Whole-Body Motion Planning for a Six-Legged Robot Walking on Rugged Terrain


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
2.1. Stability Analysis of Six-Legged Robotic Walking
2.2. Support Planning
2.2.1. Torso Horizontal Position and Height
2.2.2. Torso Posture
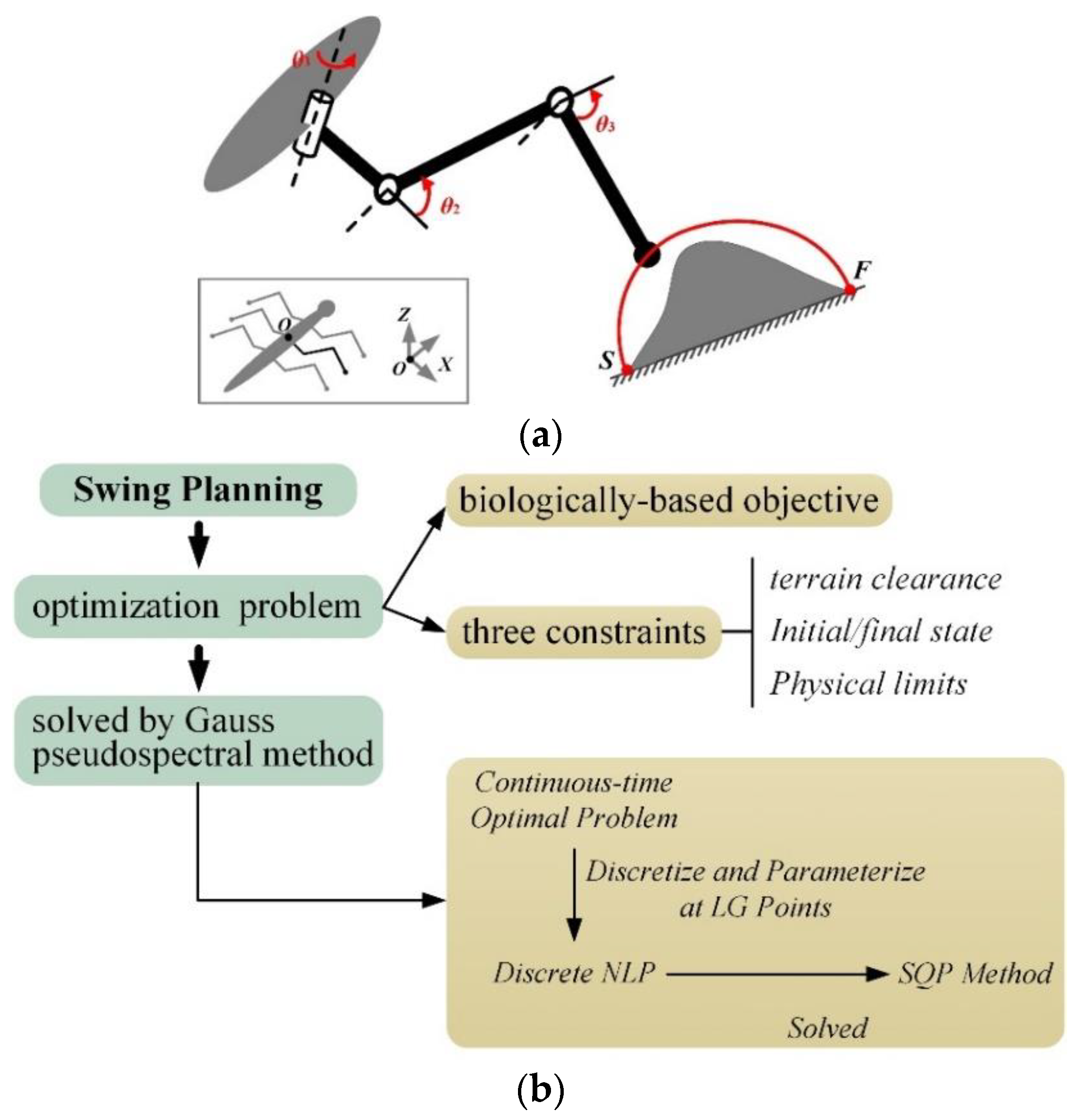
2.3. Swing Planning
3. Results
3.1. Simulation
3.2. Experimental Study
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Floreano, D.; Ijspeert, A.J.; Schaal, S. Robotics and Neuroscience. Curr. Biol. 2014, 24, R910–R920. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jackson, A. Neuroscience: Brain-controlled robot grabs attention. Nature 2012, 485, 317–318. [Google Scholar] [CrossRef] [PubMed]
- Andrada, E.; Mämpel, J.; Schmidt, A.; Fischer, M.; Karguth, A.; Witte, H. From biomechanics of rats’ inclined locomotion to a climbing robot. Int. J. Des. Nat. Ecodynamics 2013, 8, 192–212. [Google Scholar] [CrossRef] [Green Version]
- Tugcu, M.; Wang, X.; Hunter, J.E.; Phillips, J.; Noelle, D.; Wilkes, D.M. A computational Neuroscience model of working memory with application to robot perceptual learning. In Proceedings of the Third IASTED International Conference on Computational Intelligence (CI), Banff, AB, Canada, 2–4 July 2007. [Google Scholar]
- Zhang, H.; Liu, Y.; Zhao, J.; Chen, J.; Yan, J. Development of a bionic hexapod robot for walking on unstructured terrain. J. Bionic Eng. 2014, 11, 176–187. [Google Scholar] [CrossRef]
- Stelzer, A.; Hirschmüller, H.; Görner, M. Stereo-vision-based navigation of a six-legged walking robot in unknown rough terrain. Int. J. Robot. Res. 2012, 31, 381–402. [Google Scholar] [CrossRef] [Green Version]
- Belter, D.; Łabęcki, P.; Skrzypczyński, P. Adaptive Motion Planning for Autonomous Rough Terrain Traversal with a Walking Robot. J. Field Robot. 2016, 33, 337–370. [Google Scholar] [CrossRef]
- Saranli, U.; Buehler, M.; Koditschek, D.E. RHex: A Simple and Highly Mobile Hexapod Robot. Int. J. Robot. Res. 2001, 20, 616–631. [Google Scholar] [CrossRef] [Green Version]
- Altendorfer, R.; Moore, N.; Komsuoglu, H.; Buehler, M.; Brown Jr, H.B.; McMordie, D.; Saranli, U.; Full, R.; Koditschek, D.E. RHex: A biologically inspired hexapod runner. Auton. Robots 2001, 11, 207–213. [Google Scholar] [CrossRef] [Green Version]
