Abstract
As large-scale low Earth orbit (LEO) constellations continue to expand, the potential of their signal strength for positioning applications should be fully leveraged. For high-precision angle of arrival (AOA) estimation, current spectrum search algorithms are computationally expensive. To address this, we propose a method that downscales the 2D joint spectrum search algorithm by incorporating satellite ephemeris a priori information. The proposed algorithm efficiently and accurately determines the azimuth and elevation angles of NLOS (non-line-of-sight) signals. Furthermore, an NLOS virtual satellite construction method is introduced for integrating NLOS satellite data into the positioning system using previously estimated azimuth and elevation angles. Simulation experiments, conducted with a uniform planar array antenna in environments containing both LOS (line-of-sight) and NLOS signals, demonstrate the effectiveness of the proposed solution. The results show that the azimuth determination algorithm reduces computational complexity without sacrificing accuracy, while the NLOS virtual satellite construction method significantly enhances positioning accuracy in NLOS environments. The geometric dilution of precision (GDOP) improved significantly, decreasing from values exceeding 10 to an average of less than 1.42.
1. Introduction
With many large-scale low Earth orbit constellation projects launched, such as Iridium, SpaceX, OneWeb and Hongyan, LEO satellites have recently received a lot of attention for their prospects of augmenting the global navigation satellite system (GNSS). Traditional GNSS systems, which require users to receive signals from satellites in medium Earth orbit, have signal strengths of only −158.5 dBW when they reach the Earth. This means that the user must directly receive these signals to perform localization. However, LOS signal-dependent localization has notable limitations. In urban environments and areas with complex obstacles, severe signal degradation often occurs, making it difficult for the user to receive signals directly. Such signal unreliability significantly impairs positioning performance [1] and prevents GNSS from offering safe and reliable positioning services. In applications requiring high reliability, such as autonomous driving and UAV mission, these large positioning errors are unacceptable.
In the direction of NLOS virtual station constuction, Liu [2] proposed a virtual station localization method for joint time of arrival (TOA) and DOA in NLOS environments. The method constructs a virtual station by utilizing multiple reflected signals from a single base station, and the user’s location is obtained through a two-step least squares position estimation algorithm. Ma [3] employed an array antenna to distinguish between multipath signals, selecting the angle of arrival and distance information of the two strongest signals. A virtual base station is then established to convert NLOS paths into LOS paths, allowing for the calculation of the initial user position based on the virtual base station’s angle and distance information. Shen [4] applied matrix beam and matrix augmentation processing to measurement data from a uniform line array receiver, generating a virtual base station based on the known plan.
Deng [5] ranked base stations based on signal arrival time variance, selecting those with smaller variance for initial position computation using positive definite equations. Simultaneously, the pedestrian heading projection technique was employed to compute user positions in the first three steps. Following this, virtual base stations were constructed based on user positions from the first three steps, allowing LOS and virtual base stations to jointly participate in the positioning process. Truong [6] compared the performance of NLOS inversion algorithms by analyzing their mean square error and optimal Clamello lower bound. Tian [7] utilized the multipath properties of commodity WiFi signals to enhance indoor localization. First, the positions of the target and scatterers (e.g., furniture) were jointly estimated. Then, the difference in propagation time between reflected and direct paths was used to select the direct path as a reference, combined with the angle of arrival. Finally, a particle swarm optimization-based algorithm was developed to search for target and scatterer positions. Deng [8] first identified single reflected scattering signals from the same scatterer using angle of arrival and time of arrival measurements. The LOS positioning algorithm was then used to locate the scatterer, which was treated as a virtual station for user positioning. Behnia [9] addressed the challenge of NLOS paths by using angle of arrival and time of arrival estimations in a multi-reflectance NLOS environment, enabling time differences to be equivalently used in place of distance differences.
Numerous studies have concentrated on the development of robust algorithms and innovative methods to accurately estimate these parameters [10,11,12,13,14]. Zhang [15] developed a dimensionality-reducing MUSIC (Multiple Signal Classification) algorithm that simplifies azimuth estimation in a MIMO radar system by performing two one-dimensional searches, thereby avoiding the high computational cost of the 2D-MUSIC algorithm. Ma [16] introduces a sparse non-uniform matrix array using spatially extended electromagnetic vector sensors and proposes a dimensionality reduction method for estimating both the 2D direction of arrival and signal polarization. Based on the structure, accurate yet ambiguous directional cosine estimates are first obtained. These estimates are refined by extracting guiding vectors from the array manifolds, and a de-blurring method is applied to achieve precise 2D direction of arrival and polarization estimates. Hussain Ali [17] proposes a reduced-dimensional, low-complexity algorithm to estimate the direction of arrival, direction of departure, and Doppler shift of a moving target in MIMO radar systems. Two cost functions are derived from distinct objective functions and solved in 3D space using a low-complexity FFT method, which is further reduced to a 2D search. Another dimensionality reduction algorithm using the generalized eigenvalue method estimates unknown parameters in 1D space, minimizing memory requirements. He [18] proposed a RD-MUSIC algorithm utilizing a polarization-sensitive array. The direction of arrival and polarization information of the source signal can be obtained simultaneously using a polarization-sensitive array. The RD-MUSIC algorithm estimates the two-dimensional direction of arrival without the need to jointly calculate the polarization parameters. Zhang [19] proposes a method for non-correlated MIMO scenarios, where the large covariance matrix is reduced in size through redundancy reduction, preserving angular information. The resulting conversion matrix enables efficient 2D angle estimation on a reduced problem scale. Ma [20] proposed a one-snapshot MUSIC algorithm derived from channel reconstruction, which addresses matrix rank insufficiency and reduces complexity while maintaining satisfactory accuracy compared to traditional 2D-MUSIC. Hou [21] demonstrated that paths with significant power can have their orientation and gain reconstructed for millimeter-wave channel estimation, utilizing spatial sparsity caused by propagation losses. Based on this property, a two-dimensional beam spatial direction estimation method was developed, which estimates both departure and arrival angles, and pairs them using a reduced-dimension MUSIC algorithm.
LEO satellites have significantly higher signal strength than conventional GNSS satellites due to their lower orbital altitude. This advantage not only enhances signal availability but also allows for the possibility of utilizing NLOS signals for positioning. However, the propagation of distance errors between NLOS and direct-beam signals can result in significant positioning errors, with NLOS errors reaching tens or even hundreds of meters [22].
In the context of NLOS positioning, researchers have proposed several solutions to mitigate the adverse effects of NLOS signals. One of the more classical approaches is to classify signals as either LOS or NLOS, thereby excluding NLOS signals and using only LOS signals for positioning [23]. However, this method has significant drawbacks when there are insufficient available signals. To address these limitations, researchers have explored alternative methods. One approach involves using a fisheye camera mounted on the user device, which captures images pointing towards the sky to detect NLOS signals [24,25]. Another method employs 3D LiDAR [26], which corrects for NLOS propagation based on the distances to surrounding buildings obtained from scans and NLOS propagation models. However, both of these methods consume a large amount of power, making them unsuitable for devices that are sensitive to power consumption. Additionally, researchers have developed three-dimensional map-assisted (3DMA) GNSS positioning algorithms that use ray-tracing techniques to detect and correct reflections from NLOS and multipath propagation [27], providing a positioning accuracy within about 10 m or less.
This study focuses on addressing the challenges of utilizing NLOS signals for precise positioning in urban environments. By leveraging the classical MUSIC algorithm, we propose an innovative approach to invert NLOS signals and generate virtual satellite configurations, enabling the effective use of otherwise obstructed satellite signals. Notably, our methodology requires only a single receiver and eliminates the need for additional sensors such as fisheye cameras or LiDAR. To address the high computational costs traditionally associated with MUSIC, we incorporate satellite ephemeris as a priori information to reduce the dimensionality of the spectral search, significantly improving the algorithm’s efficiency while maintaining accuracy. This integrated methodology not only advances the application of NLOS signals in positioning systems but also provides a computationally efficient solution that minimizes hardware complexity and power consumption, making it highly suitable for resource-constrained environments. Comprehensive validation demonstrates the proposed method’s potential to transform urban satellite positioning and signal processing practices (Table 1).

Table 1.
Comparison of different methods’ limitations for NLOS positioning.
2. System Model
2.1. GDOP Criterion
In this section, we describe the details of the GDOP [28]. To determine the GDOP, we first define a measured distance, called pseudorange, as follows:
is estimated by compensating for satellite clock error and residual errors as much as possible. represents a comprehensive impact of residual errors, and represents the time bias of the user receiver relative to true GPS time (GPST), where c denotes the speed of light.
Let and be the vectors representing the location of the receiver and the satellite at the time of measurement and signal emission, respectively, where . The true range between the receiver and the satellite is then given by
Thus,
where b is a parameter that accounts for the receiver clock bias .
We can write and , denoting and as the corrections to the initial estimates. We can then set up a linear system of equations to solve for and .
We use the Taylor series expansion to approximate the vector form of the equations. In Equation (4), denotes the unit vector pointing from the receiver’s initial estimated position to the satellite, and each component of is the direction cosine of the vector from the receiver’s estimated position to the satellite direction.
There are four unknowns in the K (at least four) linear equations: and . Moreover, Equation (6) can be reduced to
Ideally, measurement errors in positioning systems can be characterized by their mean vector and covariance matrix. This statistical approach allows for calculating the minimum mean square error position estimate and determining position error variance. However, precisely describing measurement errors is typically challenging. For practical purposes, researchers often simplify the model by assuming satellite measurement errors are zero-mean, uncorrelated, and homoscedastic. Under these simplified conditions, Equation (1) can be expressed as follows:
where denotes the mean or expected value, represents the covariance, I is the identity matrix, and is the standard deviation of the user range error (URE) common to each satellite, which is simplified as . URE encompasses errors from satellite ephemeris and clock inaccuracies, signal propagation effects (ionospheric and tropospheric residuals), and receiver-induced uncertainties (multipath and measurement noise), collectively impacting the precision of satellite-based positioning systems.
