The Zerotrope, a Dynamic Holographic Display: Design and Implementation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials for Recording Holograms
2.2. Recording of Holograms H1 and H2
2.3. Determining the H2 Oblique Field of View
2.4. Generation of the 3D Content
2.5. Animation of Hologram H2
2.6. Generation of a Sharp Image
3. Results and Discussion
3.1. 3D Content and Holograms
3.2. Motion Blur
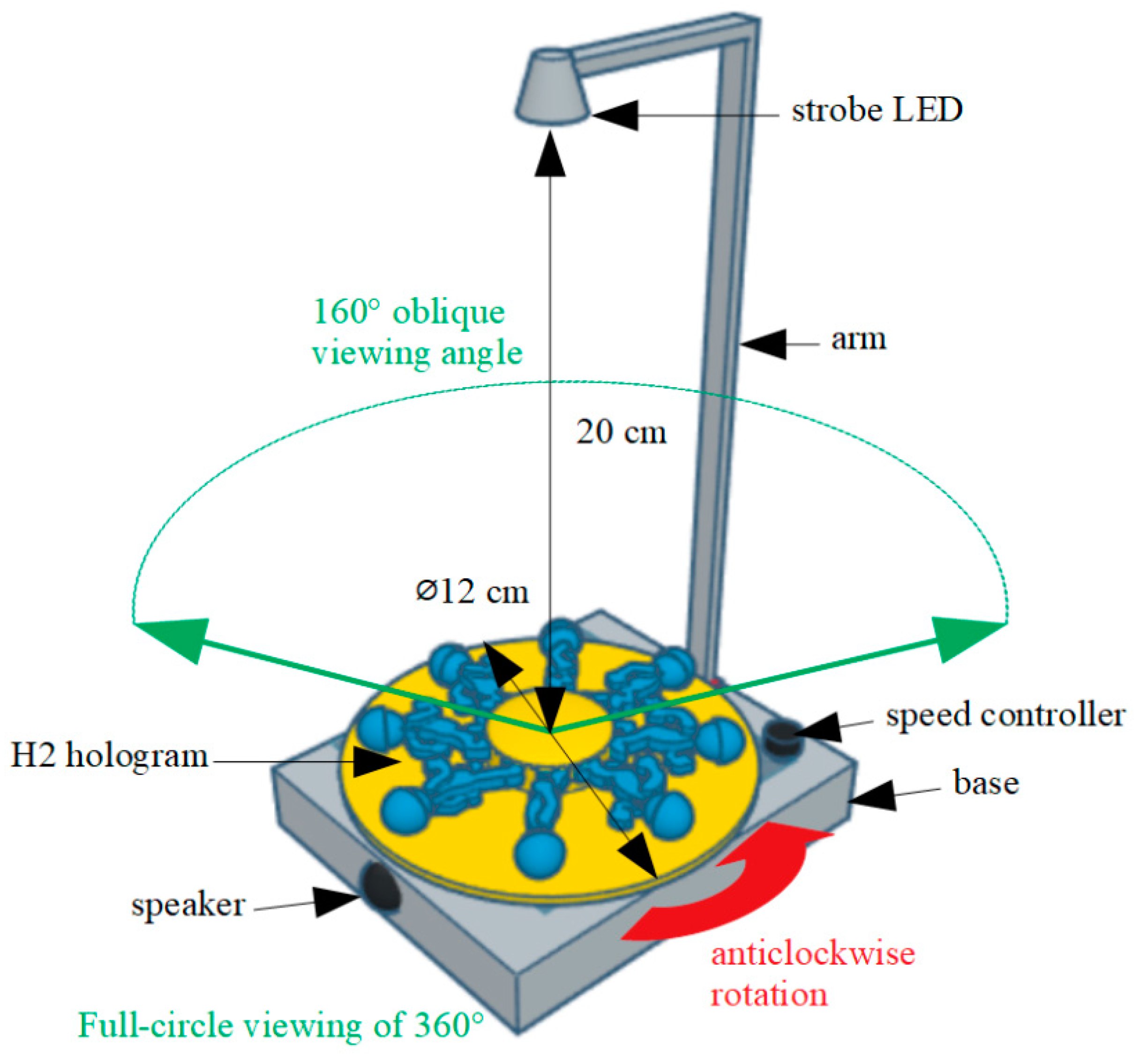
3.3. Zerotrope Assembly and Operation
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Geng, J. Three-dimensional display technologies. Adv. Opt. Photonics 2013, 5, 456–535. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lim, Y.; Hong, K.; Kim, H.; Kim, H.E.; Chang, E.Y.; Lee, S.; Kim, T.; Nam, J.; Choo, H.G.; Kim, J.; et al. 360-degree tabletop electronic holographic display. Opt. Express 2016, 24, 24999–25009. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sugie, T.; Akamatsu, T.; Nishitsuji, T.; Hirayama, R.; Masuda, N.; Nakayama, H.; Ichihashi, Y.; Shiraki, A.; Oikawa, M.; Takada, N.; et al. High-performance parallel computing for next-generation holographic imaging. Nat. Electron. 2018, 1, 254–259. [Google Scholar] [CrossRef]
- Ogle, K.N. Some aspects of stereoscopic depth perception. J. Opt. Soc. Am. 1967, 57, 1073–1081. [Google Scholar] [CrossRef] [PubMed]
- Lambooij, M.; Fortuin, M.; Heynderickx, I.; IJsselsteijn, W. Visual diskomfort and visual fatigue of stereoscopic displays: A review. J. Imaging Sci. Technol. 2009, 53, 30201–1–30201–14. [Google Scholar] [CrossRef]
- Gentet, P.; Joung, J.; Gentet, Y.; Hamacher, A.; Lee, S.H. Fantatrope, a moving hologram display: Design and implementation. Opt. Express 2019, 27, 11571–11584. [Google Scholar] [CrossRef] [PubMed]
- Horner, W.G. XI. On the properties of the Dædaleum, a new instrument of optical illusion. Philos. Mag. 1834, 4, 36–41. [Google Scholar] [CrossRef]
