
Innovative Detachable Two-Way Wheelchair Propulsion System: Enhancing Mobility and Exercise for Spinal Cord Injury Users



Abstract
:1. Introduction
2. Materials and Methods
2.1. Conceptualization of the Detachable Two-Way Propulsion System for a Manual Wheelchair
2.2. Preliminary Interviews for the Two-Way Propulsion System
2.2.1. Focus Group Interviews
2.2.2. Expert Interviews
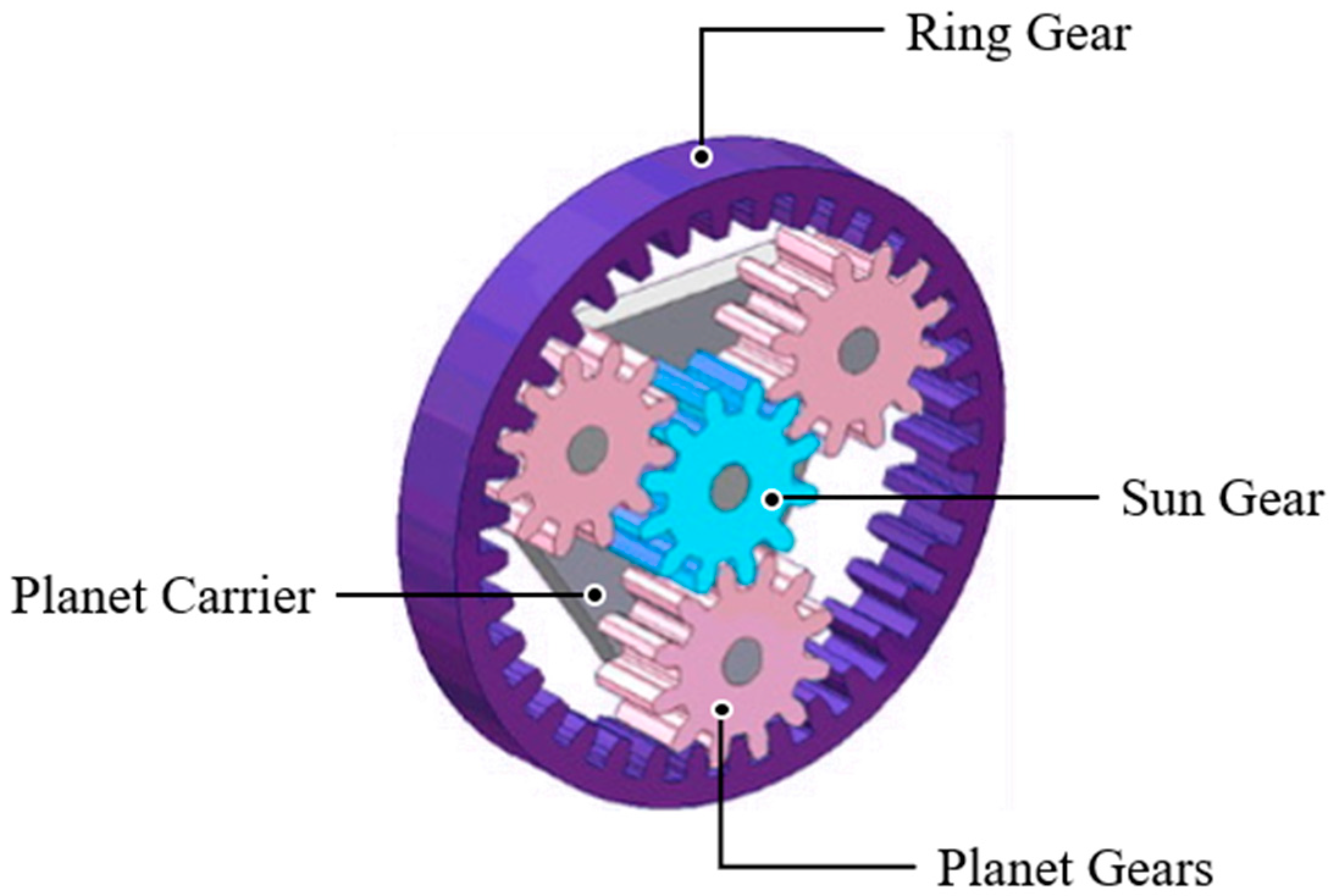
2.3. Planetary Gear Train
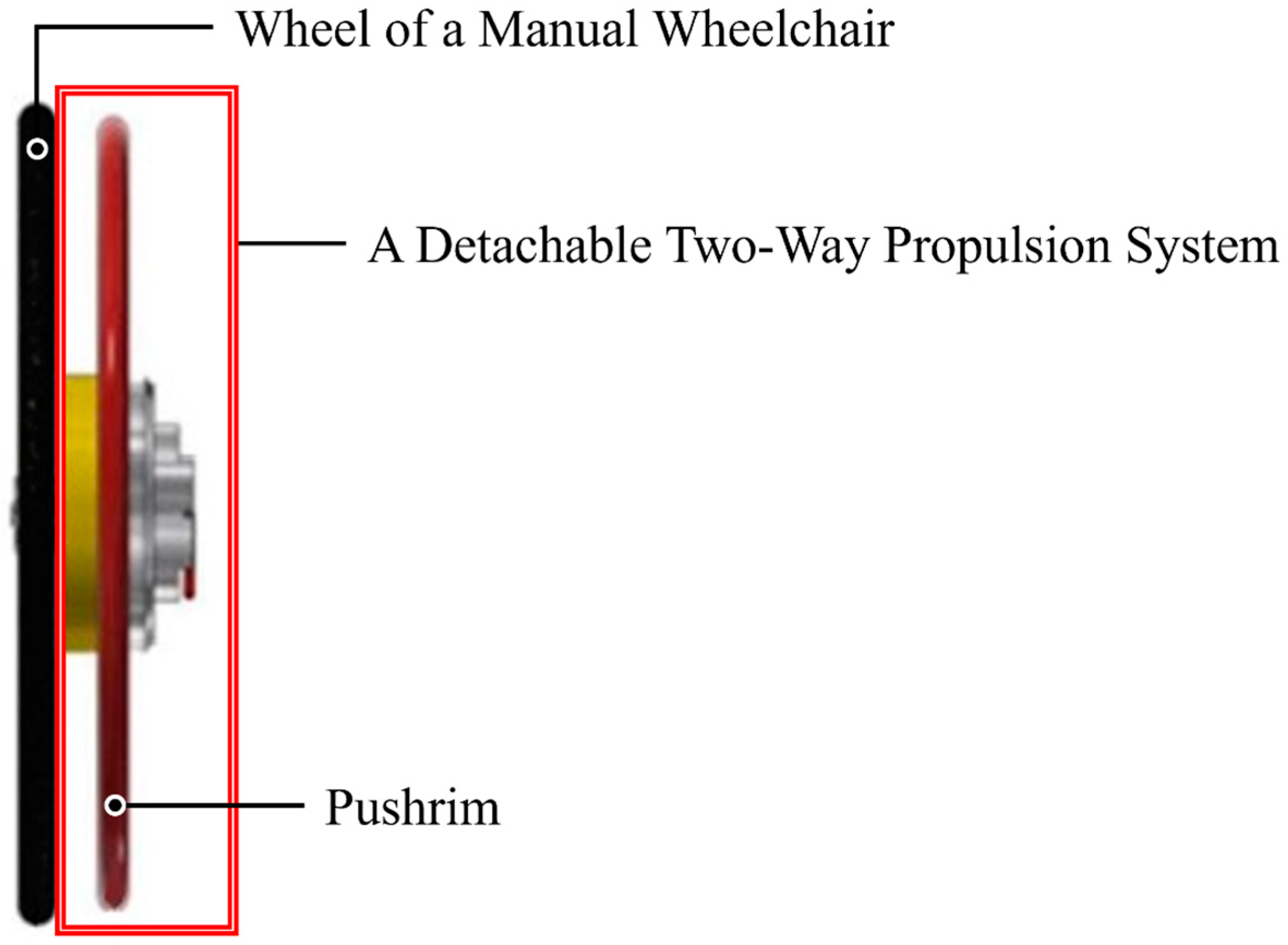