- Görner, M. The DLR Crawler: Evaluation of gaits and control of an actively compliant six-legged walking robot. Ind. Robot Int. J. 2009, 36, 344–351. [Google Scholar] [CrossRef]
- Bartsch, S.; Birnschein, T.; Römmermann, M.; Hilljegerdes, J.; Kühn, D.; Kirchner, F. Development of the six-legged walking and climbing robot SpaceClimber. J. Field Robot. 2012, 29, 506–532. [Google Scholar] [CrossRef]
- Albiez, J.C.; Luksch, T.; Berns, K.; Dillmann, R. Reactive reflex-based control for a four-legged walking machine. Robot. Auton. Syst. 2003, 44, 181–189. [Google Scholar] [CrossRef]
- Lee, J.-K.; Song, S.-M. Path planning and gait of walking machine in an obstacle-strewn environment. J. Robot. Syst. 1991, 8, 801–827. [Google Scholar] [CrossRef]
- Bai, S.; Low, K.H. Terrain evaluation and its application to path planning for walking machines. Adv. Robot. 2001, 15, 729–748. [Google Scholar] [CrossRef] [Green Version]
- Wooden, D.; Malchano, M.; Blankespoor, K.; Howardy, A.; Rizzi, A.A.; Raibert, M. Autonomous navigation for BigDog. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, Alaska, 4–8 May 2010; pp. 4736–4741. [Google Scholar]
- Kalakrishnan, M.; Buchli, J.; Pastor, P.; Mistry, M.; Schaal, S. Fast, robust quadruped locomotion over challenging terrain. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, Alaska, 4–8 May 2010; pp. 2665–2670. [Google Scholar]
- Kalakrishnan, M.; Buchli, J.; Pastor, P.; Mistry, M.; Schaal, S. Learning, planning, and control for quadruped locomotion over challenging terrain. Int. J. Robot. Res. 2010, 30, 236–258. [Google Scholar] [CrossRef]
- Vernaza, P.; Likhachev, M.; Bhattacharya, S.; Chitta, S.; Kushleyev, A.; Lee, D.D. Search-based planning for a legged robot over rough terrain. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 2380–2387. [Google Scholar]
- McGhee, R.B.; Frank, A.A. On the stability properties of quadruped creeping gaits. Math. Biosci. 1968, 3, 331–351. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, Y.; Zhou, M.; Wu, J. Energy-Optimal Collision-Free Motion Planning for Multiaxis Motion Systems: An Alternating Quadratic Programming Approach. IEEE Trans. Autom. Sci. Eng. 2019, 16, 327–338. [Google Scholar] [CrossRef]
- Chen, J.; Liu, Y.; Zhao, J.; Zhang, H.; Jin, H. Biomimetic Design and Optimal Swing of a Hexapod Robot Leg. J. Bionic Eng. 2014, 11, 26–35. [Google Scholar] [CrossRef]
