Abstract
The field of indoor localization is fast developing and has important ramifications for a number of areas, such as smart infrastructure development, healthcare settings, industrial automation, and military operations. Advances in a range of technologies, each suited to certain use cases and objectives, have been fueled by the capacity to precisely locate objects or people inside places. Prominent indoor localization technologies like Bluetooth, Wi-Fi, ultra-wideband (UWB), ZigBee, and RFID-based systems are examined in this review, along with hybrid solutions that combine several technologies to get around their individual drawbacks and enhance system performance. The field still faces several obstacles in spite of these developments. Widespread acceptance is hampered by persistent problems such as signal interference, high energy consumption, and restricted scalability. The deployment of these systems is further complicated by elements like cost-effectiveness, privacy issues, and compatibility in a variety of situations. This study also examines potential avenues for future research to improve the precision, dependability, and versatility of indoor localization technology in order to overcome these obstacles. Designing systems with increased resilience to environmental changes, utilizing edge computing for real-time processing, and integrating artificial intelligence for predictive modeling are all promising areas of emphasis. This study attempts to help academics and practitioners navigate the changing terrain of indoor localization by offering a comprehensive picture of the field’s present status and future directions.
1. Introduction
As the need for consistent indoor localization keeps increasing, researchers are looking at creative and flexible solutions for a variety of uses. Indoor localization is the capacity to precisely locate assets, people, or objects in enclosed environments where signal attenuation and blockage make it difficult to use standard Global Navigation Satellite System (GNSS) technology [1]. Many industries, including emergency response, logistics, healthcare, and industrial operations, view this capacity as critical. Each of these industries has its own set of problems that necessitate the development of specific localization solutions to enhance effectiveness, security, and decision-making [2].
In healthcare, the real-time tracking of patients, medical staff, and critical equipment is enhanced by accurate indoor localization, leading to optimized workflows and improved patient safety [3,4]. In industrial environments, where efficiency and safety are paramount, assets are tracked, workflows are monitored, and worker safety is ensured by localization systems, even in the presence of heavy machinery, metallic obstructions, and dynamic conditions. In the retail and logistics sectors, inventory management is improved, supply chain processes are streamlined, and the customer experience is enhanced through personalized navigation and product tracking, all facilitated by indoor localization [5].
In military and emergency response operations, mission success and personnel safety are critically dependent on indoor localization [6,7]. Systems that function in GNSS-denied settings, such as urban warfare zones or collapsed buildings, are often required in these environments, where accurate real-time tracking can determine the difference between success and failure. Soldiers, first responders, and assets are tracked in such high stakes situations, improving coordination, decision-making, and overall mission outcomes [8].
Emerging technologies like lightweight, low-power MEMS-based sensors are being developed to provide scalable and affordable indoor localization solutions to fulfill these various demands. The combination of real-time data fusion with AI-driven analytics improves accuracy and flexibility, especially in dynamic and uncertain contexts [9]. However, for these systems to reach their full potential, issues including signal interference, multipath propagation, infrastructure reliance, and data security still need to be resolved. Indoor spaces introduce complexities not found in outdoor environments dominated by GNSS [10]. Factors such as signal attenuation, multipath interference, and non-line-of-sight (NLOS) conditions necessitate the development of robust, hybrid localization systems tailored to specific use cases. As research continues to advance, solutions that combine multiple technologies, such as Bluetooth Low Energy (BLE), Wi-Fi, RFID, ultra-wideband (UWB), and inertial navigation systems (INS), are being explored to overcome these challenges. These innovations promise to provide accurate, secure, and efficient localization solutions across various sectors, transforming operations and paving the way for smarter, safer, and more efficient environments [11].
Indoor localization technologies are revolutionizing healthcare by enabling the precise real-time tracking of patients, medical staff, and critical assets. This capability significantly enhances operational efficiency and patient safety within healthcare facilities. By leveraging technologies such as BLE, Wi-Fi, and advanced localization algorithms, these systems can deliver highly accurate location data even in complex, crowded environments. Machine learning (ML) technology using Wi-Fi data is transforming indoor localization by enabling precise and efficient position estimation [12,13]. For example, BLE-based solutions that utilize iBeacons can achieve an impressive localization accuracy within 12 cm, which helps optimize workflows and reduce delays in busy hospital settings. Additionally, IoT-based real-time locating systems (RTLSs), such as LoCATE, offer location accuracy within 3–5 feet. However, these RTLS solutions are vulnerable to security risks, including data breaches and unauthorized access. To mitigate these risks, implementing security measures like data encryption and tamper-proof hardware is crucial to ensure that these systems remain reliable and secure [14].
Another promising advancement is the integration of indoor localization with human activity recognition (HAR) systems. HAR systems use wearable sensors and activity-detection algorithms to monitor the real-time movements and behaviors of mobility-impaired or elderly patients [15]. This capability is particularly valuable for detecting falls or other incidents that require immediate attention. Despite their potential, these systems encounter several challenges, such as signal interference, NLOS conditions, and multipath effects caused by reflections within the environment [16]. These factors can hinder the accuracy and scalability of localization systems. To overcome these limitations, hybrid approaches that combine technologies like BLE and UWB are being explored. UWB, known for its high precision and resilience to interference, can significantly enhance the reliability of indoor localization in healthcare settings [17].
Looking ahead, research must prioritize the development of secure, scalable, and cost-effective indoor localization systems [18]. Innovations in AI-driven analytics, sensor fusion, and advanced encryption protocols hold the potential to address current challenges and further enhance these technologies. AI-driven analytics can process large volumes of location data to optimize decision-making and predict patterns, improving the efficiency of hospital operations [19]. Sensor fusion—the combination of data from multiple sensors—can help mitigate accuracy issues by providing more comprehensive and reliable location information. Meanwhile, advanced encryption ensures data integrity and privacy, addressing concerns around security threats. By incorporating these innovations, indoor localization systems can be seamlessly integrated into healthcare workflows. These advancements promise to transform various aspects of healthcare, including patient monitoring, asset management, and overall service delivery [20]. As these technologies mature, they can pave the way for smarter and more efficient medical environments. For instance, hospitals could automate resource allocation based on real-time data, reduce wait times by locating staff and equipment instantly, and improve patient outcomes through continuous monitoring. The future of healthcare lies in embracing these transformative technologies, which can lead to safer, more efficient, and more responsive medical care [11,19].
Indoor localization systems are increasingly vital in various sectors, including healthcare, industrial operations, military missions, and emergency response scenarios. These systems are crucial for tracking personnel, assets, and equipment in GNSS-denied environments where GPS signals are unavailable or unreliable due to structural obstructions or interference [21]. The benefits of accurate indoor localization include improved safety, operational efficiency, and decision-making. Whether managing a hospital’s workflows, optimizing industrial processes, or coordinating military and first responder missions, reliable localization technology enhances situational awareness and streamlines critical operations [22].
Unlike outdoor environments where GNSS technologies excel, indoor localization faces significant challenges such as signal attenuation, NLOS conditions, and dynamic environmental changes. In industrial settings, the presence of metallic obstructions, moving machinery, and fluctuating environmental factors complicates accurate tracking. For example, military and firefighting operations often occur in unpredictable environments without pre-installed infrastructure, making real-time localization difficult. The Poucet system addresses this by combining technologies like GPS, LoRa, UWB, and altimeters in a hybrid architecture. By strategically deploying nodes during operations, the system ensures reliable localization in challenging conditions [23].
To overcome these challenges, a range of technologies and strategies are being implemented. UWB technology, operating in the 3.5–6.5 GHz frequency range, is particularly effective in industrial environments due to its ability to minimize interference and offer high-precision localization, even in harsh conditions [24]. Additionally, RFID-based systems are employed for asset tracking and environmental monitoring. For instance, specialized RFID-sensitive tags can detect nanometer-scale corrosion on metallic surfaces, extending the utility of localization technologies to equipment maintenance and environmental sensing [23].
Moreover, innovative algorithmic approaches like particle filtering and sensor fusion can enhance localization accuracy. These methods combine data from various sensors, including inertial measurement units (IMUs), vision systems, and radio-based technologies, to create comprehensive localization frameworks [25]. For example, multisensor systems that employ cellular automata particle filtering can dynamically adjust the weighting of sensor data based on real-time performance metrics. This capability allows robots and automated machinery to navigate complex industrial environments with high reliability [26]. In healthcare, these technologies improve the real-time tracking of patients, staff, and medical assets, enhancing workflow efficiency and patient safety. BLE and IoT-based RTLSs provide accurate localization in hospitals, while HAR systems enable the monitoring of mobility-impaired or elderly patients using wearable sensors [27,28].
In military and emergency response operations, hybrid localization systems and adaptive sensor fusion frameworks ensure robustness and flexibility [29]. Systems like Project Sentinel employ hard, soft, and predetermined fusion techniques to maintain reliable tracking in dynamic and unpredictable scenarios. This ensures that commanders have real-time position data, enabling faster response times, improved resource allocation, and enhanced safety for personnel. Advanced features such as health monitoring, weapon orientation tracking, and after-action reviews (AARs) provide additional layers of functionality for mission planning and analysis [7,30].
Despite these advancements, challenges remain in terms of scalability, cost-effectiveness, and maintaining accuracy under highly dynamic conditions. In industrial environments, the need for systems that can scale to large facilities while remaining affordable is critical [31]. AI-driven analytics, sensor fusion, and advanced encryption protocols will play pivotal roles in overcoming these challenges. AI can improve accuracy by identifying patterns and compensating for errors, while robust cybersecurity measures protect against data breaches and unauthorized access [32,33]. As research continues, the focus must be on developing localization systems that are secure, adaptable, and efficient across diverse applications. The integration of these technologies will pave the way for smarter healthcare facilities, more efficient industrial operations, and safer military and emergency response missions [34]. By addressing current limitations, indoor localization systems will ultimately transform how critical sectors operate, improving outcomes and enhancing safety in complex environments [35].
The Poucet system exemplifies a cutting-edge hybrid localization approach by integrating multiple technologies such as GPS, LoRa, UWB, and altimeters into a unified framework [36]. This combination allows for versatile, real-time tracking and reliable localization, especially in GNSS-denied environments where traditional GPS signals are obstructed or unavailable. By strategically deploying nodes during operations, the Poucet system ensures consistent performance even in dynamic and unpredictable settings. This type of adaptability is crucial for military missions and emergency response operations, where conditions can change rapidly and infrastructure for localization is often lacking [36].
In parallel, research on adaptive sensor fusion frameworks, as seen in military projects like Project Sentinel, highlights the importance of combining multiple data sources to achieve robustness and flexibility. These frameworks employ hard, soft, and predetermined fusion techniques to maximize accuracy and reliability [37]. Hard fusion integrates raw data from different sensors, soft fusion combines processed data, and predetermined fusion applies predefined rules based on environmental context. This multi-faceted approach allows localization systems to dynamically adjust to real-world conditions, ensuring reliable performance in diverse scenarios, such as urban combat zones or collapsed buildings during rescue operations [36].
The importance of accurate indoor localization becomes even more evident in high-stakes scenarios like military urban operations or emergency rescue missions. In these situations, precise positioning systems enable faster response times, better resource allocation, and enhanced safety for personnel [38]. For example, systems employing cooperative localization—where multiple agents share their positioning data—provide commanders with a comprehensive, real-time overview of troop or responder locations. This real-time situational awareness allows for better decision-making and minimizes the risks associated with poor coordination, such as delayed responses or operational failures [7,38].
Beyond basic positioning, advanced indoor localization systems offer additional functionalities that further enhance mission effectiveness [39]. These include health monitoring, where soldiers’ or first responders’ vital signs are tracked in real time to detect potential injuries or fatigue. Another critical feature is weapon orientation tracking, which helps ensure that troops’ actions are well-coordinated and aligned with mission goals [38]. After missions are complete, data collected from localization systems can be used for AARs, providing detailed insights into what went well and what could be improved. These reviews are invaluable for refining strategies, improving training programs, and enhancing overall mission preparedness [30].
Moreover, these localization systems reduce the risks associated with fratricide (friendly fire) and miscommunication in high-pressure environments [40]. By offering precise data on the location and orientation of each team member, commanders can issue clearer instructions, and soldiers can act with greater confidence. This not only improves operational efficiency but also increases the overall safety of personnel engaged in complex missions. Looking forward, the continued development of hybrid localization systems will likely focus on integrating AI-driven analytics, machine learning algorithms, and advanced encryption protocols to ensure data security and reliability [41]. As these technologies evolve, they will play an increasingly critical role in enhancing situational awareness, decision-making, and mission success across military, rescue, and other high-stakes domains. By addressing the challenges of GNSS-denied environments and incorporating advanced features, these systems promise to revolutionize how operations are conducted, making them safer, more efficient, and more responsive to the demands of modern challenges [42].
Table 1 summarizes indoor localization systems across sectors, highlighting key applications and technologies. In the medical sector, BLE, IoT-based RTLS, and Wi-Fi support patient tracking, asset management, and HAR. The industrial sector utilizes UWB, RFID, BLE, and Wi-Fi for asset tracking, worker safety, and process optimization, ensuring real-time monitoring and efficiency. Meanwhile, the military sector employs UWB, ZigBee, Wi-Fi, and Bluetooth for personnel tracking, mission planning, and asset management, aiding secure communication and logistics. This table categorizes technologies based on industry needs, showcasing their role in tracking and positioning solutions.

Table 1.
Breakdown of indoor localization systems in the different sectors discussed in this paper.
2. Technology of Indoor Localization
In this section, we present several modules commonly used for indoor localization across various sectors. Each module is briefly described with its specifications and typical usage scenarios. These modules play a crucial role in enabling accurate positioning in environments where GNSSs are ineffective, such as healthcare facilities, industrial environments, and military operations [1,2]. By understanding the capabilities and applications of these devices, we can better appreciate their contributions to improving tracking, navigation, and asset management.
2.1. RFID Module
The RFID-RC522 module is a versatile tool for real-time localization and tracking, operating at a frequency of 13.56 MHz. In Figure 1, this module consists of an antenna coil that generates an electromagnetic field, a microcontroller that processes the signals, and pins for interfacing with external systems like Arduino or Raspberry Pi [43]. When an RFID tag which contains an embedded antenna and a microchip storing unique identification data comes into proximity (within 2–5 cm) to the module, the module’s antenna powers the tag. The tag then transmits its data back to the reader via radio waves. These data are captured, processed, and sent to a connected system, triggering actions like updating a database, logging asset information, or controlling access to secure areas [44]. RFID technology is widely used across various sectors. In healthcare, RFID modules track patients, staff, and medical equipment, improving workflow efficiency and patient safety by reducing equipment misplacement. In industrial environments, RFID facilitates inventory management, process automation, and environmental monitoring, such as detecting metal corrosion in harsh conditions [43]. The military sector benefits from RFID for tracking logistics and ensuring mission readiness in GNSS-denied environments like urban warfare zones. In retail and logistics, RFID supports inventory control, enhances the customer experience, and ensures real-time shipment tracking. Emergency response operations use RFID to improve coordination by tracking first responders and equipment during rescue missions. These applications demonstrate the adaptability and effectiveness of RFID in improving efficiency, safety, and resource management across diverse industries [44].
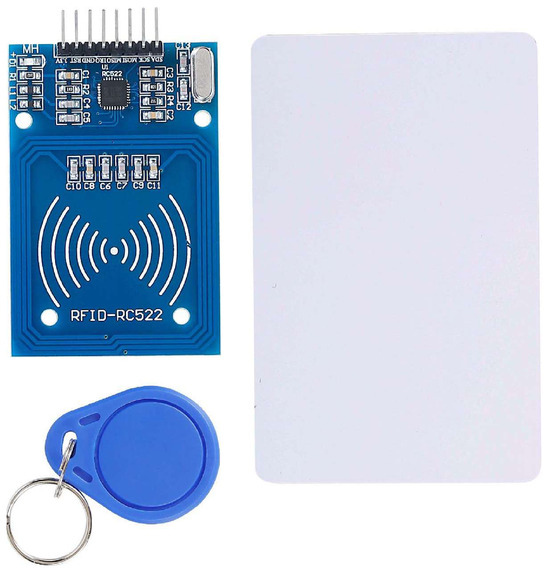
Figure 1.
RFID-RC522 module with key fob and RFID card.
RFID technology combined with a random forest classifier improves patient localization accuracy in hospital emergency units. Patients wear RFID tags that emit signals, which are detected by strategically placed antennas. A hierarchical random forest-based classifier groups rooms into macro-regions for efficient room-level classification, achieving an 83% success rate for correct room identification. This system enhances scalability and ensures reliable, real-time tracking in high-density areas like emergency departments, reducing the risk of lost patients and improving safety. Additionally, a distributed indoor localization algorithm using received signal strength (RSS) from RF beacons leverages existing nurse call networks to minimize hardware costs. Wearable devices communicate with nearby beacons, and a decision-tree algorithm processes the data independently, achieving room-level accuracy. This approach enhances scalability, improves response times, and ensures operational efficiency by accurately associating patient calls with their real-time locations, seamlessly integrating into the existing hospital infrastructure [45,46].
2.2. Wi-Fi Module
The ESP8266 Wi-Fi module (Figure 2) is a compact, affordable microchip designed to provide Wi-Fi connectivity for various applications. Operating at a 2.4 GHz frequency and compliant with 802.11 b/g/n Wi-Fi standards, this module connects to most modern wireless networks. It supports both client mode (connecting to existing networks) and access point mode (creating its own Wi-Fi network), offering versatility for a range of use cases. With a transmission power of +25 dBm, the ESP8266 ensures reliable communication over moderate distances [47]. Its multiple GPIO pins (general purpose input/output) enable easy connection with sensors, actuators, and other hardware, increasing its flexibility.

Figure 2.
Wi-Fi module of an ESP8266 device.
The ESP8266 is widely used in Wi-Fi-based RTLSs, especially in healthcare environments, for tracking assets, staff, and patients. Hospitals can integrate the ESP8266 into wearable devices or Wi-Fi-enabled tags to efficiently track medical equipment like wheelchairs, infusion pumps, and defibrillators. This approach leverages the existing hospital Wi-Fi infrastructure, making real-time tracking cost-effective and scalable. Additionally, Wi-Fi-based positioning systems support the simultaneous tracking of multiple devices over large hospital areas without the need for additional specialized hardware. This is particularly beneficial in high-density environments where traditional tracking systems like BLE (Bluetooth low energy) may have insufficient range. Wi-Fi-based systems can also gather data on hospital traffic patterns, helping optimize facility management and workflow efficiency [48].
The ESP8266 plays a crucial role in Internet of Things (IoT) applications, connecting medical devices to cloud platforms for real-time data collection and analysis. This capability supports predictive maintenance, automated patient flow management, and improved decision-making in hospital operations. For example, a Wi-Fi-based localization system using received signal strength indicator (RSSI) values and a backpropagation-based artificial neural network (BP-ANN) can achieve high localization accuracy, particularly for tracking Alzheimer’s patients. The neural network processes RSSI data from multiple anchor nodes placed in key locations to estimate patient positions with a low localization error of around 0.964 m. This system helps caregivers monitor patient movements in real time, ensuring safety by promptly responding to wandering or disorientation incidents [4,49,50].
Furthermore, the ESP8266 can be paired with sensors to monitor environmental conditions such as temperature, humidity, and air quality. These real-time data help maintain safety standards in hospitals and industrial settings. The module also supports hospital automation systems, controlling functions like lighting, HVAC systems, and security systems to improve operational efficiency. With its low cost, low power consumption, and versatility, the ESP8266 Wi-Fi module is a valuable tool for enhancing real-time tracking, asset management, patient safety, and overall healthcare quality [51].
2.3. Bluetooth Module
The HC-05 Bluetooth module (Figure 3) is a widely used device for enabling wireless communication between systems, operating on the 2.4 GHz frequency and supporting Bluetooth 2.0 with Enhanced Data Rate (EDR). This module is designed to provide seamless wireless connections for applications such as healthcare tracking, IoT projects, and RTLSs [52]. It can function in both master mode (initiating connections) and slave mode (accepting connections), giving it flexibility in different communication scenarios. The HC-05 uses a UART (universal asynchronous receiver/transmitter) interface, making it easy to connect with microcontrollers like Arduino and Raspberry Pi.
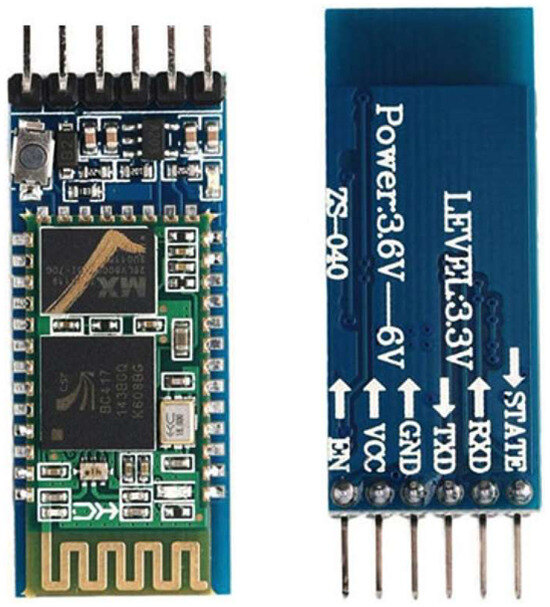
Figure 3.
HC-05 Bluetooth module.
The module’s key features include an operating voltage range of 3.6 V to 6 V and a communication range of up to 10 m (33 feet), depending on the environment. It supports data transfer rates of up to 2 Mbps, making it suitable for applications requiring low-bandwidth communication, such as transmitting sensor data or control commands. The HC-05 also has several pins for connectivity, including VCC for power, GND for ground, TXD (Transmit), RXD (Receive), and an EN (Enable) pin to control power to the module [50]. In healthcare environments, the HC-05 module is used in BLE-based RTLSs for tracking patients, staff, and medical equipment. Its low power consumption makes it ideal for wearable devices that require prolonged battery life. For example, patient wristbands equipped with HC-05 modules can send real-time location data to hospital systems, helping staff quickly locate patients or equipment such as wheelchairs, defibrillators, and infusion pumps [53].
The HC-05 also supports IoT integration by enabling wireless communication between medical sensors and monitoring systems. This allows hospitals to collect and analyze real-time data, such as patient vital signs, environmental conditions, and asset locations. In addition, the module can be used for environmental monitoring, connecting sensors to track temperature, humidity, and other conditions critical to patient care and equipment maintenance. The flexibility and ease of use of the HC-05 make it a valuable tool for improving patient safety, staff coordination, and resource management in healthcare and other industries [50].
2.4. ZigBee Module
In Figure 4, the ZigBee module shield shows a breakout board designed to interface with ZigBee communication modules like XBee. ZigBee is a low-power, short-range wireless communication protocol based on the IEEE 802.15.4 standard [54], commonly used in applications such as home automation, healthcare monitoring, industrial automation, and Internet of Things (IoT) projects. This shield simplifies the process of connecting ZigBee modules to microcontrollers like Arduino or other development boards, making wireless communication integration more accessible and efficient [43,55].
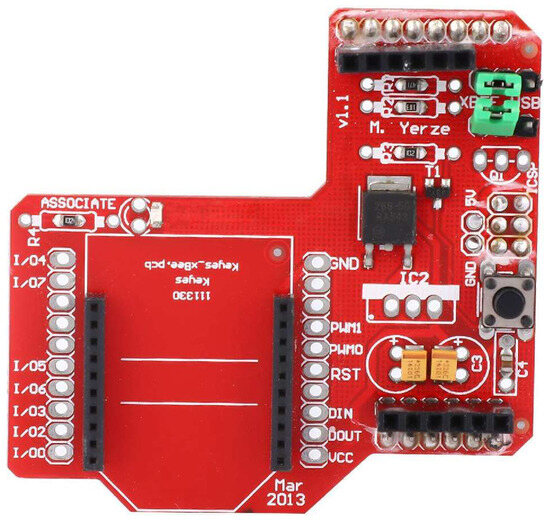
Figure 4.
ZigBee shield module.
The shield includes two sets of pin headers for mounting the ZigBee module, with dedicated Data In (DIN) and Data Out (DOUT) pins for transmitting and receiving data to and from the microcontroller. It also features configurable general purpose input/output (GPIO) pins (I/O1 to I/O7) for connecting sensors, actuators, or LEDs, a reset button (RST) for troubleshooting, and an ASSOCIATE LED for indicating the connection status. The shield is equipped with a voltage regulator to maintain a stable 3.3 V power supply, pulse width modulation (PWM) pins (PWM0 and PWM1) for controlling device intensity or speed, and terminal block connectors for alternative power and hardware connections [43]. This makes the shield suitable for various applications like home automation, healthcare monitoring, industrial automation, and IoT networks, providing reliable ZigBee-based wireless communication and network coverage through mesh networking [55].
