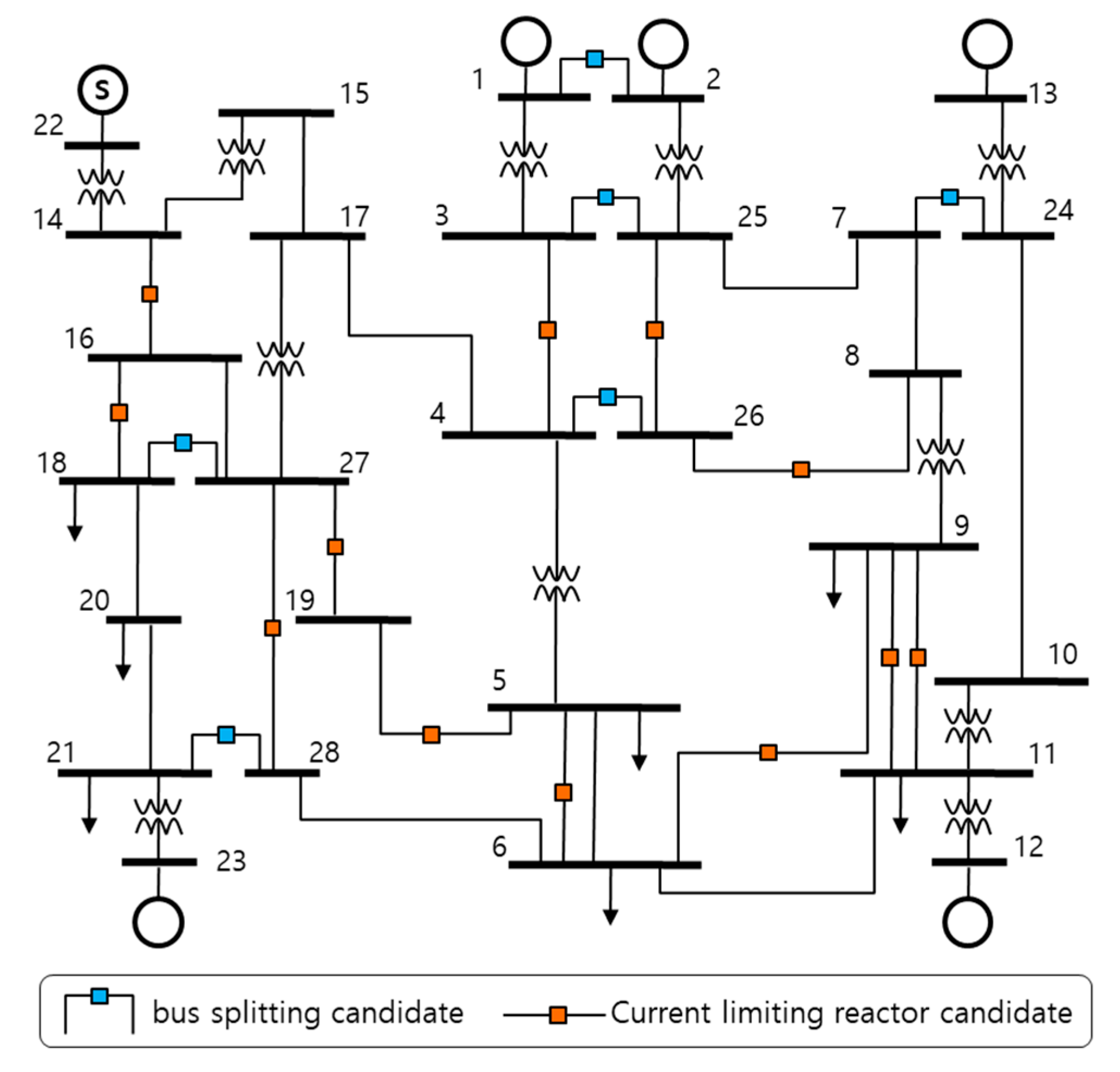
The proposed algorithm of this paper was tested on a modified 28-bus network as shown in
Figure 4. The said network was derived from the sample case network in [
27]. In
Figure 4, there are six bus pairs with bus splitting, and twelve bus pairs with CLR pre-defined candidate locations. The decomposition method was applied to this medium-sized test system to determine the correct locations for the countermeasures.
Table 2 shows the impedances and ratings of the respective generators. These values are inputs needed for the fault current calculations. The coefficients and constant term for each generator quadratic cost function are listed in
Table 3. Furthermore, the list of bus pairs with bus splitting and CLR countermeasures are shown in
Table 4.
At each candidate location, a reactance was inserted between two bus pairs to represent a countermeasure. These continuous reactances (Xk) are the main variables in the decision making as described in Equation (8a). In addition, the range of minimum to maximum values for the reactance representing bus splitting (XBS) is 0.0001 to 10.000 [pu], while the reactance for CLR (XCLR) is 0.0001 to 0.3000 [pu]. In this simulation, two cases with different number of FLCs were tested. Case 1 deals with a network with three FLCs and Case 2 has twenty-six FLCs.
