Feasibility of a Quasi-Static Approach in Assessing Side-Wind Hazards for Running Vehicles



Abstract
:Featured Application
Abstract
1. Introduction
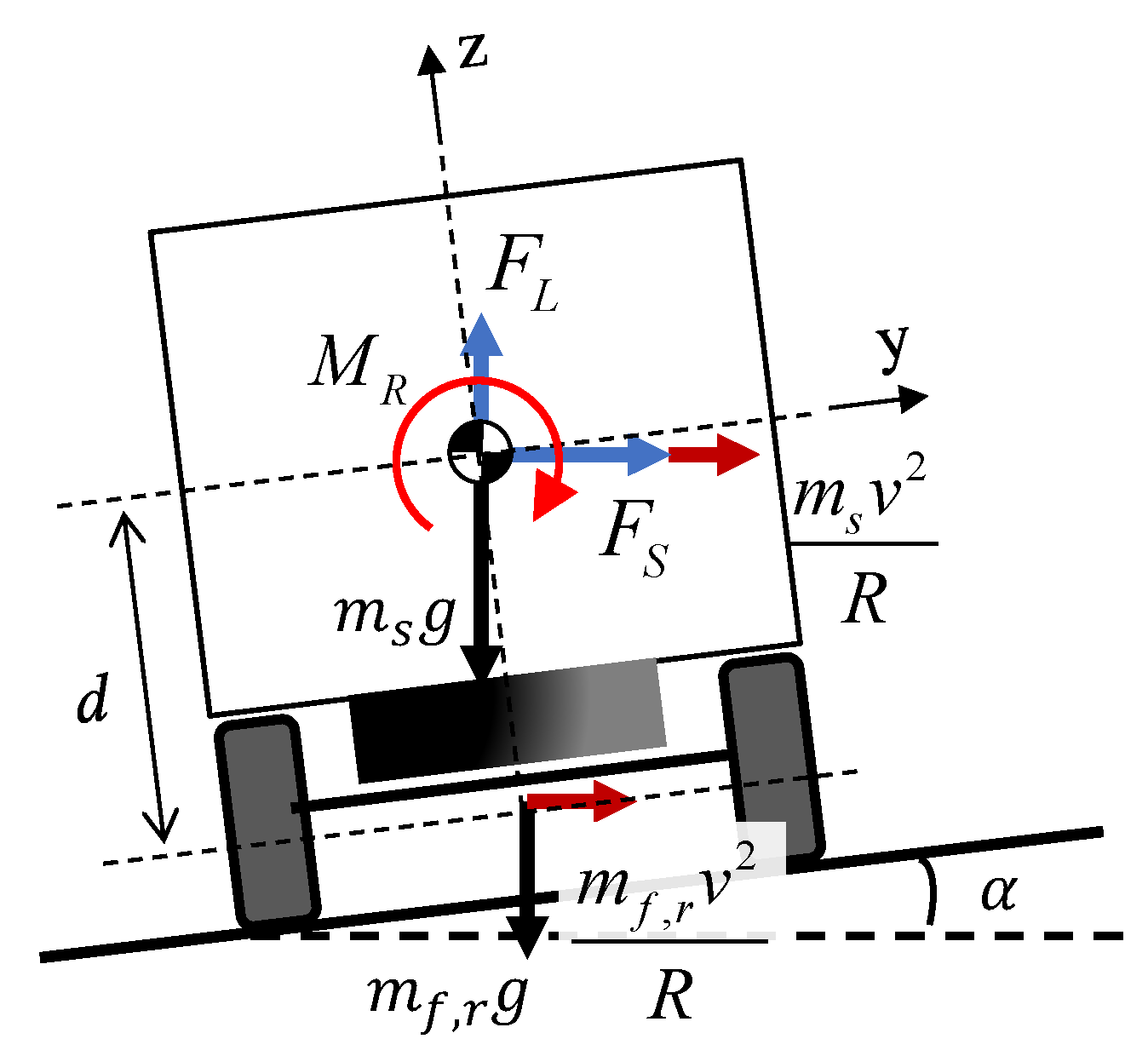
2. Quasi-Static Approach for the Evaluation of Tire Forces
2.1. Equations for Vehicles with Two Axles
2.2. Equations for Trailers with One Axle and One Hitch Point
2.3. Aerodynamic Forces and Moments
2.4. Effect of Road Conditions: Cant and Curvature
3. Feasibility of the Quasi-Static Approach Under a Uniform Wind
3.1. Modeling Options
3.2. Comparison of Tire Forces Under Various Wind Speeds
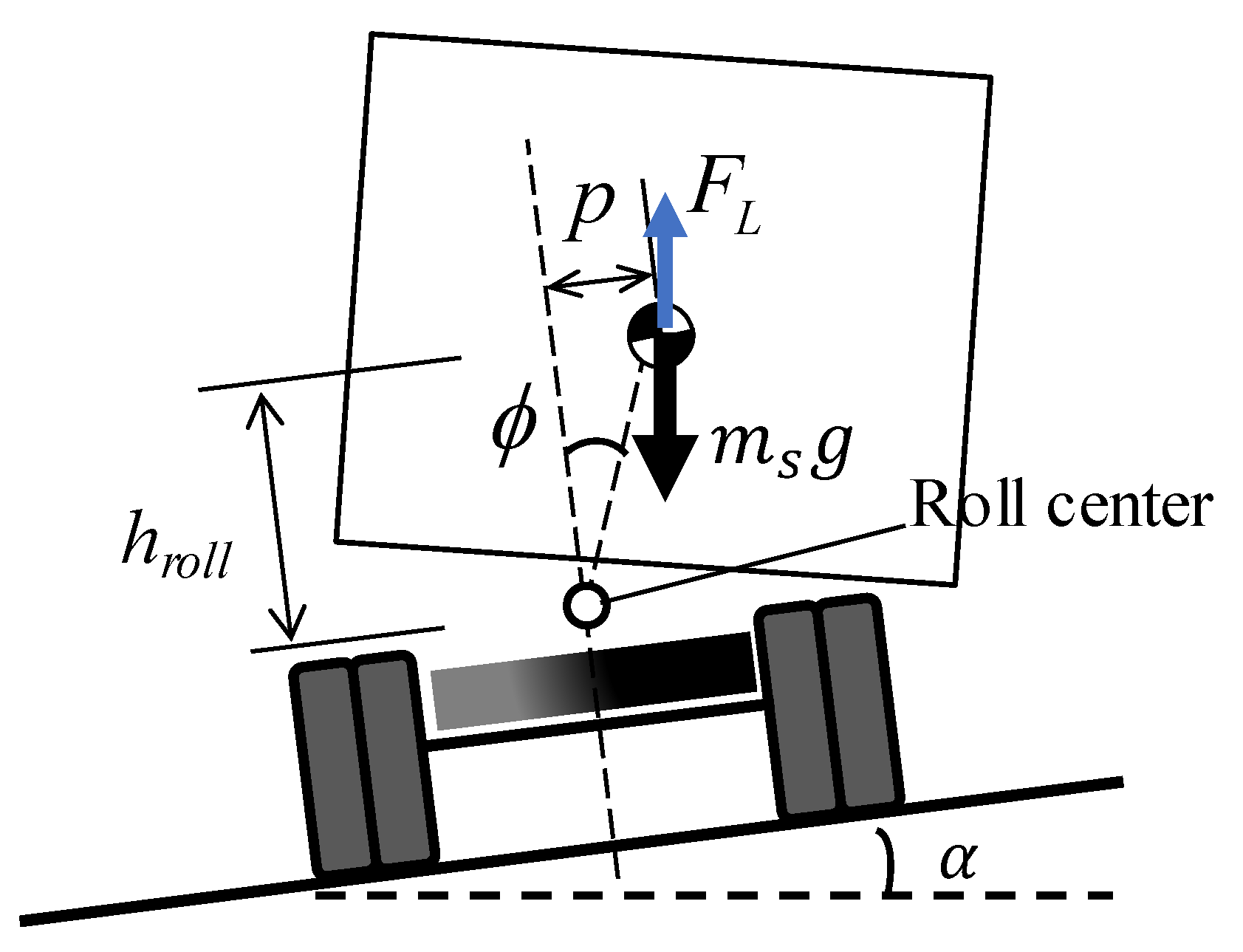
3.3. Enhanced Quasi-Static Approach Considering an Additional Rolling Moment
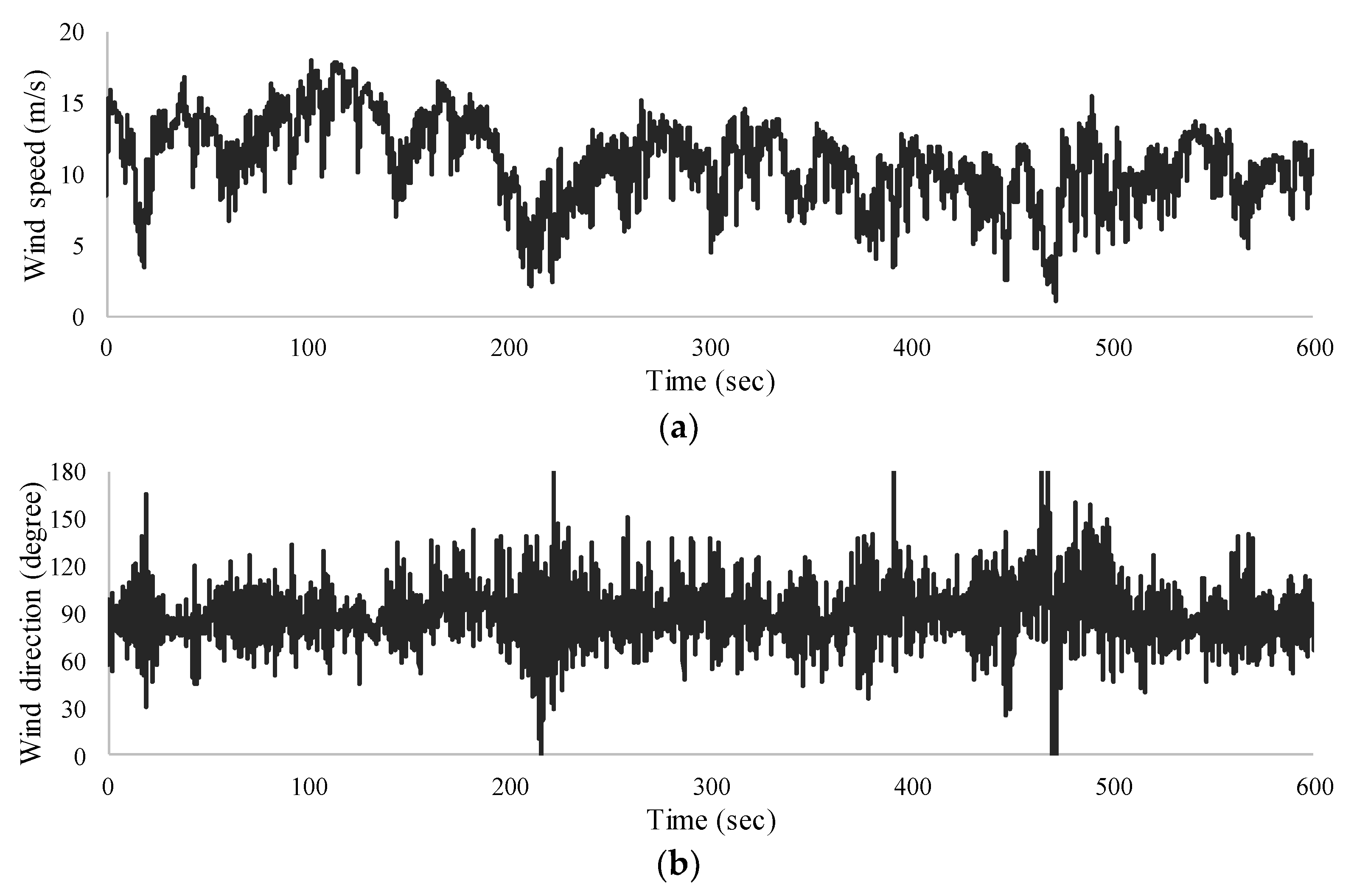
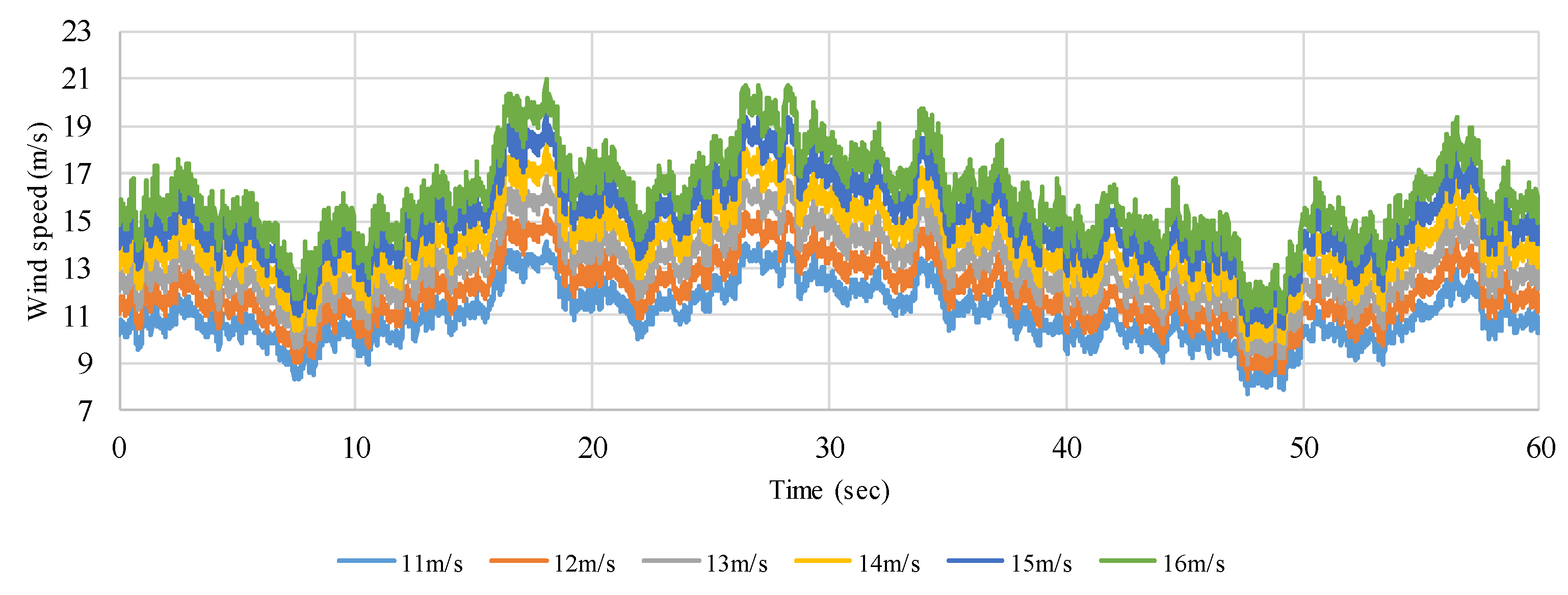
4. Feasibility of the Quasi-Static Approach Under Turbulent Winds