- Gentet, P.; Joung, J.; Gentet, Y.; Lee, S.H. Design and implementation of the Zerotrope: A novel dynamic holographic display. In Proceedings of the Optical Design Challenge 2019 International Society for Optics and Photonics, San Francisco, CA, USA, 27 February 2019. [Google Scholar] [CrossRef]
- Gentet, P.; Gentet, Y.; Lee, S.H. Ultimate 04 the new reference for ultra-realistic color holography. In Proceedings of the 2017 International Conference on Emerging Trends & Innovation in ICT (ICEI), Pune, India, 3 February 2017; pp. 162–166. [Google Scholar]
- Denisyuk, Y.N. On the reproduction of the optical properties of an object by the wave field of its scattered radiation. Opt. Spectrosc. Engl. Transl. 1965, 18, 152–157. [Google Scholar]
- Bjelkhagen, H.; Brotherton-Ratcliffe, D. Ultra-Realistic Imaging: Advanced Techniques in Analogue and Digital Colour Holography; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar] [CrossRef]
- Hartridge, H. Visual acuity and the resolving power of the eye. J. Physiol. 1922, 57, 52–67. [Google Scholar] [CrossRef] [PubMed] [Green Version]




© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gentet, P.; Joung, J.; Gentet, Y.; Kim, K.-J.; Lee, S.-H. The Zerotrope, a Dynamic Holographic Display: Design and Implementation. Appl. Sci. 2019, 9, 3378. https://doi.org/10.3390/app9163378
Gentet P, Joung J, Gentet Y, Kim K-J, Lee S-H. The Zerotrope, a Dynamic Holographic Display: Design and Implementation. Applied Sciences. 2019; 9(16):3378. https://doi.org/10.3390/app9163378
Chicago/Turabian StyleGentet, Philippe, Jinbeom Joung, Yves Gentet, Kwang-Jib Kim, and Seung-Hyun Lee. 2019. "The Zerotrope, a Dynamic Holographic Display: Design and Implementation" Applied Sciences 9, no. 16: 3378. https://doi.org/10.3390/app9163378
APA StyleGentet, P., Joung, J., Gentet, Y., Kim, K.-J., & Lee, S.-H. (2019). The Zerotrope, a Dynamic Holographic Display: Design and Implementation. Applied Sciences, 9(16), 3378. https://doi.org/10.3390/app9163378