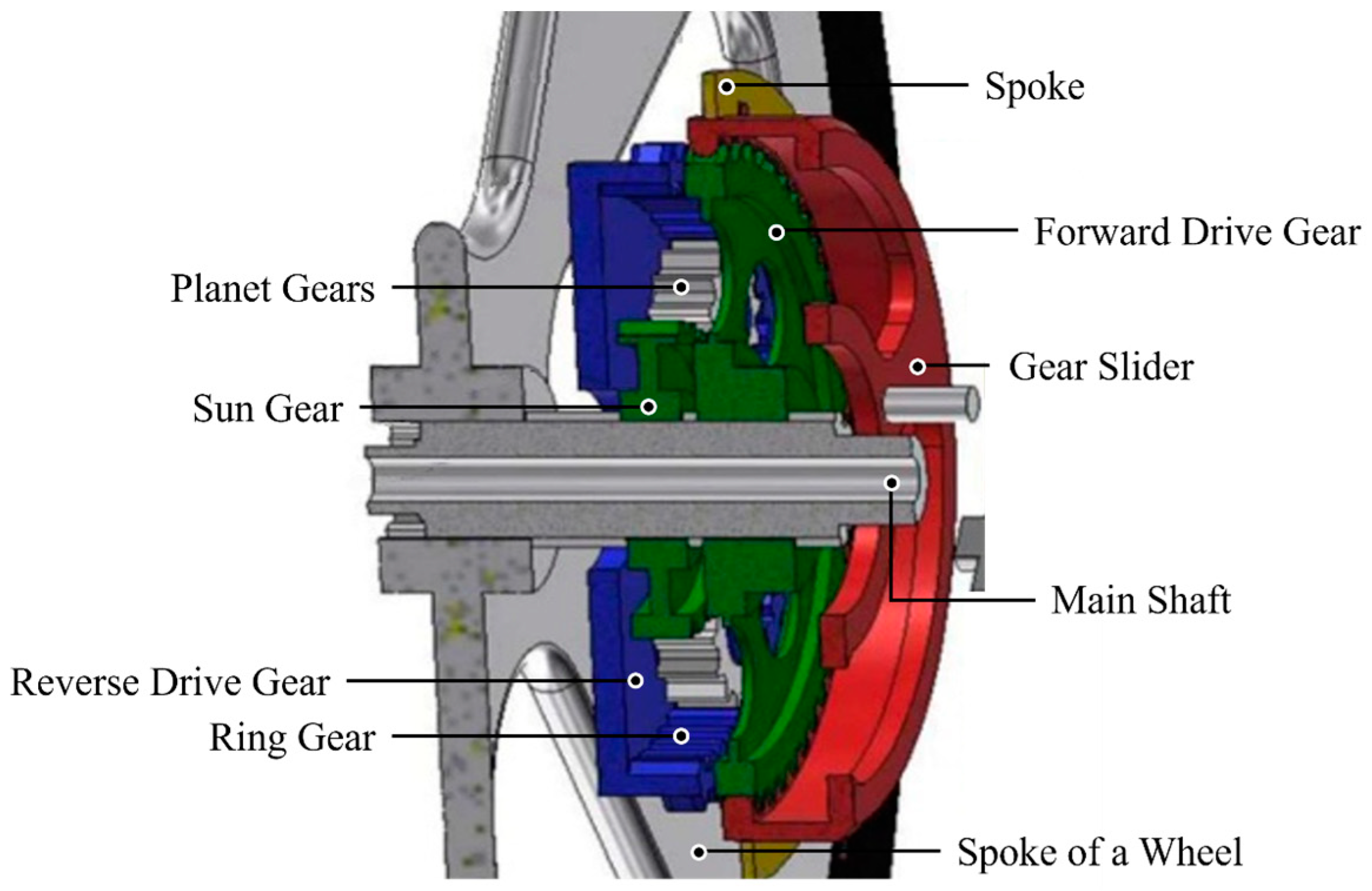
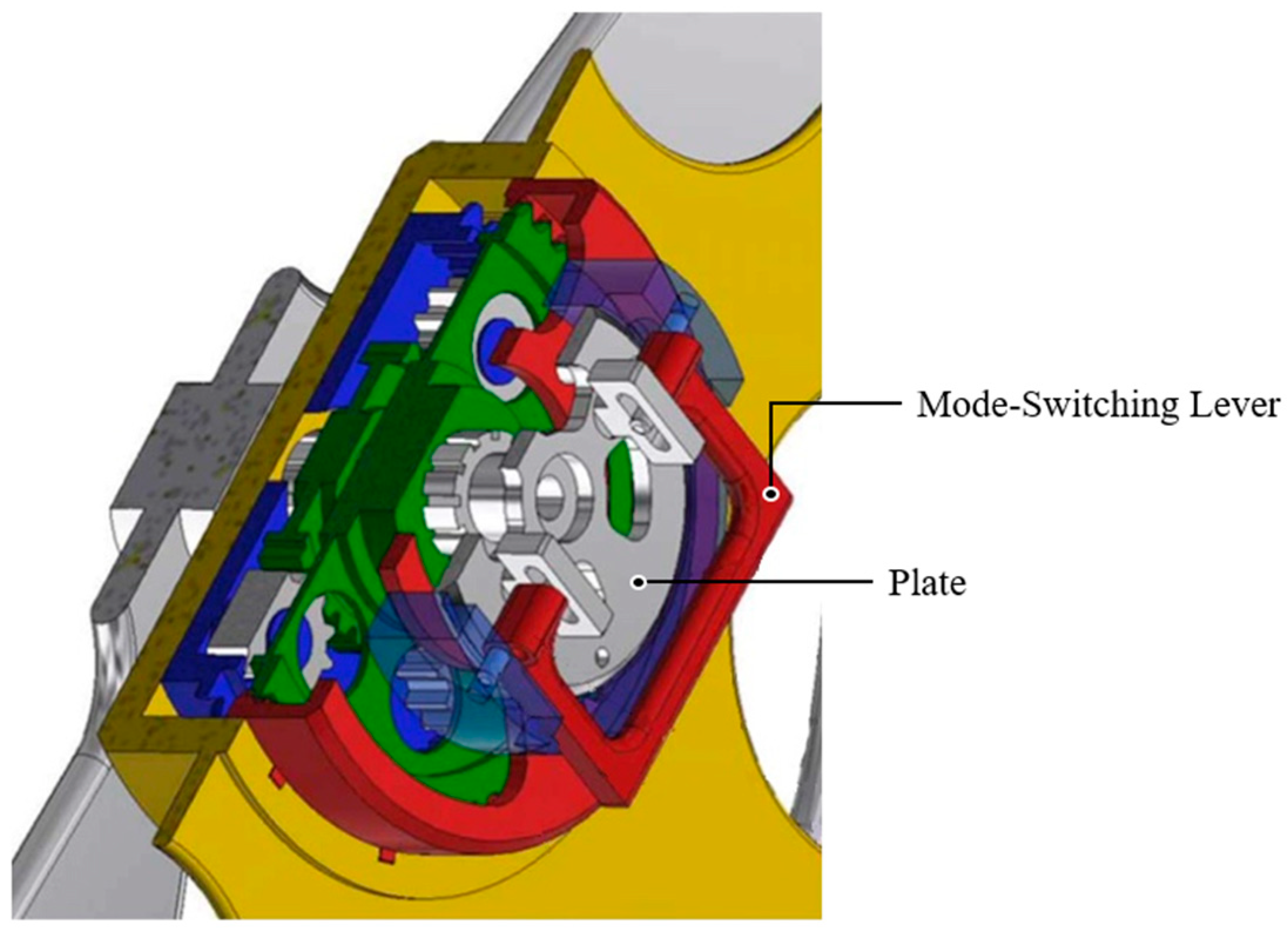
2.4. Design of the Detachable Two-Way Propulsion System
2.5. Pilot Test of the Two-Way Propulsion System
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SCI | Spinal Cord Injury |
| FGI | Focus Group Interview |
References
- Thurman, D.J.; Sniezek, J.E.; Johnson, D.; Greenspane, A.; Smith, S.M. Guidelines for Surveillance of Central Nervous System Injury; Departament of Health and Human Services: Washington, DC, USA, 1995.