4.1. Enhanced Quasi-Static Approach Considering an Additional Rolling Moment
4.2. Comparison of Tire Forces Under Various Mean Wind Speeds
- Side-slip: when one of the axles reaches the friction limit
- Overturning: when one of the vertical reaction forces of the tires becomes zero
5. Conclusions
- The quasi-static approach for the van model provided vertical and lateral tire forces that were similar to those estimated using the dynamic approach for both turbulent and uniform winds. However, the quasi-static approach showed a discrepancy in vertical forces when the stiffness of the suspensions differed between the front and rear axles. According to the present case study, however, this discrepancy in the quasi-static approach would not prevent it from being considered a conservative estimation of vehicle safety.
- The quasi-static approach for the trailer model also created lateral tire forces similar to those created by the dynamic approach for both turbulent and uniform winds. However, the quasi-static approach returned a certain discrepancy in vertical forces by neglecting the additional rolling moment induced by a large lateral offset in the sprung mass. Accordingly, this study proposed an enhanced quasi-static approach for the trailer model, which added the rolling moment effect to the equilibrium equation. The vertical tire forces estimated by the enhanced quasi-static approach agreed well with those estimated by the dynamic analysis. However, additional information on both the roll stiffness and the position of the roll center are required for the enhanced quasi-static approach.
- The realistic modeling of a suspension system in the dynamic approach resulted in an attenuation of the high-frequency components and a phase lag in the time history of the vertical tire force when the vehicle was exposed to turbulent winds. However, the magnitude and overall variations in the reaction forces of the quasi-static approach were in good agreement with those in the dynamic approach.
- The critical wind speeds estimated by the quasi-static approach were almost identical to those used in the dynamic approach for the parameters of both side-slip and overturning accidents. Accordingly, the proposed quasi-static vehicle model is an efficient alternative to the dynamic model in estimating vehicle safety against strong side winds.
Author Contributions
Funding
Conflicts of Interest
References
- The Weather Network. SCARY: Vehicles Are Thrown around on Bridge in Japan during Typhoon Jebi. Available online: https://www.youtube.com/watch?v=9yLx3mOxeVQ (accessed on 4 September 2018).
