
A Multifunctional Bottomhole Power Drilling Tool Rotary Speed Sensor Based on Triboelectric Nanogenerator

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
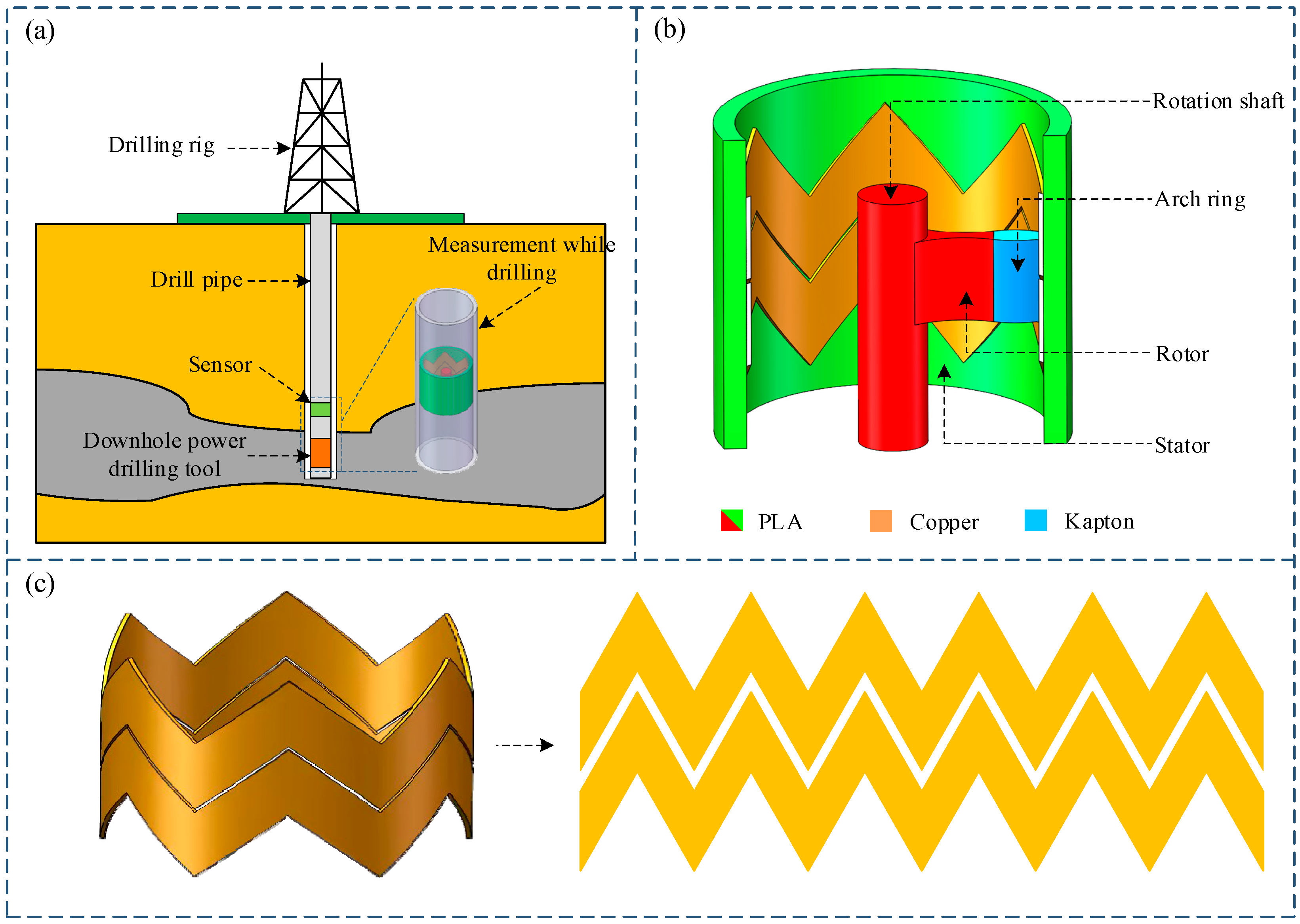
2. Structure and Working Principle
2.1. Sensor Structure
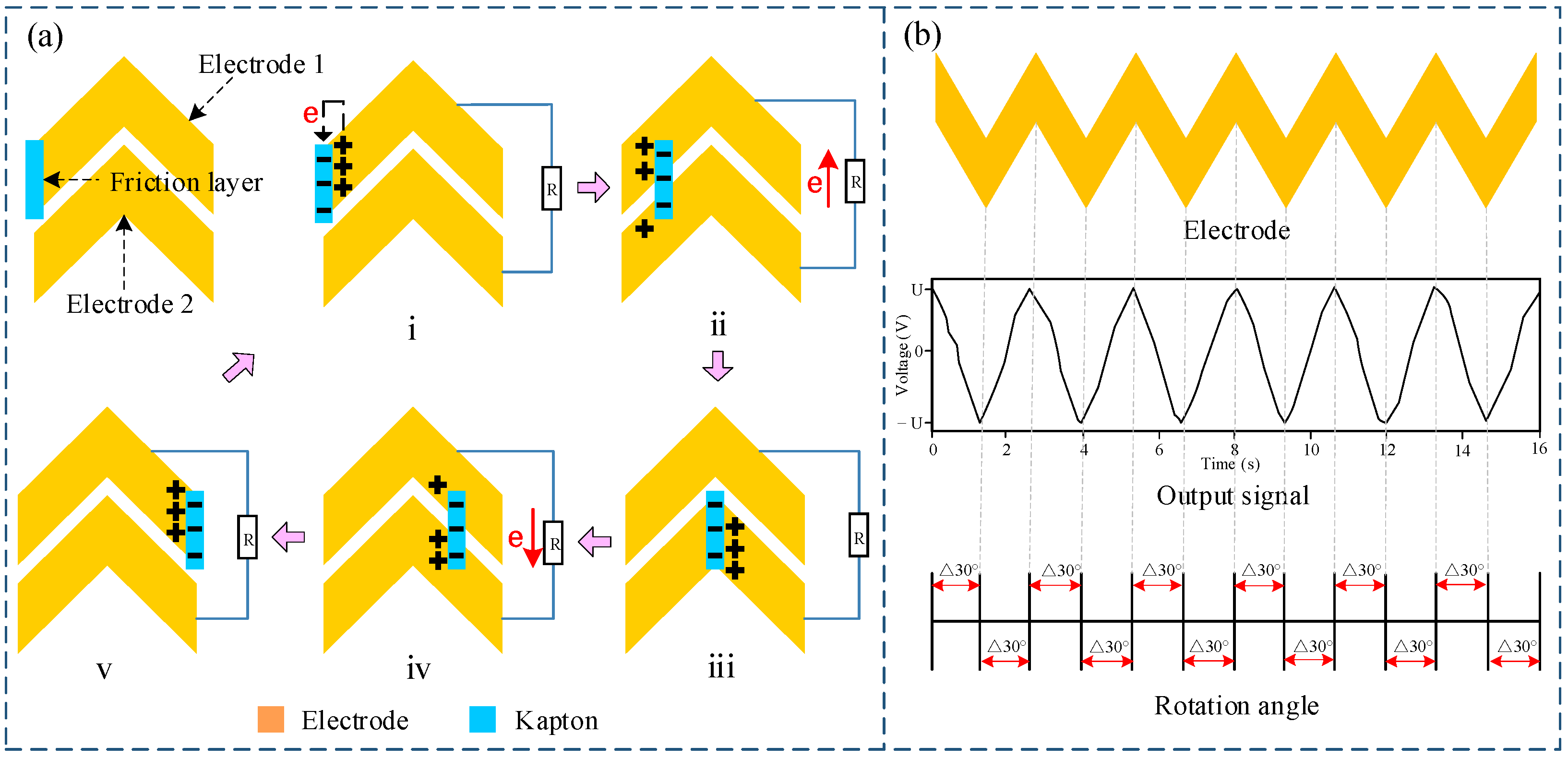
2.2. Working Principle
3. Experiments and Analysis
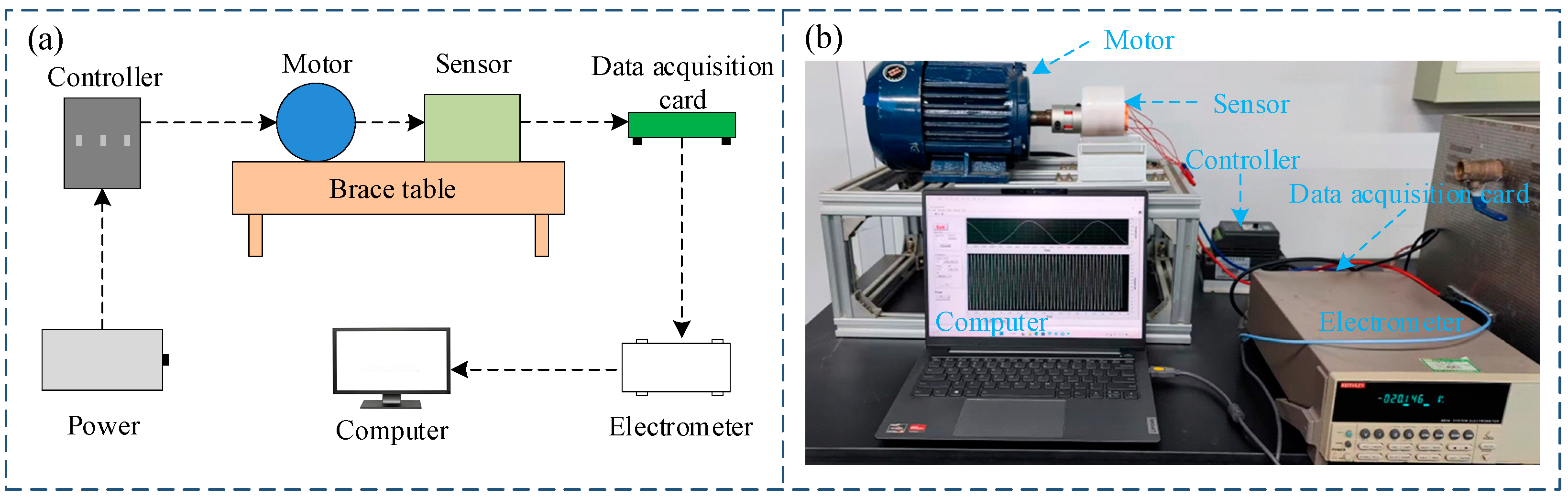
3.1. Experimental Setup
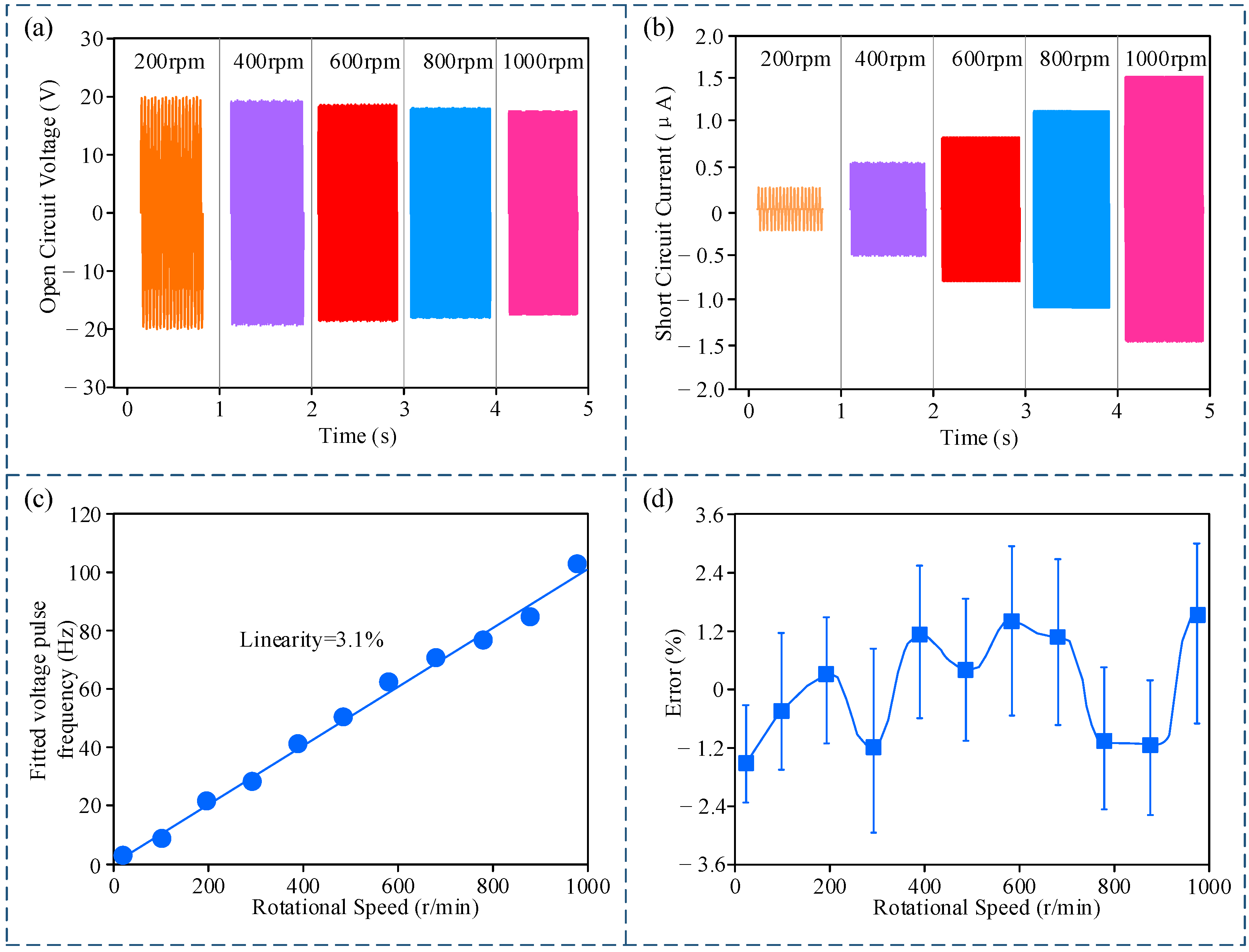
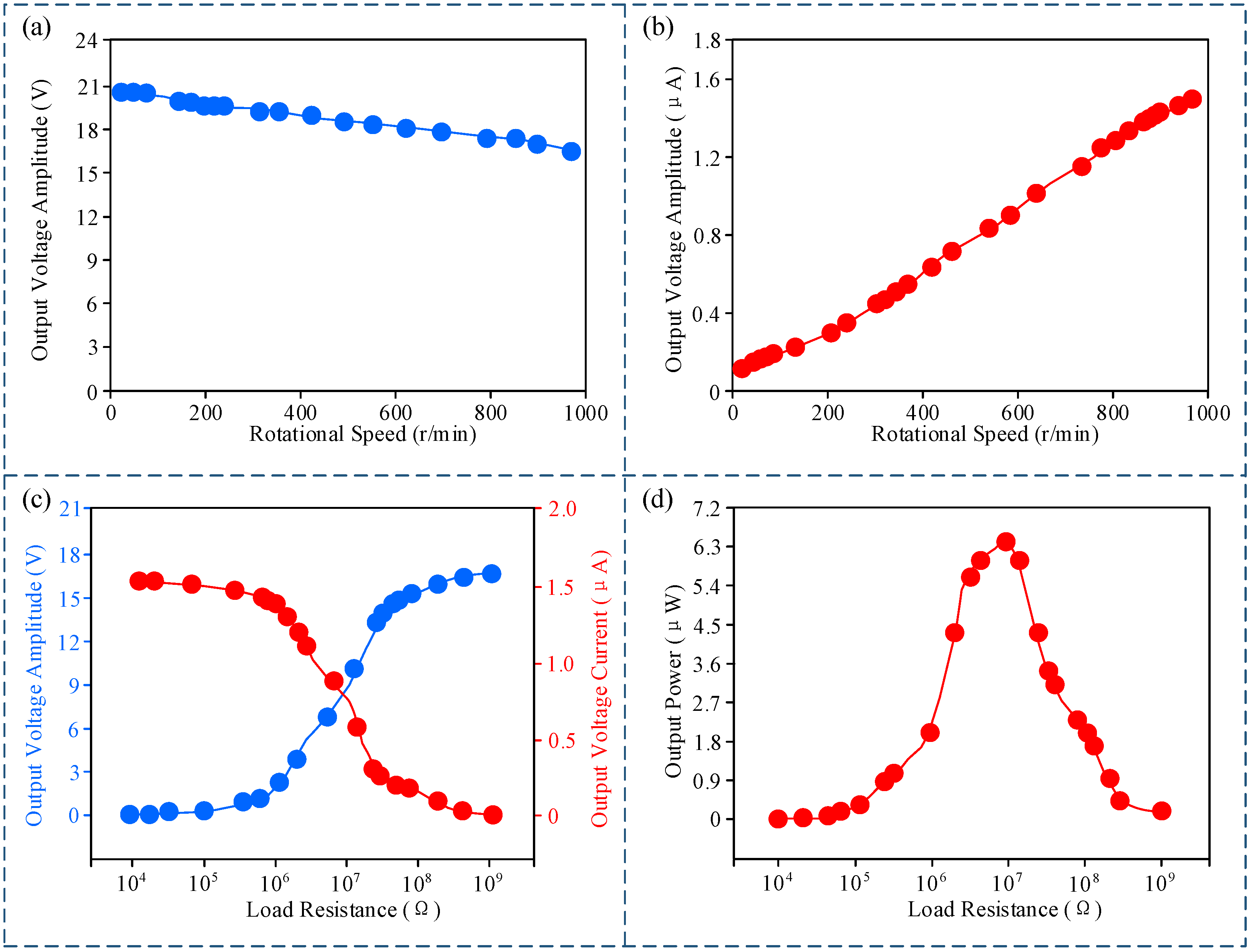
3.2. Rotational Speed Measurement Experiment
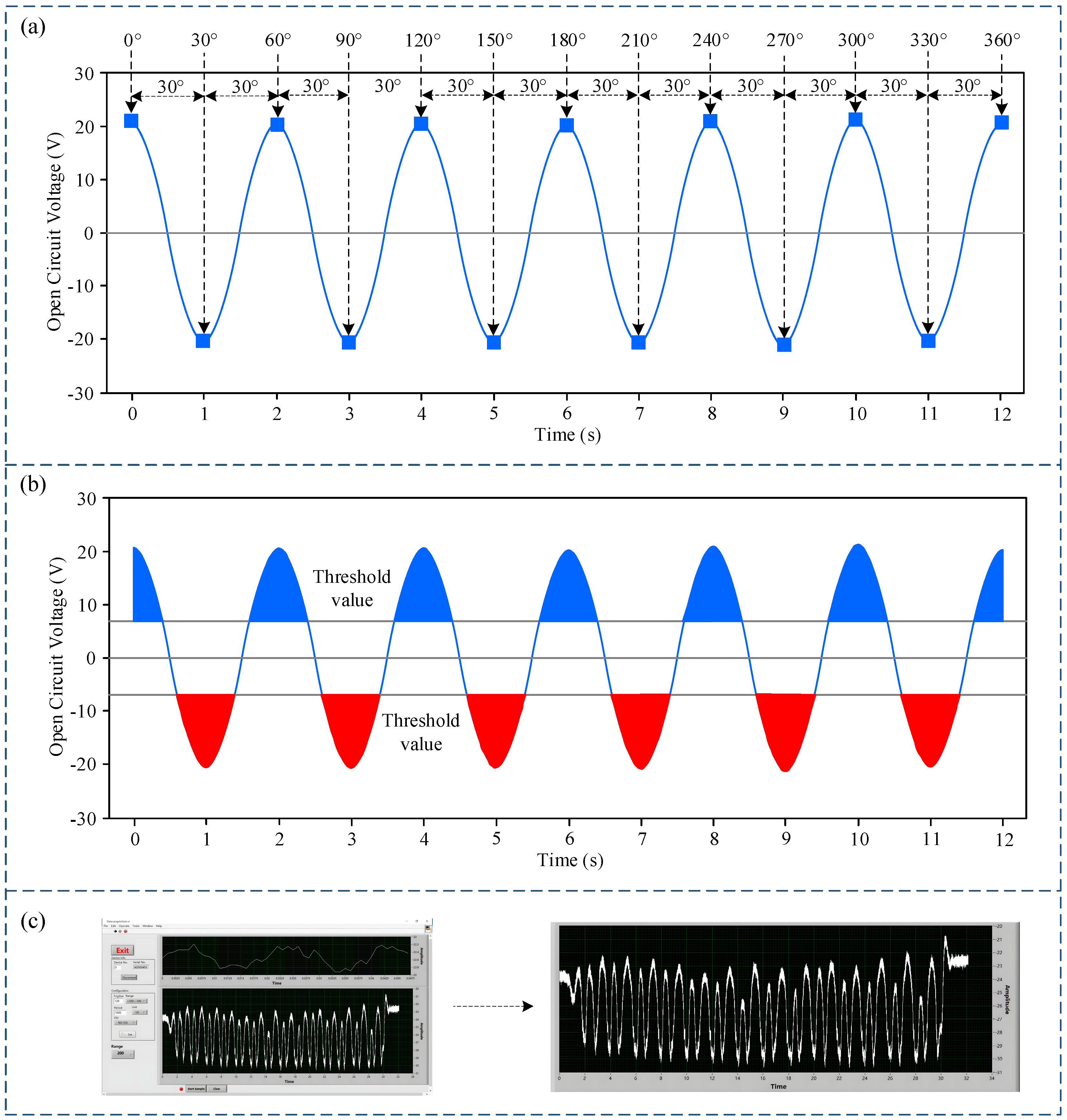
3.3. Relative Rotational Angle Measurement Experiments
3.4. Power Generation Performance Experiments
3.5. Condition Adaptability Experiments
4. Conclusions and Discussions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gowida, A.; Gamal, H.; Elkatatny, S. Exploring the potential of laser technology in oil well drilling: An overview. Geoenergy Sci. Eng. 2023, 230, 212278. [Google Scholar] [CrossRef]
- Ghanitoos, H.; Goharimanesh, M.; Akbari, A. Prediction of drill penetration rate in drilling oil wells using mathematical and neurofuzzy modeling methods. Energy Rep. 2024, 11, 145–152. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, L.; Gao, Y.; Shi, P.; Wang, Y.; Kong, L. Research on Erosion Damage Laws and Structural Optimization of Bypass Valve for Positive Displacement Motors. Processes 2024, 12, 1953. [Google Scholar] [CrossRef]