4.1. Case 1
In this section, a simple case was applied to test the functionalities of the algorithm. Three FLCs were selected and added as constraints to the FFLC-OPF. These FLCs are included to limit their corresponding bus fault currents levels. In this simulation, the FLC is the assigned maximum CB breaking duty (
) for each bus. The set of FLCs for Case 1 is listed in
Table 5. Also, the acceptable limit of bus fault current violation (
) for the fuzzy membership function of each FLC is uniformly set as 20 [pu] for all three buses.
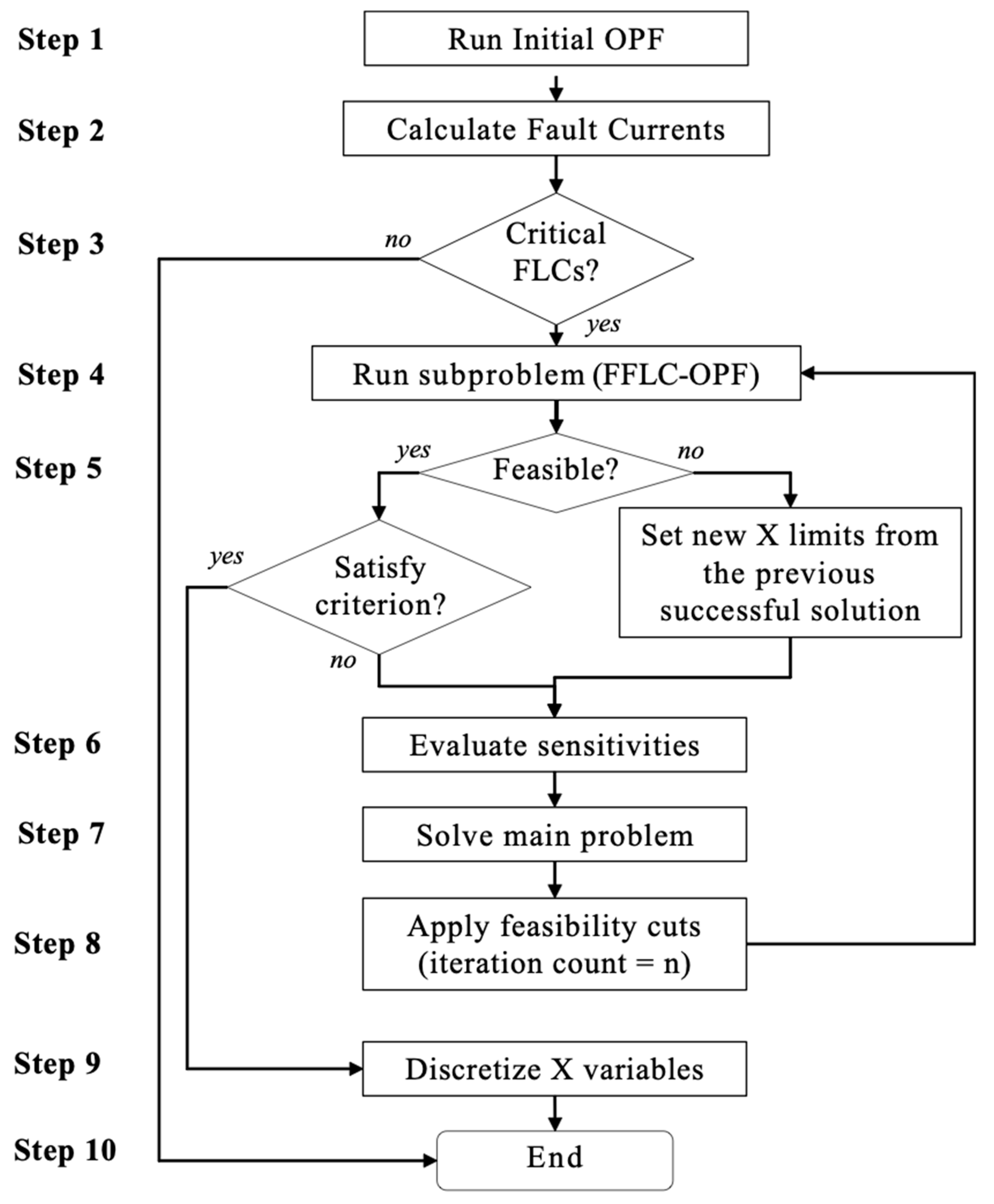
After executing the initial steps of the procedure in
Section 3.3, the three FLCs were identified to be critical. Although the FFLC-OPF subproblem was able to find a feasible solution the calculated bus fault current levels in all three buses still exceeded their corresponding FLCs as listed in
Table 6. The most excessive of the three fault current levels is at bus 1 which was 12.21% above its I
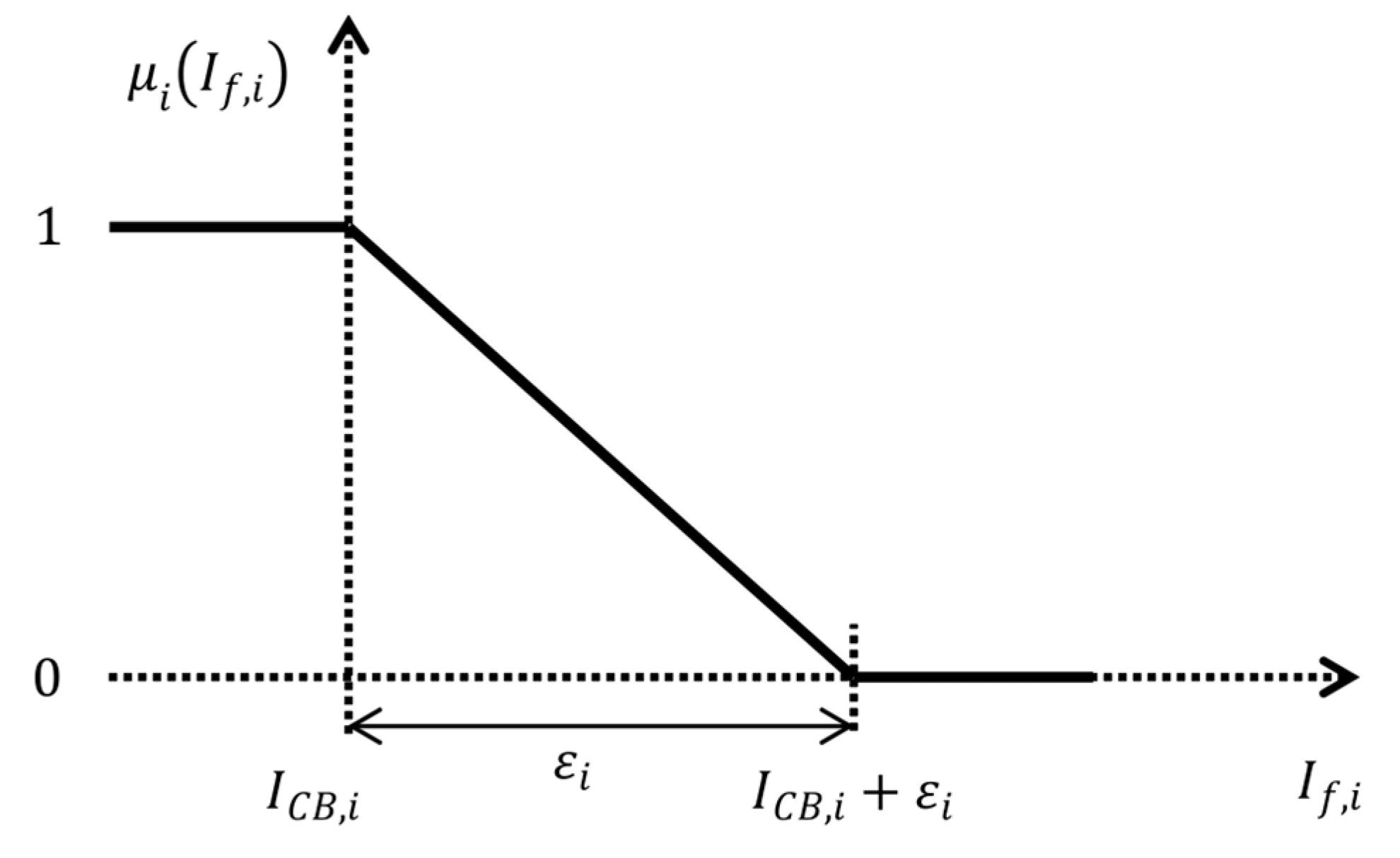
CB,max which is 50 [pu]. Consequently, bus 1 has the lowest value among the three membership functions with 0.695. Buses 26 and 28 have better membership function values of 0.738 and 0.835, respectively. As stated in Equation (3), a value of 1.0 indicates a fault current level that is less than or equal to the I
CB,max. Furthermore, since
z is the value of the lowest membership function among the given set of FLCs, the algorithm’s stopping criterion is set such that all FLCs are satisfied Equation (11).