- Yang, R.; Guo, L.; Wang, P.; Huang, L.; Tang, Y.; Wang, W.; Shen, H. Epidemiology of spinal cord injuries and risk factors for complete injuries in Guangdong, China: A retrospective study. PLoS ONE 2014, 9, e84733. [Google Scholar] [CrossRef]
- Bjerkefors, A.; Carpenter, M.G.; Cresswell, A.G.; Thorstensson, A. Trunk muscle activation in a person with clinically complete thoracic spinal cord injury. J. Rehabil. Med. 2009, 41, 390–392. [Google Scholar] [CrossRef] [PubMed]
- Marchiori, C.; Gagnon, D.H.; Pradon, D. Quantification of the risk of musculoskeletal disorders of the upper limb using fuzzy logic: A study of manual wheelchair propulsion. Sensors 2023, 23, 8659. [Google Scholar] [CrossRef]
- Samuelsson, K.A.M.; Tropp, H.; Gerdle, B. Shoulder pain and its consequences in paraplegic spinal cord-injured, wheelchair users. Spinal Cord 2004, 42, 41–46. [Google Scholar] [CrossRef] [PubMed]
- Toor, H.; Khan, S.J.; Iqbal, H.; Tahir, M.; Amjad, B.; Afzal, M.; Usman, J. Pushing a manual wheelchair requires more muscular force than pulling. In Proceedings of the 2nd International Conference for Innovation in Biomedical Engineering and Life Sciences: ICIBEL 2017 (in conjunction with APCMBE 2017), Penang, Malaysia, 10–13 December 2017; Springer: Singapore, 2018; pp. 43–47. [Google Scholar]
- Alm, M.; Saraste, H.; Norrbrink, C. Shoulder pain in persons with thoracic spinal cord injury: Prevalence and characteristics. J. Rehabil. Med. 2008, 40, 277–283. [Google Scholar] [CrossRef] [PubMed]
- Bernard, B.P.; Putz-Anderson, V. Musculoskeletal Disorders and Workplace Factors: A Critical Review of Epidemiologic Evidence for Work-Related Musculoskeletal Disorders of the Neck, Upper Extremity, and Low Back; National Institute for Occupational Safety and Health: Cincinnati, OH, USA, 1997.
- Gallagher, S.; Heberger, J.R. Examining the interaction of force and repetition on musculoskeletal disorder risk: A systematic literature review. Hum. Factors 2013, 55, 108–124. [Google Scholar] [CrossRef] [PubMed]
- Hoogreendoorn, W.E.; Van Poppel, M.N.; Bongers, P.M.; Koes, B.W.; Bouter, L.M. Physical load during work and leisure time as risk factors for back pain. Scand. J. Work. Environ. Health 1999, 25, 387–403. [Google Scholar] [CrossRef]
- Lee, T.Q.; McMahon, P.J. Shoulder biomechanics and muscle plasticity: Implications in spinal cord injury. Clin. Orthop. Relat. Res. 2002, 403, S26–S36. [Google Scholar] [CrossRef]
- Apple, D.F.; Cody, R.; Allen, A. Overuse Syndrome of the Upper Limb in People with Spinal Cord Injury. In Physical Fitness: A Guide for Individuals with Spinal Cord Injury; University of Michigan Library: Ann Arbor, MI, USA, 1996; Volume 26, pp. 97–108. [Google Scholar]
- Burnham, R.S.; May, L.; Nelson, E.; Steadward, R.; Reid, D.C. Shoulder pain in wheelchair athletes: The role of muscle imbalance. Am. J. Sports Med. 1993, 21, 238–242. [Google Scholar] [CrossRef]