- Gong, Y.; Liu, Y.; Peng, C. Hydraulic loss analysis of turbodrill blade cascades based on entropy production theory. Geoenergy Sci. Eng. 2024, 241, 213093. [Google Scholar] [CrossRef]
- Alsaihati, A.; Elkatatny, S.; Mahmoud, A.A.; Abdulraheem, A. Use of machine learning and data analytics to detect downhole abnormalities while drilling horizontal wells, with real case study. J. Energy Resour. Technol. 2021, 143, 043201. [Google Scholar] [CrossRef]
- Mirzaei, M.; Ripka, P.; Grim, V. A novel structure of an eddy current sensor for speed measurement of rotating shafts. IEEE Trans. Energy Convers. 2022, 38, 170–179. [Google Scholar] [CrossRef]
- Lu, C.; Zhu, R.; Yu, F.; Jiang, X.; Liu, Z.; Dong, L.; Hua, Q.; Ou, Z. Gear rotational speed sensor based on FeCoSiB/Pb(Zr,Ti)O3 magnetoelectric composite. Measurement 2021, 168, 108409. [Google Scholar] [CrossRef]
- Li, Z.-M.; Chen, L.-L.; Ren, Y.; Qiu, S.; Liu, T.; Wang, C.; Wang, H. Laser-Based Detection of Rotation Speed with High Accuracy and High signal-to-Noise Ratio (SNR) Based on the Rotational Doppler Effect. Lasers Eng. 2021, 50, 367. [Google Scholar]
- Chen, C.; Ma, T.; Jin, H.; Wu, Y.; Hou, Z.; Li, F. Torque and rotational speed sensor based on resistance and capacitive grating for rotational shaft of mechanical systems. Mech. Syst. Signal Process. 2020, 142, 106737. [Google Scholar] [CrossRef]