To further reduce the fault current levels at the three critical buses, adequate countermeasures should be applied to the existing network. The algorithm proceeds to Step 6, wherein the sensitivities of each critical fault current level with respect to the countermeasures in
Table 4 are evaluated. The sensitivities in Equation (9b) was calculated using an increment of 0.01 [pu] for the
variables (
Table 7 shows the FLC sensitivities with respect to the incremental increase in the
variables particularly
variables. For this case, the localized nature of the FLCs at buses 1, 26, and 28 resulted to negligible sensitivity values with respect to
variables and were excluded in the
Table 7. The sensitivity matrix also reflects the impact of each
variables to the fault current levels at the FLC buses. Note that the negative value indicates a reduction in fault current level as modeled in Equation (9b). Hence, the FLCs at bus 1, 26, and 28 are more sensitive to the incremental increase in
,
and
, respectively for this particular iteration.
Afterwards, the algorithm proceeds to Step 7 where the main problem of minimizing the sum of all
variables is solved Equation (8a). The sensitivity matrix from the previous step is utilized as part of the formulation of constraints for this linear programming problem Equation (8b). The sensitivity matrix, which is essentially the rate of change in fault current levels, multiplied by the optimal minimum set of
variables must be less than or equal to the product of an acceleration coefficient (
2.50) and the difference of its circuit breaking duties and existing fault currents.