The quality of position estimation is described based on the receiver-to-satellite geometry matrix . The covariance matrix is
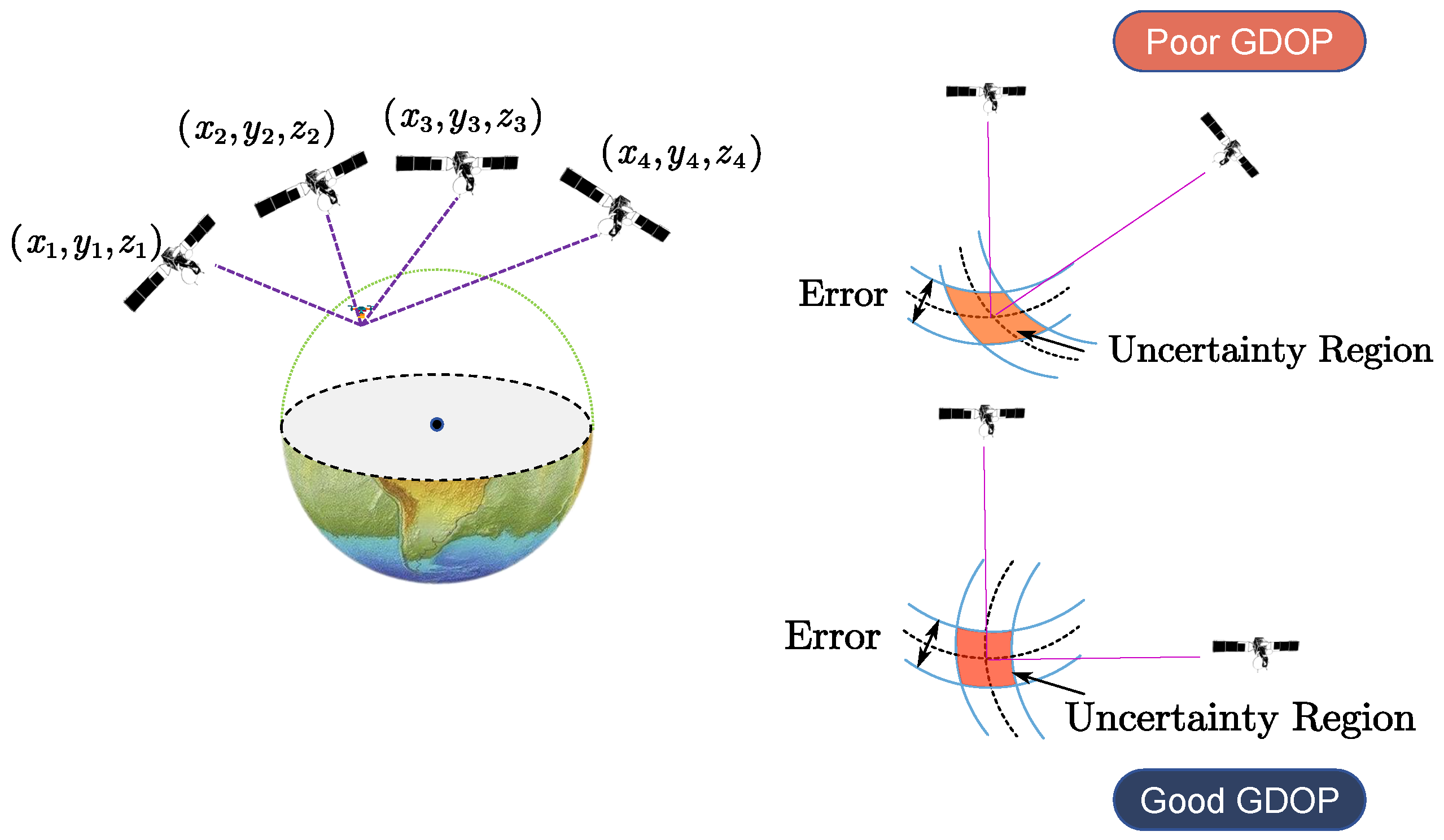
The variances of the position errors in x, y, and z directions are denoted by , and , respectively, with the variance of the clock bias estimates represented by . Let , where represents the element on the diagonal of the matrix , providing a systematic approach to characterizing positional uncertainty and measurement error covariance. Then, GDOP is defined as follows (Figure 1):
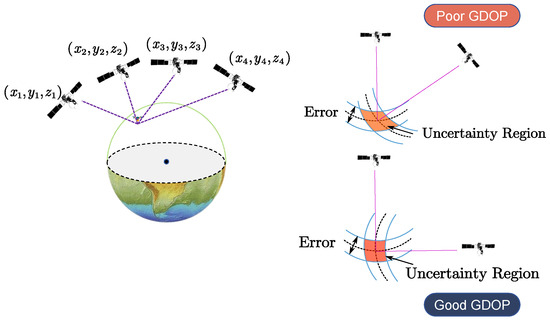
Figure 1.
Visual representation for GDOP [29].
2.2. MUSIC Algorithm
When considering a typical LEO Ka-band signal with a bandwidth of 3.5 GHz and a center frequency f exceeding 26.5 GHz, the incident signal source can be modeled as a far-field narrowband signal. Its complex envelope can be expressed as follows:
In Equation (12), represents the amplitude of the far-field source, while denotes the angular frequency of the received source, and is its phase. In the study of antenna array-based AOA estimation algorithms, the primary focus is on the effect of the time delay on the incident signal source. When the incident signal experiences a time delay , its expression is given as follows:
Given that the incident signal source is a narrowband far-field source with an effective bandwidth much smaller than the center frequency f, both and vary at a relatively slow rate over time. Under this condition, after a small time delay , the equivalent expression can be written as follows:
Based on the expression in Equation (15), it can be concluded that the propagation of a far-field narrowband signal source with a small time delay between different elements of an antenna array can be equated to a phase shift in the target signal. In contrast, the variation in the signal source amplitude across the array elements is negligible and can be treated as a constant. This key conclusion simplifies the signal reception model for far-field narrowband sources. Specifically, when the sensor array elements are arranged in a particular configuration, target signals from different incidence angles induce phase differences between the array elements. By applying suitable techniques to extract these phase differences, the performance parameters of the target signal source can be accurately obtained, thus enabling effective estimation of the target signal source parameters.
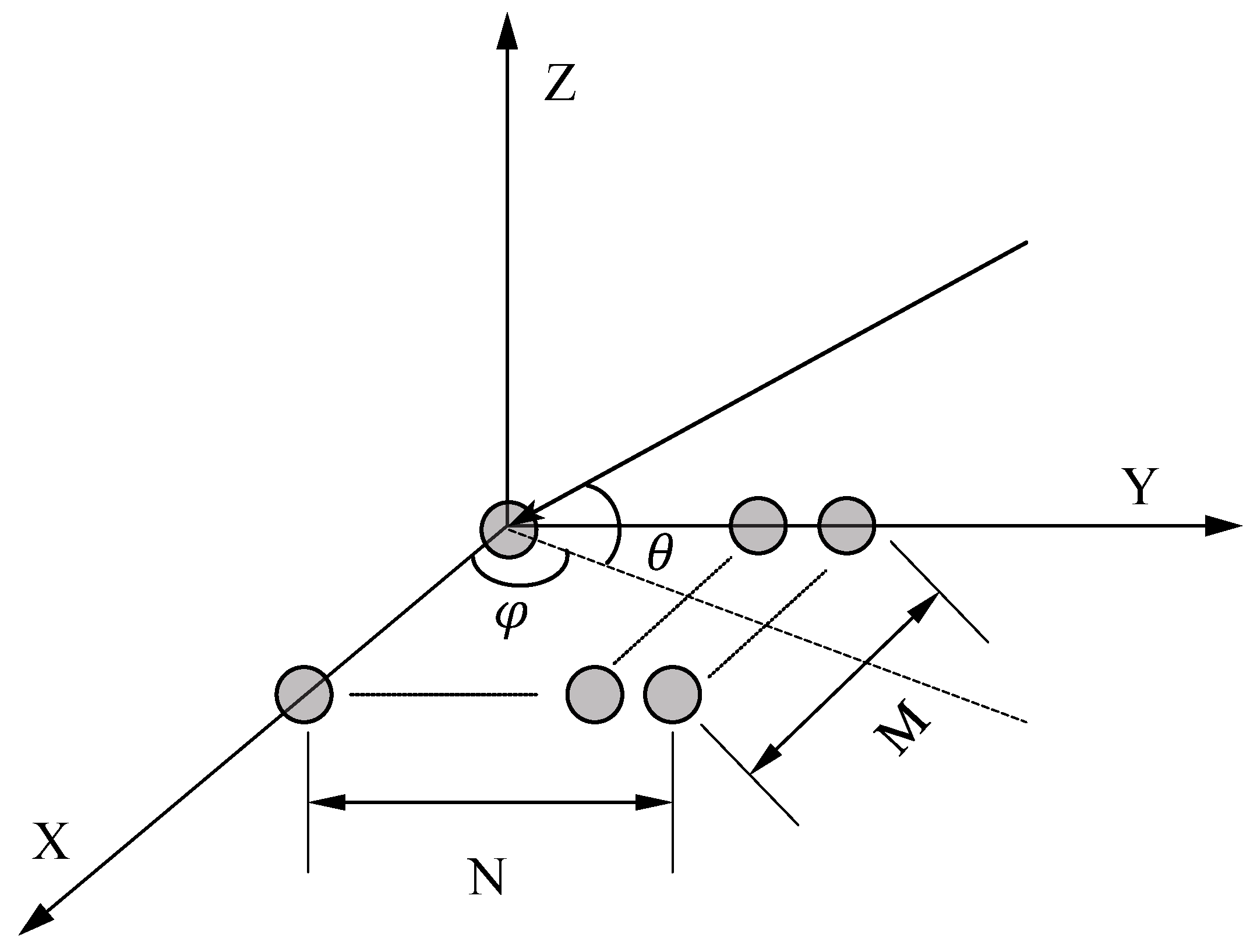
Consider a uniform surface array antenna commonly used for LEO satellites. The receiving system consists of a single-channel receiver and an array of strip dipole antennas, each operating at half the wavelength. Only one antenna is connected to the receiver at any given time. These antennas are uniformly distributed with a spacing of to form a planar array, where represents the wavelength of the incident signal.