2.5. UWB Module
The BU01 UWB module with the DW1000 chip, shown in Figure 5, is designed for high-precision indoor positioning and real-time tracking. Operating within a wide frequency range of 3.1 GHz to 10.6 GHz, UWB technology can achieve centimeter-level accuracy, making it ideal for applications where precise localization is essential. This wide frequency range helps mitigate interference and multipath effects, ensuring reliable performance even in complex environments like hospitals and industrial facilities. The BU01 module is widely used in RTLSs for tracking patients, staff, and assets with an accuracy of up to 7 cm [56].
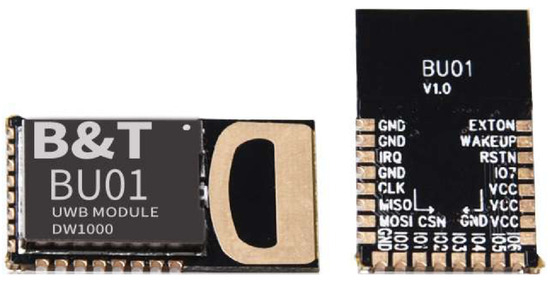
Figure 5.
BU01 UWB module (DW1000).
UWB-based localization systems rely on key components such as anchor nodes (ANs), which are fixed reference points with known coordinates, and UWB tags, which are carried by users or attached to objects. These systems use the time of arrival (TOA) method to measure the time taken for signals to travel from the tag to the anchors, determining the tag’s position through trilateration. This process allows for highly accurate positioning, even in NLOS conditions, where obstacles may block direct signal paths. To address challenges like NLOS conditions and computational complexity, deep learning techniques, particularly long short-term memory (LSTM) networks, are integrated with UWB systems. LSTM networks, a type of recurrent neural network (RNN), process sequential data effectively, making them suitable for handling time-series distance measurements [39]. In a UWB-LSTM system, TOA-based distance measurements are collected by UWB anchors and initially processed through trilateration to estimate the user’s position. These estimates are further refined by an LSTM network with two layers, improving accuracy and reducing localization errors [56].
The LSTM model is optimized with a learning rate of 0.0001, the Nadam optimizer for balancing speed and accuracy, and the mean squared error (MSE) loss function to minimize prediction errors. A batch size of 5 ensures efficient memory use and faster convergence, while 256 hidden nodes provide optimal complexity for accurate predictions. Simulation results show that the UWB-LSTM system significantly outperforms conventional methods like linearized least square estimation (LLSE), fingerprint estimation (FPE), and maximum likelihood estimation (MLE), achieving a mean localization error of just 7 cm, even in NLOS conditions [56].
The BU01 UWB module and UWB-LSTM systems offer numerous benefits, including high accuracy, adaptability to dynamic environments, and the ability to process large datasets efficiently. These systems are highly applicable in healthcare settings for the real-time tracking of patients and assets, improving emergency response and patient safety [56]. In industrial environments, UWB-based systems can track machinery, tools, and personnel with precision, optimizing workflows and safety. Additionally, in emergency services, UWB technology helps locate firefighters or rescue teams in GNSS-denied environments, enhancing mission success and safety. In conclusion, the combination of the BU01 UWB module with LSTM deep learning networks provides a robust, accurate, and efficient solution for indoor localization. This approach effectively addresses challenges like NLOS conditions, interference, and computational complexity, making it suitable for critical applications in healthcare, industry, and emergency response [57].
3. Methodology and Application of Indoor Localization in Various Fields
In this section, we describe the methodologies and applications of indoor localization across various sectors, highlighting their transformative impact. Indoor localization technologies have significantly advanced healthcare, industry, military, and logistics by enabling precise tracking in GNSS-denied environments. In healthcare, Wi-Fi, BLE, and RFID systems ensure the real-time tracking of patients, staff, and assets, improving workflows and safety. Industries utilize UWB and RFID for high-precision asset tracking and workflow optimization in challenging environments. Military and emergency operations rely on hybrid systems like UWB and LoRa for robust and adaptive localization in critical scenarios. Retail and logistics employ Wi-Fi and BLE to enhance inventory management and customer experiences.
The block diagram in Figure 6 outlines a systematic approach for selecting articles for this review on indoor localization. It begins with a broad search to establish foundational knowledge of indoor localization, followed by identifying relevant papers through an initial screening of abstracts and conclusions. Next, the process narrows down to exploring specific technologies, such as Bluetooth low energy (BLE), Wi-Fi, ultra-wideband (UWB), ZigBee, and RFID. The papers are then filtered by application areas, focusing on sectors like medical, industrial, and military. A detailed screening and evaluation of the selected papers are conducted to assess their quality, relevance, and contributions. Finally, the most relevant and high-quality studies are finalized to form the basis of this review, ensuring a comprehensive and focused analysis of indoor localization technologies and applications.
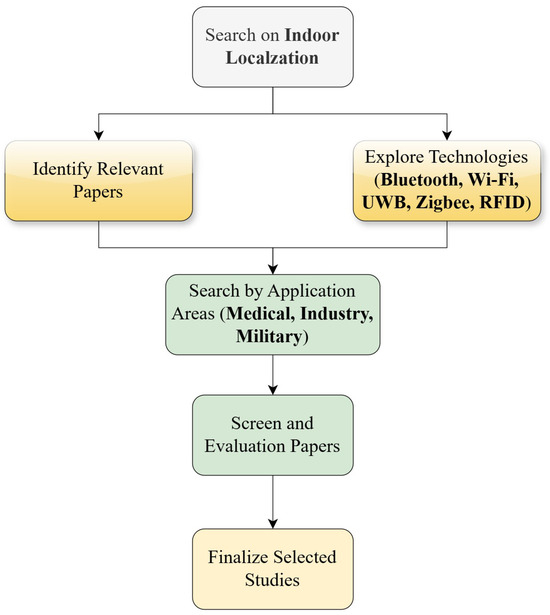
Figure 6.
Workflow for article selection.
Table 2 provides a comprehensive comparison of indoor localization technologies, highlighting their motivations, measurement methods, and applications across various domains. It outlines the use of technologies like Wi-Fi, BLE, UWB, RFID, ZigBee, and hybrid models, emphasizing their effectiveness in diverse environments such as healthcare, industrial settings, and military operations. For instance, Wi-Fi-based systems leverage RSSI and triangulation for tracking in healthcare facilities, while BLE and UWB demonstrate high accuracy in industrial environments through advanced methods like trilateration and TOA. Hybrid models address critical scenarios, integrating multiple technologies to enhance robustness and adaptability in dynamic conditions. This comparative analysis showcases the versatility of indoor localization technologies and their role in enabling real-time tracking and resource management across multiple sectors.
Table 2.
Comparison of indoor localization technologies and their applications across different domains.
3.1. Indoor Localization Applications and Methodologies in Healthcare
3.1.1. Wi-Fi Based Healthcare Facilities System
Bradley et al. [14] illustrates an implementation and security analysis of an IoT-based RTLS called LoCATE for tracking patients, staff, and assets in healthcare facilities using Wi-Fi (802.11) infrastructure. The system is designed to leverage existing hospital Wi-Fi networks to provide a cost-effective and scalable solution for real-time localization. The LoCATE system uses the Raspberry Pi 3 Model B or Raspberry Pi Zero W as edge nodes. These nodes run on the Raspbian OS and are equipped with a wireless USB dongle for collecting Wi-Fi signals. Each edge node is powered by a 12,000 mAh lithium battery, making it portable for carrying by healthcare staff or patients. The portability of these nodes ensures flexibility in deployment and ease of tracking throughout the hospital environment [14].
As shown in Figure 7, the edge nodes collect RSSI values from nearby Wi-Fi access points (APs). The system scans for Wi-Fi beacon frames every 5 to 7 s. Each data point includes the RSSI value, the media access control (MAC) address of the detected access point, and a timestamp. This continuous scanning provides the necessary data for accurate real-time tracking of patients, staff, and medical assets. Once the RSSI data are collected, they are transmitted via the facility’s Wi-Fi network to a cloud database hosted on Amazon Web Services (AWS). The cloud infrastructure uses the relational database service (RDS) to store the location data securely. Additionally, an Elastic Compute Cloud (EC2) instance connects the database to a web or mobile application, enabling real-time visualization and access to historical data. This architecture allows for seamless tracking and efficient data retrieval [14].
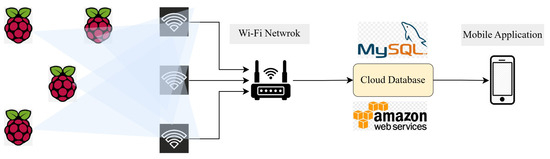
Figure 7.
Structural design of LoCATE system.
The system determines the location of the tracked assets or individuals by processing the collected RSSI values. Using triangulation algorithms, the system calculates positions relative to the known locations of Wi-Fi access points. This approach achieves localization accuracy within 3 to 5 feet. The cloud database can be queried for both real-time and historical location data, and the results are displayed through a user-friendly web or mobile interface, enhancing accessibility for healthcare staff. The LoCATE system also incorporates a detailed security analysis to identify vulnerabilities and ensure reliable performance. Data transmitted in clear text can be intercepted. To mitigate this risk, the system uses encryption protocols and strong passwords to prevent brute-force attacks. Edge nodes are susceptible to theft or tampering due to their portability. The use of tamper-resistant cases and secure mounting helps protect the hardware. Default SSH credentials could allow unauthorized remote access. The system mitigates this by implementing SSH key authentication and configuring firewalls (e.g., IPtables) to restrict access. Nodes can be overwhelmed with traffic, making them inoperable. To mitigate this, ICMP requests are disabled, and routers are configured to block unauthorized UDP packets. Exploiting hardware vulnerabilities to extract data poses a risk. To address this, potential hardware upgrades or architectural changes are considered when vulnerabilities are identified [14].
The LoCATE system employs the existing Wi-Fi infrastructure to provide a cost-effective, scalable, and portable solution for real-time tracking in healthcare settings. By collecting and processing RSSI data from edge nodes, the system accurately determines the location of patients, staff, and assets. The cloud-based architecture ensures seamless data transmission, storage, and visualization. Additionally, the system incorporates robust security measures to mitigate potential risks, ensuring data privacy and reliability. This combination of real-time tracking and security makes LoCATE an effective solution for improving operational efficiency and patient safety in healthcare environments [14].
3.1.2. Healthcare Facilities System Using Bluetooth
Nguyen et al. [17] proposes a BLE-based RTLS designed to track patients, staff, and assets within healthcare environments. The system uses iBeacons and BLE-enabled devices, such as wearable tags or smartphones, to achieve accurate indoor localization. This framework handles the exchange of data between the tracking devices and the central server. BLE-enabled devices (smartphones or wearable tags) collect RSSI values from iBeacons installed in fixed locations. The data are then sent to the server for processing.
The system allows users to interact with it via smartphones or other BLE-enabled devices, as shown in Figure 8. Users can receive location information, alerts, or notifications in real time. This framework also supports additional healthcare monitoring functions, such as heart rate monitoring or fall detection, through integrated sensors. The system supports communication across multiple platforms and devices, ensuring compatibility within healthcare settings. This framework ensures that data from various devices (smartphones, tablets, or wearables) can be seamlessly exchanged and processed within the hospital’s IoT network [17].
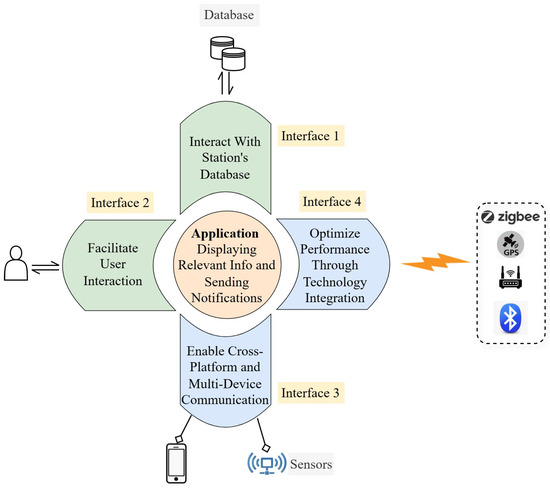
Figure 8.
System architecture of BLE-based indoor localization.
Figure 9 shows the core framework, which focuses on tracking the real-time location of patients and assets. The system uses BLE iBeacons installed at predefined positions. The RSSI values of beacon signals received by the BLE-enabled devices are processed to estimate the user’s location using an improved least square estimation (LSE) approach. The system begins with the calibration of BLE iBeacons. During this stage, the RSSI values from each iBeacon are collected and analyzed to establish baseline measurements. This calibration helps improve the accuracy of localization by accounting for signal variations due to environmental factors. BLE-enabled devices carried by patients or staff continuously collect RSSI values from nearby iBeacons, as shown in Figure 10, which illustrates the BLE positioning technology. The frequency of data collection ensures real-time updates, even in crowded or dynamic environments [17].
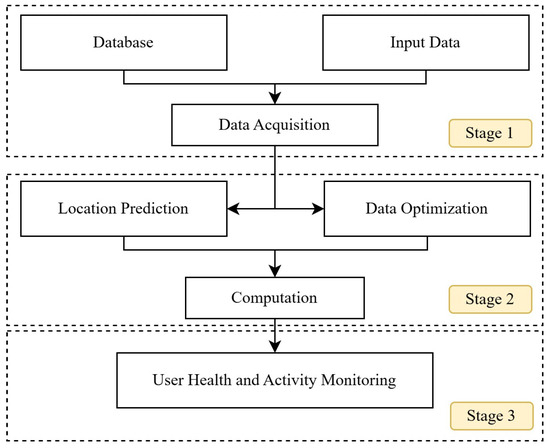
Figure 9.
Tracking workflow for patients and staff in healthcare settings.
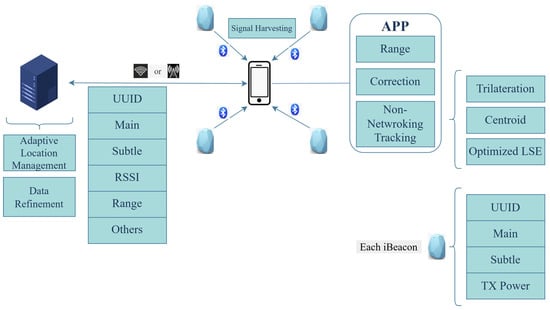
Figure 10.
BLE positioning technology.
The collected RSSI data are processed using an improved least square estimation (LSE) approach. This method refines the position estimates by minimizing the errors introduced by signal attenuation and interference. The system achieves a localization accuracy of up to 12 cm, making it suitable for applications requiring precise tracking. BLE iBeacons are installed at strategic locations within the healthcare facility. Their positions are predefined and used as reference points for localization. BLE-enabled devices capture the RSSI values from the iBeacons and transmit these data to a central server for processing [17].
The server processes the RSSI data using the improved LSE algorithm to estimate the real-time location of the user or asset. These location data are then relayed to a user interface, such as a mobile application or a web dashboard. The estimated locations are displayed in real time on a grid, 2D map, or 3D map. Additional sensor data, such as heart rate or fall detection, can also be processed and displayed to healthcare staff for enhanced monitoring and patient safety. The system can be integrated with additional sensors, such as accelerometers, gyroscopes, and heart rate monitors, to provide comprehensive healthcare monitoring. For instance, the system can detect falls or monitor vital signs and send alerts to healthcare providers, improving patient safety and response times. This BLE-based RTLS provides a cost-effective and accurate solution for indoor localization in healthcare settings. By leveraging iBeacons and improved LSE algorithms, the system achieves high-resolution tracking, enhancing workflow efficiency, patient safety, and resource management within hospitals [17].
3.1.3. IoT-Based Healthcare Applications
Farahsari et al. [27] proposed an indoor positioning system, as illustrated in Figure 11, that focuses on providing accurate localization within IoT-based environments, addressing the challenges of real-time tracking and data integration. The system comprises two primary components: fixed reference nodes (RNs) and mobile nodes (MNs). The RNs serve as anchors with known coordinates, while the MNs are wearable devices or tags that need to be localized. The architecture employs various positioning techniques such as lateration, angulation, and fingerprinting to determine the MN’s position based on signal measurements.
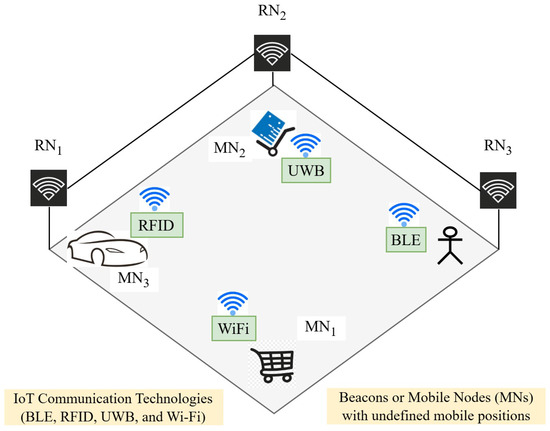
Figure 11.
IPS configuration with RNs and MNs using advanced localization technologies.
First, the MN receives signals from multiple RNs, capturing data such as the RSSI and TOA. These measurements are then processed using machine learning algorithms, such as ANNs and deep neural networks (DNNs), to improve accuracy. Advanced filtering techniques, such as Kalman filters and particle filters, are used to minimize noise and refine the localization estimates. The data are then sent to a cloud or edge server for further processing and analysis, enabling real-time feedback and decision-making. The system also supports hybrid positioning approaches by integrating multiple technologies, such as BLE, Wi-Fi, UWB, and RFID, to enhance reliability and adaptability in dynamic environments. This multi-technology approach addresses challenges like signal attenuation, multipath interference, and NLOS conditions. For healthcare applications, the system can integrate with sensor networks (e.g., accelerometers and heart rate monitors) to provide health monitoring and fall detection capabilities [27].
In addition to its positioning capabilities, the architecture enables data fusion from diverse IoT devices and incorporates artificial intelligence for behavior analysis and predictive maintenance. This is demonstrated in Figure 12, which illustrates the Positioning System Classification for IoT-Based Healthcare Applications. The flexibility of the system allows it to be deployed in diverse environments, such as hospitals, industrial facilities, and military operations, improving safety, efficiency, and resource management [27].
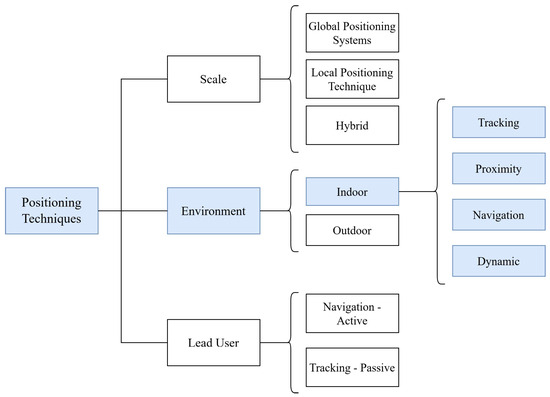
Figure 12.
Positioning System Classification for IoT-Based Healthcare Applications.
3.1.4. Hybrid Systems for Critical Situations
Mahdi et al. [58] proposed a hybrid indoor localization system architecture that combines multiple techniques, which is shown in Figure 13, to improve accuracy, robustness, and adaptability in various environments. The system operates in two distinct modes: an infrastructure-dependent mode and an infrastructure-independent mode. The infrastructure-dependent mode relies on WLAN signals and smartphone sensors for accurate positioning, leveraging Wi-Fi access points as reference points to correct drift in Pedestrian Dead Reckoning (PDR). In cases where Wi-Fi signals are unavailable, the system switches to the infrastructure-independent mode, using only smartphone sensors to track movement through PDR. This ensures continuous localization even in environments where Wi-Fi infrastructure is limited or disrupted [58].
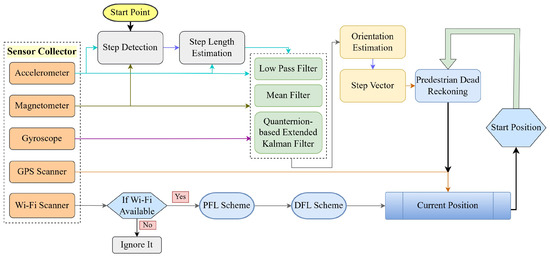
Figure 13.
System architecture of the hybrid model.
The system uses a smartphone-based sensor collector equipped with an accelerometer, magnetometer, gyroscope, and Wi-Fi scanner to collect movement and environmental data. The localization process begins with step detection and step length estimation, facilitated by the accelerometer. To reduce noise and random errors, the system applies low-pass filters and mean filters to the sensor data. For determining the user’s orientation, a Quaternion-based Extended Kalman Filter (EKF) is used, which enhances heading accuracy by fusing data from the magnetometer and gyroscope [58].
When Wi-Fi signals are available, the system enhances positioning accuracy using trilateration based on Wi-Fi access points. The system intelligently fuses data from PDR and WLAN fingerprinting to maintain accurate positioning, even in dynamic or partially obstructed environments. The real-time position is continuously updated, ensuring a low error rate and reliable localization. This hybrid approach allows the system to adapt to varying conditions, making it highly suitable for applications such as emergency evacuations, healthcare environments, and other critical indoor scenarios. By seamlessly switching between localization modes based on Wi-Fi availability, the system achieves consistent performance, scalability, and robustness, ensuring reliability in diverse and challenging environments [58].
3.2. Transforming Industrial Operations with Indoor Localization Technologies
3.2.1. UWB-Based Indoor Localization for Industrial Environments
Karaagac et al. [26] evaluate the performance of two indoor localization technologies—UWB and BLE—in a real-world industrial environment. The goal is to assess their accuracy, reliability, and scalability under dynamic conditions often found in industrial settings, such as the presence of metallic structures, moving objects, and signal interference. The study was conducted in the Royal FloraHolland Flower Auction Center in the Netherlands. The testing area covered a large section of the facility, including auction halls, storing zones, buffering zones, and distribution zones. These areas presented challenges such as multipath interference, shadowing, and NLOS conditions caused by the continuous movement of flower trolleys, workers, and machinery [26].
The anchors were installed at a height of 5.6 m, covering a 60 × 46 m area. The system utilized time-of-flight (TOF) measurements to determine the distance between the tag and the anchors. The position of the tag was calculated using a multi-lateration algorithm. The UWB system’s performance was evaluated for ranging accuracy, positioning accuracy, and update rate. The system provided update rates between 5 and 50 Hz for a single tag, with the rate divided proportionally when multiple tags were tracked simultaneously [26].
The BLE-based system used five anchor nodes positioned along the sides of the measurement area, with BLE tags mounted on the flower trolleys. This system estimated positions using the AoA method, where the anchors measured the angle at which the signal arrived. The BLE system was evaluated for coverage range, typically achieving a range of 11–15 m from the nearest anchor. The system’s positioning accuracy was measured in both static and dynamic conditions, with static scenarios achieving accuracy around 20 cm. Additionally, the BLE’s latency was low, with update rates up to 100 Hz and delays as short as 100 ms [26].
Several evaluation scenarios were designed to measure system performance, which are shown in Figure 14. The static ranging accuracy test measured the distance between the tag and the anchor under line-of-sight (LOS) conditions, while the dynamic environment test assessed accuracy when objects and people obstructed the signal path. The positioning with mobility scenario evaluated the system’s ability to track a moving tag along a predefined path, and the multiple tags tracking scenario tested scalability when monitoring several tags simultaneously. Additionally, the operational range of the localization system and its coverage capabilities for positioning applications were investigated. For this purpose, ranging measurements between the tag and a single anchor were collected at different distances, maintaining LOS, until reaching the system’s maximum operational range. These measurements were conducted using the 3244.8–3744 MHz frequency band for ranging signals, with a preamble length of 4096 and a bit rate of 110 kbps [26].
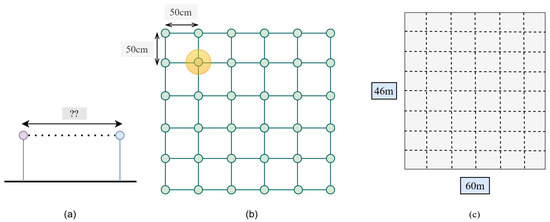
Figure 14.