Table 8 shows the intermediate values of the
variables after running the main problem. The calculated fault current level after the first iteration is shown in the third column of
Table 6. Subsequently, the algorithm returned to Step 4 to run the FFLC-OPF to get a feasible operating point after the addition of the new
variables from the first iteration.
The final fault current levels are shown in the last column of
Table 6. Obviously, since all fault current levels are now below their
, the least membership function is now equivalent to 1.0 and has satisfied the algorithm’s stopping criterion. The next step is to discretize the
variables that were identified to cause the reduction of the fault current level of the network. Since the algorithm only took one complete iteration of the subproblem and main problem, the intermediate values are quite low. However, these intermediate values still indicate its effect on the identified FLCs that we aim to satisfy. In
Table 8,
variables with intermediate values are discretized and assigned with 10.0 [pu] for bus splitting. For comparison, the result applying the modified fault current constrained optimal power flow (MFCC-OPF) to the case with bus splitting candidates was shown in the last column of
Table 8. MFCC-OPF adopted a soft-discretization technique within the solution procedure, and it is only applicable to the decision making on bus splitting and line opening The result of MFCC-OPF was the same as that of the proposed method.
Figure 5 below shows the initial and I
CB,max fault current levels of each of the three buses with FLCs. Also shown in the graph are the effects on the fault current levels when countermeasures are applied on the network. From
Table 8, priority in bus splitting countermeasures can be ranked according to their corresponding intermediate values:
,
, and
. The
countermeasure corresponds to splitting buses 21–28 and resulted to a fault level reduction in bus 28. Applying two bus splitting countermeasures involved
and
which resulted to a fault reduction in buses 28 and 1. Lastly, three bus splitting countermeasures resolved all excessive fault current levels in all three FLC buses.
4.2. Case 2
For this case, the proposed algorithm is tested using the same number and types of countermeasures from