Assume that K uncorrelated narrowband signals are incident on the array plane from space at two-dimensional angles for . Here, and represent the elevation and azimuth angles of the kth incident signal, respectively, as shown in Figure 2.
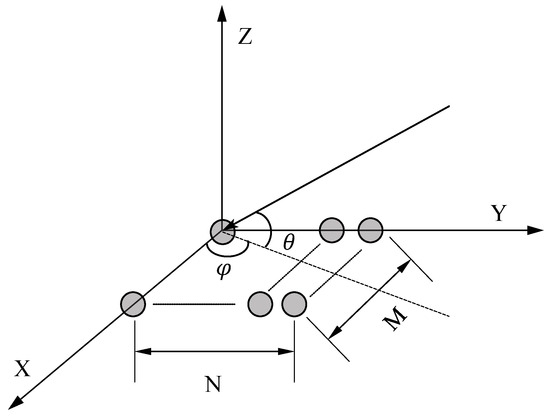
Figure 2.
Diagram of signal incidence on an antenna array.
Based on the described array structure, the output of an individual array element can be expressed as
In this equation, the parameters are defined as follows:
- denotes the signal received by the kth signal wave at the array element with sequence number m in the x-axis and n in the y-axis (Equation , ).
- denotes the attenuation factor or received gain of the array element with x-axis sequence number m and y-axis sequence number n for the kth signal.
- is the kth signal when it arrives at the antenna array. The signal frequency is , and the signals are non-coherent.
- denotes the delay of the kth signal in the x-axis sequence numbered m and the y-axis sequence numbered n with respect to the origin reference array element.
- denotes the noise sample of the th antenna at time t. It has amplitude 1, mean 0, and follows a circularly symmetric complex normal distribution with variance , and is additive Gaussian white noise.
Based on the above signal model, the signal delay can be expressed as follows:
Let represent the direction vector corresponding to the kth source. The outputs of all array elements can be expressed in vector form, where the vector of received signals at the outputs of the antenna array is given by
defined as
The spatial correlation matrix of the array output is widely utilized for direction of arrival estimation, as it encapsulates the necessary information about the received signal. According to Equation (18), the spatial correlation matrix of the received signal, including noise, can be expressed as
where is the statistical expectation operator, the superscript denotes the complex conjugate transpose operation, and is the element of the ith row of the jth column.
After applying the expectation operator, Equation (20) can be rewritten as
The task now focuses on estimating the azimuth and elevation angles (i.e., and ) between the center of the receiving system and the signal source, using the correlation matrix of the receiving system as the available data. The correlation matrix can be unbiasedly estimated using the sample correlation matrix.
where O denotes the number of independent observations, also referred to as the number of snapshots.
When the number of matrix elements exceeds the number of signals K, the rank of the signal component in the covariance matrix equals K. By performing eigen-decomposition on , we obtain
where is a diagonal matrix whose diagonal elements represent the largest K eigenvalues in magnitude, and is a diagonal matrix containing the smallest eigenvalues. is the matrix formed by the eigenvectors corresponding to the largest K eigenvalues of , while consists of the eigenvectors associated with the remaining eigenvalues. It is important to observe that and correspond to signal and noise subspaces, respectively, and the direction vectors of the signal and noise subspaces are orthogonal to each other.
Therefore, the MUSIC algorithm scans all possible angles and generates the spatial spectrum:
The values of and that maximize the spatial spectral function correspond to the elevation and azimuth angles of the signal source.
3. Method
As in Table 2, the azimuth and elevation angles considered are , , , and . The number of array elements is 8 along both the X-axis and Y-axis, with an element spacing of . The number of snapshots, O, is set to 50, and the angular resolution is considered at both and . The signal-to-noise ratio (SNR) is 20 dB [30]. A total of 1000 Monte Carlo simulations were conducted using the 2D-MUSIC algorithm, and the results of a typical search are shown in Figure 3a.
Table 2.
Parameters for simulated MUSIC angle search.
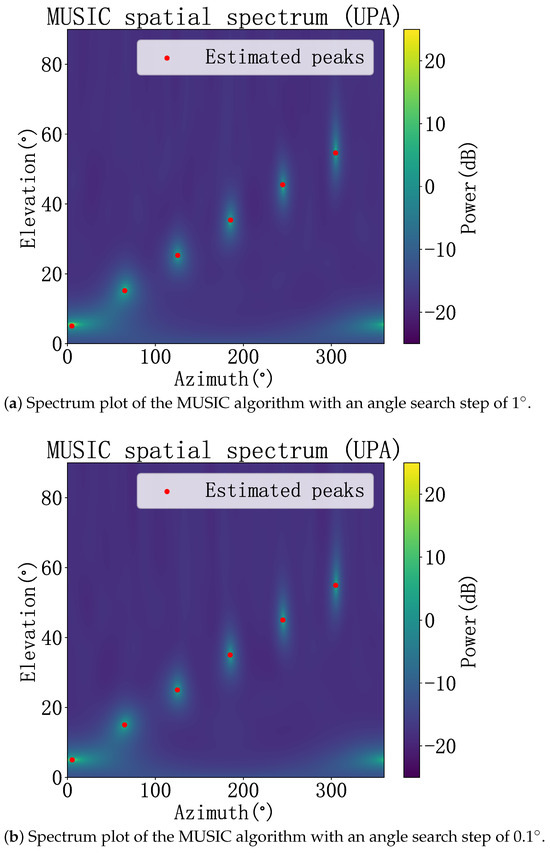
Figure 3.
Spectrum plot of the MUSIC algorithm with different angle search steps.
By analyzing the elevation and azimuth search results of the MUSIC algorithm in Table 3 and Table 4 under different angular search steps, the following conclusions can be drawn. Decreasing the angular search step from to substantially reduces the average error, particularly for larger elevation and azimuth angles. As the elevation angle increases, the search error also increases, whereas the azimuth search error tends to reach its maximum at intermediate angles. At a search step of , the algorithm demonstrates stable performance, with the average error generally remaining below . Overall, the azimuth search exhibits slightly smaller mean error compared to the elevation search. These results indicate that the MUSIC algorithm provides excellent angle estimation performance under high-precision conditions. However, achieving real-time performance with high-precision searches poses a significant challenge due to the increased computational demands.
Table 3.
Search results when the angle search step is .
Table 4.
Search results when the angle search step is .
The traditional MUSIC algorithm necessitates a two-dimensional search across a predefined grid space to identify the local maxima of the objective function. At each grid point, the values of the function are computed and stored, followed by the identification of peaks. High-resolution methods, such as MUSIC, typically generate extremely sharp peaks (see Figure 3a,b), which requires fine grid spacing to ensure accurate peak detection. However, this small grid spacing substantially increases both computational and memory requirements. The performance of the conventional MUSIC algorithm is critically sensitive to the selection of search parameters. Suboptimal choices of search range and resolution can lead to significant estimation errors, fundamentally compromising the algorithm’s ability to accurately determine signal direction of arrival. The precision of angle estimation is directly tied to the comprehensiveness of the angular search space, introducing inherent limitations in the algorithm’s reliability and effectiveness.
The computational complexity of generating a two-dimensional spectral model is given by
where O represents the number of snapshots, and M and N are the number of antennas in the two respective directions.
The complexity involved in searching the two-dimensional spatial spectrum model is
where and correspond to the number of search points for the elevation and azimuth angles, respectively. The computational complexity for the specific execution of the two graphs shown in Figure 3a,b was evaluated using simulated hardware configurations on an Intel(R) Core(TM) i5-12400F CPU operating at 2.50 GHz, equipped with 16 GB of RAM. The results are presented in Table 5.
Table 5.
Complexity of the MUSIC algorithm under different angle search steps.
The results demonstrate that the overall computational complexity is significantly influenced by the accuracy of the angular search. To reduce angular estimation errors, a substantial computational cost must be incurred. For scenarios requiring both high accuracy and real-time performance, it is essential to optimize the MUSIC algorithm to make it feasible for practical localization applications.
3.1. Reduced-Dimension MUSIC Algorithm Based on Ephemeris Information
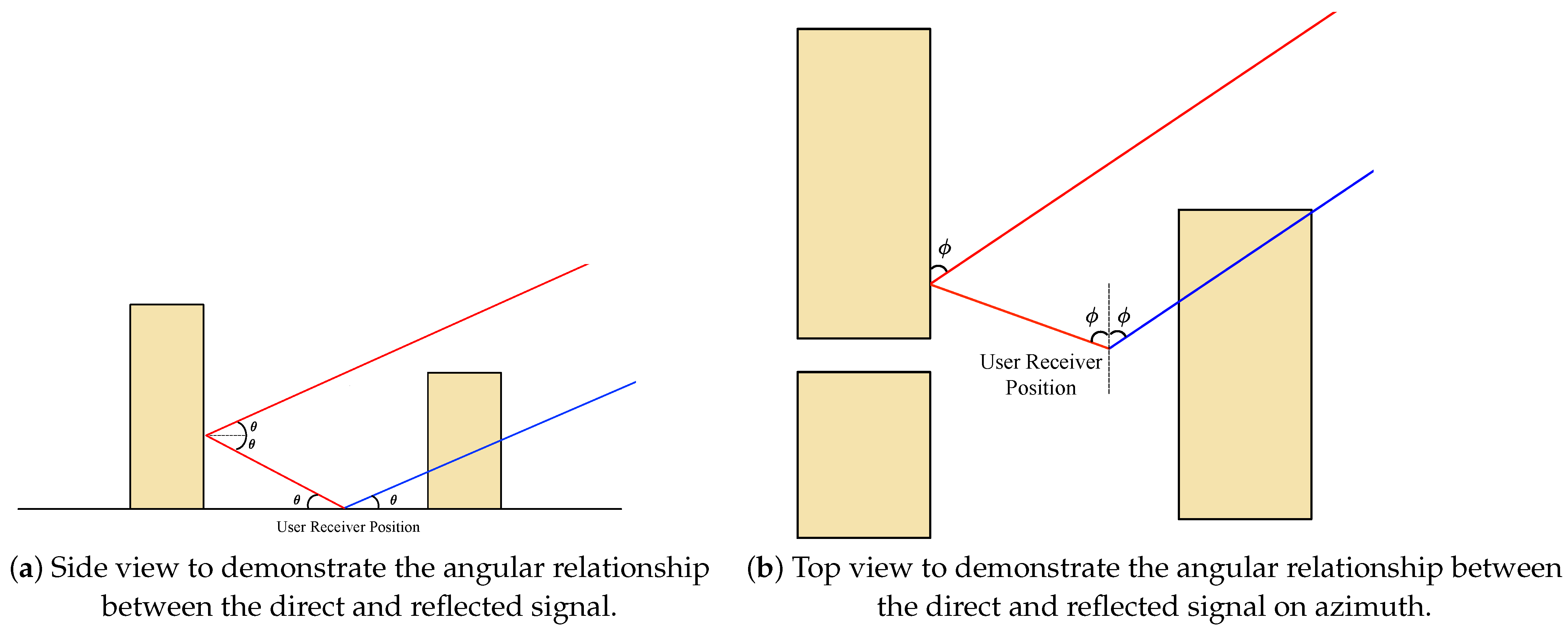
To estimate the elevation and azimuth angles of the signal source in each assumed position, this section proposes utilizing the characteristic of perfect reflection, where the incident angle equals the reflection angle. As shown in Figure 4a, if the reflecting surface is vertical, the satellite elevation angle at the receiver is the same as the satellite elevation angle at the reflecting point, due to the satellite’s distance from both the reflecting point and the receiver. According to the law of reflection [22], the incident angle equals the reflection angle, which is the elevation angle at the reflection point.