- Fan, F.R.; Tian, Z.Q.; Wang, Z.L. Flexible triboelectric generator. Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Wang, Z.L.; Yang, Y.; Zhai, J.; Wang, J. (Eds.) Handbook of Triboelectric Nanogenerators; Springer Nature: Berlin/Heidelberg, Germany, 2023. [Google Scholar]
- Cheng, T.; Shao, J.; Wang, Z.L. Triboelectric nanogenerators. Nat. Rev. Methods Primers 2023, 3, 39. [Google Scholar] [CrossRef]
- Prasanna, A.P.S.; Anithkumar, M.; Kim, S.J. Hybrid Triboelectric Nanogenerators: Revolutionizing the Energy Harvesting through Material Diversity and Device Architecture for Different Applications. Nano Energy 2024, 131, 110253. [Google Scholar] [CrossRef]
- Pan, Y.C.; Dai, Z.; Ma, H.; Zheng, J.; Leng, J.; Xie, C.; Yuan, Y.; Yang, W.; Yalikun, Y.; Song, X.; et al. Self-powered and speed-adjustable sensor for abyssal ocean current measurements based on triboelectric nanogenerators. Nat. Commun. 2024, 15, 6133. [Google Scholar] [CrossRef] [PubMed]
- Hajara, P.; Shijeesh, M.R.; Rose, T.P.; Saji, K.J. ZnO-based triboelectric nanogenerator and tribotronic transistor for tactile switch and displacement sensor applications. Sens. Actuators A Phys. 2024, 377, 115728. [Google Scholar] [CrossRef]
- Chen, Z.; Xu, M.; Zhou, C.; Hu, Z.; Du, Z.; Fu, X.; Song, Y.; Jia, Y.; Wen, X.; Wang, J.; et al. Phase transformation enabled textile triboelectric nanogenerators for wearable energy harvesting and personal thermoregulation. Nano Energy 2024, 132, 110361. [Google Scholar] [CrossRef]