Table 4 but with more constraints than Case 1. Twenty-six FLCs are implemented in this simulation and the list of maximum CB breaking duties (I
CB,max) is shown in
Table 9. The goal of the proposed algorithm is to find a feasible solution that has the optimal type and allocation of countermeasure/s that would reduce the bus fault current levels within the FLCs which is the maximum CB breaking duties for each bus.
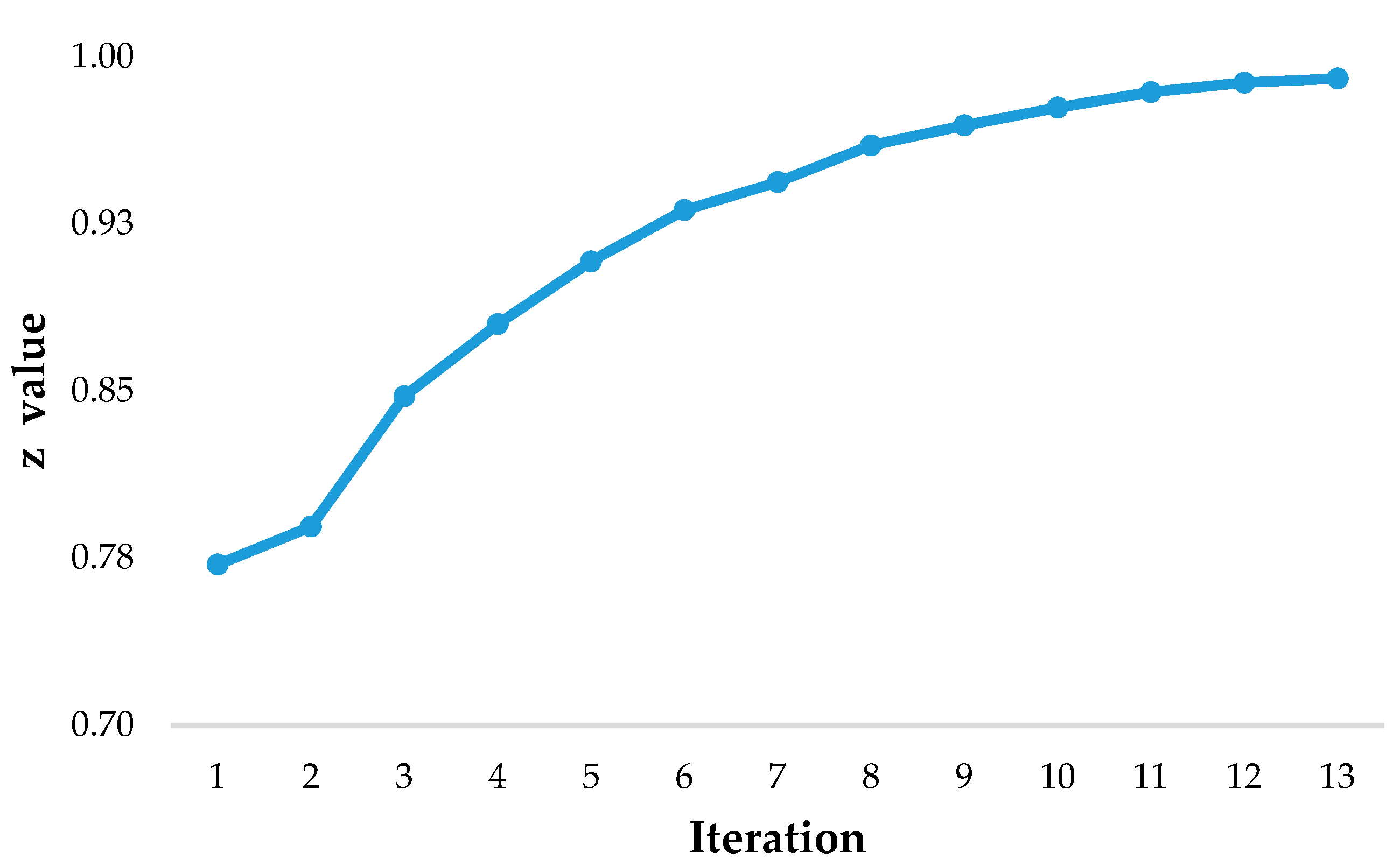
Similar with the previous case, all the initial fault current levels at the FLC buses exceed their corresponding I
CB,max. The worst of which is at bus 27 that initially exceeds its I
CB,max by 13.02% giving it the least membership function value of 0.772 as shown in
Figure 6. In this case, the FLC buses are scattered throughout the network, therefore each incremental increase in the
variables have varied effects on the fault current level calculations of each bus. To be able to reduce the fault current level in a wider scale, the sensitivity matrix must reflect which
reduces the most bus fault current levels. The size of the sensitivity matrix for this case is twenty-six FLCs by eighteen
variables. As discussed in
Section 3.2, there were
variables that were identified to be causing a rather large change in the generation cost and were causing infeasible solutions on the subproblem. In Case 2, it was identified that any increase in the settings of three
variables namely,
,
and
caused the divergence on the subproblem with twenty-six FLCs. The modified Equations (9a) and (10) were implemented so the sensitivity values of the FLCs from these
variables were set to zero.
Figure 6 shows the trajectory of the
z values on each run. After 13 iterations within 50.34 seconds, the stopping criterion was satisfied. Also, the trajectories of the
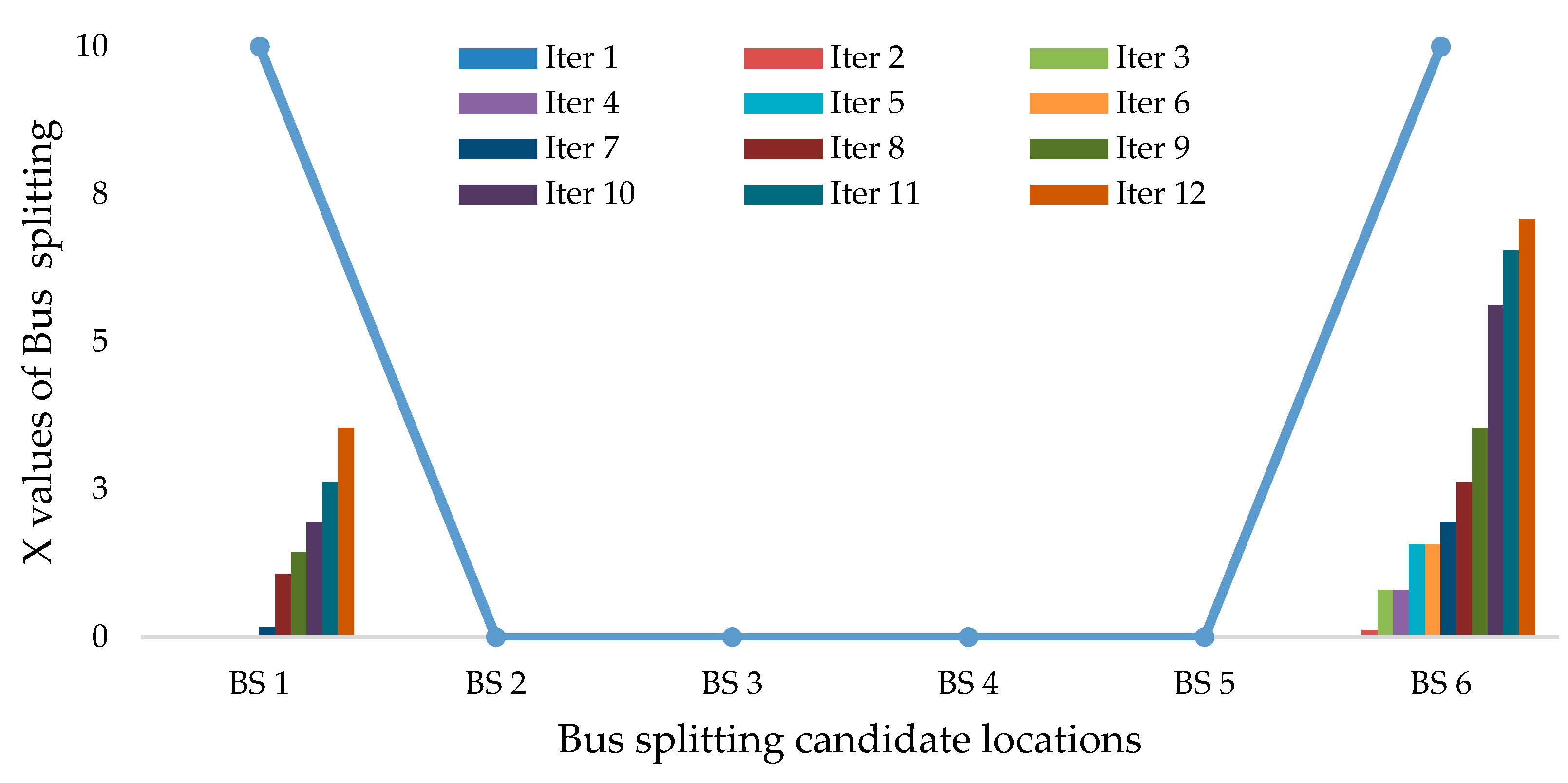
variables for all iterations are shown in
Figure 7 and
Figure 8. In
Figure 7, only
and
have intermediate values which means that the incremental increase in the reactances of these bus splitting pairs contributed on the reduction of the fault current levels on the system. Both
variables are considered for bus splitting while the other four bus pairs are kept integrated as indicated by the discrete points in
Figure 7.