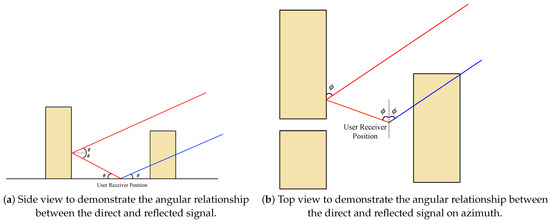
Figure 4.
View to demonstrate the angular relationship between the direct and reflected signal. Red and blue line represent reflect and direct paths, respectively.
On the other hand, from the receiver’s azimuth perspective, the reflection surface is parallel to the direction of travel, and the azimuth angle of the reflection point relative to the direction of travel is equal and opposite to the azimuth angle of the satellite relative to the direction of travel. As shown in Figure 4b, without prior information, such as 3D maps, it is not possible to quickly infer the azimuth angle using ephemeris data, so the MUSIC algorithm must still be employed to obtain the azimuth angle.
Assume that the distance between the satellite and the user is and that the elevation angle between the user and the satellite is . The reflecting surface is located 100 m in front of the user. Moreover, at this time, , resulting in an angular error below . When the elevation angle is , , and the angular error remains below .
Therefore, the user can directly determine the elevation angle information of one reflected signal using satellite ephemeris. In turn, the geometric relationship between the direct and reflected waves, along with the a priori information, is utilized to continue the dimensionality reduction process and reduce the computational complexity of the algorithm.
After obtaining K elevation angle values, it is straightforward to derive K azimuth angles. This is achieved by substituting the elevation angle estimates into the spectral function and performing another one-dimensional search, thereby completing the task.
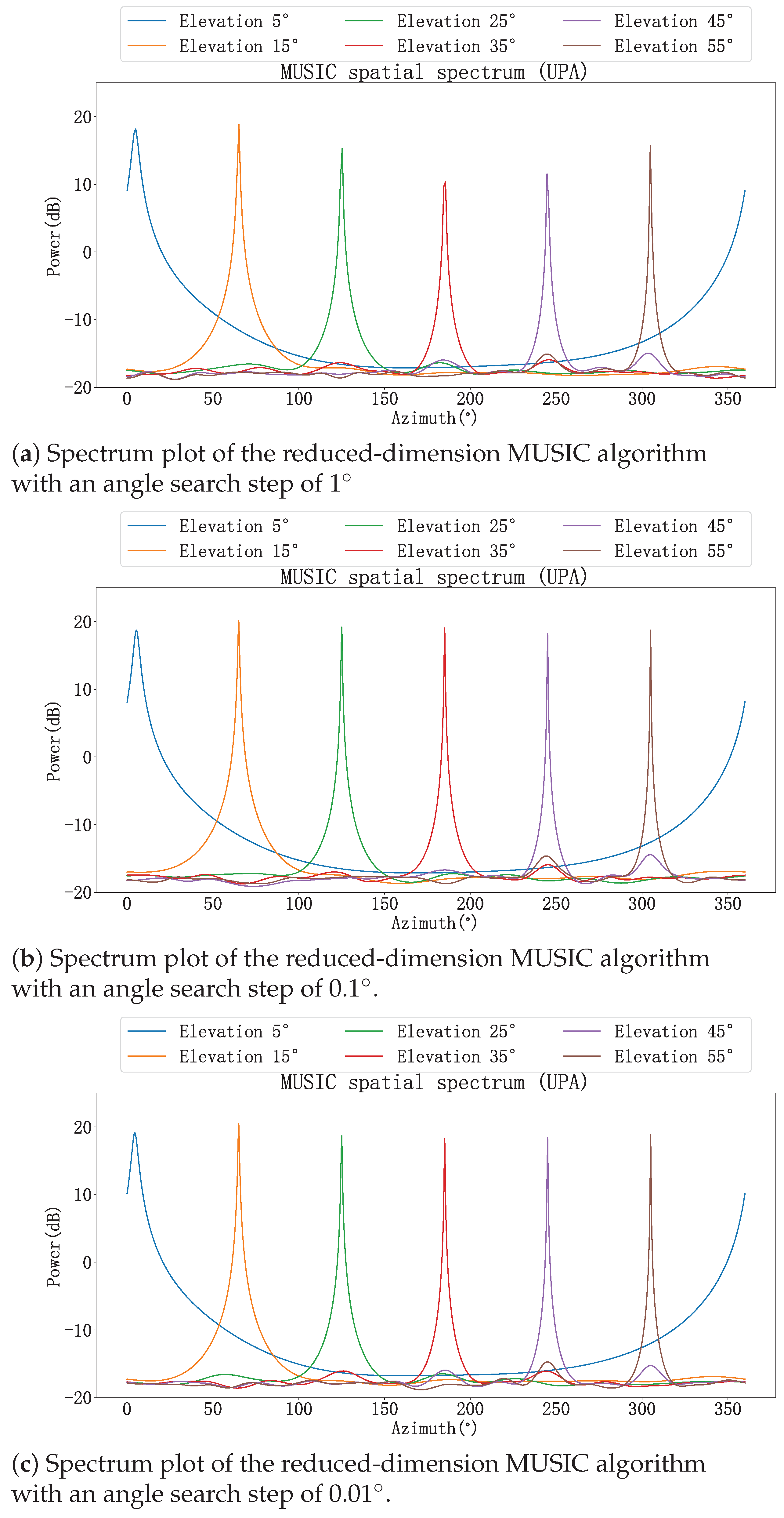
As shown in Table 6 and Table 7 and Figure 5, reducing the angular search step size significantly enhances the algorithm’s angular accuracy. When the search step is reduced from to , the average error decreases markedly, particularly in mid-range angles such as and . However, further increasing the precision to results in diminishing returns, offering only marginal improvements. It is also worth noting that the algorithm performs variably across different azimuths, with smaller errors observed near and (e.g., and ), while larger errors occur in the intermediate angular ranges.
Table 6.
Parameters for simulated reduced-dimension MUSIC angle search.
Table 7.
Search results when the angle search step is .
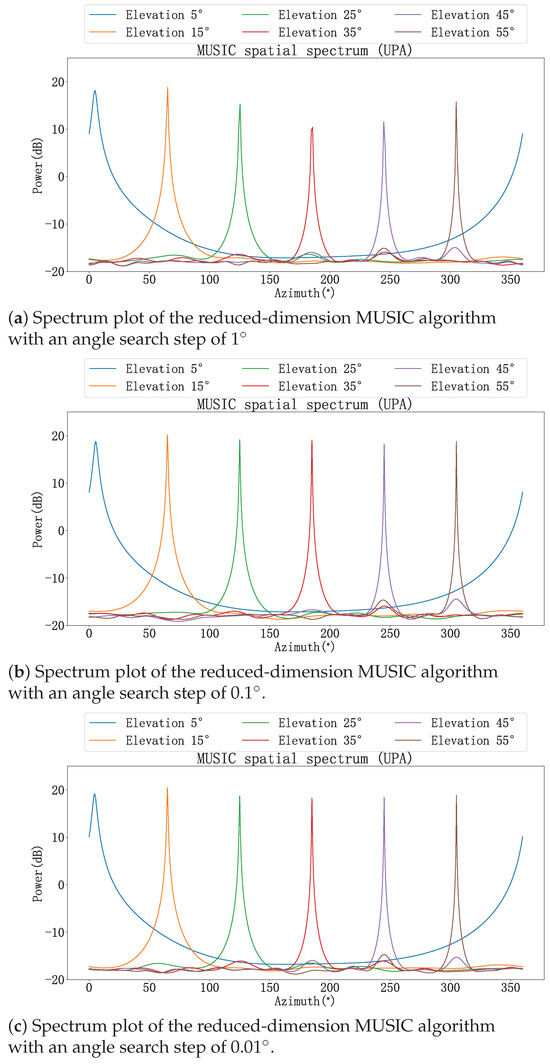
Figure 5.
Spectrum plot of the reduced-dimension MUSIC algorithm with different angle search step.
The number of computations required for searching the dimensionality-reduced spatial spectrum model is shown in Table 8.
Table 8.
Complexity of the reduced-dimension MUSIC algorithm under different angle search steps.
In practical applications, the azimuth search step size can be adjusted dynamically to balance angular accuracy and computational efficiency based on the number of received NLOS elevation signals. This adaptive approach can significantly improve the final azimuth accuracy while keeping computational complexity and runtime within acceptable limits. For applications with fewer NLOS signals, a smaller search step can be adopted to enhance accuracy. Conversely, systems handling a greater number of NLOS signals and requiring higher real-time performance may opt for a larger search step as a trade-off between precision and computational demand.