- Gao, Y.; Xu, B.; Tan, D.; Li, M.; Wang, Y.; Yang, Y. Asymmetric-elastic-structure fabric-based triboelectric nanogenerators for wearable energy harvesting and human motion sensing. Chem. Eng. J. 2023, 466, 143079. [Google Scholar] [CrossRef]
- Chen, C.; Guo, D.; Tuo, L.; Wen, Y.; Li, J.; Qu, H.; Wen, H.; Wan, L.; Liu, G.; Guo, H. One Meter Triboelectric Nanogenerator for Efficient Harvesting of Meter-Scale Wave Energy. Adv. Funct. Mater. 2024, 34, 2406775. [Google Scholar] [CrossRef]
- Mu, Q.; He, W.; Shan, C.; Fu, S.; Du, S.; Wang, J.; Wang, Z.; Li, K.; Hu, C. Achieving High-Efficiency Wind Energy Harvesting Triboelectric Nanogenerator by Coupling Soft Contact, Charge Space Accumulation, and Charge Dissipation Design. Adv. Funct. Mater. 2024, 34, 2309421. [Google Scholar] [CrossRef]
- Choi, J.A.; Jeong, J.; Kang, M.; Ko, H.J.; Kim, T.; Park, K.; Kim, J.; Pyo, S. Externally motionless triboelectric nanogenerator based on vortex-induced rolling for omnidirectional wind energy harvesting. Nano Energy 2024, 119, 109071. [Google Scholar] [CrossRef]
- Cao, Y.; Su, E.; Sun, Y.; Wang, Z.L.; Cao, L.N. A Rolling-Bead Triboelectric Nanogenerator for Harvesting Omnidirectional Wind-Induced Energy toward Shelter Forests Monitoring. Small 2024, 20, 2307119. [Google Scholar] [CrossRef]
