-Walled Bearing for RV Reducer. Applied Sciences, 14(9), 3741. https://doi.org/10.3390/app14093741