3.2. The Construction of Virtual Satellite
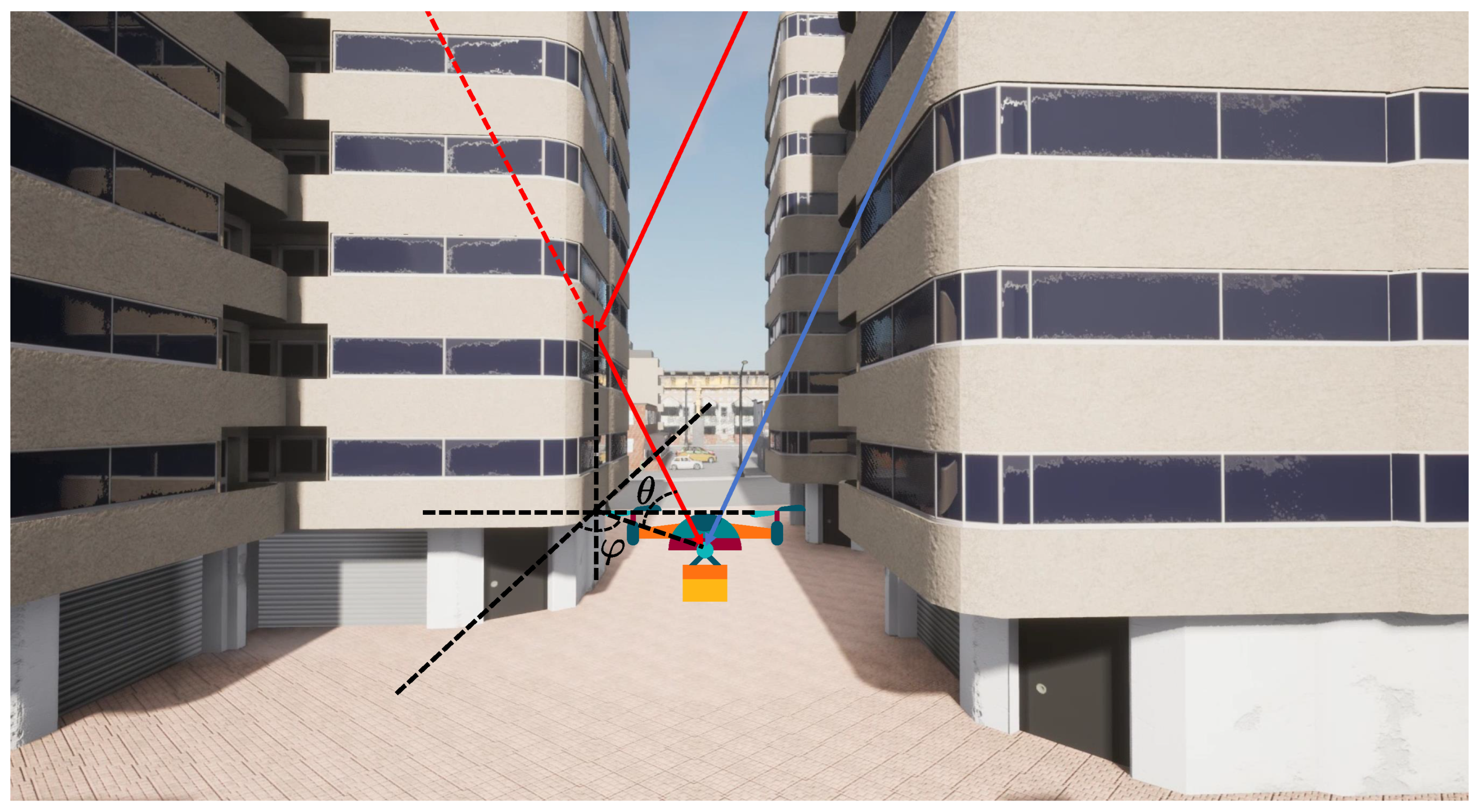
As shown in Figure 6, in environments with dense obstacles or buildings, NLOS wireless propagation between the satellite and the user is common, which can cause significant degradation in localization accuracy. The virtual satellite method addresses this issue by first identifying the reflection point in the NLOS environment. The extension line between the user and the reflection point is then treated as the signal’s incident direction, and the pseudo-distance measured by the user is taken as the distance between the virtual site and the user’s location. This effectively transforms the NLOS localization problem into a LOS problem. By fully leveraging the additional information provided by the reflection points, this method significantly improves localization performance in environments with obstacles.
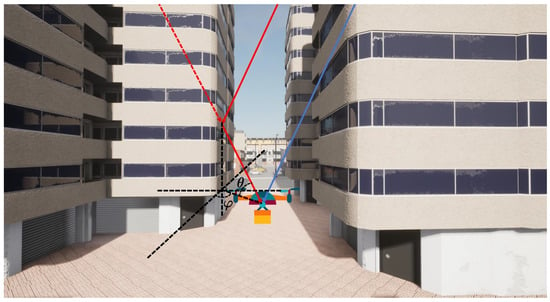
Figure 6.
NLOS virtual satellite inversion diagram: Red lines represent NLOS paths, blue lines represent unavailable LOS paths, and dashed lines represent direct paths of NLOS inverted virtual satellites.
In any virtual satellite method, accurately localizing reflection points is crucial. The virtual base station method achieves this by constructing virtual satellites through mirroring NLOS satellites on reflective surfaces, such as building walls. These virtual satellites can be treated as LOS satellites for user terminals, ensuring that a sufficient number of satellites are available for accurate positioning.
Signal measurements can be classified into LOS and NLOS categories based on the received signal strength. For multiple NLOS signal peaks, the proposed virtual satellite inversion method only considers perfectly reflecting surfaces (i.e., those perpendicular to the ground where the signal’s angle of incidence matches the elevation angle of the satellite, based on the user’s ephemeris information). By leveraging pseudo-ranges derived from NLOS reflection errors, this method eliminates the need to separately correct the extended pseudo-ranges caused by NLOS propagation. As a result, the virtual satellite’s position can be directly established. The detailed process is as follows:
- NLOS Reflected Signal Recognition: Signal-to-noise ratio (SNR) calculations are used to identify reflected NLOS signals based on a predefined threshold, distinguishing them from LOS (line-of-sight) signals.
- DOA Estimation Preparation: The covariance matrix () of the received signal data are calculated. Then, a feature decomposition is performed, separating the signal and noise subspaces.
- Spatial Spectrum Construction: A spatial scanning spectrum is constructed by exploiting the orthogonality between the signal direction vector and the noise subspace.
- Ephemeris Information Acquisition: Satellite ephemeris data are received and analyzed to extract important satellite elevation angle information.
- Two-Dimensional Spectrum Downscaling: The satellite ephemeris data are used to downscale the 2D spatial spectrum to a 1D spectrum by matching the elevation angle of the perfect reflection.
- Azimuth Search: A search is conducted in the 1D spectrum for spectral peaks to obtain azimuth angle information.
- Incidence Direction Inversion: The matched elevation and azimuth information is combined to calculate the signal’s direction of incidence.
- Virtual Satellite Construction: A virtual satellite is generated using the signal’s pseudo-range and the calculated incidence direction, treating it as if it were an LOS satellite.
- Positioning Calculation: The final step involves using the information from the virtual satellite to perform the positioning algorithm and output the positioning result.
4. Simulation Result Analysis and Discussion
A simulation analysis was conducted to assess the proposed algorithm’s effectiveness in enhancing localization accuracy in satellite occlusion environments, using data from 12,000 satellite observation scenarios. In the simulation, the elevation angle of user-observed satellites is limited to in urban environments, using a antenna array to receive NLOS signals. NLOS virtual satellite inversions are simulated by adding random azimuth variations between and to the retained satellites, modeling reflection-induced azimuth changes. The simulations compare the performance of the quasi-optimal algorithm with the GDOP method. This setup evaluates the algorithm’s performance in complex occlusion environments to validate its effectiveness in enhancing localization accuracy under NLOS conditions. The detailed configuration of simulated LEO constellations is shown in Table 9.
Table 9.
The detailed configuration of simulated LEO constellations.