Scenario analysis for UWB localization positioning method. (a) Precision of ranging; (b) position detection precision; and (c) localization precision in dynamic environments.
The key findings revealed that UWB provided high accuracy, often within sub-meter precision, and demonstrated robustness against multipath interference, making it suitable for critical industrial applications. In contrast, BLE offered reasonable accuracy at a lower installation cost but required a denser deployment of anchors to achieve optimal performance. Both systems faced challenges with NLOS conditions and dynamic obstructions. The study highlighted that scalability and deployment costs were critical factors influencing the choice of technology for specific industrial use cases. This evaluation provides valuable insights into the strengths and weaknesses of UWB and BLE for industrial indoor localization, helping industries choose the most appropriate technology for their specific tracking needs [26].
3.2.2. RFID-Based Methodology for Construction Sites
Montaser et al. [59] introduce a low-cost indoor localization and material tracking system using ultra high frequency (UHF) passive RFID technology, specifically designed for construction projects. This system aims to automate the tracking of materials, workforce, and equipment in near real-time to improve project management and operational efficiency. The methodology relies on strategically placed RFID reference tags and mobile RFID readers carried by workers to capture location data.
The system architecture consists of several key components, as shown in Figure 15, integrating RFID reference tags, mobile RFID readers, and a positioning database to enable user and material localization. RFID reference tags are strategically placed across predefined zones, serving as landmarks with known locations. Workers carry mobile RFID readers, which detect signals from passive RFID tags and capture RSSI values. The collected data, including tag IDs, RSSI values, worker movements, and timestamps, are stored in a relational database for efficient retrieval and analysis. The process begins with Step One, where the system updates the position and applies trilateration or proximity-based localization to determine the user’s location. Once the user is located, the system moves to Step Two, focusing on material localization. Using the positioning database, it retrieves location data, applies trilateration or proximity-based localization, and identifies the material’s position. This methodology ensures precise tracking of users and materials, making it highly applicable in construction, logistics, healthcare, and industrial environments, where RFID-based positioning enhances operational efficiency.
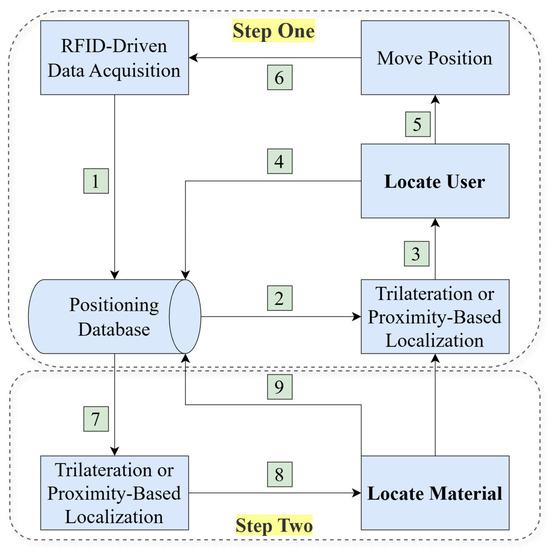
Figure 15.
Development methodology of RFID system.
Two primary localization methods are employed to determine the position of workers and materials. Figure 16 illustrates the optimized deployment of RFID reference tags and its flowchart. The first method, triangulation, estimates a worker’s position by measuring distances to multiple reference tags based on RSSI values. These distances are represented as circles centered on the known locations of the reference tags. The worker’s location is determined by finding the intersection of these circles, and the area with the smallest sum of radii is selected to minimize errors. The second method, proximity-based localization, estimates the worker’s position by identifying the closest reference tags and calculating a weighted average of their coordinates based on RSSI values [59].
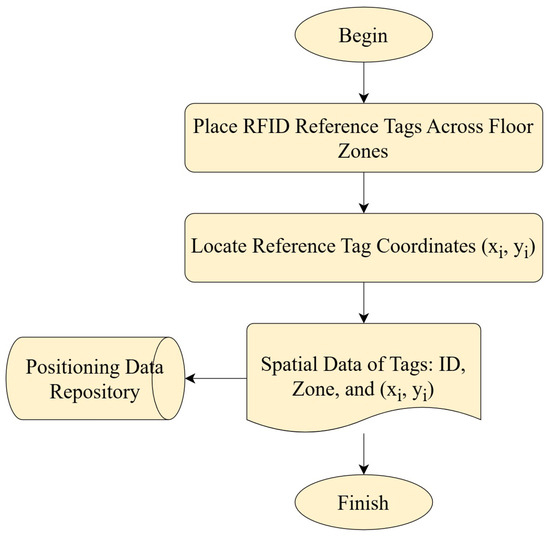
Figure 16.
Optimizing the deployment of RFID reference tags.
The system follows a two-step algorithm for tracking. In the first step, the mobile RFID reader captures signals from the reference tags to identify the worker’s location, which is then stored in the database along with a timestamp. In the second step, materials tagged with RFID labels are tracked by associating their location with the worker’s identified position. As workers move through the site, the system captures signals from material tags and uses either the triangulation or proximity method to determine the material’s location. The methodology was validated through experiments conducted on a real construction site and in a controlled laboratory environment. Five test beds were set up to cover various areas and time spans. The results showed a mean error of 1.0 m for worker localization using triangulation and 1.9 m for material tracking. The proximity method produced a mean error of 1.9 m for worker localization and 2.6 m for material tracking. Additionally, the system demonstrated 100% accuracy in identifying the correct zones for both workers and materials. This approach offers a cost-effective and low-maintenance solution for tracking materials and workforce in dynamic construction environments. By automating the tracking process, the system enhances real-time decision-making, improves project management, and ensures greater efficiency on construction sites [59].
3.2.3. Bluetooth-Based System for Industrial Environments
Szyc et al. [60] proposed an indoor localization system that focuses on using BLE technology for tracking assets in large industrial environments with minimal infrastructure. The primary objective of the system is to achieve practical localization accuracy while maintaining simplicity and cost-effectiveness. The system leverages RSSI measurements to estimate the positions of BLE tags attached to assets, animals, or equipment. To address the challenges of dynamic and obstacle-rich industrial environments, the system adopts range-free localization techniques, which rely on relative signal strengths and geometric properties rather than direct distance measurements.
Figure 17 shows the system architecture, which consists of several key components. BLE tags are attached to the objects to be tracked, and they continuously broadcast BLE signals. These signals are received by anchor nodes, which are fixed Raspberry Pi-based devices placed strategically across the industrial environment. The anchor nodes measure the RSSI values of the incoming signals and send these data to a central server for processing. The server uses the collected RSSI data to estimate the location of the tags using one of the proposed localization algorithms.
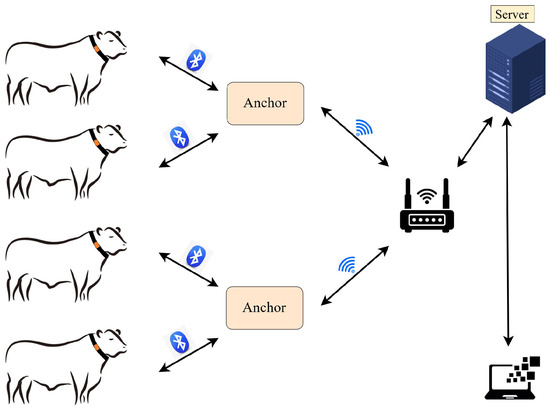
Figure 17.
Field testing of localization algorithms in a cattle monitoring framework.
Three localization algorithms are employed to cater to different levels of complexity and accuracy requirements. The Ring Algorithm converts RSSI measurements into distance ranges (or rings) around each anchor. The location of the tag is estimated based on the intersection of these rings, with weights assigned according to the reliability of each signal. The Sectional Algorithm divides the tracking area into predefined zones and estimates the tag’s location by identifying the zone with the strongest signal strength. This method is particularly useful when precise positioning is not required. The Mass Algorithm treats the RSSI values as weights, calculating the tag’s position as the center of mass of these weighted signals, striking a balance between simplicity and accuracy.
To improve the reliability of localization, the system aggregates RSSI measurements over 30-s time windows to mitigate the impact of signal variations. Figure 18 shows the evaluation area with anchor and section markings of the system module. This approach reduces inaccuracies caused by multipath propagation, obstacles, and dynamic changes in the environment. The system was tested in a 1600 m² cowshed, where 10 anchors were deployed to track BLE tags attached to cows.
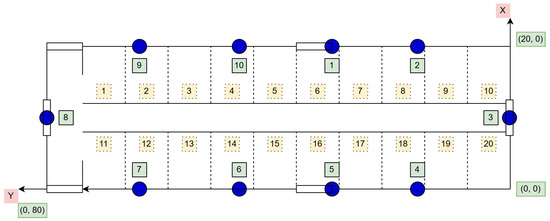
Figure 18.
Layout of the evaluation area with anchor locations (blue circles) and section markings (numbered squares). Blue circles indicate anchor points (1–10), while numbered squares (1–20) represent predefined sections used for localization and tracking analysis.
The real positions of the cows were manually recorded to evaluate the system’s accuracy. Despite challenges such as signal attenuation caused by the animals’ bodies and the presence of obstacles, the system achieved an average localization error of less than 8 m. Figure 19 illustrates the process of handling aggregated measurements and inputting localization data, showing how the system processes and integrates sensor information for accurate position estimation [60].
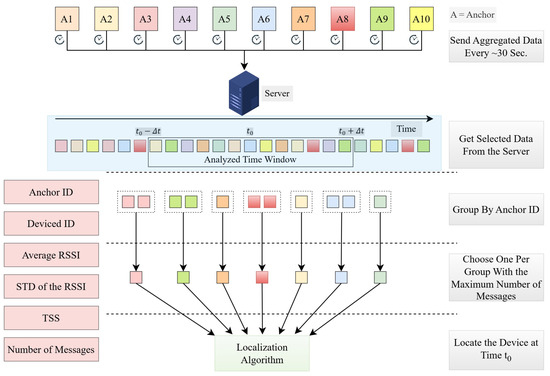
Figure 19.
Aggregated measurement handling and localization input process.
The methodology addresses the key challenges of industrial environments, such as dynamic changes, limited infrastructure, and signal interference. By using a minimal number of anchors and adopting robust algorithms, the system ensures cost-effective deployment and reliable tracking in challenging conditions. This BLE-based indoor localization system provides a practical solution for industries seeking to enhance asset management and operational efficiency without extensive infrastructure investments.
3.2.4. Fast and Robust Wi-Fi Localization Methodology for Dynamic Industrial Environments
Cheng et al. [61] proposed a Wi-Fi-based localization system that offers accurate and fast indoor positioning for large and dynamic environments, such as exhibition venues. The system leverages RSSI values from Wi-Fi signals to estimate the positions of mobile devices. This approach minimizes setup time, employs customized localization models, and uses dynamic resolution control to balance accuracy and processing load efficiently.
Figure 20 shows the system architecture consists of three primary components: Wi-Fi sniffers, mobile devices, and a central server. The Wi-Fi sniffers are ordinary Wi-Fi routers configured to detect packets transmitted by mobile devices and measure their RSSI values. These sniffers are strategically placed throughout the venue and connected to a central server through a local area network (LAN) or wireless connections. The mobile devices, such as smartphones, continuously communicate with the APs in the venue, broadcasting Wi-Fi packets. The sniffers capture the RSSI values from these packets for further processing.
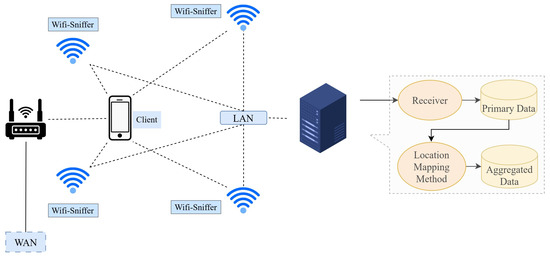
Figure 20.
Framework of the proposed Wi-Fi-based localization approach.
The central server acts as the core processing unit. It collects RSSI data from the sniffers and processes them using a customized localization model tailored to the specific characteristics of each mobile device. The server employs an expectation maximization (EM) algorithm to iteratively refine the localization model and estimate device positions. This dynamic refinement improves the accuracy of the localization by continually updating the signal strength-to-distance model based on incoming data.
The system uses a piecewise linear model to convert RSSI values into estimated distances between the mobile device and the sniffers. This model consists of three linear segments, each covering different RSSI ranges, allowing for flexibility and improved accuracy in diverse environments. The model is customized for each device to account for variations in transmission characteristics. Additionally, a weighting mechanism prioritizes sniffers with stronger RSSI values, ensuring that reliable measurements have a greater impact on the final position estimate.
To optimize performance, the system incorporates dynamic resolution control by dividing the venue into a grid of cells. The grid resolution can be adjusted dynamically: finer grids offer higher localization accuracy but require more processing power, while coarser grids reduce computational load, enabling the system to track more devices simultaneously. This flexibility allows the system to adapt to real-time demands and server capacity. The localization process uses a grid search optimization approach to estimate the device’s position. The system searches for the grid cell that minimizes the error between the estimated distances and the actual distances to the sniffers. The search begins with the grid cell corresponding to the strongest RSSI value, which helps reduce computational complexity and improve efficiency.
One of the system’s key advantages is its short setup time. Unlike traditional Wi-Fi fingerprinting methods, which require extensive training data, this system does not need an explicit training phase. This makes it particularly useful for temporary setups, such as exhibition venues, where rapid deployment is crucial. The system’s customized localization models also ensure adaptability to different mobile devices, making it robust for real-world applications. In terms of performance, the system achieves a mean localization error of approximately 1.7 m, demonstrating its accuracy and efficiency. The combination of RSSI-based distance estimation, dynamic resolution control, and iterative model refinement allows the system to deliver reliable and scalable indoor positioning in dynamic and large-scale environments.
3.3. Strategic Insights: Indoor Localization in Military Applications
3.3.1. UWB-Based Methodology for Military and Emergency Operation
Vey et al. [36] introduced the Poucet system, a robust indoor positioning solution designed for military and firefighter operations, particularly in environments where GNSS signals are unavailable. This system combines multiple technologies, including GPS, long-range radio (LoRa) operating in the 868 MHz and 2.4 GHz bands, UWB, and altimeters, to ensure accurate and continuous localization. Figure 21 illustrates the communication framework for LoRa-2.4 GHz nodes, demonstrating the exchange of signals between the Host and Responder nodes via signal preambles, packet headers, and range indicators. By integrating these technologies, the Poucet system can adapt to complex and dynamic operational scenarios.
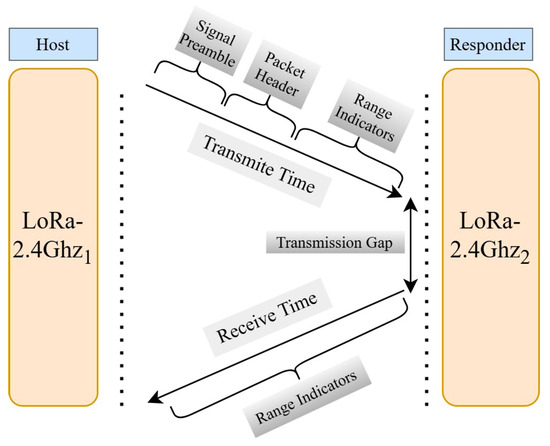
Figure 21.
Communication framework for LoRa-2.4GHz nodes.
The hardware architecture consists of four primary types of nodes. Trackers are worn by soldiers or firefighters and are equipped with transceivers for GPS, LoRa, UWB, and altimeter modules. These trackers are lightweight and portable, allowing agents to carry them easily during missions. Beacons are deployed strategically around the operational area to serve as reference points, providing an absolute positioning system by leveraging GPS and LoRa communications. Additionally, pebbles are small nodes carried by agents and deployed at key locations within buildings to enhance the indoor positioning network through LoRa and UWB ranging. Lastly, dust nodes (DNs) are portable UWB-enabled devices that can be deployed in large numbers to create a dense localization network within the operation area.
The software architecture of the Poucet system uses a publish–subscribe MQTT bus for communication between the nodes. It comprises several key services, including input/output services that handle communication with transceivers and sensors, publishing raw data to the MQTT bus. Computation services process these data to generate location estimates, such as altitude measurements, LoRa-based distance calculations, and sensor fusion outputs. Additionally, logging services store data for later analysis and debugging, ensuring all messages are tagged with metadata like timestamps and quality of service.
The Poucet system employs a combination of localization techniques to provide reliable positioning. For long-range localization, the system uses LoRa 868 MHz communication, which can penetrate walls and floors. Beacons deployed outside the buildings serve as reference points, and distances are estimated based on signal attenuation using a weighted attenuation algorithm. For medium-range localization, LoRa 2.4 GHz is used, offering coverage of up to 50 m indoors with distance estimation based on TOF ranging. For short-range, high-precision localization, the system leverages UWB technology. UWB measures the time of flight between trackers and dust nodes or pebbles using a Two-Way Ranging (TWR) protocol, achieving centimeter-level accuracy. Additionally, altimeters are used to measure atmospheric pressure for altitude sensing. The system broadcasts corrections from stationary beacons to ensure consistent and accurate altitude measurements throughout the mission.
To integrate data from multiple technologies, the system employs a multi-input sensor fusion algorithm based on the Uncertainty Weighted Localization (UWL) method. This algorithm optimizes position estimates by treating discrepancies between nodes as attractive or repulsive forces. Local optimizations occur within each node, while global optimizations are achieved through data exchanges between nodes, ensuring high reliability and accuracy in the overall positioning system. This hybrid approach allows the Poucet system to deliver reliable and accurate localization in GNSS-denied environments. By combining GPS, LoRa, UWB, and altimeter data, and employing advanced sensor fusion algorithms, the system provides flexibility, robustness, and adaptability for critical military and firefighter operations.
3.3.2. ZigBee-Based System for Military Applications
Luoh et al. [62] proposed an indoor positioning system (IPS) that utilizes ZigBee technology combined with an ANN, specifically a Radial Basis Function Network (RBFN), to achieve accurate, low-cost, and energy-efficient localization. This system is designed for deployment in various environments, including healthcare facilities, industrial settings, and military operations, where reliable indoor positioning is crucial.
The system architecture consists of several key components. ZigBee sensor nodes are strategically placed within the environment to serve as reference points. Figure 22 has the detailed information of the system function. These nodes measure the RSS or Link Quality Indicator (LQI) of signals transmitted by a target node, which can be a device carried by a person or attached to an object. The target node continuously broadcasts signals, which are received by the sensor nodes for localization purposes. ZigBee technology is chosen for its low power consumption, low cost, and mid-range communication capabilities, making it suitable for scalable and flexible deployments in environments with power constraints. The localization process is divided into two main phases: the offline phase and the real-time phase. In the offline phase, the system maps the environment by collecting RSS or LQI measurements at predefined sampling points. This dataset is used to train the Radial Basis Function Network (RBFN), allowing the network to learn the relationship between signal strength and the corresponding location. The RBFN adjusts its parameters, such as cluster centers and standard deviations, using a competitive learning algorithm to improve accuracy.
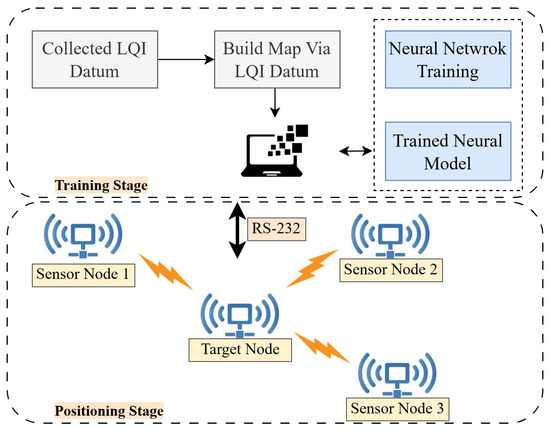
Figure 22.
Detailed block diagram of system functions.
In the real-time phase, the trained RBFN processes new RSS or LQI measurements from the ZigBee nodes to estimate the position of the target node. To enhance accuracy, the system applies signal preprocessing techniques, averaging the collected signal values to reduce the effects of environmental noise and temporary obstructions. This ensures that the data fed into the RBFN are stable and reliable. The system achieves an average localization error of 1.47 m under ideal conditions and 2.8 m in typical environments. The system is implemented using the FT-6250/FT-6251 ZigBee development kit, which features a 32-bit RISC processor and operates on the 2.4 GHz IEEE 802.15.4 communication protocol [62]. The software for the system is developed in C/C++, and data communication between nodes follows a polling approach to prevent signal congestion and ensure smooth data transmission.
The network topologies supported by the system include the star, tree, and mesh topologies, allowing for flexible deployment based on the specific requirements of the environment. In the star topology, a central coordinator communicates with multiple end devices. In the tree topology, nodes are organized hierarchically, while in the mesh topology, nodes are interconnected, providing multiple communication paths and increasing the robustness of the system.
This combination of ZigBee wireless technology and the RBFN algorithm offers a reliable, cost-effective, and scalable solution for indoor positioning. The system is well-suited to environments where the accurate and continuous tracking of assets, personnel, or equipment is essential, such as in healthcare facilities, industrial settings, and military operations.
3.3.3. Wi-Fi-Based Two-Level Indoor Localization for Hazardous Area Monitoring
Li et al. [63] proposed a system that utilizes a two-level Wi-Fi fingerprint-based indoor localization approach specifically designed for monitoring dangerous areas. The system aims to provide accurate and efficient real-time positioning by leveraging RSSI data collected from Wi-Fi networks. The architecture is divided into two primary phases: an offline phase and an online phase.
In the offline phase, RSSI data are collected multiple times from various locations within the target environment to build a reliable fingerprint database, which has been shown in Figure 23 in the flowchart of both the online and offline scenarios. To minimize fluctuations caused by environmental factors such as temperature, humidity, and multipath effects, the collected data undergo Gaussian filtering for preprocessing. The filtered RSSI data are then clustered into multiple sub-databases using the Affinity Propagation Clustering (APC) algorithm, which groups the data based on similarity. Instead of using traditional Euclidean distance, the clustering process employs the Shepard similarity metric, which is better suited to RSSI data due to the non-linear relationship between signal strength and physical distance.
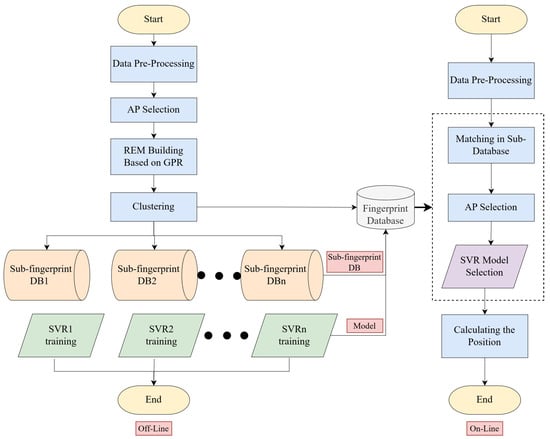
Figure 23.
The fundamentals of localization algorithms for the online and offline scenarios.
After clustering, each sub-database is used to train a support vector regression (SVR) model. To optimize the performance of the SVR model, parameters such as kernel width, penalty factor, and error tolerance are fine-tuned using the particle swarm optimization (PSO) algorithm. The optimized models are then stored for use during the online phase. In the online phase, real-time RSSI data are collected from mobile devices or nodes carried by personnel operating in the dangerous area. The real-time data are preprocessed in the same way as during the offline phase to ensure consistency. The localization process begins with coarse localization, where the current RSSI fingerprint is compared with the cluster centers in the fingerprint database. The sub-database that most closely matches the current data is selected for further processing.
Once the appropriate sub-database is identified, fine localization is performed using the PSO-optimized SVR model. Figure 24 illustrates the schema and functionality of the positioning system in a chemical workshop, highlighting how the system operates to ensure accurate localization within the workshop environment. The model processes the refined data to estimate the precise location of the mobile device, achieving high localization accuracy. The system is capable of running the trained SVR model locally on portable devices such as Raspberry Pi equipped with Wi-Fi modules like ESP8266. The device can then provide real-time location updates and issue alerts if personnel enter hazardous zones.