- Dong, Y.; Feng, M.; Cheng, J.; Chang, S.; Wang, D.; Lu, W. Ring-shaped single-electrode triboelectric nanogenerator (RSE-TENG) for energy harvesting and liquid flow rate monitoring of gas-liquid two-phase flow. Nano Energy 2024, 119, 109083. [Google Scholar] [CrossRef]
- Ye, C.; Liu, D.; Chen, P.; Cao, L.N.Y.; Li, X.; Jiang, T.; Wang, Z.L. An integrated solar panel with a triboelectric nanogenerator array for synergistic harvesting of raindrop and solar energy. Adv. Mater. 2023, 35, 2209713. [Google Scholar] [CrossRef]
- Wang, R.; Ren, J.; Ding, W.; Liu, M.; Pan, G.; Wu, C. Research on Vibration Accumulation Self-Powered Downhole Sensor Based on Triboelectric Nanogenerators. Micromachines 2024, 15, 548. [Google Scholar] [CrossRef]
- Feng, Y.; Pan, G.; Wu, C. Experiment Study of Deformable Honeycomb Triboelectric Nanogenerator for Energy Collection and Vibration Measurement in Downhole. Appl. Sci. 2024, 14, 2539. [Google Scholar] [CrossRef]
- Du, T.; Dong, F.; Xi, Z.; Zhu, M.; Zou, Y.; Sun, P.; Xu, M. Recent advances in mechanical vibration energy harvesters based on triboelectric nanogenerators. Small 2023, 19, 2300401. [Google Scholar] [CrossRef]
- Segkos, A.; Tsamis, C. Rotating triboelectric nanogenerators for energy harvesting and their applications. Nanoenergy Adv. 2023, 3, 170–219. [Google Scholar] [CrossRef]