During the simulation, there are also some instances wherein the subproblem diverges because of an
variable that reaches a reactance value after some time which results to an infeasible solution. Whenever this happens, Step 5 of the algorithm sets the previous
variables that yielded a feasible solution as the maximum limit before the algorithm proceeds to Step 6. In this way, the main problem algorithm can search for other feasible solutions for the decision variables. This instance is illustrated in
Figure 8 wherein
increased in value and resulted to divergence during the fourth iteration, and with
during the sixth iteration. Both
variables were limited to their previous
variable values during Step 5 of their respective iterations.
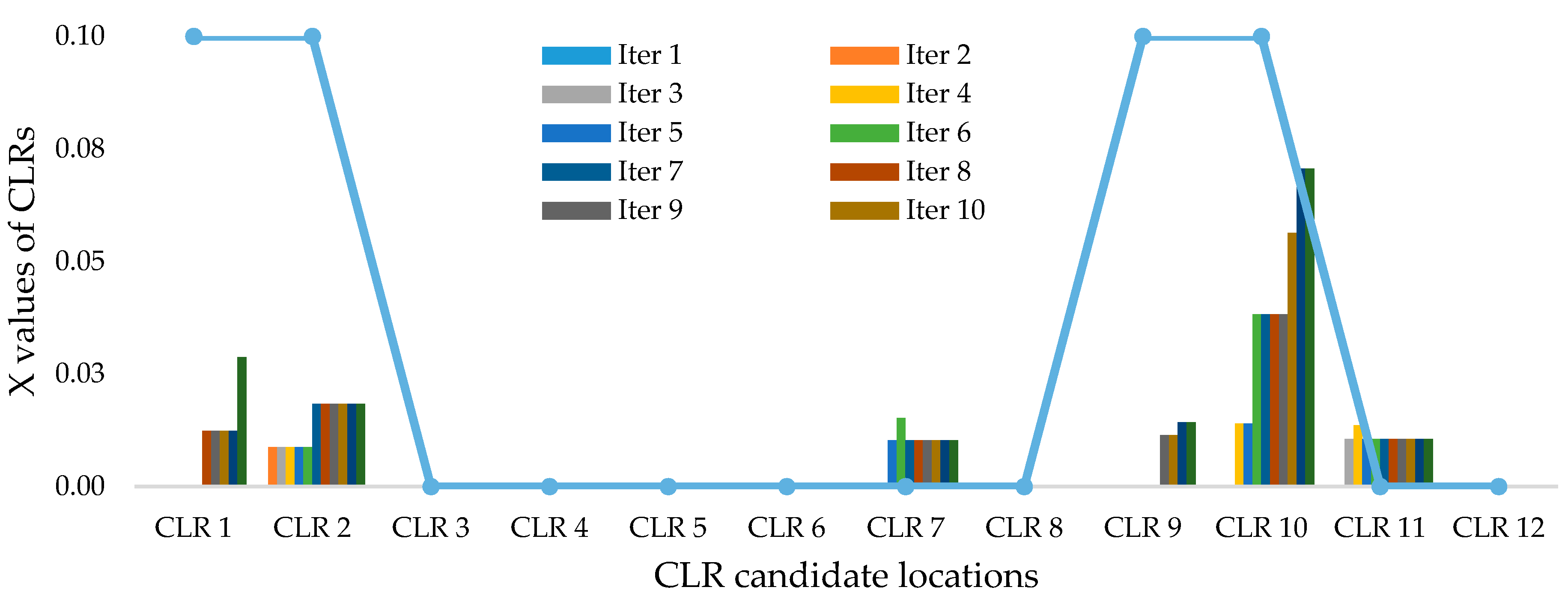
Similarly,
Figure 8 shows the intermediate values of the twelve
variables per iteration. The graph shows that the FLCs were sensitive to the incremental increase of only six
variables most especially with
that reached a value of 0.0707 [pu] on the 13th iteration. All
variables with intermediate values are considered as an additional 0.1 [pu] CLR countermeasures except for
and
variables since further increase in their values causes divergence on the subproblem. The discretization of
variables is illustrated in
Figure 8.