- Curtis, K.A.; Tyner, T.M.; Zachary, L.; Lentell, G.; Brink, D.; Didyk, T.; Pacillas, B. Effect of a standard exercise protocol on shoulder pain in long-term wheelchair users. Spinal Cord 1999, 37, 421–429. [Google Scholar] [CrossRef]
- Rincon, D.M.; Ye, S.; Rodriguez, M.; Nasser, S. Electromyographic activities of shoulder muscles during forward and reverse manual wheelchair propulsion. In Proceedings of the Thirs LACCEI International Latin American and Caribbean Conference for Engineering and Technology, Catagena de Indias, Colombia, 8–10 June 2005. [Google Scholar]
- Salvi, F.J.; Hoffman, M.D.; Sabharwal, S.; Clifford, P.S. Physiologic comparison of forward and reverse wheelchair propulsion. Arch. Phys. Med. Rehabil. 1998, 79, 36–40. [Google Scholar] [CrossRef] [PubMed]
- Requejo, P.S.; Lee, S.E.; Mulroy, S.J.; Haubert, L.L.; Bontrager, E.L.; Gronley, J.K.; Perry, J. Shoulder muscular demand during lever-activated vs pushrim wheelchair propulsion in persons with spinal cord injury. J. Spinal Cord Med. 2008, 31, 568–577. [Google Scholar] [CrossRef] [PubMed]
- Haubert, L.L.; Mulroy, S.J.; Requejo, P.S.; Maneekobkunwong, S.; Gronley, J.K.; Rankin, J.W.; Hong, K. Effect of reverse manual wheelchair propulsion on shoulder kinematics, kinetics and muscular activity in persons with paraplegia. J. Spinal Cord Med. 2020, 43, 594–606. [Google Scholar] [CrossRef]
- Flemmer, C.L.; Flemmer, R.C. Reinventing the wheel for a manual wheelchair. Disabil. Rehabil. Assist. Technol. 2024, 19, 2166–2177. [Google Scholar] [CrossRef] [PubMed]
- Kitzinger, J. The methodology of focus groups: The importance of interaction between research participants. Sociol. Health Illn. 1994, 16, 103–121. [Google Scholar] [CrossRef]
- Bogner, A.; Littig, B.; Menz, W. Introduction: Expert Interviews—An Introduction to a New Methodological Debate. In Interviewing Experts; Palgrave Macmillan London: London, UK, 2009; pp. 1–13. [Google Scholar]
- Krueger, A.; Casey, A. Designing and Conducting Focus Group Interviews; University of Minnesota: St. Paul, MN, USA, 2002; Volume 18. [Google Scholar]
- Triolo, R.J.; Bailey, S.N.; Lombardo, L.M.; Miller, M.E.; Foglyano, K.; Audu, M.L. Effects of intramuscular trunk stimulation on manual wheelchair propulsion mechanics in individuals with spinal cord injury. Arch. Phys. Med. Rehabil. 2013, 94, 1997–2005. [Google Scholar] [CrossRef]
- Yang, Y.S.; Koontz, A.M.; Triolo, R.J.; Mercer, J.L.; Boninger, M.L. Surface electromyography activity of trunk muscles during wheelchair propulsion. Clin. Biomech. 2006, 21, 1032–1041. [Google Scholar] [CrossRef]
- August, R. Dynamics of Planetary Gear Trains; National Aeronautics and Space Administration, Scientific and Technical Information Branch: Washington, DC, USA, 1984; Volume 3793.