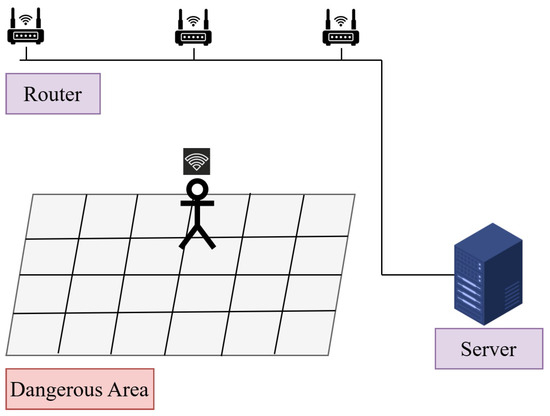
Figure 24.
Schema of the positioning system in a chemical workshop.
The overall system architecture features wireless routers as anchor points and a cloud server for clustering and model training. The trained models are sent back to the mobile device for real-time localization, ensuring portability and efficiency. This two-level approach optimizes computational complexity by narrowing the search space through clustering before performing detailed localization. The system offers several advantages, including high accuracy, efficiency, and scalability. The combination of clustering and regression techniques reduces the computational load during real-time positioning while maintaining precision. The use of portable hardware and cloud-based processing makes the system adaptable to dynamic and hazardous environments, making it a valuable tool for safety monitoring and management in dangerous areas.
3.3.4. BLE Indoor Positioning for UAVs in Military Operations
Ariante et al. [64] proposed a system that utilizes a BLE beacon-based IPS specifically designed for small Unmanned Aerial Systems (UASs) or drones operating in environments where GNSS signals are unavailable. The system aims to deliver accurate, real-time localization using low-cost and energy-efficient components. Figure 25 demonstrates the optimization of positioning using BLE beacon triangulation. The architecture consists of BLE beacons, an onboard receiver, and a computer for data processing.
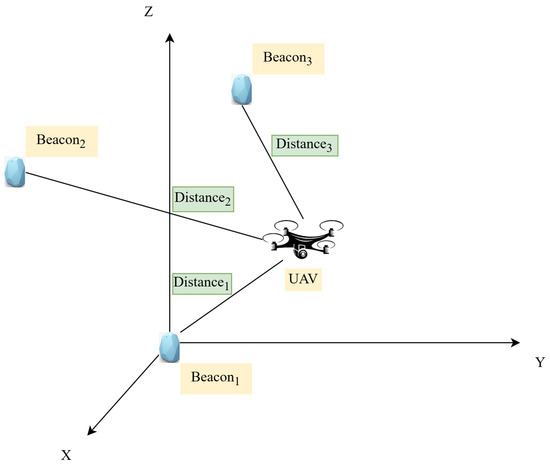
Figure 25.
Optimizing positioning with BLE beacon triangulation.
The system uses BLE beacons (nRF51822) as fixed transmitters placed at known positions throughout the indoor environment. These beacons broadcast signals at regular intervals, sending advertisement packets that include a unique ID and the RSSI value. Figure 26 explores the architecture of the system framework, providing a detailed overview of its components. The onboard receiver is an Arduino Nano 33 BLE microcontroller, which is mounted on the drone to capture these BLE signals. The Arduino Nano 33 BLE is equipped with a 32-bit ARM Cortex-M4 processor and supports BLE communication, making it suitable for real-time positioning due to its low power consumption and efficient processing capabilities.

Figure 26.
Exploring the architecture of the system framework.
The localization methodology relies on RSSI-based distance estimation and trilateration to determine the drone’s position. First, the onboard receiver collects the RSSI values from the surrounding BLE beacons. These values represent the strength of the signals received and are used to estimate distances between the drone and each beacon. The conversion from to distance is performed using a logarithmic path-loss model that accounts for signal attenuation. The formula used for this conversion is:
where d is the estimated distance, A is the reference RSSI value at 1 m, and n is the path-loss exponent reflecting the characteristics of the indoor environment.
Once the distances are estimated, the system employs trilateration to compute the drone’s position. Trilateration uses distance measurements from at least three BLE beacons with known coordinates to determine the precise location of the drone. To further improve accuracy, the system applies a 1D Kalman filter to the RSSI values, which helps reduce noise, signal drift, and multipath interference. The Kalman filter smooths the data, resulting in more stable and reliable distance measurements. The filtered RSSI values are processed by the trilateration algorithm to estimate the drone’s position in real time. These calculations were carried out on a connected computer using MATLAB (MathWorks, Natick, MA, USA) and RealTerm (RealTerm Open Source Terminal), which handled signal processing and position estimation.
The data are transmitted between the Arduino and the computer via a USB connection, and the RealTerm software is used to log data for post-processing and analysis.
The system was tested in an indoor environment with BLE beacons deployed at specific locations. The results demonstrated that applying the Kalman filter significantly improved localization accuracy. The positioning error was reduced from over 50 cm to less than 20 cm after filtering. This BLE-based IPS offers a low-cost, energy-efficient solution for real-time drone localization in GNSS-denied environments, making it suitable for applications in industrial, military, and emergency response settings. Future improvements may include integrating BLE with additional technologies like Wi-Fi and inertial measurement units (IMUs) to further enhance accuracy and robustness.
4. Challenges in Indoor Localization Systems
4.1. Signal Interference and Multipath Effects
One of the primary challenges in indoor localization systems is signal interference and multipath propagation. Environments like hospitals, industrial settings, and military operations often have metallic surfaces, dense obstructions, and dynamic conditions that reflect and scatter signals, causing localization errors. For instance, in industrial environments, heavy machinery and metal obstructions significantly impact BLE and Wi-Fi-based systems, reducing their accuracy and reliability [26,60]. Similarly, in healthcare settings, Wi-Fi signals suffer from interference caused by medical devices and dense infrastructure, which can affect real-time tracking performance [62].
Multipath effects are particularly problematic for RFID and UWB-based systems. In healthcare applications, RFID tracking of patients or equipment can be disrupted by reflections from walls, beds, and other equipment, leading to inconsistent readings [23]. To mitigate these issues, advanced algorithms like machine learning-based filtering and data fusion techniques are employed to improve accuracy [60].
4.2. NLOS Conditions
NLOS conditions pose a significant challenge, particularly in military and emergency response operations. In GNSS-denied environments, such as urban warfare zones or collapsed buildings, signals from RFID, UWB, and ZigBee systems can be obstructed by walls, debris, and other obstacles [36]. For example, the Poucet system integrates multiple technologies like GPS, LoRa, and UWB to maintain reliable tracking despite NLOS conditions [36]. In healthcare, NLOS issues arise when tracking patients through dense hospital corridors or rooms, necessitating hybrid solutions to ensure continuous localization [17].
4.3. Scalability and Infrastructure Limitations
Deploying localization systems in large environments, such as hospitals, warehouses, or industrial plants, requires significant infrastructure investment. Wi-Fi-based RTLSs can leverage existing infrastructure, but as the number of tracked assets increases, network congestion and bandwidth limitations can degrade performance [62]. Similarly, BLE and ZigBee systems may need a dense deployment of anchors or beacons to achieve reliable coverage, which can increase installation costs and complexity [22].
In military applications, deploying infrastructure in unknown or hostile environments is impractical. Systems like distributed UWB or ZigBee networks are used to minimize reliance on pre-installed infrastructure [36]. Additionally, RFID systems in industrial settings face challenges related to the need for frequent recalibration and the placement of readers to cover large, dynamic areas [26].
4.4. Power Consumption and Battery Life
Battery life is a critical concern for wearable and mobile localization devices. BLE and ZigBee are favored for their low power consumption, making them suitable for long-term tracking in healthcare and industrial settings [62,65]. However, more precise technologies like UWB require higher power, limiting their use in battery-operated devices unless optimized power management techniques are employed [26]. In military operations, where devices need to function for extended periods without recharging, balancing power efficiency with accuracy is essential [36].
4.5. Privacy and Security Concerns
In healthcare environments, tracking systems must comply with regulations to protect patient privacy. The continuous tracking of patients, staff, and assets raises concerns about data breaches and unauthorized access [23]. Encryption protocols, access controls, and anonymization techniques are necessary to ensure data security. Similarly, in military applications, the risk of adversaries intercepting localization data necessitates robust encryption and tamper-proof hardware [30].
4.6. Environmental and Corrosion Factors
In industrial applications, environmental conditions such as temperature, humidity, and corrosive agents can degrade the performance of localization systems. For example, RFID-sensitive tags designed to detect environmental corrosiveness need to be resistant to nanometer-scale metal degradation [23]. These tags are critical for asset tracking in harsh environments where equipment reliability is paramount.
4.7. Computational Complexity
Advanced localization systems that integrate deep learning algorithms, such as LSTM networks for UWB, face challenges related to computational load and real-time processing [60]. In resource-constrained environments, such as emergency response operations, ensuring real-time performance without overburdening the system is crucial. Optimization techniques and efficient hardware implementations are needed to address these issues [65].
4.8. Accuracy Trade-Offs
Different localization technologies offer varying levels of accuracy. Wi-Fi-based systems typically provide zone-level accuracy, while BLE can achieve room-level precision [17]. For applications that require centimeter-level accuracy, such as tracking critical patients in intensive care units or soldiers in urban combat, hybrid solutions combining UWB and RFID are often necessary [22]. However, achieving high accuracy usually comes at the cost of increased infrastructure, power consumption, and computational complexity.
4.9. Dynamic Environments
Dynamic environments, such as busy hospitals, factories, or military zones, introduce unpredictable changes that can affect localization accuracy. BLE and ZigBee systems in industrial settings must cope with the constant movement of people, machinery, and goods, which can disrupt signal propagation [60]. Adaptive algorithms and sensor fusion techniques help maintain localization reliability despite these changes [36].
5. Future Research Directions
As indoor localization technologies continue to evolve, several areas demand further research to address existing challenges and enhance system performance across healthcare, industrial, and military domains. The integration of advanced technologies, optimization techniques, and security measures will play a pivotal role in shaping the future of RTLSs.
5.1. Hybrid Localization Systems
Future research should focus on developing hybrid localization systems that combine multiple technologies such as Wi-Fi, BLE, UWB, RFID, and ZigBee. By leveraging the strengths of each technology, hybrid systems can overcome individual limitations related to accuracy, signal interference, and power consumption. For example, integrating UWB with BLE can provide high precision while maintaining energy efficiency, making it suitable for wearable devices in healthcare and military applications [17].
5.2. Artificial Intelligence and Machine Learning Integration
The application of ML and deep learning techniques in indoor localization holds significant promise for improving accuracy and adaptability. Algorithms such as LSTM networks and SVR can process large datasets and mitigate issues like NLOS conditions and multipath interference [36,60]. Future research should focus on optimizing these models to reduce computational complexity and enhance real-time performance, particularly in dynamic environments like hospitals, warehouses, and military zones.
5.3. Energy-Efficient Localization
Battery life remains a critical limitation for wearable and mobile localization devices. Research should aim to develop low-power localization techniques that extend the operational lifespan of devices without sacrificing accuracy. Innovations in energy harvesting, such as utilizing ambient light, motion, or thermal energy, can help power devices in resource-constrained environments [65]. Additionally, optimizing protocols for technologies like BLE and ZigBee can further reduce power consumption while maintaining reliable performance [22].
5.4. Enhancing Scalability and Infrastructure Optimization
Scalability remains a significant challenge for large-scale deployments of RTLSs in healthcare facilities, industrial plants, and military operations. Future research should explore techniques to improve the scalability of systems, such as developing distributed localization algorithms that minimize reliance on central servers [26]. Utilizing existing infrastructure, like nurse call networks in hospitals or Wi-Fi networks in industrial settings, can reduce deployment costs and enhance system efficiency [62].
5.5. Robustness in Dynamic and Harsh Environments
Indoor localization systems must adapt to constantly changing conditions, such as moving machinery in industrial plants, crowded hospital corridors, and combat environments. Research should focus on developing adaptive algorithms capable of real-time calibration and recalibration to maintain accuracy despite environmental changes [65]. Robust hardware designs, such as RFID-sensitive tags that detect metal corrosion or UWB modules resilient to interference, will further enhance reliability in harsh conditions [23,26].
5.6. Addressing Privacy and Security Concerns
With the increasing use of localization technologies in healthcare and military applications, ensuring data privacy and system security is essential. Future research should explore advanced encryption techniques, tamper-proof hardware, and blockchain-based solutions to protect sensitive location data [23,30]. Compliance with privacy regulations for healthcare environments should be a core consideration in designing secure RTLSs.
5.7. IoT and Cloud Integration
The integration of IoT and cloud computing with indoor localization systems offers vast potential for real-time data collection, storage, and analysis. Future research should focus on developing efficient cloud-based platforms that support predictive analytics, automated decision-making, and remote monitoring [23]. For example, IoT-enabled RFID and UWB systems can provide real-time tracking of assets and patients while offering advanced analytics to optimize hospital workflows and industrial operations [17].
5.8. Enhanced Localization for Special Populations
Developing localization systems tailored for special populations, such as Alzheimer’s patients or mobility-impaired individuals, is a critical area of future research. High-accuracy systems integrated with wearable devices and AI algorithms can enhance patient safety by providing continuous monitoring and timely alerts for wandering or emergency situations [60].
5.9. Standardization and Interoperability
Ensuring standardization and interoperability among different localization technologies will be essential for widespread adoption. Research should focus on developing unified frameworks and protocols that allow seamless communication and data exchange between different RTLS systems, regardless of the underlying technology [36].
6. Conclusions
Indoor localization systems, with applications in healthcare, industrial operations, military missions, and emergency response scenarios, have undergone a significant evolution over the years. This review highlighted various technologies, such as BLE, UWB, Wi-Fi, ZigBee, and hybrid models, emphasizing their strengths and limitations. While these systems have seen success in specific domains, challenges like scalability, cost, signal interference, energy efficiency, and privacy concerns continue to exist. The introduction of hybrid localization systems has been a significant milestone, offering a combination of technologies to overcome the limitations of individual solutions. For example, integrating UWB and BLE has enabled systems to achieve both high precision and energy efficiency. In addition, machine learning models, such as LSTM networks, have demonstrated their potential in refining localization accuracy under dynamic conditions.
Future research should focus on enhancing the adaptability, precision, and reliability of localization systems in dynamic environments. Particularly, in sensitive sectors like healthcare and defense, it is critical to develop secure and scalable solutions. Innovations in energy harvesting and lightweight, battery-efficient modules could also help reduce costs and environmental impact, addressing the persistent issue of energy efficiency. One promising approach involves the use of artificial intelligence and machine learning algorithms. These tools have the potential to refine accuracy through predictive modeling and pattern recognition. Moreover, edge computing and real-time data processing could significantly minimize latency, enabling seamless operation in critical applications. Interdisciplinary collaborations between academia, industry, and government will play an essential role in standardizing protocols, improving interoperability, and driving the deployment of robust indoor localization solutions.
By addressing these research directions, the potential for smarter, safer, and more connected environments can be unlocked. This synthesis of past achievements and forward-looking perspectives aims to guide researchers and practitioners in overcoming existing barriers and maximizing the benefits of indoor localization technologies.
Author Contributions
Conceptualization, T.A. and I.K.; methodology, T.A.; software, T.A.; validation, I.K.; formal analysis, T.A.; investigation, T.A.; resources, T.A. and I.K.; data curation, T.A.; writing—original draft, T.A.; writing—review and editing, I.K.; visualization, T.A.; supervision, I.K.; project administration, I.K.; funding acquisition, I.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the Regional Innovation Strategy (RIS) through the National Research Foundation of Korea (NRF) funded by the Ministry of Education (MOE) under Grant 2021RIS-003.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Yapar, Ç.; Levie, R.; Kutyniok, G.; Caire, G. Real-time outdoor localization using radio maps: A deep learning approach. IEEE Trans. Wirel. Commun. 2023, 22, 9703–9717. [Google Scholar] [CrossRef]
- Wen, X.; Fang, S.; Fan, Y. Reconstruction of Radio Environment Map Based on Multi-Source Domain Adaptive of Graph Neural Network for Regression. Sensors 2024, 24, 2523. [Google Scholar] [CrossRef] [PubMed]
- Overmann, K.M.; Wu, D.T.; Xu, C.T.; Bindhu, S.S.; Barrick, L. Real-time locating systems to improve healthcare delivery: A systematic review. J. Am. Med. Inform. Assoc. 2021, 28, 1308–1317. [Google Scholar] [CrossRef]
- Wichmann, J. Indoor positioning systems in hospitals: A scoping review. Digit. Health 2022, 8, 20552076221081696. [Google Scholar] [CrossRef]
- Onifade, M.; Zvarivadza, T.; Adebisi, J.A. Towards application of positioning systems in the mining industry. Int. J. Min. Miner. Eng. 2024, 15, 15–48. [Google Scholar] [CrossRef]
- Pervez, F.; Qadir, J.; Khalil, M.; Yaqoob, T.; Ashraf, U.; Younis, S. Wireless technologies for emergency response: A comprehensive review and some guidelines. IEEE Access 2018, 6, 71814–71838. [Google Scholar] [CrossRef]
- Boersma, Y. Robust Localization and Navigation for Autonomous, Military Robots in GNSS-Denied Environments. Master’s Thesis, University of Twente, Enschede, The Netherlands, 2022. [Google Scholar]
- Phillips, J. Cognitive Requirements for Small Unit Leaders in Military Operations in Urban Terrain; US Army Research Institute for the Behavioral and Social Sciences: Fort Belvoir, VA, USA, 1998. [Google Scholar]
- Zong, Z.; Guan, Y. AI-Driven Intelligent Data Analytics and Predictive Analysis in Industry 4.0: Transforming Knowledge, Innovation, and Efficiency. J. Knowl. Econ. 2024, 1–40. [Google Scholar] [CrossRef]
- Di Pietra, V.; Dabove, P.; Piras, M. Loosely coupled GNSS and UWB with INS integration for indoor/outdoor pedestrian navigation. Sensors 2020, 20, 6292. [Google Scholar] [CrossRef]
- Bibbò, L.; Carotenuto, R.; Della Corte, F. An overview of indoor localization system for human activity recognition (HAR) in healthcare. Sensors 2022, 22, 8119. [Google Scholar] [CrossRef]
- Aziz, T.; Camana, M.R.; Garcia, C.E.; Hwang, T.; Koo, I. REM-Based Indoor Localization with an Extra-Trees Regressor. Electronics 2023, 12, 4350. [Google Scholar] [CrossRef]
- Aziz, T.; Insoo, K. Enhancing Indoor Localization Accuracy through Multiple Access Point Deployment. Electronics 2024, 13, 3307. [Google Scholar] [CrossRef]
- Bradley, C.; El-Tawab, S.; Heydari, M.H. Security analysis of an IoT system used for indoor localization in healthcare facilities. In Proceedings of the 2018 Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 27 April 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 147–152. [Google Scholar]
- Fu, B.; Damer, N.; Kirchbuchner, F.; Kuijper, A. Sensing technology for human activity recognition: A comprehensive survey. IEEE Access 2020, 8, 83791–83820. [Google Scholar] [CrossRef]
- Demrozi, F.; Pravadelli, G.; Bihorac, A.; Rashidi, P. Human activity recognition using inertial, physiological and environmental sensors: A comprehensive survey. IEEE Access 2020, 8, 210816–210836. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, Q.H.; Johnson, P.; Nguyen, T.T.; Randles, M. A novel architecture using iBeacons for localization and tracking of people within healthcare environment. In Proceedings of the 2019 Global IoT Summit (GIoTS), Aarhus, Denmark, 17–21 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Ullah, I.; Adhikari, D.; Khan, H.; Anwar, M.S.; Ahmad, S.; Bai, X. Mobile robot localization: Current challenges and future prospective. Comput. Sci. Rev. 2024, 53, 100651. [Google Scholar] [CrossRef]
- Hapsari, G.I.; Munadi, R.; Erfianto, B.; Irawati, I.D. Future Research and Trends in Ultra-Wideband Indoor Tag Localization. IEEE Access 2024, early access. [Google Scholar]
- Nasr, M.; Islam, M.M.; Shehata, S.; Karray, F.; Quintana, Y. Smart healthcare in the age of AI: Recent advances, challenges, and future prospects. IEEE Access 2021, 9, 145248–145270. [Google Scholar] [CrossRef]
- Munoz, J.A.R. Mav Localization in GPS-Denied Environments and Synthetic Data Collection in Challenging Simulated Conditions. Ph.D. Thesis, The University of Texas at El Paso, El Paso, TX, USA, 2024. [Google Scholar]
- Amanatiadis, A. A multisensor indoor localization system for biped robots operating in industrial environments. IEEE Trans. Ind. Electron. 2016, 63, 7597–7606. [Google Scholar] [CrossRef]
- El Masri, I.; Lescop, B.; Talbot, P.; Vien, G.N.; Becker, J.; Thierry, D.; Rioual, S. Development of a RFID sensitive tag dedicated to the monitoring of the environmental corrosiveness for indoor applications. Sens. Actuators B Chem. 2020, 322, 128602. [Google Scholar] [CrossRef]
- Kianfar, A.E. Ultra-Wideband Based Positioning Systems for Harsh Mining Environment. Ph.D. Thesis, RWTH Aachen University, Aachen, Germany, 2021. [Google Scholar]
- ukasik, S.; Szott, S.; Leszczuk, M. Multimodal Image-Based Indoor Localization with Machine Learning—A Systematic Review. Sensors 2024, 24, 6051. [Google Scholar] [CrossRef]
- Karaagac, A.; Haxhibeqiri, J.; Ridolfi, M.; Joseph, W.; Moerman, I.; Hoebeke, J. Evaluation of accurate indoor localization systems in industrial environments. In Proceedings of the 2017 22nd IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Limassol, Cyprus, 12–15 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–8. [Google Scholar]
- Farahsari, P.S.; Farahzadi, A.; Rezazadeh, J.; Bagheri, A. A survey on indoor positioning systems for IoT-based applications. IEEE Internet Things J. 2022, 9, 7680–7699. [Google Scholar] [CrossRef]
- Evjen, T.Å.; Hosseini Raviz, S.R.; Petersen, S.A.; Krogstie, J. Smart facility management: Future healthcare organization through indoor positioning systems in the light of enterprise BIM. Smart Cities 2020, 3, 793–805. [Google Scholar] [CrossRef]
- Shi, H.; Zhao, H.; Liu, Y.; Gao, W.; Dou, S.C. Systematic analysis of a military wearable device based on a multi-level fusion framework: Research directions. Sensors 2019, 19, 2651. [Google Scholar] [CrossRef] [PubMed]
- Rantakokko, J.; Rydell, J.; Strömbäck, P.; Händel, P.; Callmer, J.; Törnqvist, D.; Gustafsson, F.; Jobs, M.; Grudén, M. Accurate and reliable soldier and first responder indoor positioning: Multisensor systems and cooperative localization. IEEE Wirel. Commun. 2011, 18, 10–18. [Google Scholar] [CrossRef]
- Sisinni, E.; Saifullah, A.; Han, S.; Jennehag, U.; Gidlund, M. Industrial internet of things: Challenges, opportunities, and directions. IEEE Trans. Ind. Inform. 2018, 14, 4724–4734. [Google Scholar] [CrossRef]
- Singh, O.; Vinoth, R.; Singh, A.; Singh, N. Navigating Security Threats and Solutions using AI in Wireless Sensor Networks. Int. J. Commun. Netw. Inf. Secur. 2024, 16, 411–427. [Google Scholar]
- Rane, N.; Choudhary, S.; Rane, J. Artificial Intelligence (AI) and Internet of Things (IoT)-based sensors for monitoring and controlling in architecture, engineering, and construction: Applications, challenges, and opportunities. SSRN Electron. J. 2023. [Google Scholar] [CrossRef]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent advances in indoor localization: A survey on theoretical approaches and applications. IEEE Commun. Surv. Tutor. 2016, 19, 1327–1346. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef]
- Vey, Q.; Spies, F.; Pestourie, B.; Genon-Catalot, D.; Van Den Bossche, A.; Val, T.; Dalce, R.; Schrive, J. POUCET: A Multi-technology indoor positioning solution for firefighters and soldiers. In Proceedings of the 2021 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Lloret de Mar, Spain, 29 November–2 December 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–8. [Google Scholar]
- Shahian Jahromi, B.; Tulabandhula, T.; Cetin, S. Real-time hybrid multi-sensor fusion framework for perception in autonomous vehicles. Sensors 2019, 19, 4357. [Google Scholar] [CrossRef] [PubMed]
- Skiba, R. Urban Warfare: Emergence, Evolution, Strategies and Mastery of the Modern Conflict Landscape; After Midnight Publishing: London, UK, 2024. [Google Scholar]
- Sonny, A.; Kumar, A.; Cenkeramaddi, L.R. A Survey of Application of Machine Learning in Wireless Indoor Positioning Systems. arXiv 2024, arXiv:2403.04333. [Google Scholar]
- Danaher, L.T.; Wood, E.; Frazier, T. Rescue coordination common operating picture: Enhancement through satellite technology. J. Emerg. Manag. 2022, 20, 73–90. [Google Scholar] [CrossRef] [PubMed]
- Alsadie, D. Artificial Intelligence Techniques for Securing Fog Computing Environments: Trends, Challenges, and Future Directions. IEEE Access 2024, 12, 151598–151648. [Google Scholar] [CrossRef]
- Closas, P.; Ortega, L.; Lesouple, J.; Djurić, P.M. Emerging trends in signal processing and machine learning for positioning, navigation and timing information: Special issue editorial. EURASIP J. Adv. Signal Process. 2024, 2024, 84. [Google Scholar] [CrossRef]
- Kumar, M.G.; Roy, K.S. Zigbee based indoor campus inventory tracking using RFID module. Int. J. Eng. Res. Appl. 2014, 4, 132–136. [Google Scholar]
- Bazo, R.; da Costa, C.A.; Seewald, L.A.; da Silveira, L.G.; Antunes, R.S.; Righi, R.d.R.; Rodrigues, V.F. A survey about real-time location systems in healthcare environments. J. Med. Syst. 2021, 45, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Calderoni, L.; Ferrara, M.; Franco, A.; Maio, D. Indoor localization in a hospital environment using random forest classifiers. Expert Syst. Appl. 2015, 42, 125–134. [Google Scholar] [CrossRef]
- Wyffels, J.; De Brabanter, J.; Crombez, P.; Verhoeve, P.; Nauwelaers, B.; De Strycker, L. Distributed, signal strength-based indoor localization algorithm for use in healthcare environments. IEEE J. Biomed. Health Inform. 2014, 18, 1887–1893. [Google Scholar] [CrossRef] [PubMed]
- Chakole, S.; Jibhkate, R.R.; Choudhari, A.V.; Gawali, S.R.; Tule, P.R. A healthcare monitoring system using WiFi module. Int. Res. J. Eng. Technol 2017, 4, 1413–1417. [Google Scholar]
- Gholamhosseini, L.; Sadoughi, F.; Safaei, A. Hospital real-time location system (A practical approach in healthcare): A narrative review article. Iran. J. Public Health 2019, 48, 593. [Google Scholar] [CrossRef]
- Laoudias, C.; Moreira, A.; Kim, S.; Lee, S.; Wirola, L.; Fischione, C. A survey of enabling technologies for network localization, tracking, and navigation. IEEE Commun. Surv. Tutor. 2018, 20, 3607–3644. [Google Scholar] [CrossRef]
- Santoso, F.; Redmond, S.J. Indoor location-aware medical systems for smart homecare and telehealth monitoring: State-of-the-art. Physiol. Meas. 2015, 36, R53. [Google Scholar] [CrossRef]
- Munadhil, Z.; Gharghan, S.K.; Mutlag, A.H.; Al-Naji, A.; Chahl, J. Neural network-based Alzheimer’s patient localization for wireless sensor network in an indoor environment. IEEE Access 2020, 8, 150527–150538. [Google Scholar] [CrossRef]
- Amoran, A.E.; Oluwole, A.S.; Fagorola, E.O.; Diarah, R. Home automated system using Bluetooth and an android application. Sci. Afr. 2021, 11, e00711. [Google Scholar] [CrossRef]
- Bouhassoune, I.; Chaibi, H.; Chehri, A.; Saadane, R. A Review of RFID-based Internet of Things in the Healthcare Area, the New Horizon of RFID. Procedia Comput. Sci. 2022, 207, 4151–4160. [Google Scholar] [CrossRef]
- IEEE 802.15.4-2020; IEEE Standard for Low-Rate Wireless Networks. IEEE Standards Association: Piscataway, NJ, USA, 2020.