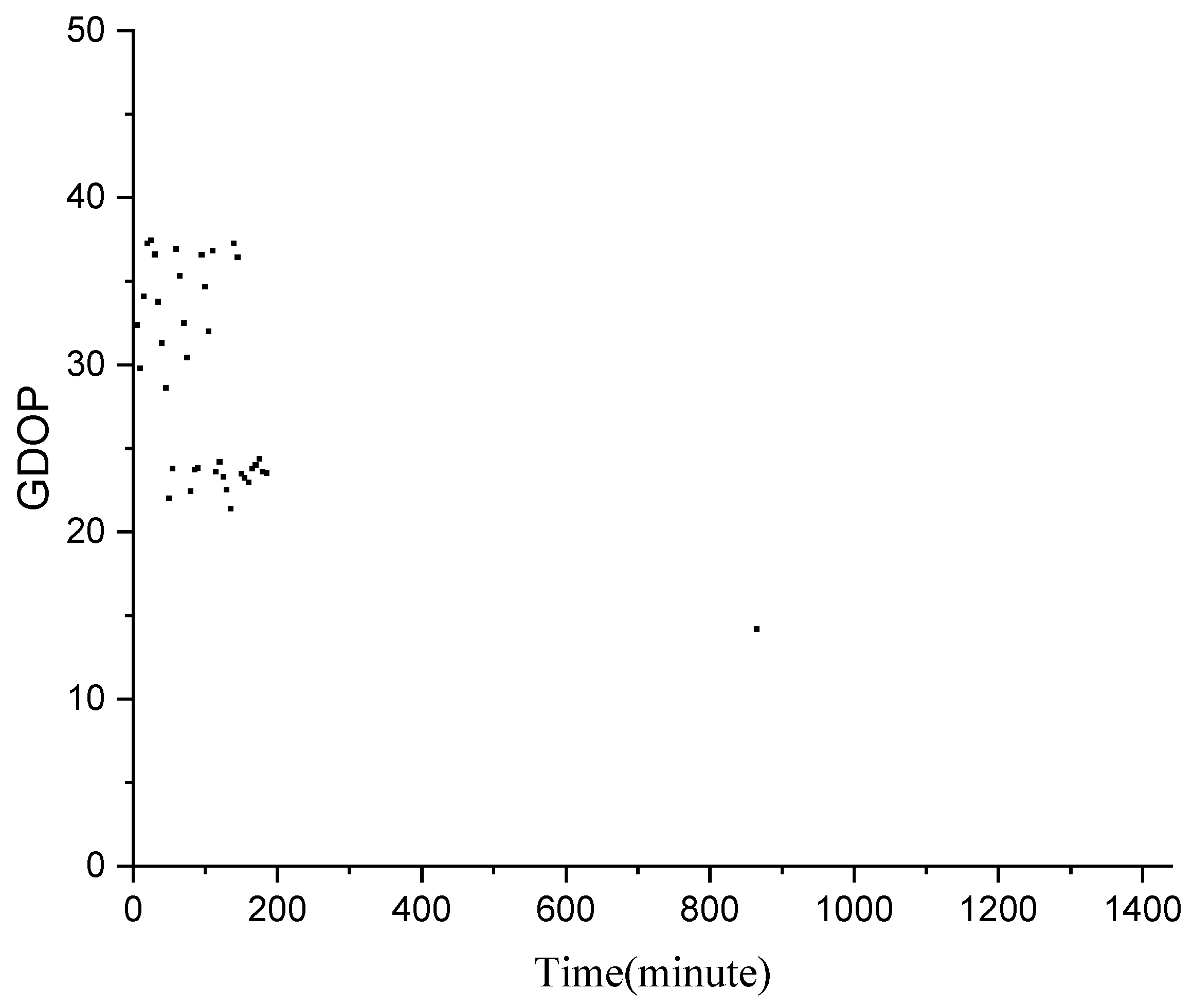
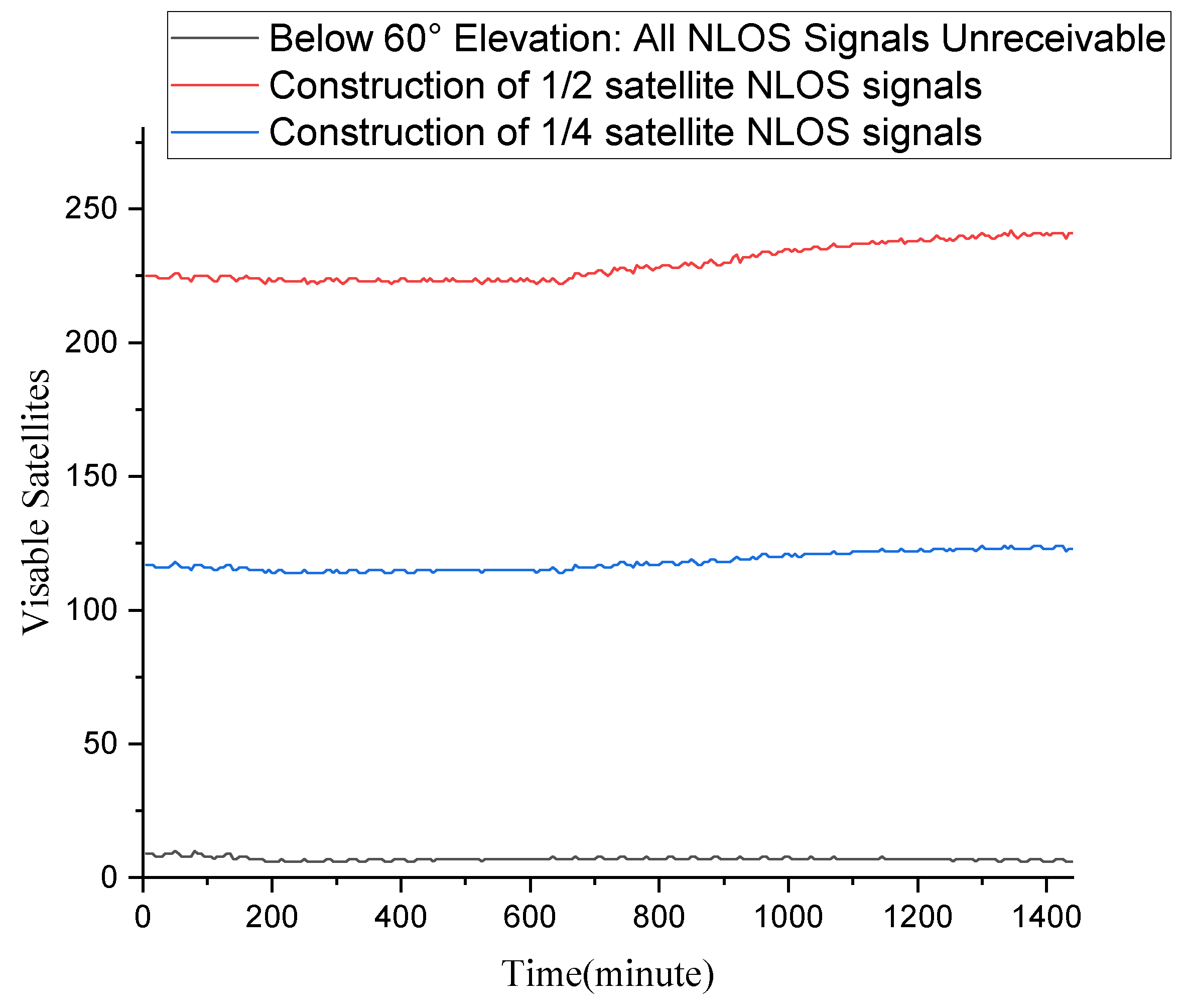
As shown in Figure 7 and Figure 8, in terms of visible satellites, the recovery of NLOS satellites greatly enhanced system performance. Without NLOS satellite recovery, the average number of visible satellites was 7, fluctuating between 6 and 10. In a simulation system with a constellation of 12,000 satellites, such a limited number of visible satellites could potentially drop below 4, rendering positioning impossible. Moreover, without virtual satellite generation, the GDOP remains consistently above 10 throughout the day, with extended periods exceeding 50, resulting in positioning errors of hundreds of meters. With half of the NLOS satellites recovered, the average number of visible satellites surged to 229, and with a quarter recovered, it increased to 118. These results suggest that even partial recovery of NLOS satellites can greatly expand the number of satellites available for positioning, significantly improving both accuracy and reliability. These findings demonstrate the substantial potential of NLOS satellite recovery strategies in complex environments.
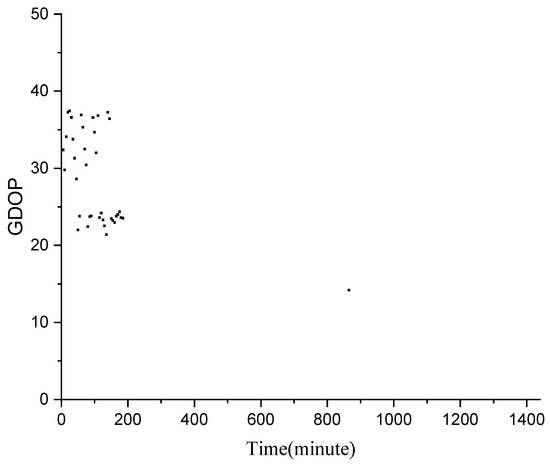
Figure 7.
GDOP scatter plot at different times under the condition of no virtual satellites below 60° NLOS.
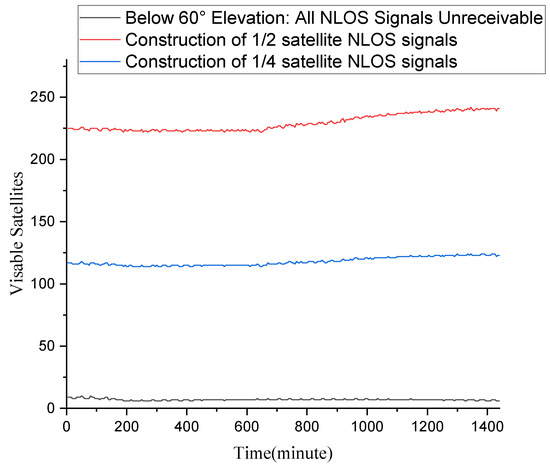
Figure 8.
Number of observable satellites under different virtual satellite settings below 60° NLOS condition: no virtual satellites, half of the satellites are set as virtual, one-quarter of the satellites are set as virtual.