- Yang, J.; Dai, L. Survey of dynamics of planetary gear trains. Int. J. Mater. Struct. Integrity 2008, 1, 302–322. [Google Scholar] [CrossRef]
- Yao, W.S.; Lin, C.Y. Design of active continuous variable transmission control system with planetary gear. Electronics 2022, 11, 986. [Google Scholar] [CrossRef]
- Arva, J.; Fitzgerald, S.G.; Cooper, R.A.; Boninger, M.L. Mechanical efficiency and user power requirement with a pushrim activated power assisted wheelchair. Med. Eng. Phys. 2001, 23, 699–705. [Google Scholar] [CrossRef]
- van der Woude, L.H.V.; Veeger, H.E.J.; Boer, Y.D.; Rozendal, R.H. Physiological evaluation of a newly designed lever mechanism for wheelchairs. J. Med. Eng. Technol. 1993, 17, 232–240. [Google Scholar] [CrossRef] [PubMed]
- Engel, P.; Neikes, M.; Bennedik, K.; Hildebrandt, G.; Rode, F.W. Work physiological studies performed to optimate the lever propulsion and the seat position of a lever propelled wheelchair (author’s transl). Die Rehabil. 1976, 15, 217–228. [Google Scholar]
- Nawoczenski, D.A.; Ritter-Soronen, J.M.; Wilson, C.M.; Howe, B.A.; Ludewig, P.M. Clinical trial of exercise for shoulder pain in chronic spinal injury. Phys. Ther. 2006, 86, 1604–1618. [Google Scholar] [CrossRef] [PubMed]
- van der Woude, L.H.V.; den Otter, A.; van Brom, C.G. Mechanical advantage in wheelchair lever propulsion: Effect on physical strain and efficiency. J. Rehabil. Res. Dev. 1997, 34, 286–294. [Google Scholar] [PubMed]
- le Rütte, T.A.; Trigo, F.; Bessems, L.; van der Woude, L.H.V.; Vegter, R.J.K. A novel push–pull central-lever mechanism reduces peak forces and energy-cost compared to hand-rim wheelchair propulsion during a controlled lab-based experiment. J. Neuroeng. Rehabil. 2022, 19, 30. [Google Scholar] [CrossRef] [PubMed]
- Jahanian, O.; Gaglio, A.; Cho, C.C.; Muqeet, V.; Smith, R.; Morrow, M.M.B.; Hsiao-Wecksler, E.T.; Slavens, B.A. Hand-rim biomechanics during geared manual wheelchair propulsion over different ground conditions in individuals with spinal cord injury. J. Biomech. 2022, 142, 111235. [Google Scholar] [CrossRef]
- Hansen, R.K.; de Wit, J.L.J.; Samani, A.; Læssøe, U.; Figlewski, K.; Larsen, R.G. Wheelchair-modified ergometer rowing exercise in individuals with spinal cord injury: A feasibility, acceptability, and preliminary efficacy study. Spinal Cord Ser. Cases 2022, 8, 48. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Round of FGI | Neurological Level (ASIA Classification) |
|---|---|
| First round | T12 (A) |
| T12 (D) | |
| T12 (A) | |
| Second round | T12 (A) |
| C5 (C) | |
| T9 (D) | |
| C5 (D) | |
| C5 (D) | |
| C5 (D) |
| Age | Neurological Level (ASIA Classification) | Duration of Manual Wheelchair Use (Years) | Grip Strength (kg) | |
|---|---|---|---|---|
| 66 | C6 (D) | 4 | 9.25 (L) | 14.5 (R) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.; Kang, E.; Eun, S.-D.; Kang, D. Innovative Detachable Two-Way Wheelchair Propulsion System: Enhancing Mobility and Exercise for Spinal Cord Injury Users. Appl. Sci. 2025, 15, 4663. https://doi.org/10.3390/app15094663
Park J, Kang E, Eun S-D, Kang D. Innovative Detachable Two-Way Wheelchair Propulsion System: Enhancing Mobility and Exercise for Spinal Cord Injury Users. Applied Sciences. 2025; 15(9):4663. https://doi.org/10.3390/app15094663
Chicago/Turabian StylePark, Jiyoung, Eunchae Kang, Seon-Deok Eun, and Dongheon Kang. 2025. "Innovative Detachable Two-Way Wheelchair Propulsion System: Enhancing Mobility and Exercise for Spinal Cord Injury Users" Applied Sciences 15, no. 9: 4663. https://doi.org/10.3390/app15094663
APA StylePark, J., Kang, E., Eun, S.-D., & Kang, D. (2025). Innovative Detachable Two-Way Wheelchair Propulsion System: Enhancing Mobility and Exercise for Spinal Cord Injury Users. Applied Sciences, 15(9), 4663. https://doi.org/10.3390/app15094663