In summary, the list of
variables that were considered as bus splitting and CLR countermeasures for Case 2 is shown in
Table 10. The
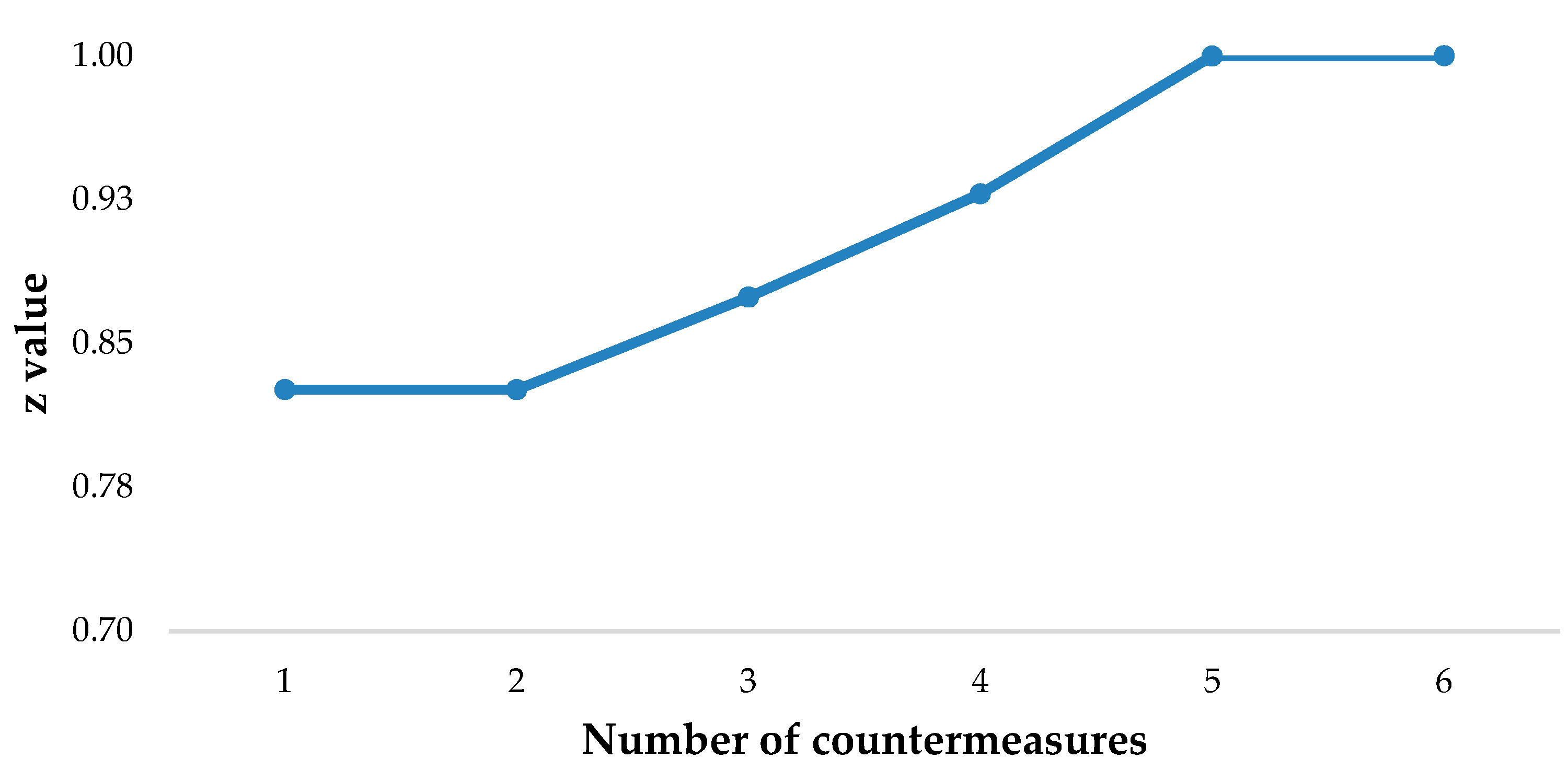
variables are also ranked based on their intermediate values and were applied on the network in the order as they were ranked. As seen in
Figure 9, there is a general improvement in the
z value as the number of applied countermeasures was increased. Also, the trend shows that applying one countermeasure and two countermeasures resulted to the same membership function. As discussed earlier, the
z value is the least membership function in the given set of FLCs and this reflect the FLC bus with the highest excessive fault current level violation. Applying one and two bus splitting countermeasure have different effects on the fault current levels of different buses. However, in this specific case, a bus split between buses 21–28 and an additional bus split in buses 1–2 did not affect the fault current level at bus 27 which remained at 38.48 [pu] yielding a membership function value of 0.8258 in both applications. A deeper look at the data revealed that the fault current level at bus 27 was significantly reduced after the application of CLR2 and CLR9, where additional 0.1 [pu] reactances were inserted between bus pairs 5–19 and 25–26, respectively. Almost a similar incident happened between applying five and six countermeasures as seen in
Figure 9.