- Zhao, L.; Ling, Q.; Fan, X.; Gu, H. Self-healable, adhesive, anti-drying, freezing-tolerant, and transparent conductive organohydrogel as flexible strain sensor, triboelectric nanogenerator, and skin barrier. ACS Appl. Mater. Interfaces 2023, 15, 40975–40990. [Google Scholar] [CrossRef]
- Lu, P.; Guo, X.; Liao, X.; Liu, Y.; Cai, C.; Meng, X.; Wei, Z.; Du, G.; Shao, Y.; Nie, S.; et al. Advanced Application of Triboelectric Nanogenerators in Gas Sensing. Nano Energy 2024, 126, 109672. [Google Scholar] [CrossRef]
- Veeralingam, S.; Badhulika, S. Ti@ MoS2 incorporated Polypropylene/Nylon fabric-based porous, breathable triboelectric nanogenerator as respiration sensor and ammonia gas sensor applications. Sens. Actuators B Chem. 2023, 380, 133346. [Google Scholar] [CrossRef]
- Chandrasekhar, A.; Basith, S.A.; Vivekananthan, V.; Khandelwal, G.; Raj, N.P.M.J.; Purusothaman, Y.; Kim, S.J. Smart maracas: An innovative triboelectric nanogenerator for earthquake detection and energy harvesting. Nano Energy 2024, 123, 109379. [Google Scholar] [CrossRef]
- Cao, L.N.Y.; Xu, Z.; Wang, Z.L. Application of triboelectric nanogenerator in fluid dynamics sensing: Past and future. Nanomaterials 2022, 12, 3261. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Zhang, D.; Tang, M.; Zhang, H.; Sun, T.; Yang, C.; Mao, R.; Li, K.; Wang, J. Ethylene chlorotrifluoroethylene/hydrogel-based liquid-solid triboelectric nanogenerator driven self-powered MXene-based sensor system for marine environmental monitoring. Nano Energy 2022, 100, 107509. [Google Scholar] [CrossRef]