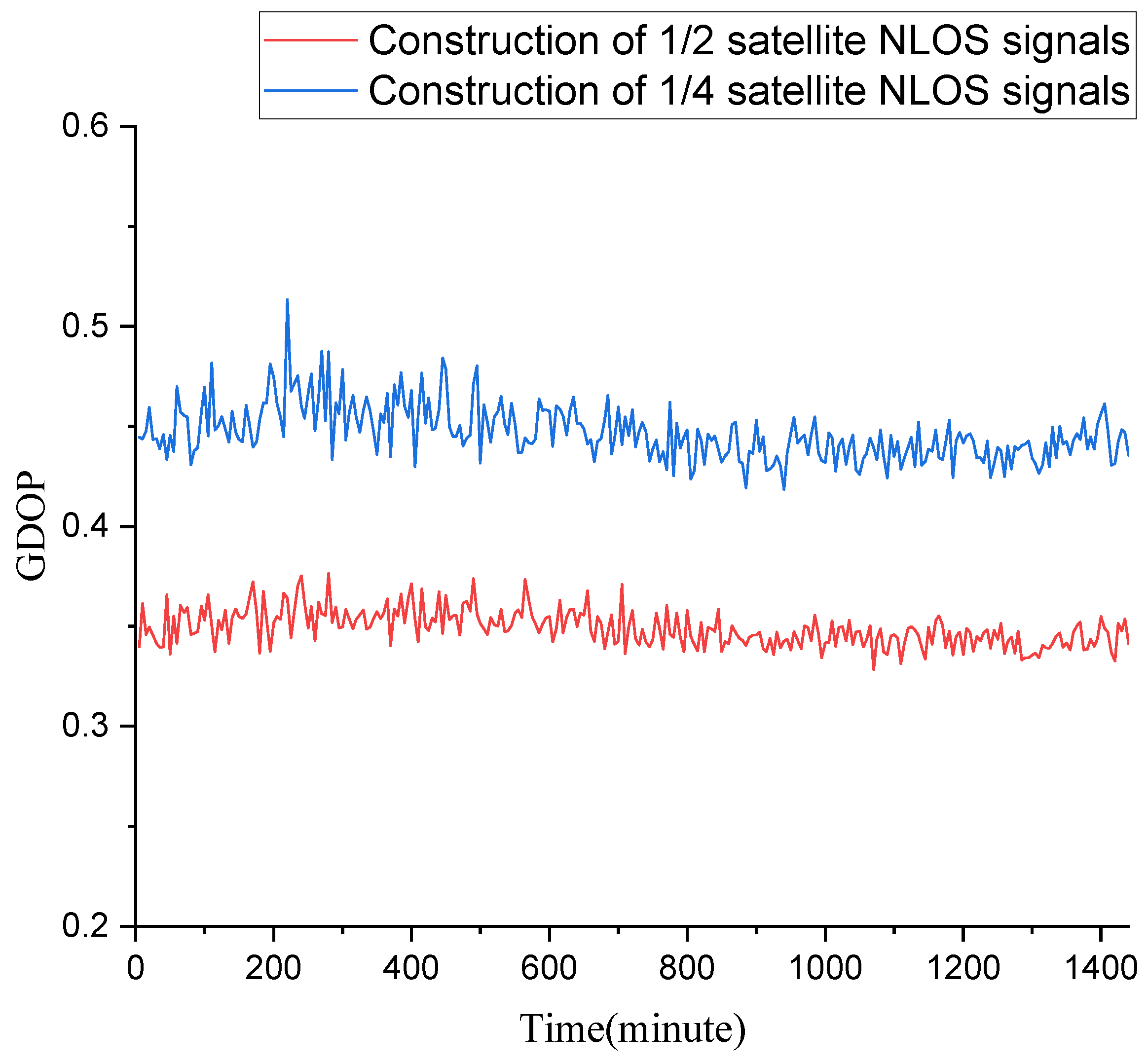
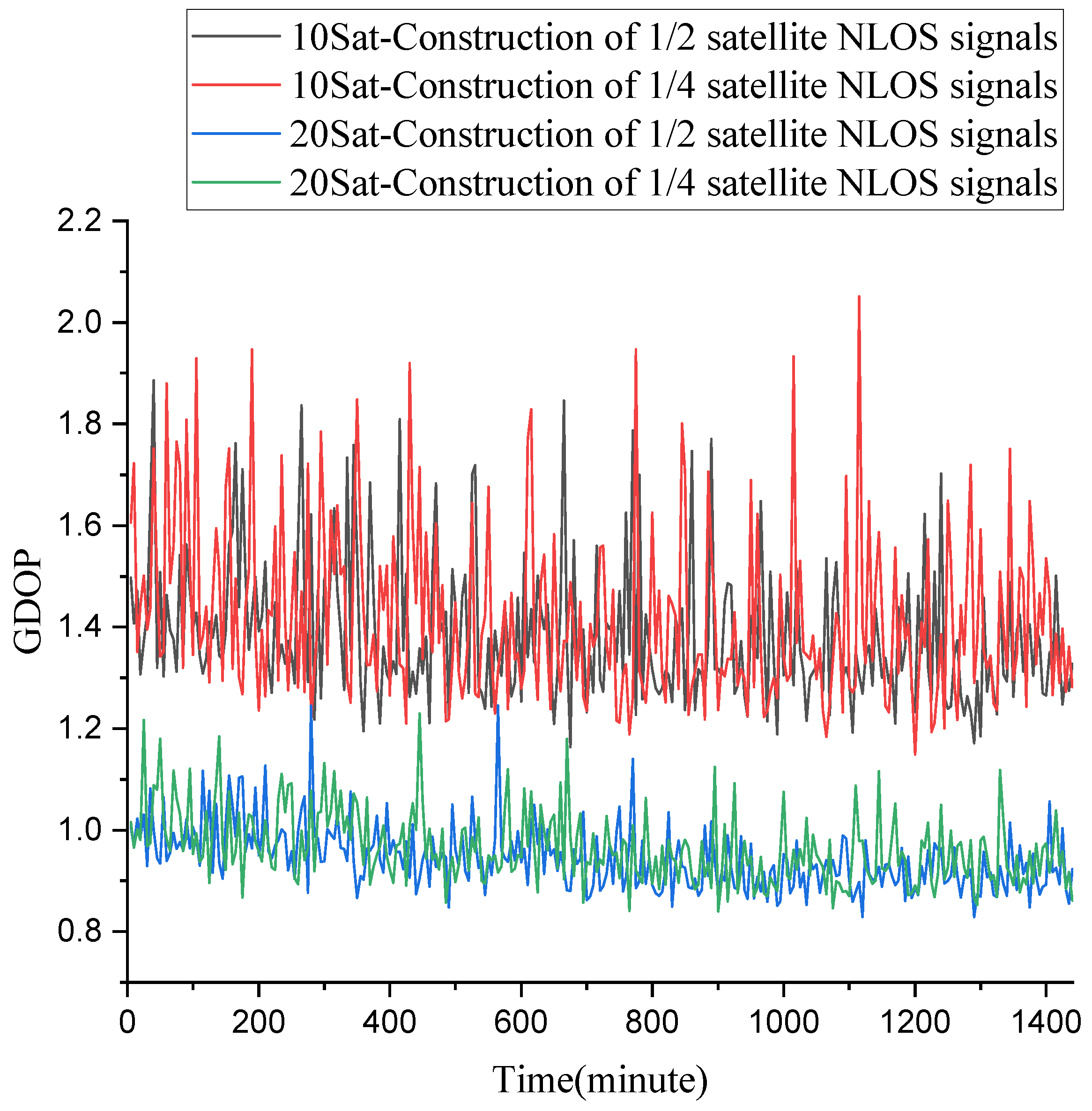
The fast satellite selection algorithm for positioning in LEO constellations, as proposed by [31], is used to efficiently select satellites. When employing the proposed virtual satellite creation method and performing inversion on half and one-quarter of the visible satellites, the GDOP conditions for selecting 10 and 20 satellites are as illustrated in Figure 9 and Figure 10.
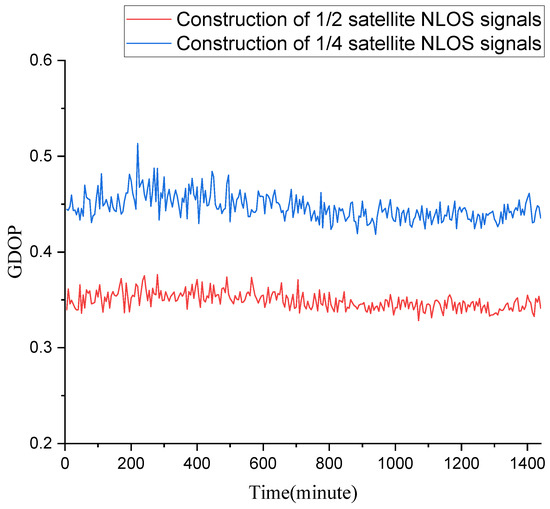
Figure 9.
GDOP under different virtual satellite settings below 60° NLOS condition: half of the satellites are set as virtual, one-quarter of the satellites are set as virtual.
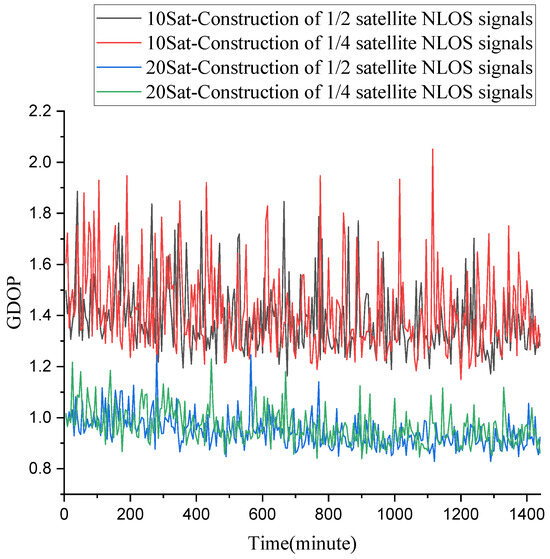
Figure 10.
GDOP with under different virtual satellite settings below 60° (10/20) NLOS condition: half of the satellites are set as virtual, one-quarter of the satellites are set as virtual.
Simulation results indicate that GDOP values generally range between 1 and 2, suggesting improved positioning accuracy. Based on [32], the URE is set to 7.7 m for LEO satellites, which is higher than the typical GNSS URE of 6.1m reported in [33]. Selecting 20 satellites typically yields better results than selecting 10, consistent with the principle that increasing the number of satellites enhances positioning accuracy and stability. Regarding the NLOS signal recovery ratio, the data reveal that with 10 satellites, recovering half of the NLOS signal slightly outperforms recovering a quarter. However, with 20 satellites, this difference becomes less pronounced, implying that a larger number of satellites can partially mitigate the effect of the NLOS recovery ratio. The algorithm performs best when 20 satellites are used and a quarter of the NLOS signal is recovered, yielding the lowest GDOP of 0.83989 and corresponding to a root mean square error (RMSE) of 6.47 m. In contrast, the worst performance occurs with 10 satellites and a quarter of the NLOS signal, resulting in a GDOP of 2.05149 and corresponding to an RMSE of 15.80 m. Notably, GDOP values remain stable over time, showing no significant temporal trends. These findings underscore the potential of the proposed method for high-accuracy GNSS positioning in challenging environments, particularly where NLOS signals dominate, such as urban canyons. The algorithm’s ability to maintain acceptable accuracy even when only partial NLOS signal recovery is achieved is crucial for practical applications.
According to Equation (9), the 3D position error is influenced by both the user distance error and the geometric dilution factor (GDOP). Specifically, the user distance error reflects measurement inaccuracies, while GDOP quantifies how the satellite geometry amplifies positioning errors. While introducing inverted virtual NLOS satellite signals adds some errors, it significantly reduces the amplification effect on positioning errors by optimizing the GDOP (from over 10 to a mean of less than 1.42). Thus, the introduction of additional satellites compensates for the errors from virtual NLOS signals and greatly improves the accuracy of 3D position estimation in urban canyon environments.