Applying six countermeasures resulted to more reduction on the fault current levels at the FLC buses compared to only applying five countermeasures, except at bus 7 where six countermeasures only reduced the fault current level by 0.003 [pu]. This explains the very minimal improvement on the
z value between the application of five and six countermeasures. In addition, it is important to note that all of these countermeasures and their combinations resulted to feasible solutions to the FFLC-OPF. Ultimately, all twenty-six FLCs were satisfied after the application of the two bus splits (BS6 and BS1) and four current limiting reactors with 0.1 [pu] (CLR10, CLR1, CLR2, and CLR9). This is reflected with a
z value equivalent to 1 as shown in
Figure 9. Also, worth nothing that applying five countermeasures (BS6, BS1, CLR10, CLR1, and CLR2) is a good solution as well since it adequately satisfied the FLCs and has a
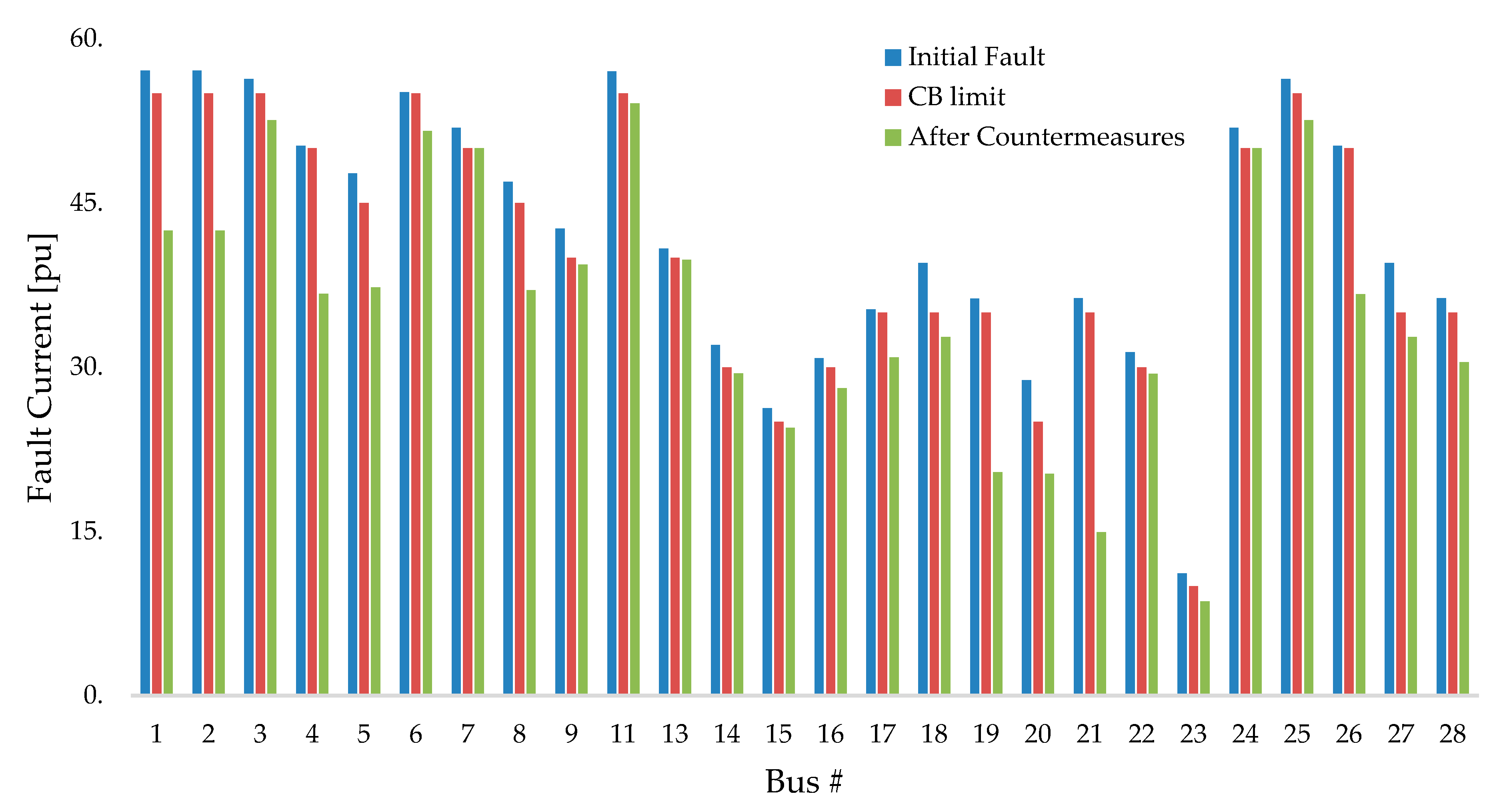
z value of 0.9999. Lastly, the initial fault current levels and the fault current levels after the application of the six countermeasures are illustrated in
Figure 10. Notice that all resulting fault current levels were reduced and are now within the maximum CB breaking duties. From an average initial fault current level excess of 5%, applying the six countermeasures resulted to a fault current level average of 12.85% reduction below CB limits in the twenty-six FLC buses.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}