- Bjelonic, M.; Kottege, N.; Homberger, T.; Borges, P.; Beckerle, P.; Chli, M. Weaver: Hexapod robot for autonomous navigation on unstructured terrain. J. Field Robot. 2018, 35, 1063–1079. [Google Scholar] [CrossRef]
- Sun, Q.; Gao, F.; Chen, X. Towards dynamic alternating tripod trotting of a pony-sized hexapod robot for disaster rescuing based on multi-modal impedance control. Robotica 2018, 36, 1048–1076. [Google Scholar] [CrossRef]
- de Santos, P.G.; Garcia, E.; Ponticelli, R.; Armada, M. Minimizing Energy Consumption in Hexapod Robots. Adv. Robot. 2009, 23, 681–704. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Liang, Z.; Zhu, Y.; Zhao, J.J.J.o.B.E. Improving Kinematic Flexibility and Walking Performance of a Six-legged Robot by Rationally Designing Leg Morphology. J. Bionic Eng. 2019, 16, 608–620. [Google Scholar] [CrossRef]
- Li, S.; Zhou, M.; Luo, X. Modified Primal-Dual Neural Networks for Motion Control of Redundant Manipulators With Dynamic Rejection of Harmonic Noises. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 4791–4801. [Google Scholar] [CrossRef] [PubMed]
- Sun, P.; Yu, Z. Tracking control for a cushion robot based on fuzzy path planning with safe angular velocity. IEEE/CAA J. Autom. Sin. 2017, 4, 610–619. [Google Scholar] [CrossRef]
- Nakhaeinia, D.; Payeur, P.; Laganiere, R. A Mode-Switching Motion Control System for Reactive Interaction and Surface Following Using Industrial Robots. IEEE/CAA J. Autom. Sin. 2018, 5, 670–682. [Google Scholar] [CrossRef]










© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Gao, F.; Huang, C.; Zhao, J. Whole-Body Motion Planning for a Six-Legged Robot Walking on Rugged Terrain. Appl. Sci. 2019, 9, 5284. https://doi.org/10.3390/app9245284
Chen J, Gao F, Huang C, Zhao J. Whole-Body Motion Planning for a Six-Legged Robot Walking on Rugged Terrain. Applied Sciences. 2019; 9(24):5284. https://doi.org/10.3390/app9245284
Chicago/Turabian StyleChen, Jie, Fan Gao, Chao Huang, and Jie Zhao. 2019. "Whole-Body Motion Planning for a Six-Legged Robot Walking on Rugged Terrain" Applied Sciences 9, no. 24: 5284. https://doi.org/10.3390/app9245284
APA StyleChen, J., Gao, F., Huang, C., & Zhao, J. (2019). Whole-Body Motion Planning for a Six-Legged Robot Walking on Rugged Terrain. Applied Sciences, 9(24), 5284. https://doi.org/10.3390/app9245284