- Kim, D.H.; Song, J.Y.; Lee, S.H.; Cha, S.K. Development and evaluation of Zigbee node module for USN. Int. J. Precis. Eng. Manuf. 2009, 10, 53–57. [Google Scholar] [CrossRef]
- Ratiu, O.; Rusu, A.; Pastrav, A.; Palade, T.; Puschita, E. Implementation of an UWB-based module designed for wireless intra-spacecraft communications. In Proceedings of the 2016 IEEE International Conference on Wireless for Space and Extreme Environments (WiSEE), Aachen, Germany, 26–28 September 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 146–151. [Google Scholar]
- Niu, Z.; Yang, H.; Zhou, L.; Taha, M.F.; He, Y.; Qiu, Z. Deep learning-based ranging error mitigation method for UWB localization system in greenhouse. Comput. Electron. Agric. 2023, 205, 107573. [Google Scholar] [CrossRef]
- Mahdi, A.A.; Chalechale, A.; AbdelRaouf, A. A hybrid indoor positioning model for critical situations based on localization technologies. Mob. Inf. Syst. 2022, 2022, 8033380. [Google Scholar] [CrossRef]
- Montaser, A.; Moselhi, O. RFID indoor location identification for construction projects. Autom. Constr. 2014, 39, 167–179. [Google Scholar] [CrossRef]
- Szyc, K.; Nikodem, M.; Zdunek, M. Bluetooth low energy indoor localization for large industrial areas and limited infrastructure. Ad Hoc Netw. 2023, 139, 103024. [Google Scholar] [CrossRef]
- Cheng, V.C.; Hao, L.; Ng, J.K.; Cheung, W.K. Fast setup and robust wifi localization for the exhibition industry. In Proceedings of the 2018 IEEE 32nd International Conference on Advanced Information Networking and Applications (AINA), Krakow, Poland, 16–18 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 472–479. [Google Scholar]
- Luoh, L. ZigBee-based intelligent indoor positioning system soft computing. Soft Comput. 2014, 18, 443–456. [Google Scholar] [CrossRef]