- Panda, S.; Jeong, H.; Hajra, S.; Rajaitha, P.; Hong, S.; Kim, H.J. Biocompatible polydopamine based triboelectric nanogenerator for humidity sensing. Sens. Actuators B Chem. 2023, 394, 134384. [Google Scholar] [CrossRef]
- Mohamadbeigi, N.; Shooshtari, L.; Fardindoost, S.; Vafaiee, M.; Zad, A.I.; Mohammadpour, R. Self-powered triboelectric nanogenerator sensor for detecting humidity level and monitoring ethanol variation in a simulated exhalation environment. Sci. Rep. 2024, 14, 1562. [Google Scholar] [CrossRef]
- Wu, C.; Zou, H. Research on self-powered rainfall sensor suitable for landslide monitoring based on triboelectric nanogenerator. IEEE Sens. J. 2023, 24, 2620–2627. [Google Scholar] [CrossRef]
- Domingos, I.; Saadi, Z.; Sadanandan, K.S.; Pocinho, H.A.; Caetano, D.M.; Neves, A.I.; Craciun, M.F.; Alves, H. Printed graphene electrodes for textile-embedded triboelectric nanogenerators for biomechanical sensing. Nano Energy 2023, 115, 108688. [Google Scholar] [CrossRef]
- Jaurker, D.; Gupta, P.; Sahu, A.; Joshi, S.S.; Palani, I. Investigation of Laser micro-textured triboelectric nanogenerator based self-powered vibration sensor for industry 4.0 application. Sens. Actuators A Phys. 2024, 377, 115679. [Google Scholar] [CrossRef]