- Kim, S.J.; Yoo, C.H.; Kim, H.K. Vulnerability assessment for the hazards of crosswinds when vehicles cross a bridge deck. J. Wind Eng. Ind. Aerodyn. 2016, 156, 62–71. [Google Scholar] [CrossRef] [Green Version]
- Baker, C.J. A simplified analysis of various types of wind-induced road vehicle accidents. J. Wind Eng. Ind. Aerodyn. 1986, 22, 69–85. [Google Scholar] [CrossRef]
- Xu, Y.L.; Guo, W.H. Dynamic analysis of coupled road vehicle and cable-stayed bridge systems under turbulent wind. Eng. Struct. 2003, 25, 473–486. [Google Scholar] [CrossRef]
- Chen, S.R.; Cai, C.S. Accident assessment of vehicles on long-span bridges in windy environments. J. Wind Eng. Ind. Aerodyn. 2004, 92, 991–1024. [Google Scholar] [CrossRef]
- Mechanical Simulation Corporation. TruckSim User Manual; Mechanical Simulation Corporation: Ann Arbor, MI, USA, 2016. [Google Scholar]
- Zhou, Y.; Chen, S. Vehicle ride comfort analysis with whole-body vibration on long-span bridges subjected to crosswind. J. Wind. Eng. Ind. Aerodyn. 2016, 155, 126–140. [Google Scholar] [CrossRef] [Green Version]
- Baker, C.J. A framework for the consideration of the effects of crosswinds on trains. J. Wind Eng. Ind. Aerodyn. 2013, 123, 130–142. [Google Scholar] [CrossRef]
- Baker, C.J. Risk analysis of pedestrian and vehicle safety in windy environments. J. Wind Eng. Ind. Aerodyn. 2015, 147, 283–290. [Google Scholar] [CrossRef]
- Batista, M.; Perkovič, M. A simple static analysis of moving road vehicle under crosswind. J. Wind Eng. Ind. Aerodyn. 2014, 128, 105–113. [Google Scholar] [CrossRef]
- Chen, S.R.; Chen, F. Simulation-based assessment of vehicle safety behavior under hazardous driving conditions. J. Transp. Eng. 2009, 136, 304–315. [Google Scholar] [CrossRef]
- Baker, C.J. Measures to control vehicle movement at exposed sites during windy periods. J. Wind Eng. Ind. Aerodyn. 1987, 25, 151–161. [Google Scholar] [CrossRef]
- Gillespie, T.D. Fundamentals of Vehicle Dynamics; Society of Automotive Engineers: Warrendale, PA, USA, 1992. [Google Scholar]
- Simiu, E.; Scanlan, R.H. Wind Effects on Structures: Fundamentals and Applications to Design, 3rd ed.; John Wiley & Sons Inc.: New York, NY, USA, 1996. [Google Scholar]
- Strømmen, E. Theory of Bridge Aerodynamics, 2nd ed.; Springer Science & Business Media: Berlin, Germany, 2010. [Google Scholar]
- Gustafsson, F. Slip-based tire-road friction estimation. Automatica 1997, 33, 1087–1099. [Google Scholar] [CrossRef]
- Grip, H.F.; Imsland, L.; Johansen, T.A.; Kalkkuhl, J.C.; Suissa, A. Vehicle sideslip estimation. IEEE Control Syst. Mag. 2009, 29, 36–52. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | a (m) | b (m) | c (m) | hc (m) | hT (m) | A (m2) | ms (ton) | mf (ton) | mr (ton) |
|---|---|---|---|---|---|---|---|---|---|
| Van | 1.35 | 1.75 | 1.63 | 0.71 | - | 6.8 | 2.10 | 0.15 | 0.53 |
| Trailer | 5.22 | 4.78 | 1.86 | 1.94 | 1.10 | 7.2 | 6.00 | - | 0.67 |
| Quasi-Static Approach | Enhanced Quasi-Static Approach | Dynamic Approach |
|---|---|---|
| 15.2 m/s | 14.1 m/s | 13.9 m/s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.-J.; Kim, H.-K. Feasibility of a Quasi-Static Approach in Assessing Side-Wind Hazards for Running Vehicles. Appl. Sci. 2019, 9, 3377. https://doi.org/10.3390/app9163377
Kim S-J, Kim H-K. Feasibility of a Quasi-Static Approach in Assessing Side-Wind Hazards for Running Vehicles. Applied Sciences. 2019; 9(16):3377. https://doi.org/10.3390/app9163377
Chicago/Turabian StyleKim, Se-Jin, and Ho-Kyung Kim. 2019. "Feasibility of a Quasi-Static Approach in Assessing Side-Wind Hazards for Running Vehicles" Applied Sciences 9, no. 16: 3377. https://doi.org/10.3390/app9163377