- Li, F.; Liu, M.; Zhang, Y.; Shen, W. A two-level WiFi fingerprint-based indoor localization method for dangerous area monitoring. Sensors 2019, 19, 4243. [Google Scholar] [CrossRef] [PubMed]
- Ariante, G.; Ponte, S.; Del Core, G. Bluetooth low energy based technology for small UAS indoor positioning. In Proceedings of the 2022 IEEE 9th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Pisa, Italy, 27–29 June 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 113–118. [Google Scholar]
- Ou, C.W.; Chao, C.J.; Chang, F.S.; Wang, S.M.; Liu, G.X.; Wu, M.R.; Cho, K.Y.; Hwang, L.T.; Huan, Y.Y. A ZigBee position technique for indoor localization based on proximity learning. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 875–880. [Google Scholar]
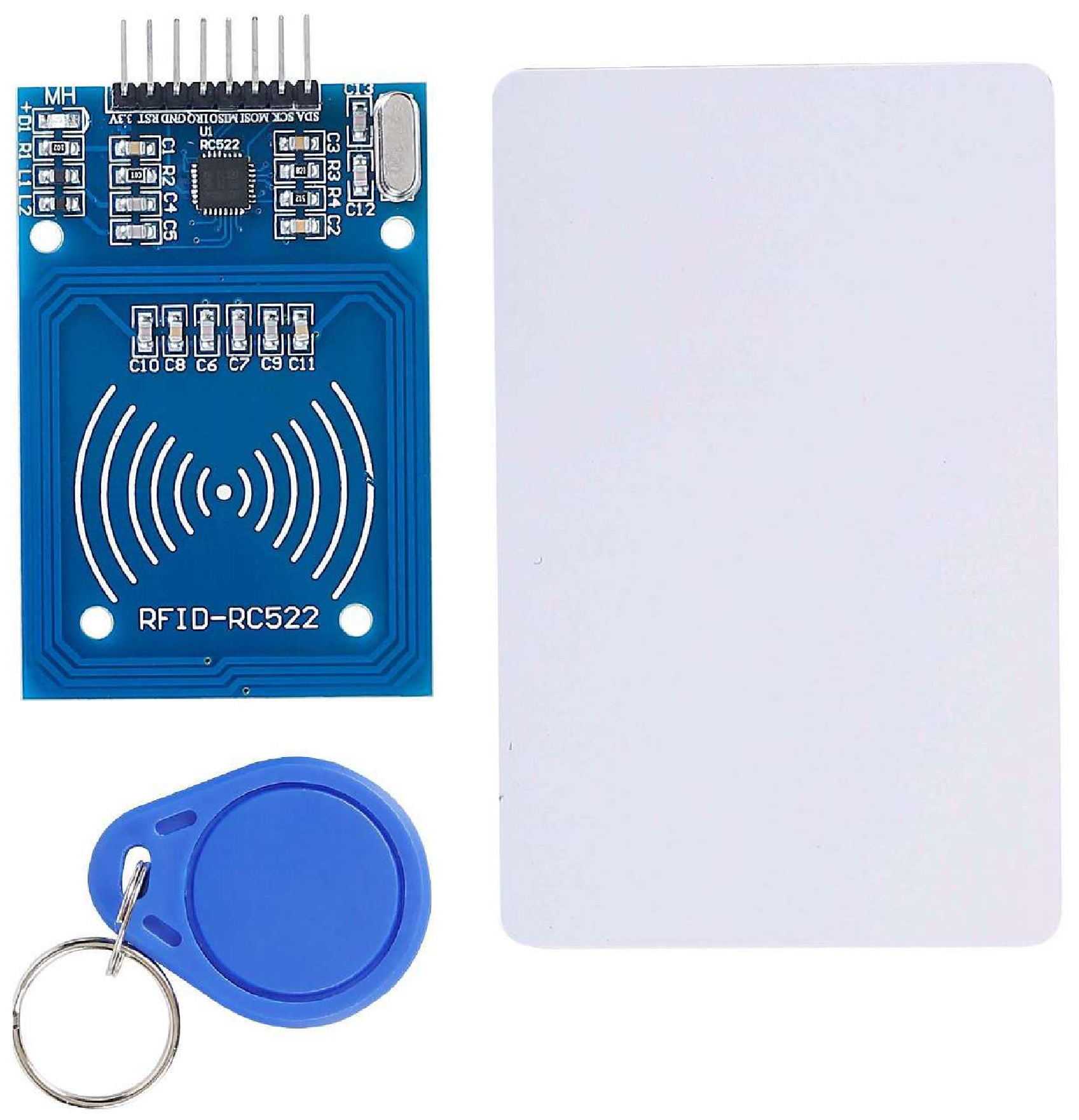

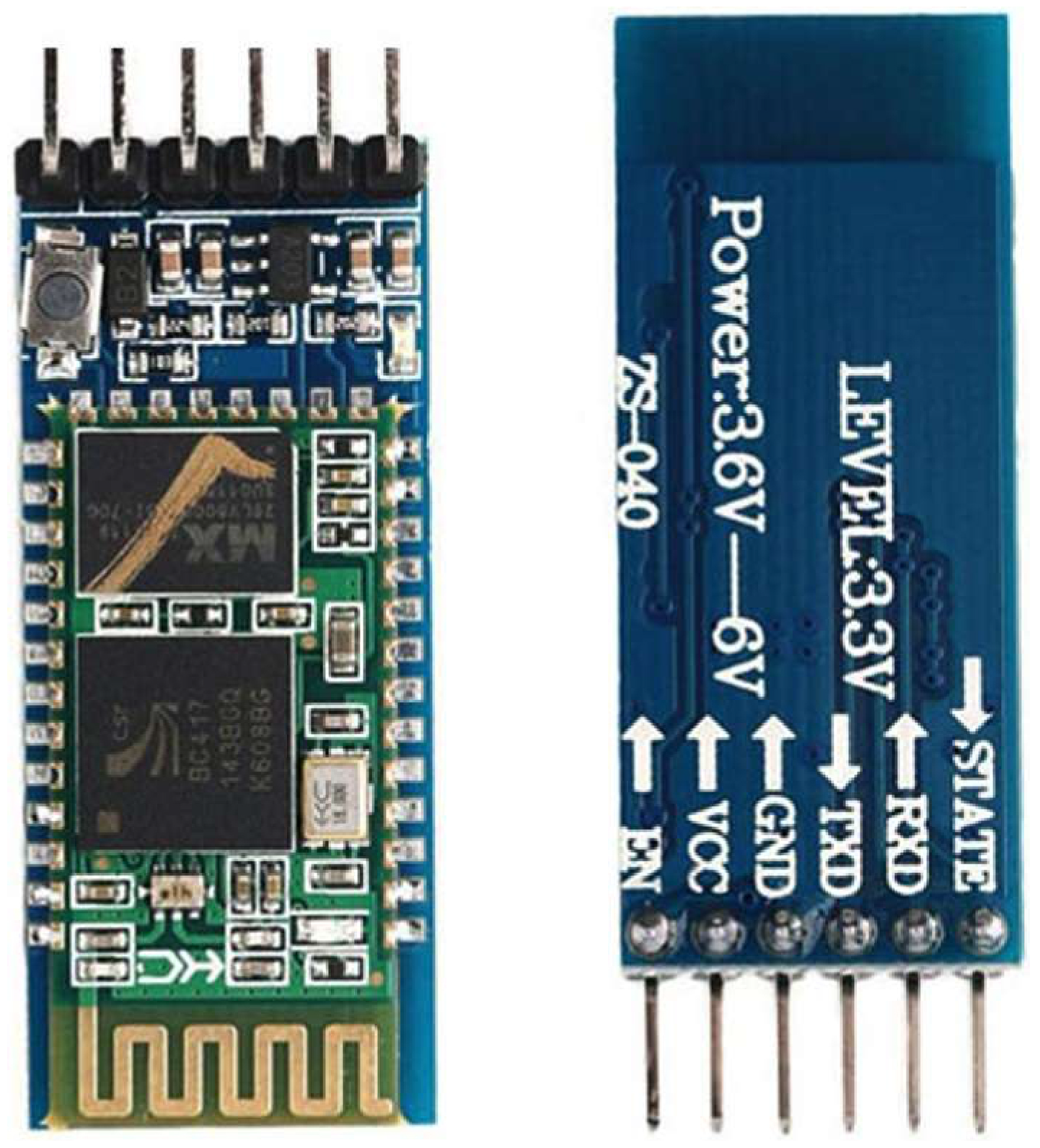
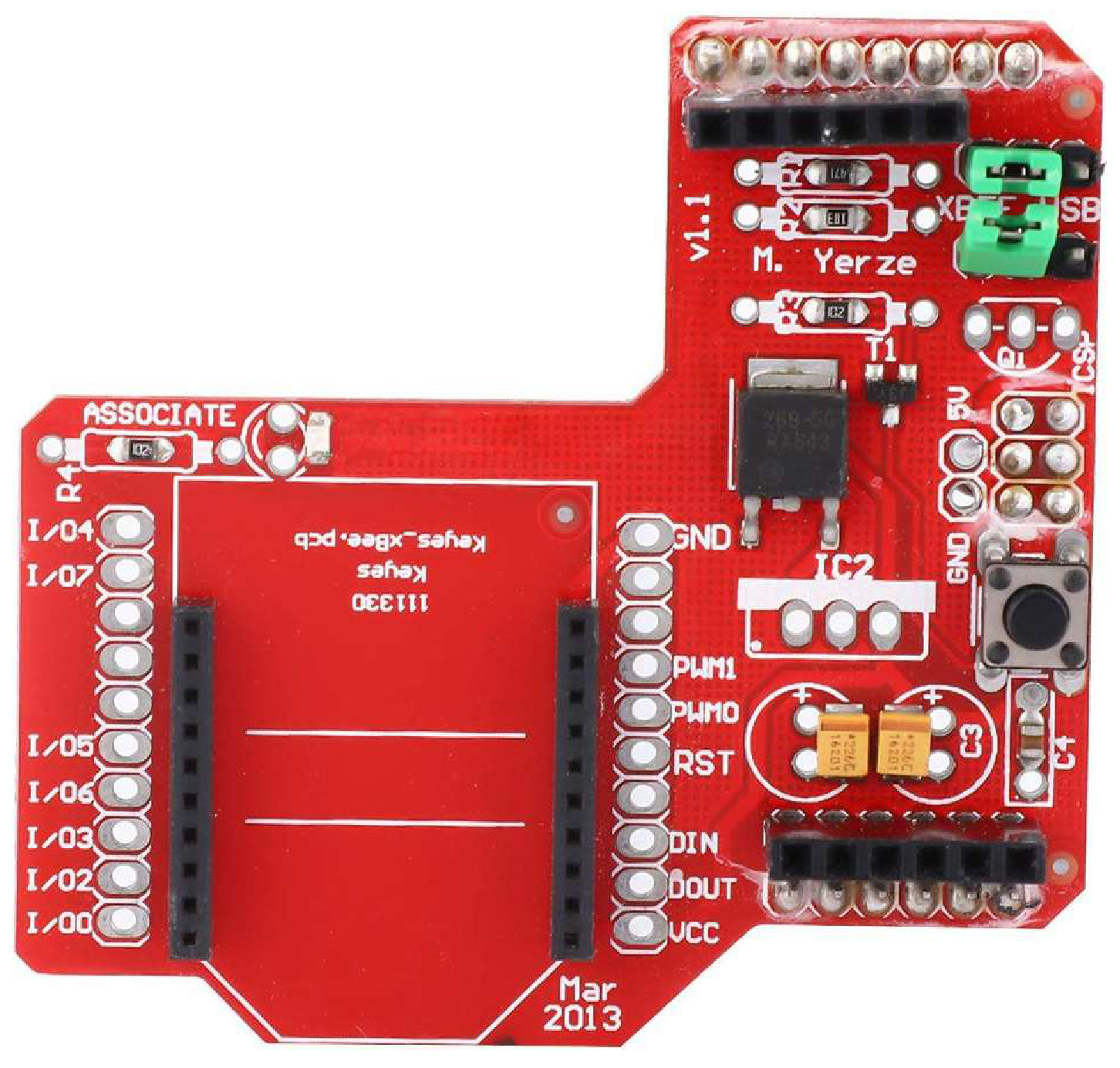
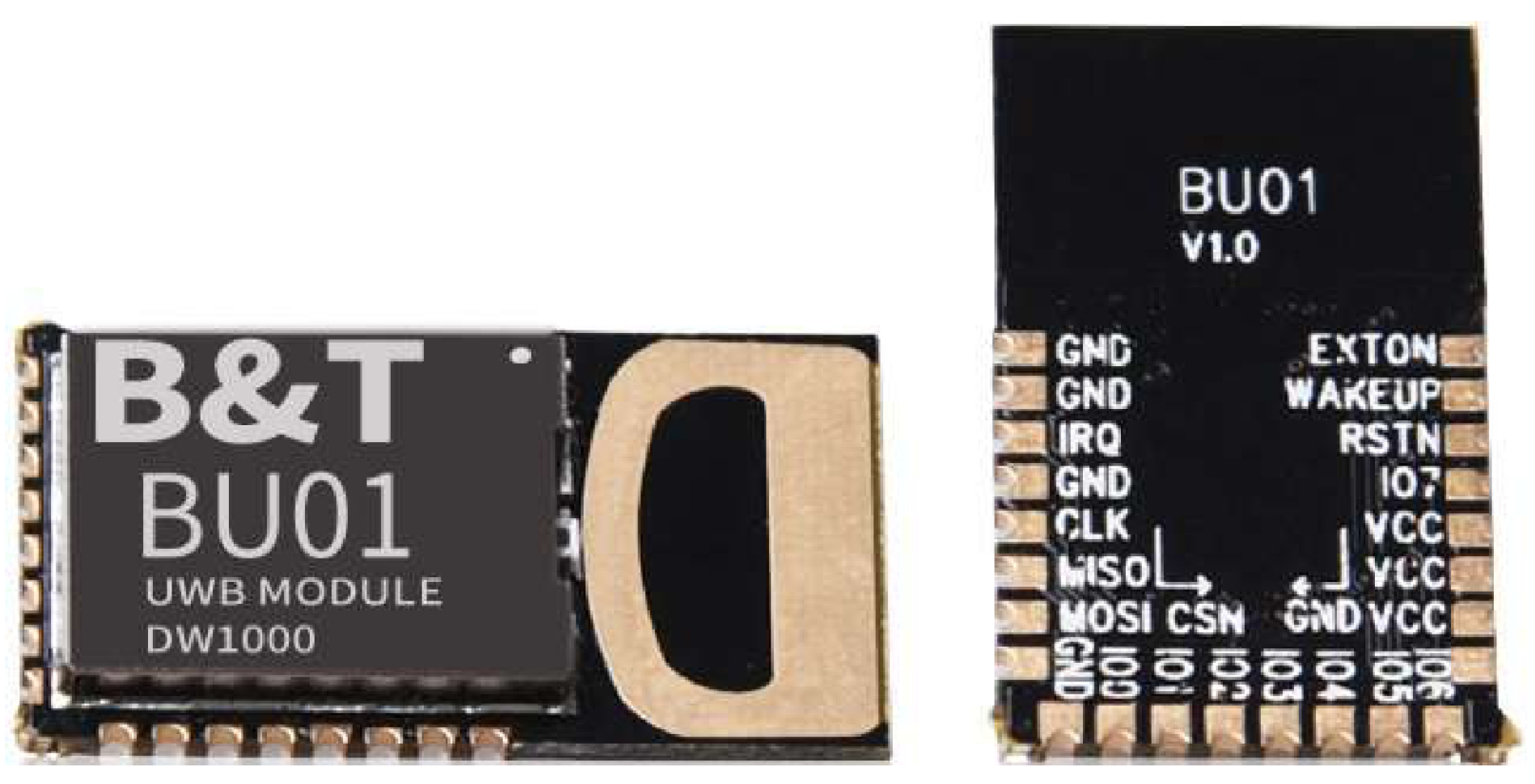