- Kaushik, P.S.; Gupta, P.; Diksha, J.; Tripathi, A.S.; Joshi, S.S.; Palani, I.A. Investigation of laser-textured triboelectric nanogenerator for vibration sensing of machine tools. Smart Mater. Struct. 2023, 32, 085028. [Google Scholar]
- Gao, S.; Li, G.; Wu, S.; Cheng, T.X.; Sha, Z.; He, S.; Peng, S.; Wang, C.H. High-bandwidth self-powered vibration sensors based on triboelectric particle-surface interactions. Nano Energy 2024, 119, 109060. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, J.; Liang, J.; Cao, L.; Zhang, H. A Multifunctional Bottomhole Power Drilling Tool Rotary Speed Sensor Based on Triboelectric Nanogenerator. Appl. Sci. 2025, 15, 3196. https://doi.org/10.3390/app15063196
Yan J, Liang J, Cao L, Zhang H. A Multifunctional Bottomhole Power Drilling Tool Rotary Speed Sensor Based on Triboelectric Nanogenerator. Applied Sciences. 2025; 15(6):3196. https://doi.org/10.3390/app15063196
Chicago/Turabian StyleYan, Jia, Jian Liang, Longlong Cao, and Hengchun Zhang. 2025. "A Multifunctional Bottomhole Power Drilling Tool Rotary Speed Sensor Based on Triboelectric Nanogenerator" Applied Sciences 15, no. 6: 3196. https://doi.org/10.3390/app15063196
APA StyleYan, J., Liang, J., Cao, L., & Zhang, H. (2025). A Multifunctional Bottomhole Power Drilling Tool Rotary Speed Sensor Based on Triboelectric Nanogenerator. Applied Sciences, 15(6), 3196. https://doi.org/10.3390/app15063196