5. Conclusions
This article examines the performance enhancement of low-orbit satellite positioning systems in urban canyon environments, particularly under complex conditions with NLOS satellite signals. Initially, a theoretical signal model is developed, using a narrowband far-field source to capture the spatial characteristics of satellite signals. Next, a spatial correlation matrix is derived based on signal reception from a uniform surface array antenna, forming the basis for the spatial spectrum of the 2D-MUSIC algorithm. Additionally, an innovative method is proposed for pre-estimating elevation angles using the a priori information from satellite ephemeris. Building on this, an efficient, high-precision azimuth discrimination algorithm is developed, reducing dimensionality and simplifying computation. Simulation results demonstrate the effectiveness of the proposed positioning estimation method. The azimuth discrimination algorithm reduces computational complexity while maintaining high-precision angle estimation.
The NLOS virtual satellite construction method is proposed to integrate NLOS satellite data into the positioning system, enhancing its accuracy in complex environments. Simulation experiments deploy a satellite positioning system using a uniform surface array antenna in a simulated environment containing both line-of-sight and non-line-of-sight satellite signals. The NLOS virtual satellite construction method significantly enhances positioning accuracy in NLOS environments, particularly when the number of visible satellites is limited. The experiments confirm that the proposed method effectively utilizes NLOS signals to improve the positioning accuracy without increasing hardware complexity. The findings in this paper provide valuable insights for designing effective NLOS signal processing strategies in low-orbit satellite positioning systems for urban canyon environments.
Author Contributions
Conceptualization, J.G. and Y.W.; methodology, J.G.; supervision, J.G.; writing—original draft preparation, J.G.; writing—review and editing, J.G. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported in part by the Science and Technology Project of Shenzhen under Grant JCYJ20200109113424990 and in part by the Marine Economy Development Project of Guangdong Province under Grant GDNRC [2020]014.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the authors on request.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Weng, D.; Hou, Z.; Meng, Y.; Cai, M.; Chan, Y. Characterization and Mitigation of Urban GNSS Multipath Effects on Smartphones. Measurement 2023, 223, 113766. [Google Scholar] [CrossRef]
- Liu, D.; Liu, K.; Ma, Y.; Yu, J. Joint TOA and DOA Localization in Indoor Environment Using Virtual Stations. IEEE Commun. Lett. 2014, 18, 1423–1426. [Google Scholar] [CrossRef]
- Ma, Y.; Wang, B.; Pei, S.; Zhang, Y.; Zhang, S.; Yu, J. An Indoor Localization Method Based on AOA and PDOA Using Virtual Stations in Multipath and NLOS Environments for Passive UHF RFID. IEEE Access 2018, 6, 31772–31782. [Google Scholar] [CrossRef]
- Zhang, R.; Xia, W.; Yan, F.; Shen, L. A Single-Site Positioning Method Based on TOA and DOA Estimation Using Virtual Stations in NLOS Environment. China Commun. 2019, 16, 146–159. [Google Scholar]
- Deng, Z.; Zheng, X.; Zhang, C.; Wang, H.; Yin, L.; Liu, W. A TDOA and PDR Fusion Method for 5G Indoor Localization Based on Virtual Base Stations in Unknown Areas. IEEE Access 2020, 8, 225123–225133. [Google Scholar] [CrossRef]
- Liang, J.; He, J.; Yu, W.; Truong, T.K. Single-Site 3-D Positioning in Multipath Environments Using DOA-Delay Measurements. IEEE Commun. Lett. 2021, 25, 2559–2563. [Google Scholar] [CrossRef]
- Li, Z.; Tian, Z.; Wang, Z.; Zhang, Z. Multipath-Assisted Indoor Localization Using a Single Receiver. IEEE Sens. J. 2021, 21, 692–705. [Google Scholar] [CrossRef]
- Luo, R.; Yan, L.; Deng, P.; Kuang, Y. Hybrid TOA/AOA Virtual Station Localization Based on Scattering Signal Identification for GNSS-Denied Urban or Indoor NLOS Environments. Appl. Sci. 2022, 12, 12157. [Google Scholar] [CrossRef]
- Shamsian, M.R.; Sadeghi, M.; Behnia, F. Joint TDOA and DOA Single Site Localization in NLOS Environment Using Virtual Stations. IEEE Trans. Instrum. Meas. 2024, 73, 5500710. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Stoica, P.; Nehorai, A. MUSIC, maximum likelihood, and Cramer-Rao bound. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 720–741. [Google Scholar] [CrossRef]
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Kaveh, M.; Barabell, A. The statistical performance of the MUSIC and the minimum-norm algorithms in resolving plane waves in noise. IEEE Trans. Acoust. Speech Signal Process. 1986, 34, 331–341. [Google Scholar] [CrossRef]
- Ferreol, A.; Larzabal, P.; Viberg, M. On the asymptotic performance analysis of subspace DOA estimation in the presence of modeling errors: Case of MUSIC. IEEE Trans. Signal Process. 2006, 54, 907–920. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, L.; Xu, L.; Xu, D. Direction of departure (DOD) and direction of arrival (DOA) estimation in MIMO radar with reduced-dimension MUSIC. IEEE Commun. Lett. 2010, 14, 1161–1163. [Google Scholar] [CrossRef]
- Huihui, M.; Haihong, T. Joint 2D-DOA and polarization estimation for sparse nonuniform rectangular array composed of spatially spread electromagnetic vector sensor. J. Syst. Eng. Electron. 2020, 31, 1116–1127. [Google Scholar] [CrossRef]
- Ali, H.; Ahmed, S.; Sharawi, M.S.; Alouini, M.S.; Al-Naffouri, T.Y. Reduced complexity DOA and DOD estimation for a single moving target in bistatic MIMO radar. Signal Process. 2020, 166, 107276. [Google Scholar] [CrossRef]
- He, Z.; Tian, Z.; Zhou, M.; Li, Z.; Liu, K. DOA Estimation Method for Polarization Sensitive Circular Array Based on Reduced-Dimensional MUSIC. In Proceedings of the 2022 IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting (AP-S/URSI), Denver, CO, USA, 10–15 July 2022; pp. 427–428. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Y.; Tian, Z.; Leus, G.; Zhang, G. Efficient Angle Estimation for MIMO Systems via Redundancy Reduction Representation. IEEE Signal Process. Lett. 2022, 29, 1052–1056. [Google Scholar] [CrossRef]
- Ma, T.; Xiao, Y.; Lei, X. Channel Reconstruction-Aided MUSIC Algorithms for Joint AoA&AoD Estimation in MIMO Systems. IEEE Wirel. Commun. Lett. 2023, 12, 322–326. [Google Scholar] [CrossRef]
- Hou, L.; Wu, J.; Heng, W. Millimeter-Wave Channel Estimation Based on 2-D Beamspace MODE Method. IEEE Access 2024, 12, 12478–12487. [Google Scholar] [CrossRef]
- Ng, H.F.; Zhang, G.; Hsu, L.T. A Computation Effective Range-Based 3D Mapping Aided GNSS with NLOS Correction Method. J. Navig. 2020, 73, 1202–1222. [Google Scholar] [CrossRef]
- Xu, H.; Angrisano, A.; Gaglione, S.; Hsu, L.T. Machine learning based LOS/NLOS classifier and robust estimator for GNSS shadow matching. Satell. Navig. 2020, 1, 15. [Google Scholar] [CrossRef]
- Bai, X.; Wen, W.; Hsu, L.t. Using Sky-pointing fish-eye camera and LiDAR to aid GNSS single-point positioning in urban canyons. IET Intell. Transp. Syst. 2020, 14, 908–914. [Google Scholar] [CrossRef]
- Gakne, P.V.; O’Keefe, K. Tightly-coupled GNSS/vision using a sky-pointing camera for vehicle navigation in urban areas. Sensors 2018, 18, 1244. [Google Scholar] [CrossRef]
- Wen, W.W.; Hsu, L.T. 3D LiDAR Aided GNSS NLOS Mitigation in Urban Canyons. IEEE Trans. Intell. Transp. Syst. 2022, 23, 18224–18236. [Google Scholar] [CrossRef]
- Zhong, Q.; Groves, P. Optimizing LOS/NLOS modeling and solution determination for 3D-mapping-aided GNSS positioning. In Proceedings of the 36th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2023), Denver, CO, USA, 11–15 September 2023; pp. 373–402. [Google Scholar]
- Blanco-Delgado, N.; Duarte Nunes, F.; Seco-Granados, G. On the Relation between GDOP and the Volume Described by the User-to-Satellite Unit Vectors for GNSS Positioning. GPS Solut. 2017, 21, 1139–1147. [Google Scholar] [CrossRef]
- Misra, P.; Enge, P. Global Positioning System: Signals, Measurements, and Performance, revised 2. ed., 2. printing, revised and updated ed.; Ganga-Jamuna Press: Lincoln, MA, USA, 2012. [Google Scholar]
- Reid, T.G.; Neish, A.M.; Walter, T.F.; Enge, P.K. Leveraging Commercial Broadband LEO Constellations for Navigating. In Proceedings of the 29th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2016), Portland, OR, USA, 12–16 September 2016; pp. 2300–2314. [Google Scholar]
- Guo, J.; Wang, Y.; Xie, X.; Sun, C. A fast satellite selection algorithm for positioning in LEO constellation. Adv. Space Res. 2024, 73, 271–285. [Google Scholar] [CrossRef]
- Prol, F.S.; Kaasalainen, S.; Lohan, E.S.; Bhuiyan, M.Z.H.; Praks, J.; Kuusniemi, H. Simulations using LEO-PNT systems: A Brief Survey. In Proceedings of the 2023 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 24–27 April 2023; pp. 381–387. [Google Scholar] [CrossRef]
- Tongyu, Z.; Aihua, X.; Rui, S. Evaluation on User Range Error and Global Positioning Accuracy for GPS/BDS Navigation System. In Proceedings of the 2014 IEEE Chinese Guidance, Navigation and Control Conference, Yantai, China, 8–10 August 2014; pp. 680–685. [Google Scholar]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).