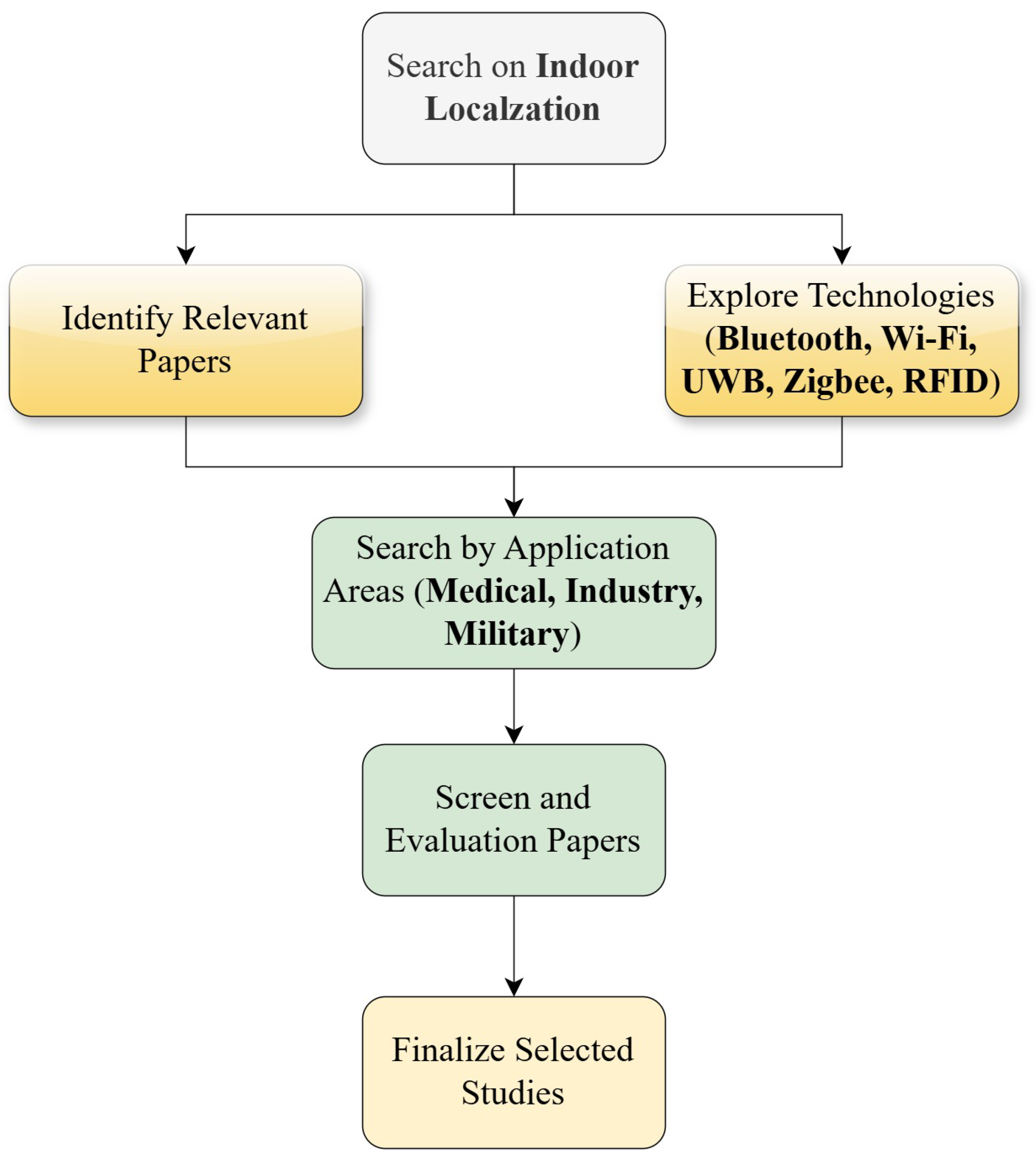
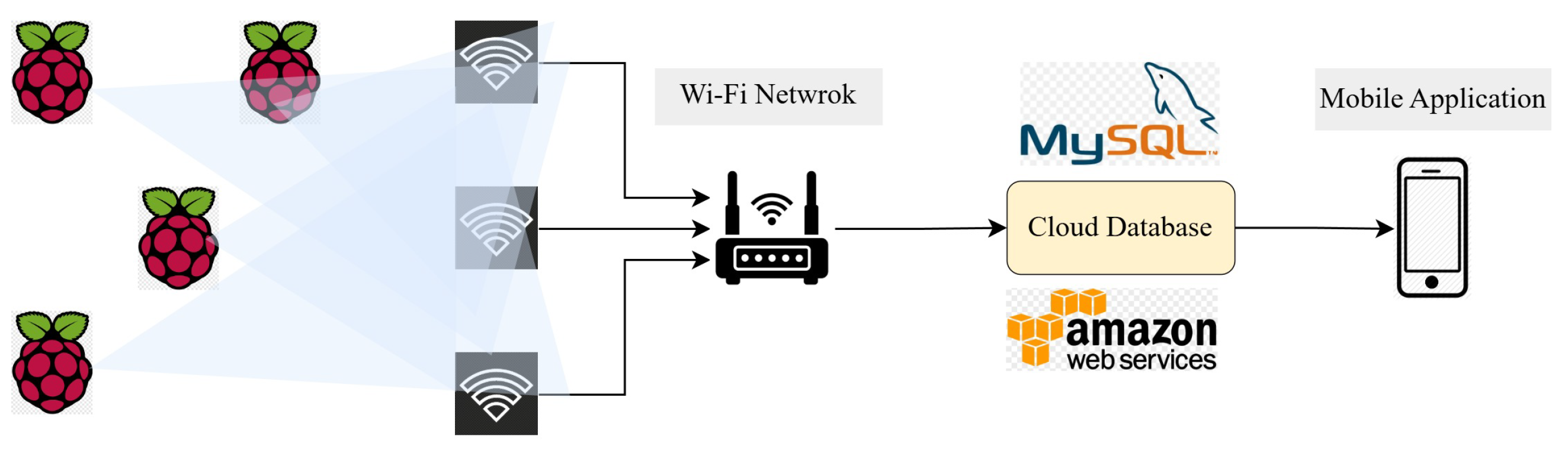
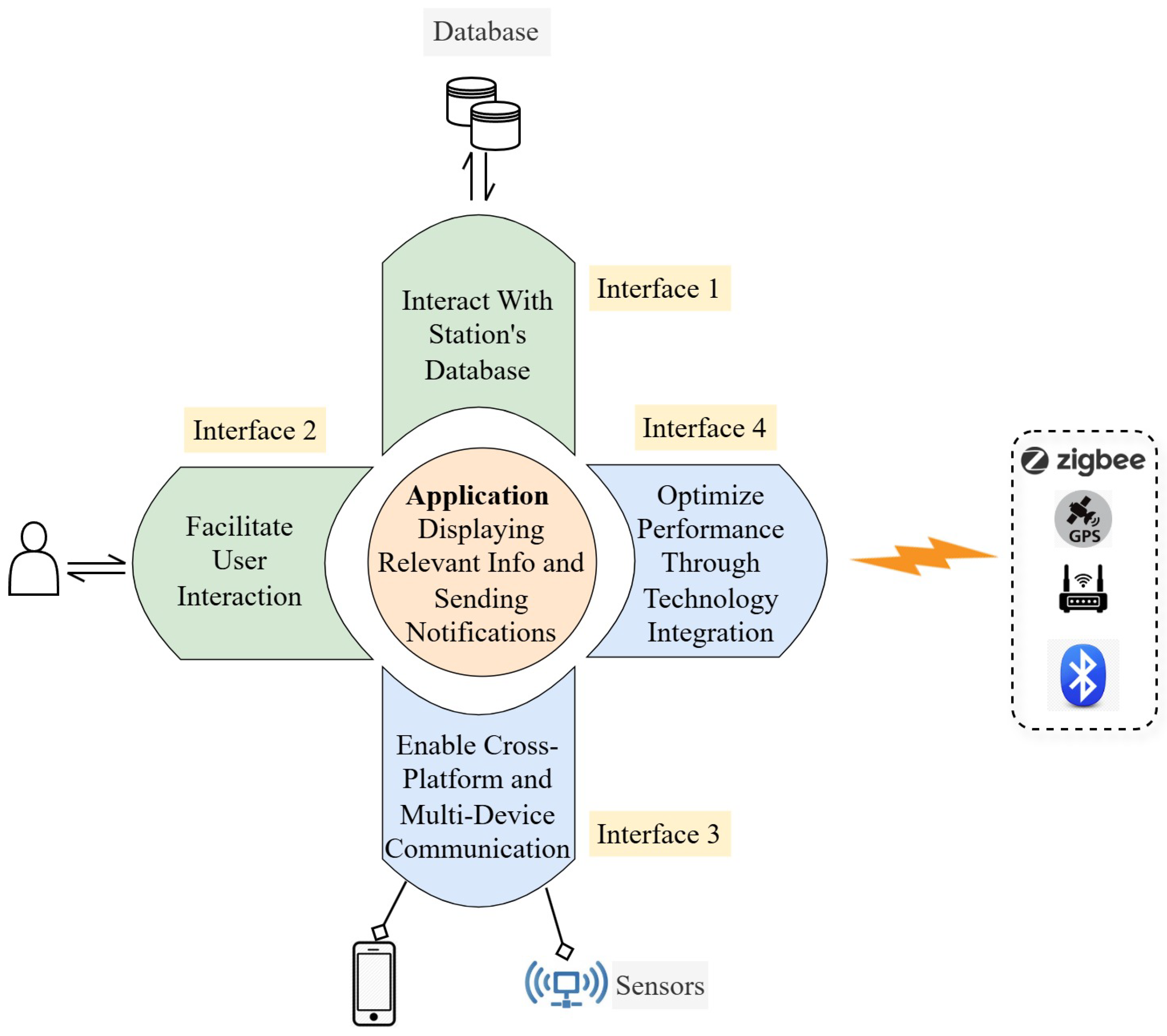
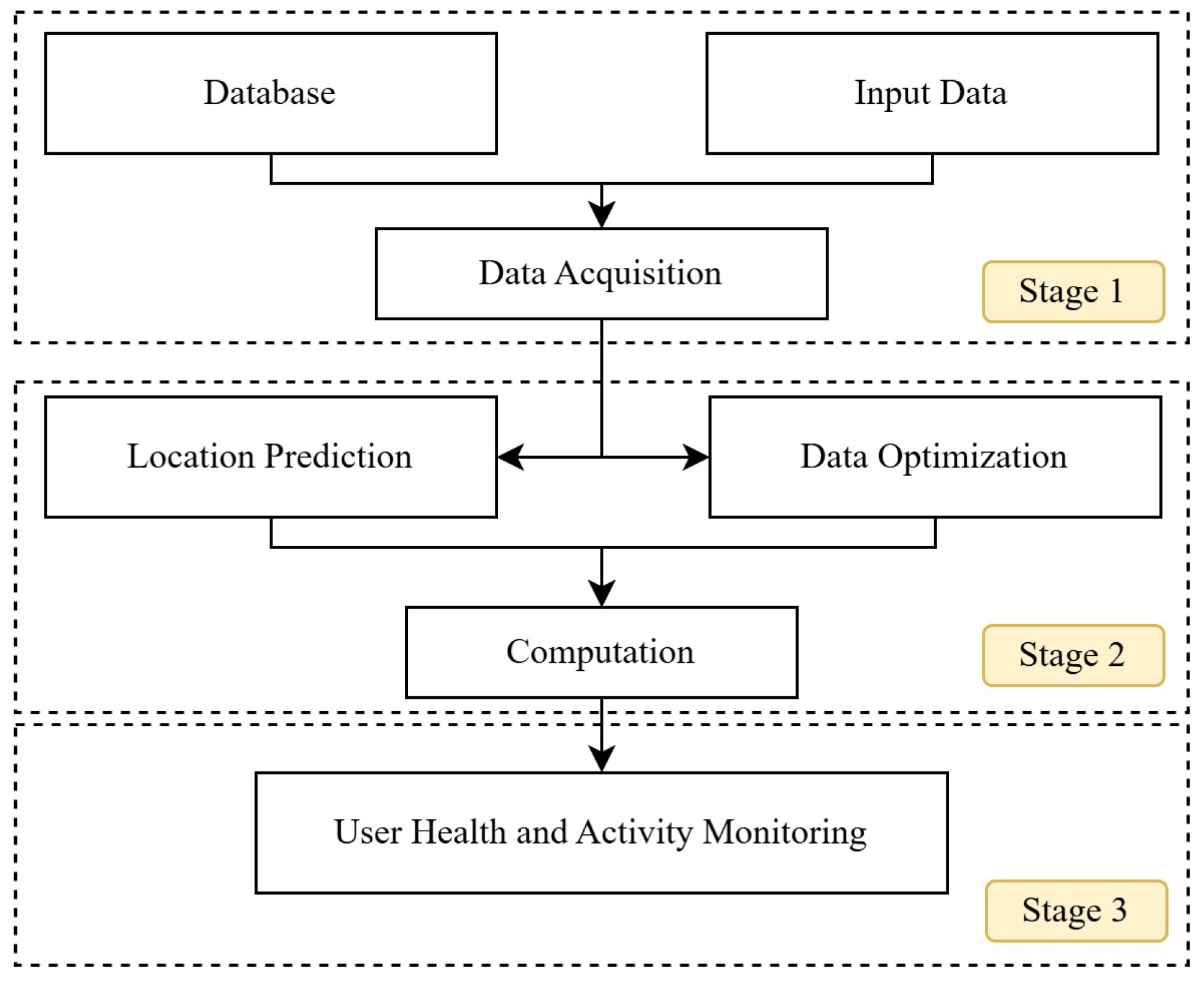
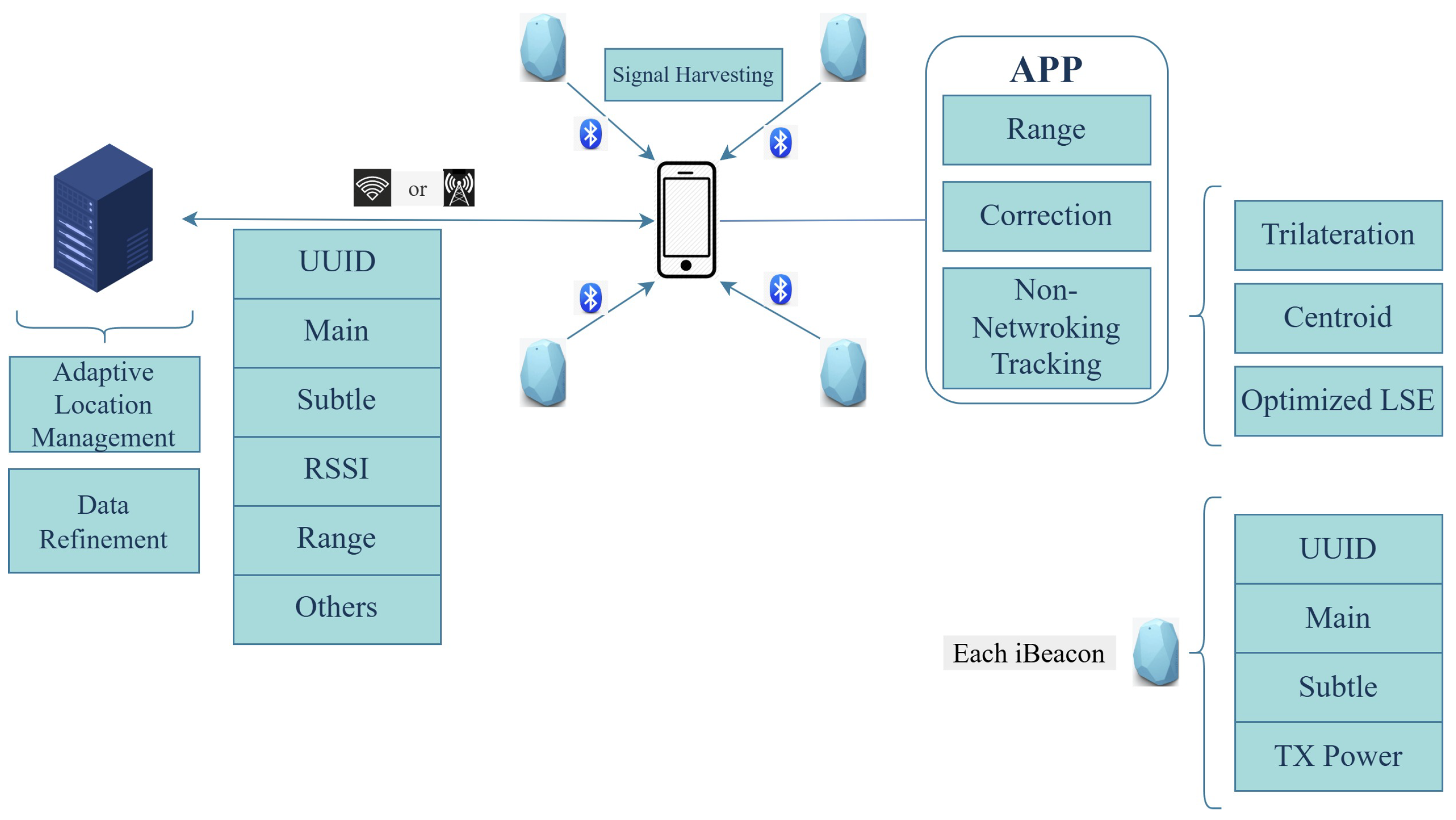
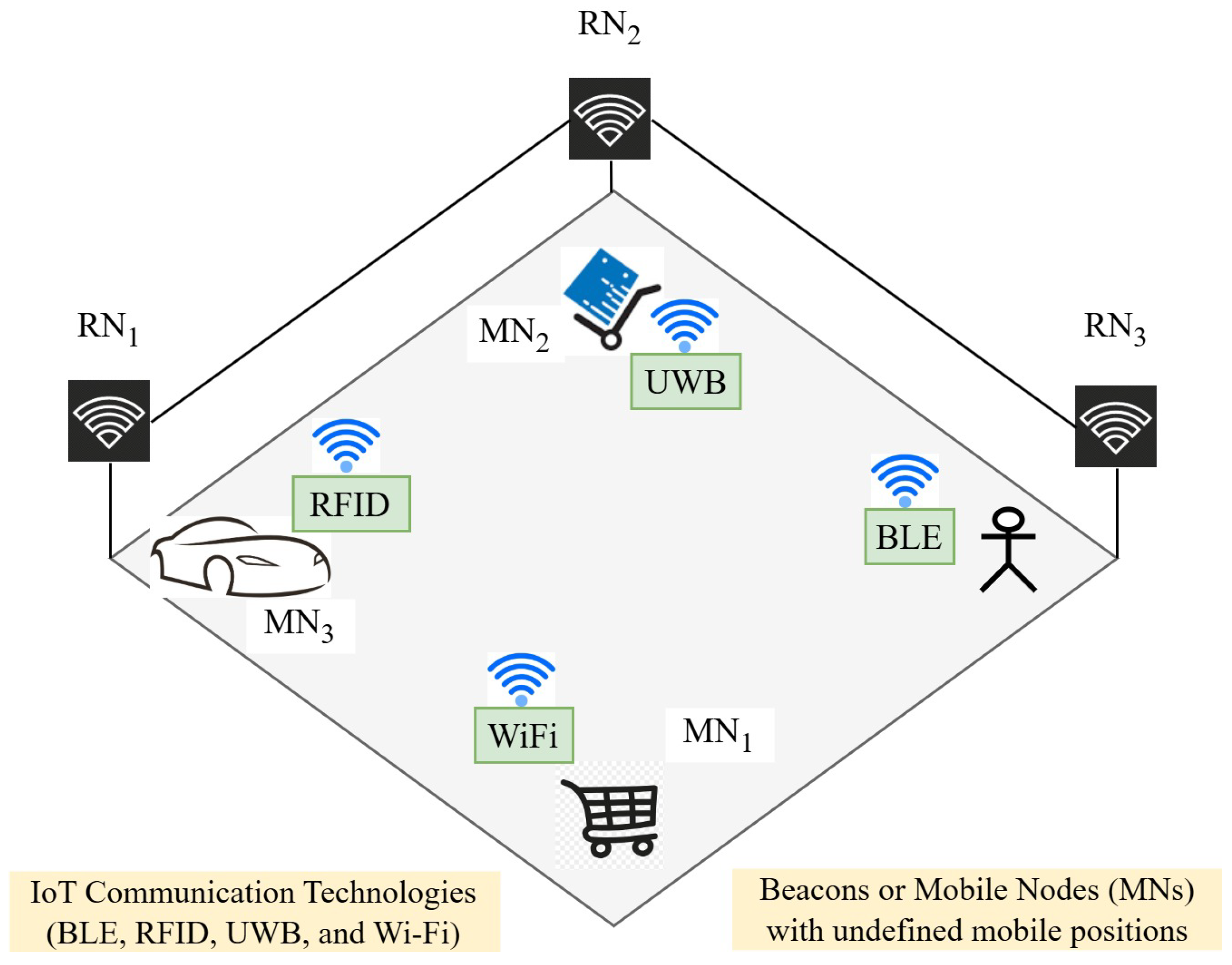
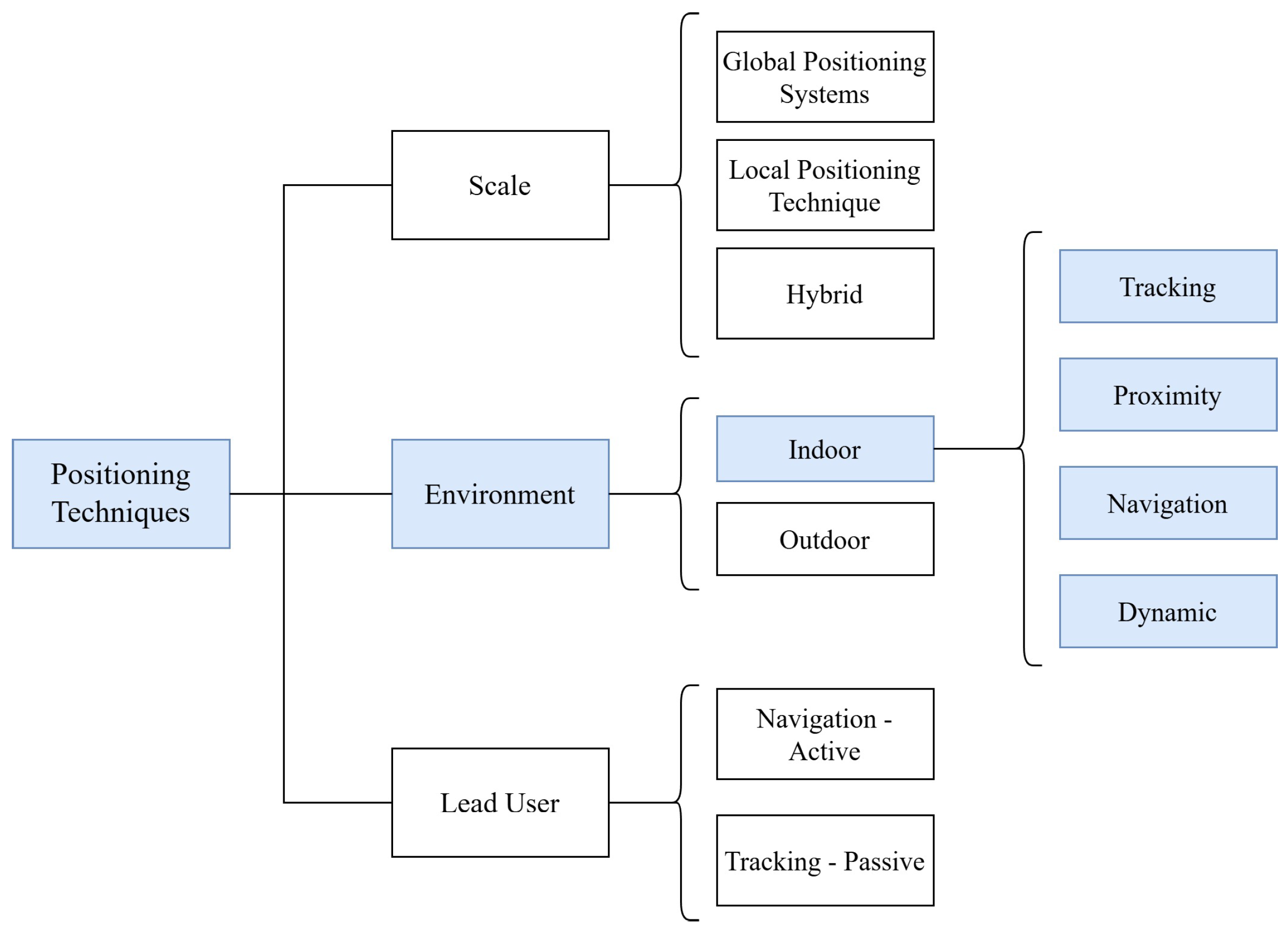
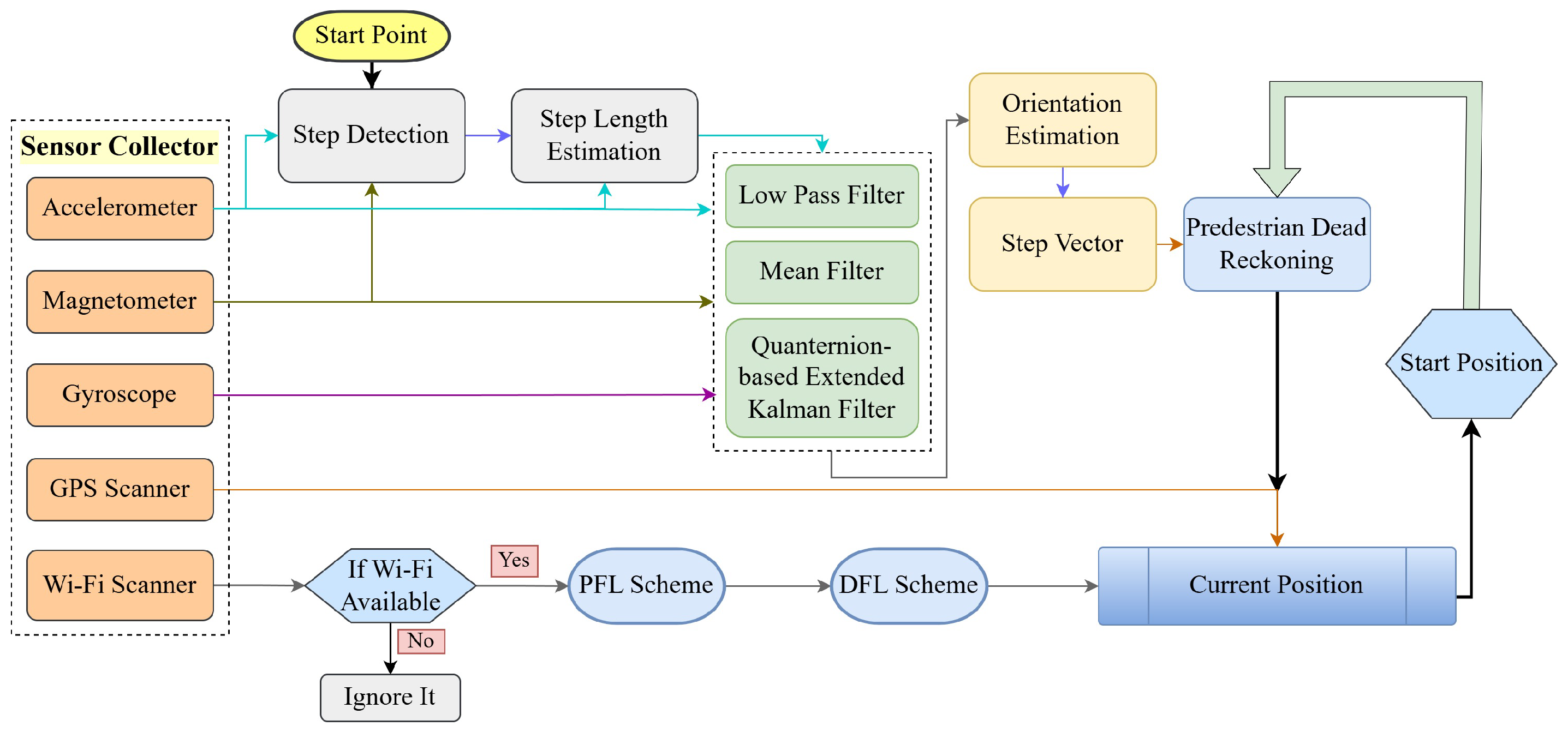
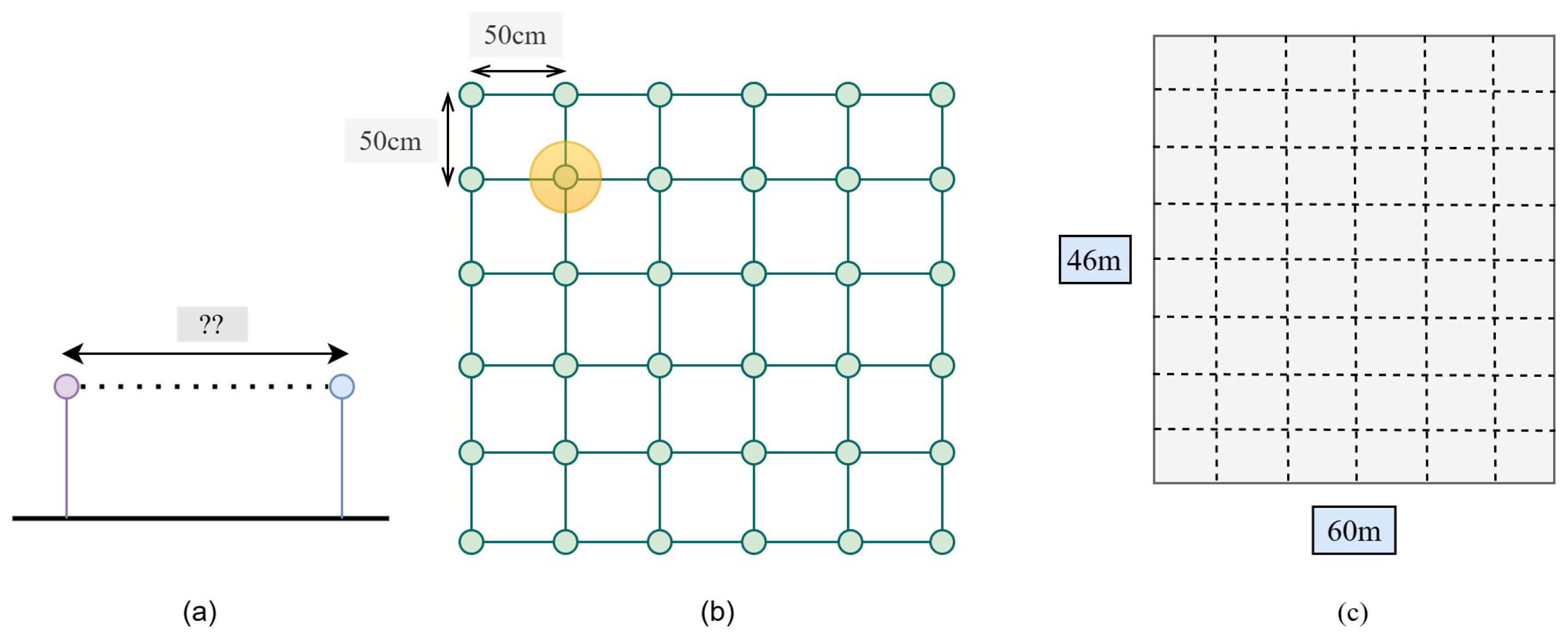
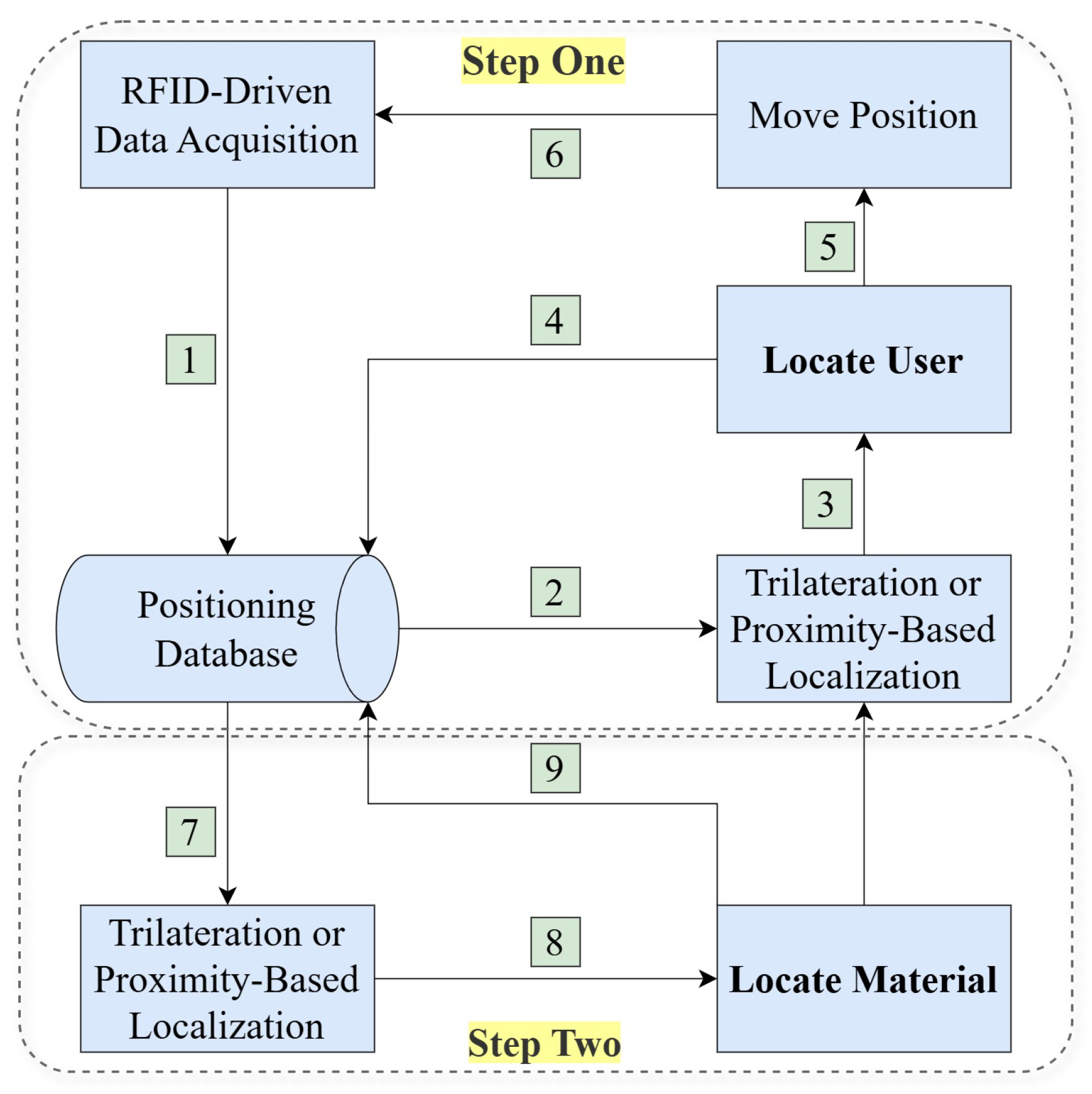
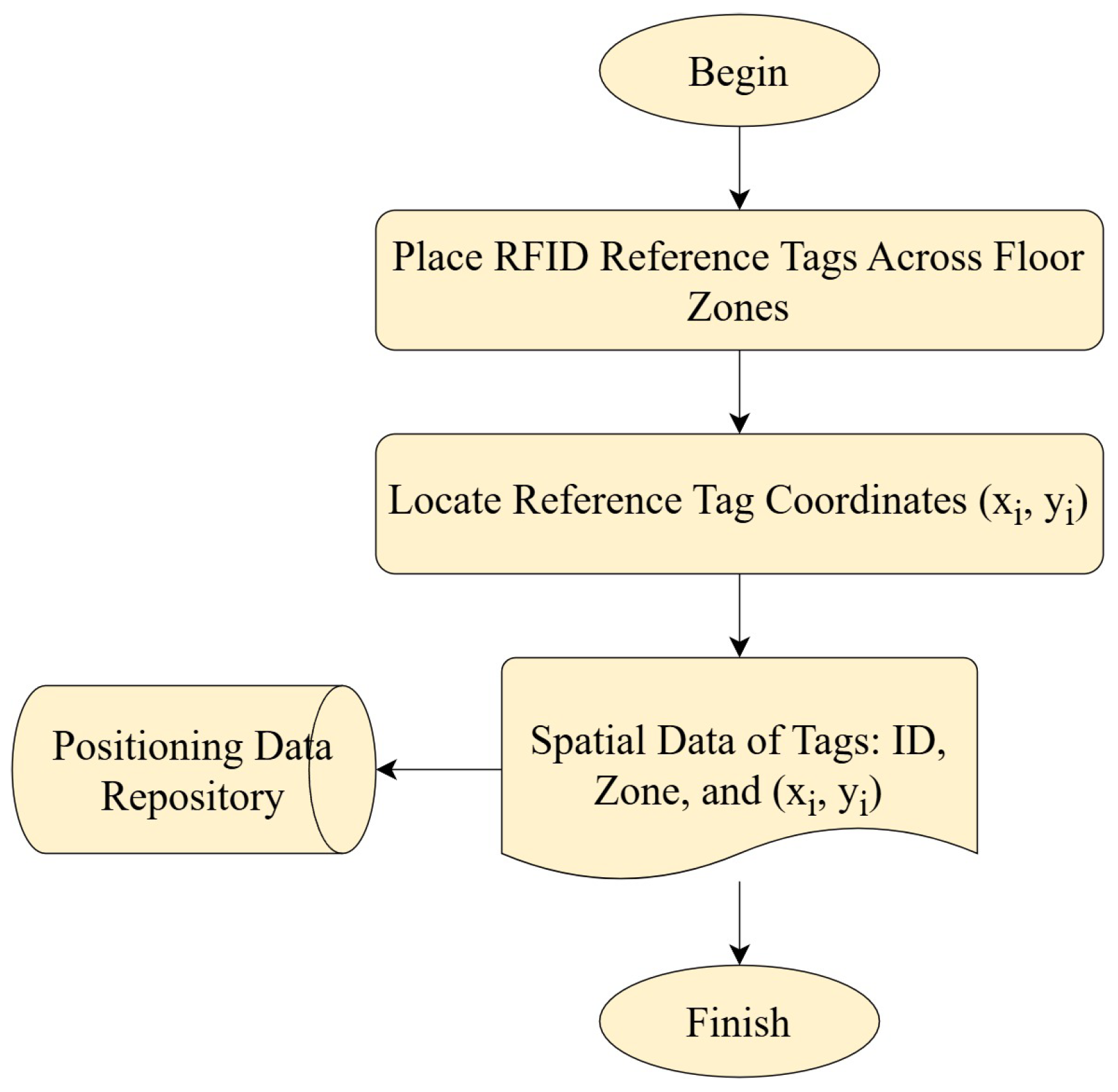
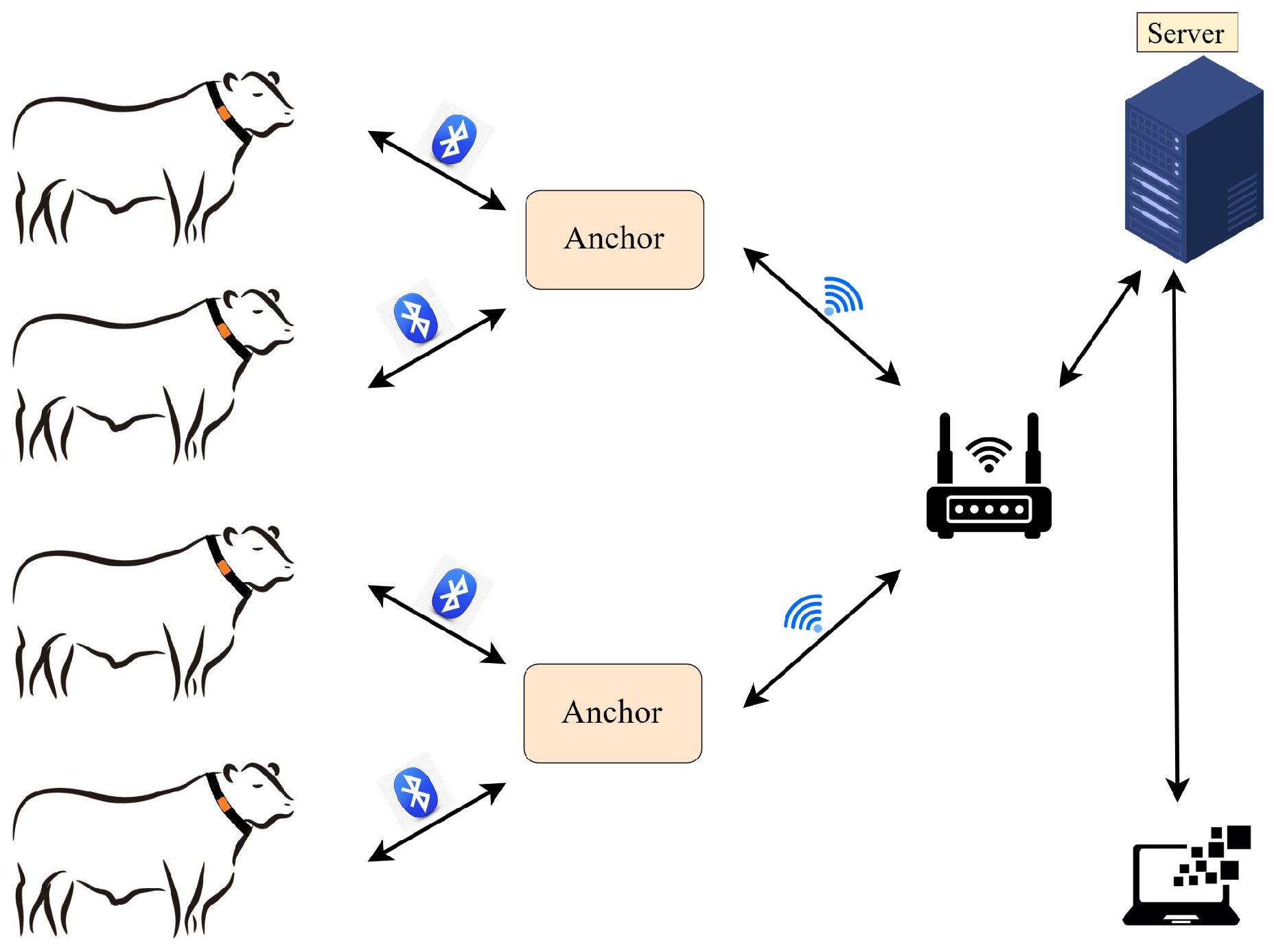
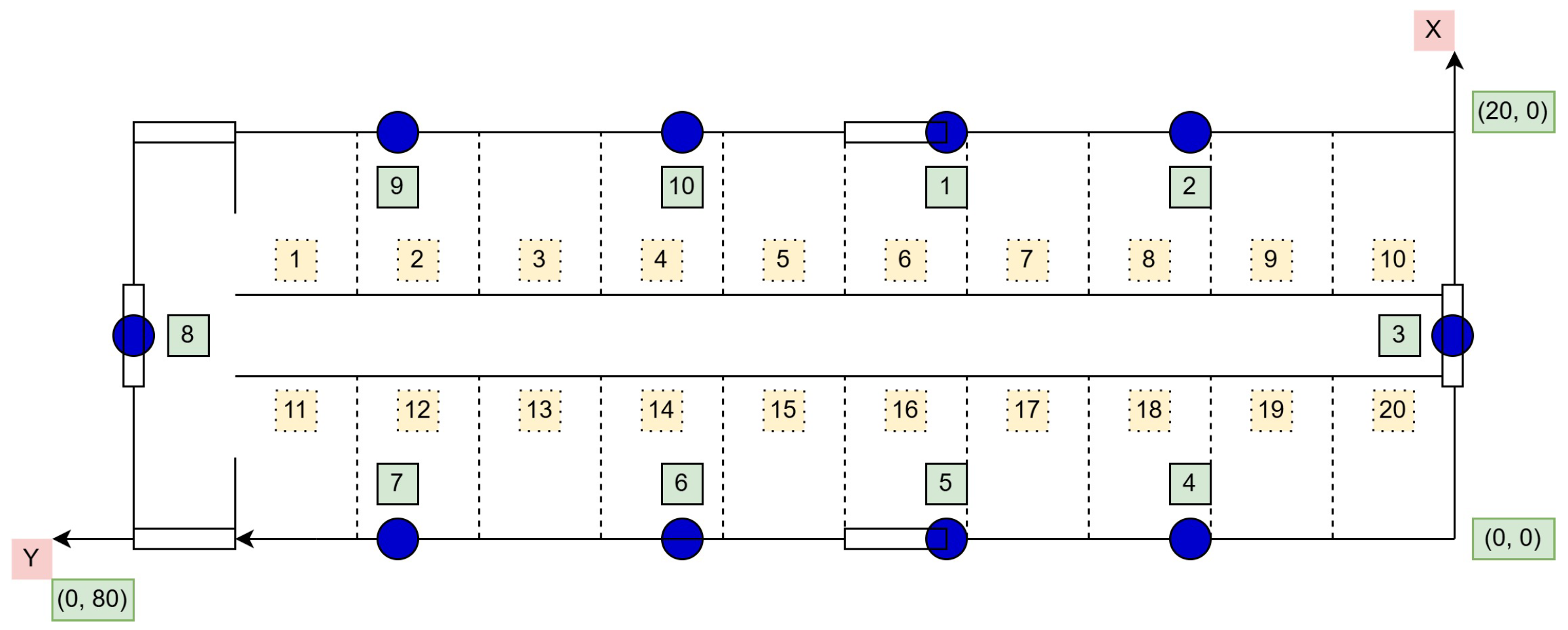
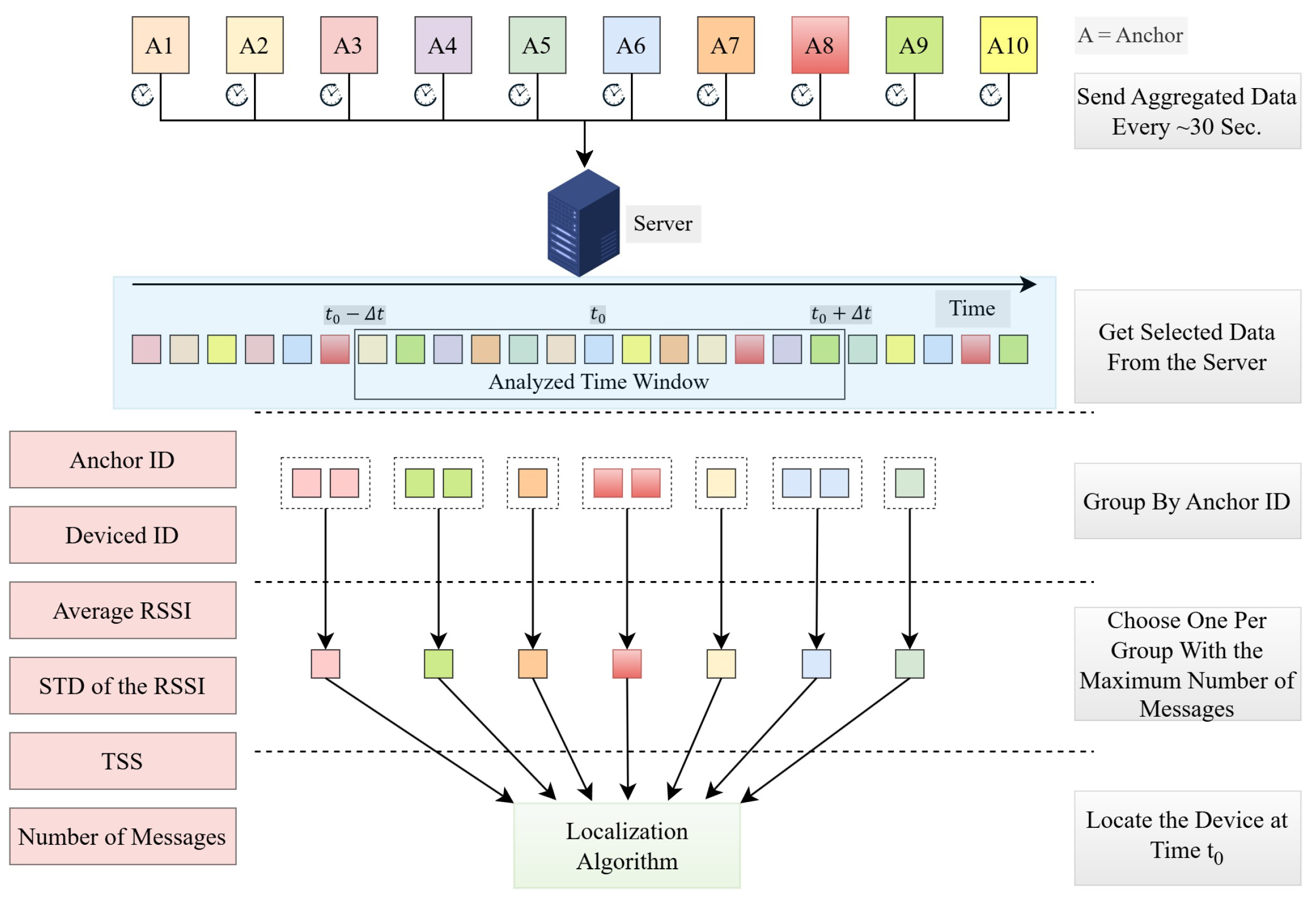
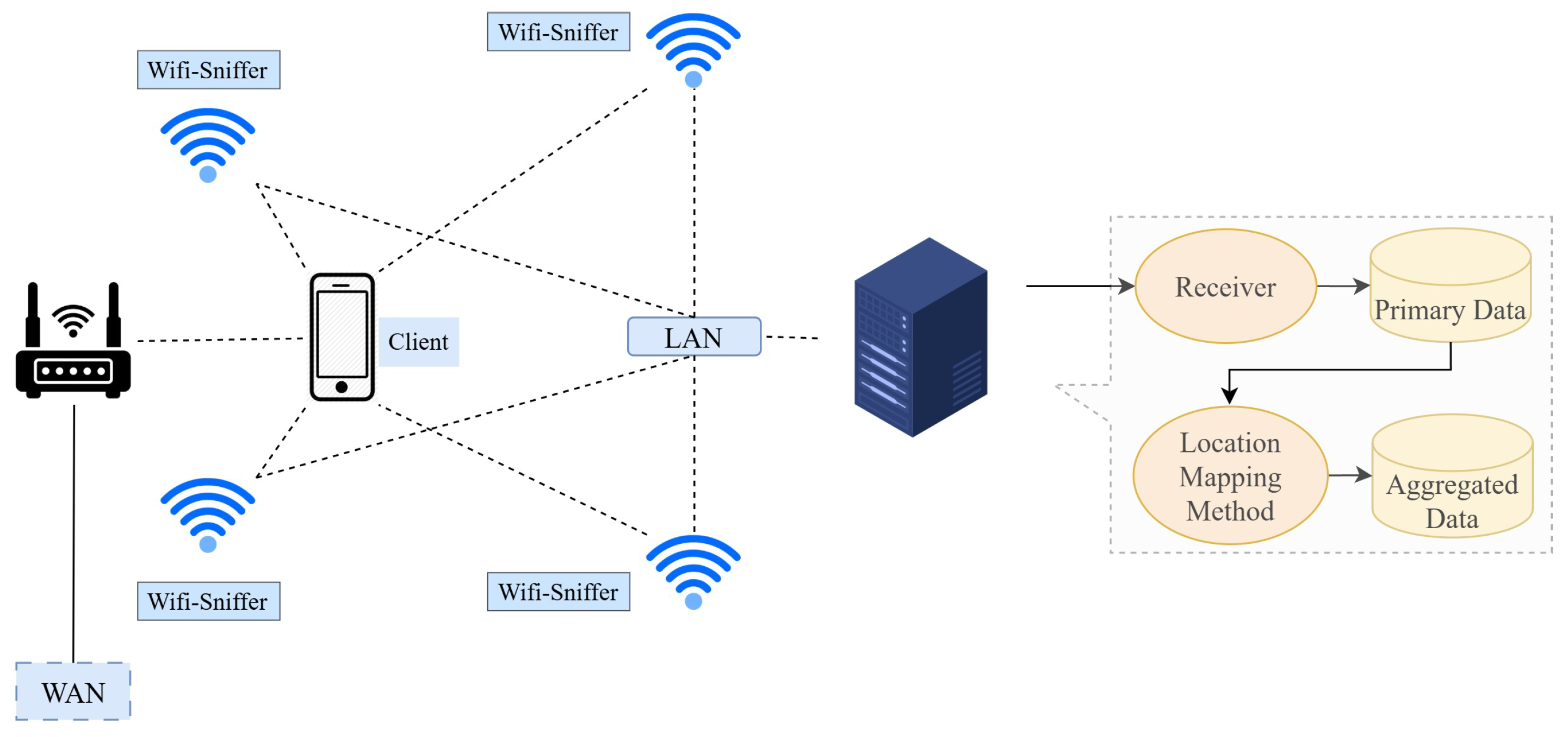
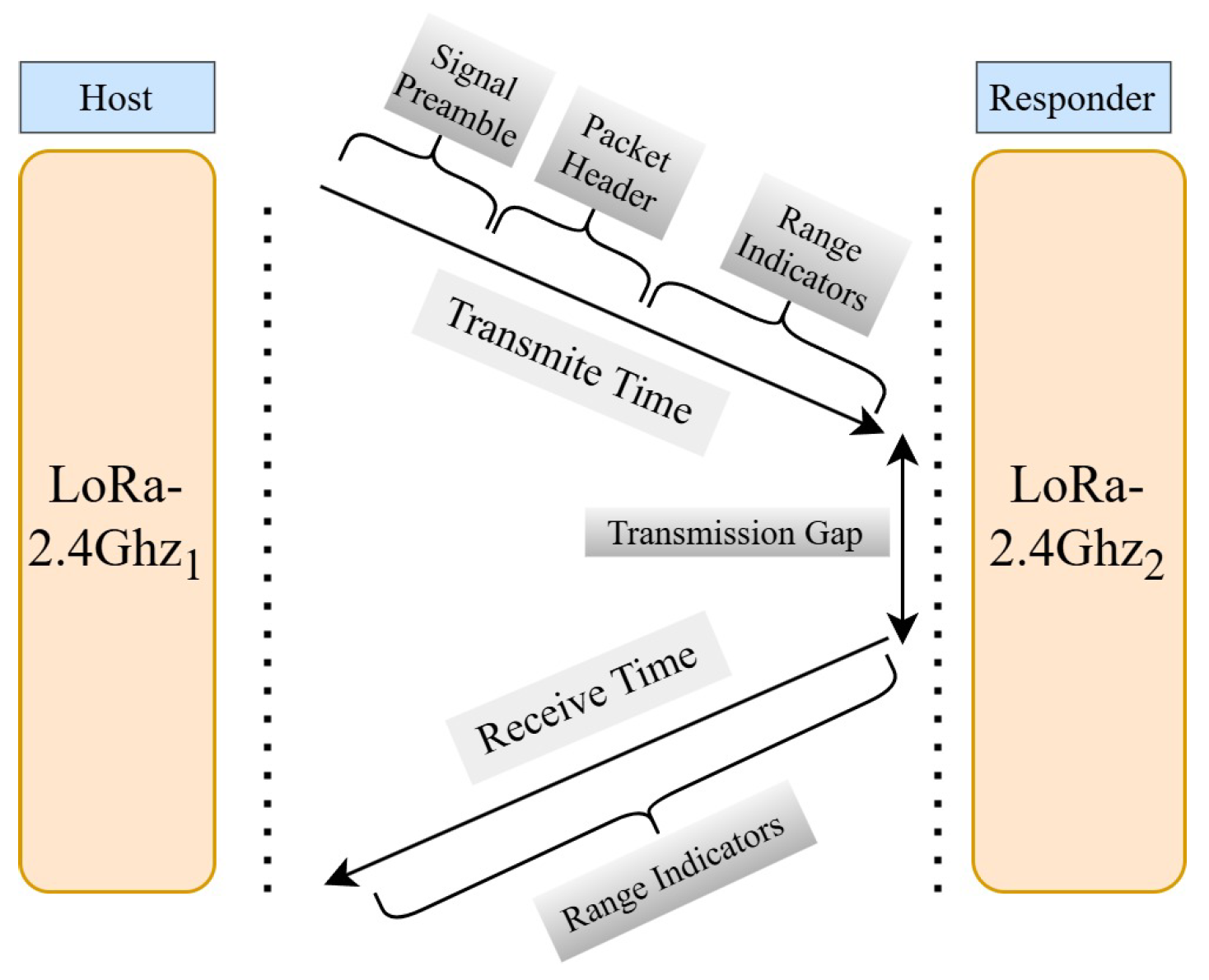
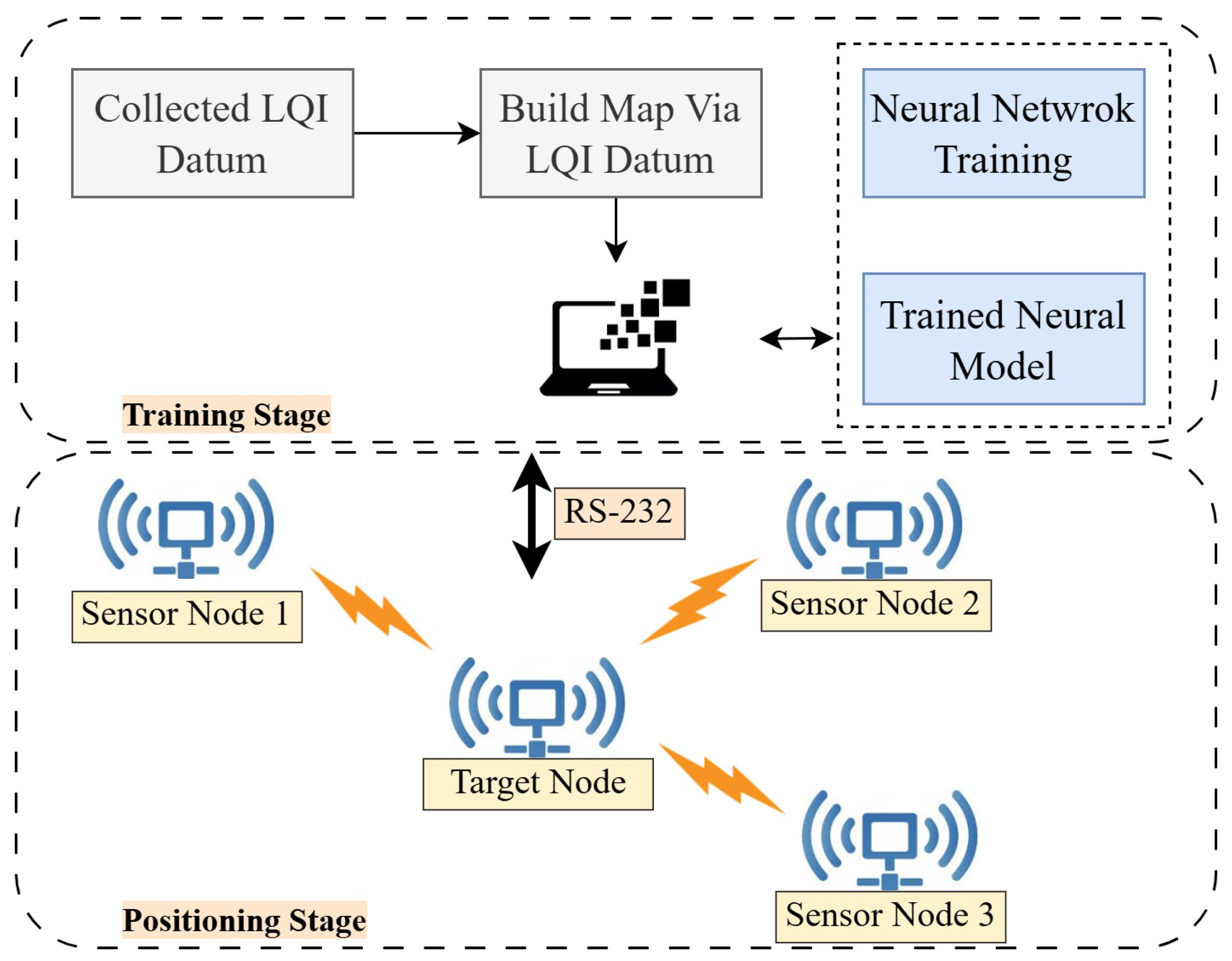
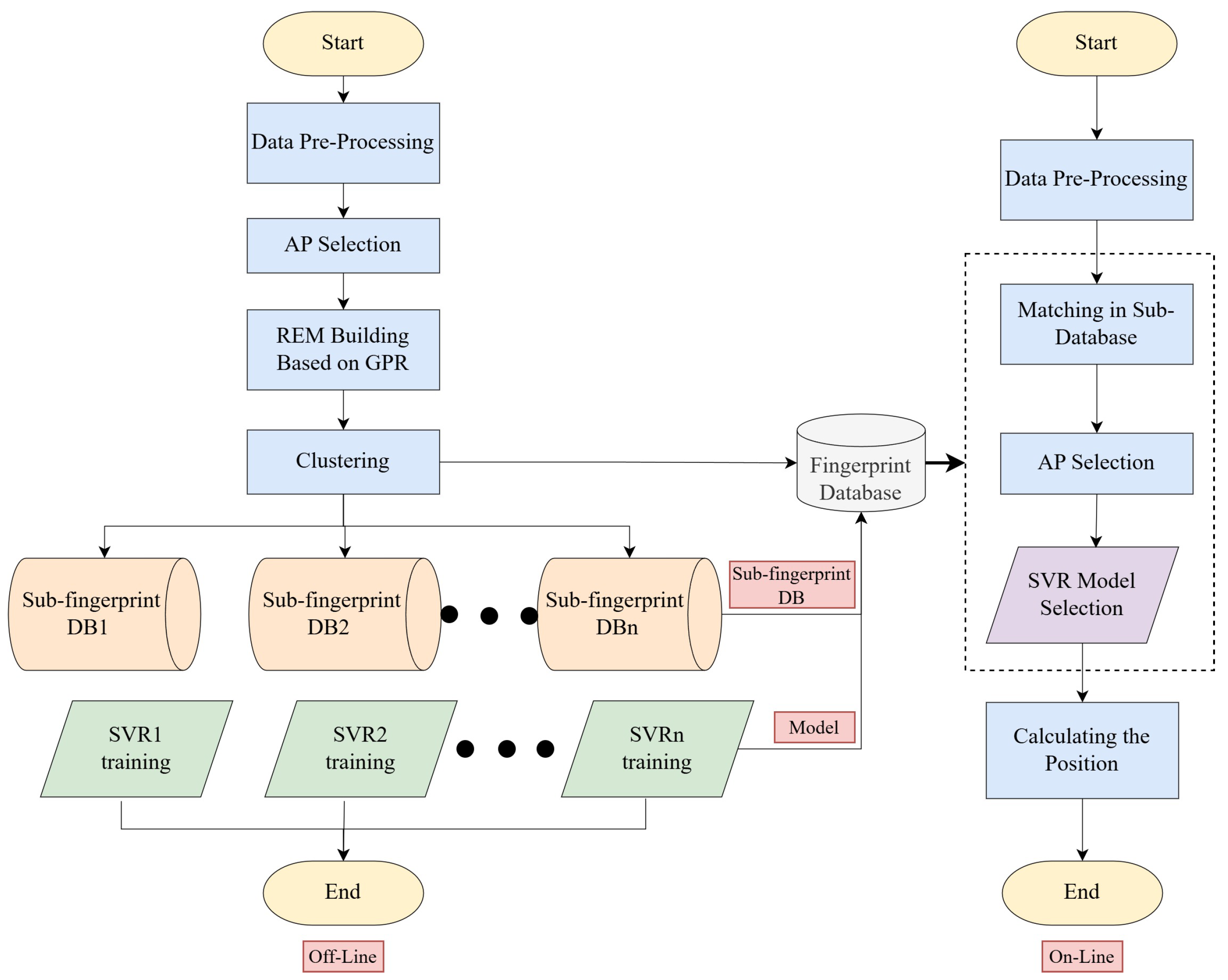
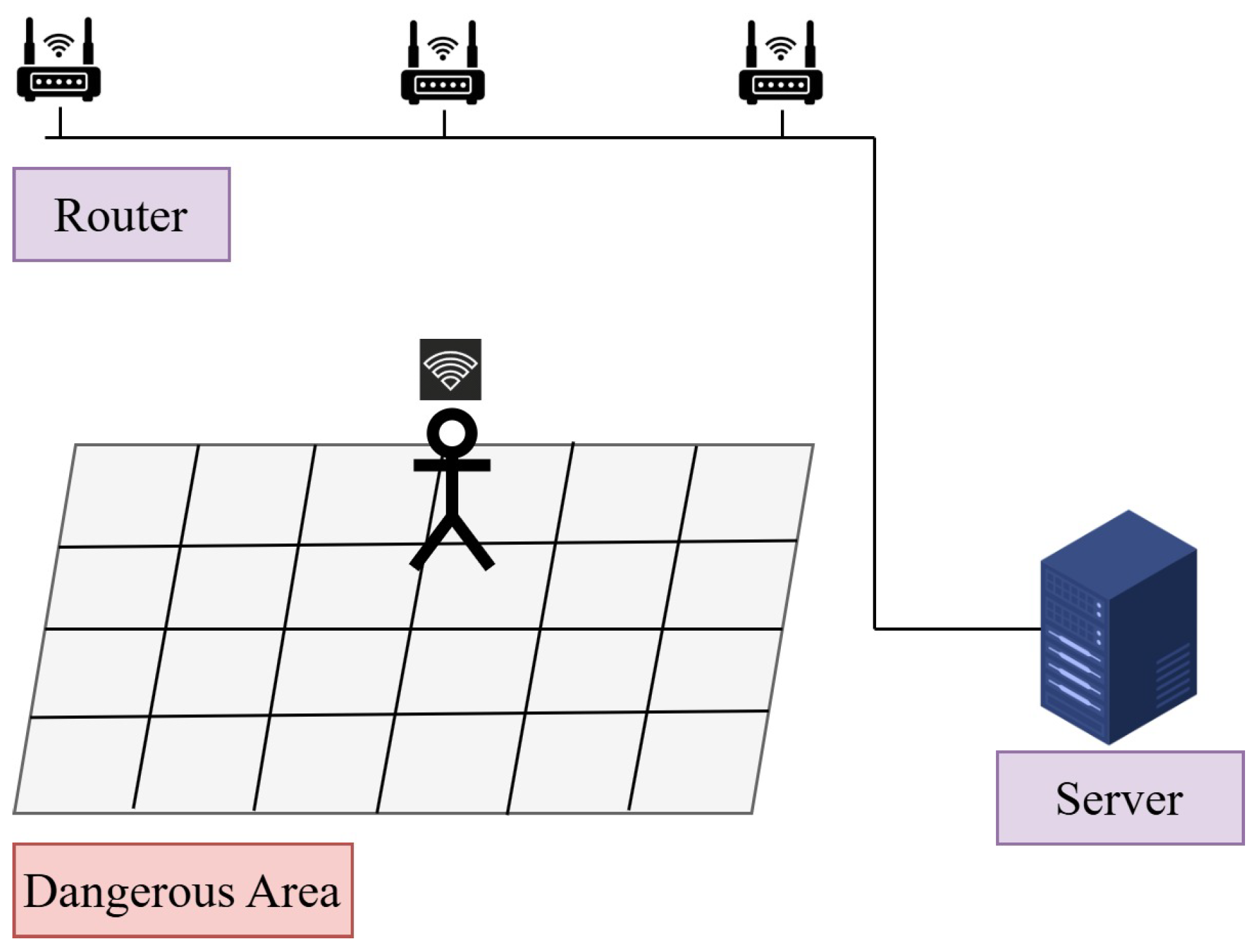
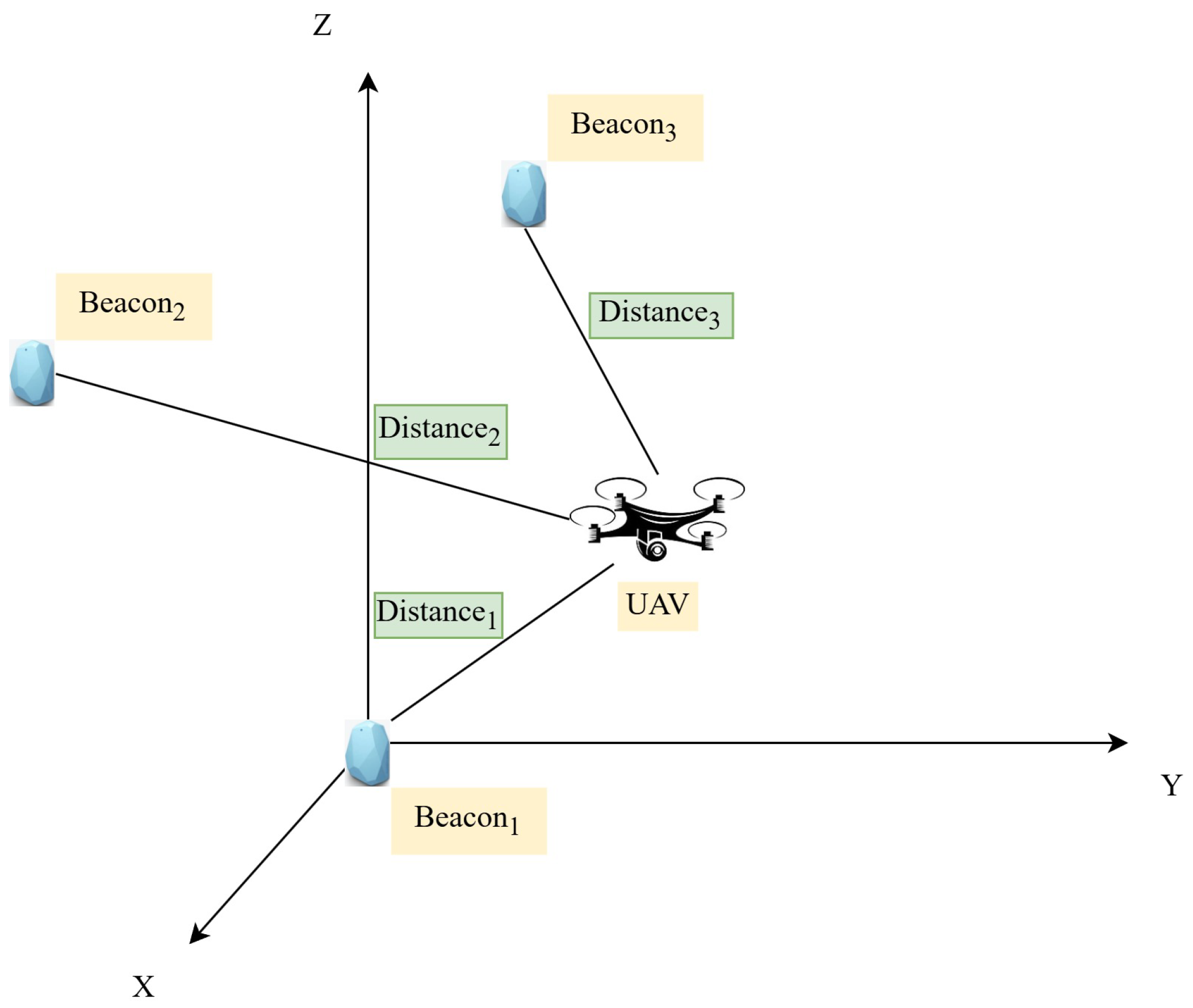
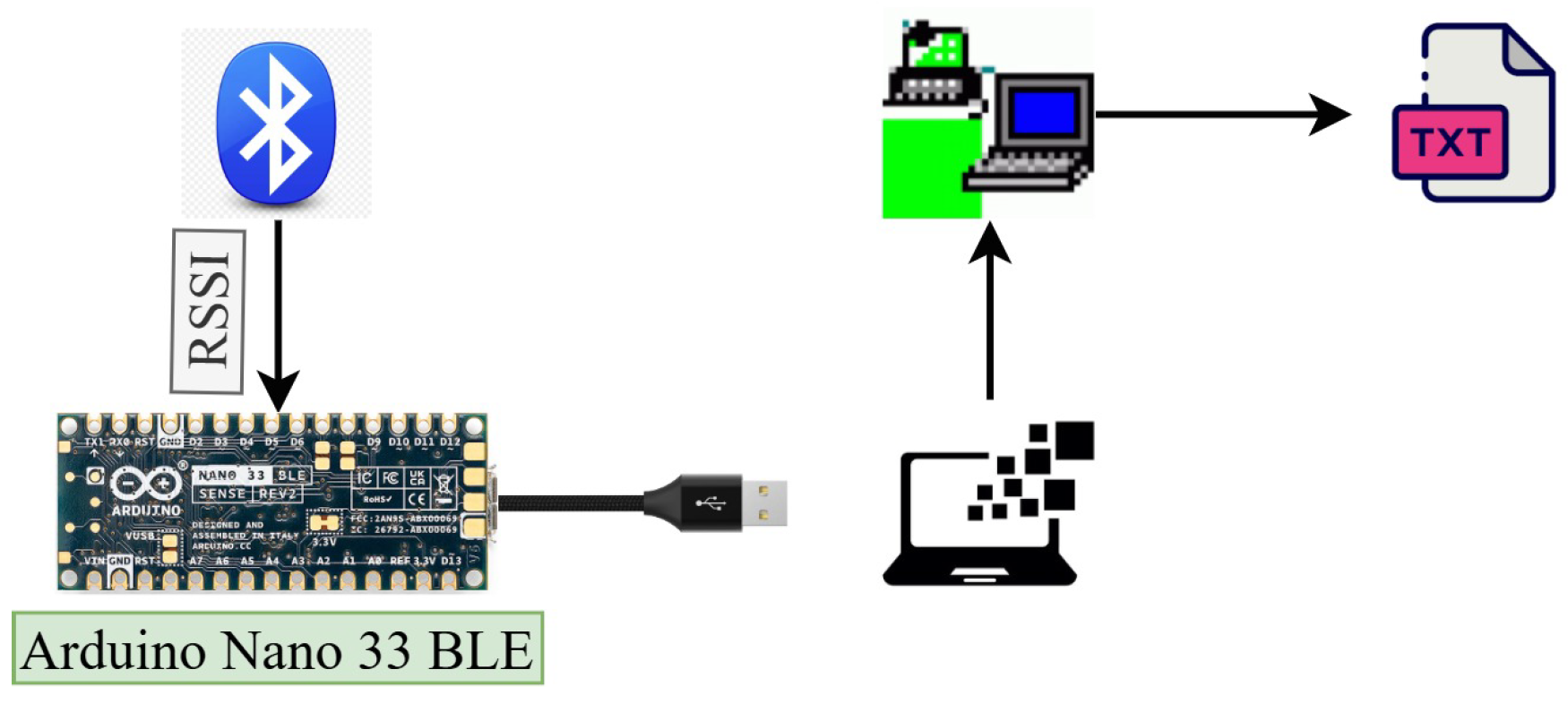
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).