Abstract
Research on unmanned surface vessels (USVs) has evolved significantly in recent decades. In particular, intelligent navigation technology has progressed from theoretical concepts to practical applications. As USV research in ocean engineering advances, there is an increasing demand for enhanced performance in intelligent guidance strategy and path-following control systems. This manuscript proposes future development directions for USVs by providing an overview of relevant standards for the intelligence level of these vessels and describing the current status of USV engineering practices. Based on practical ocean engineering requirements, safety considerations, and energy efficiency demands, this paper summarizes the current research status, future research challenges, and potential solutions for USV intelligent guidance and path-following control algorithms from the perspective of large ship intelligence. This manuscript provides a valuable reference for academic researchers and practitioners aiming to identify and position future development directions.
1. Introduction
In recent years, the development of Unmanned Surface Vehicle (USV) technology has achieved significant progress in ocean engineering [,]. USVs, characterized by their efficiency, flexibility, and safety, are increasingly used in fields such as military operations, environmental monitoring, and marine science. The core of USV technology lies in its intelligent navigation capabilities, which encompass intelligent guidance and path-following control.
Intelligent guidance technology integrates various types of sensor information and advanced algorithms to achieve real-time positioning, path planning, and dynamic obstacle avoidance for USVs [,]. Common intelligent guidance algorithms include Line-of-Sight (LOS) guidance, Dynamic Virtual Ship (DVS) guidance principles, and Artificial Potential Field (APF) methods. These algorithms generate reference paths and adjust the USV’s heading and speed in real time to cope with complex and dynamic marine environments. For instance, the LOS method is widely used in stable navigation tasks due to its simplicity and effectiveness, while the APF method achieves smooth and safe path planning by setting attractive and repulsive points [].
Path-following control focuses on the real-time control of USVs during navigation tasks, ensuring they strictly follow predetermined paths. To address the complexity and variability of marine environments, path-following control often incorporates modern control theories such as robust control, adaptive control, and predictive control [,]. In recent years, intelligent control methods based on deep learning and reinforcement learning have also been applied to USV path following, significantly enhancing the responsiveness and accuracy of control systems []. These methods learn and adapt to environmental changes, making them more effective in dynamic and uncertain marine environments.
While high levels of automation have been achieved for small intelligent vessels and certain specialized marine tasks, research on intelligent control for large transport vessels is still in its infancy due to their large inertia, long delays, and significant responses to environmental disturbances. This paper aims to systematically review the latest research advances in intelligent navigation technology for USVs, focusing on key technologies and methods in intelligent guidance and path-following control and analyzing current challenges and future development directions [,].
The structure of this paper is outlined as follows. Section 2 analyzes the development trends of intelligent guidance and control based on the Web of Science (WOS) literature database. Section 3 introduces the key technologies for the development of USVs by examining the current state of USV applications in the marine industry. This section focuses on analyzing the current state and future trends of USV path-following control and intelligent guidance technologies from the perspective of engineering requirements. Section 4 summarizes the main findings and conclusions of this paper. Through an in-depth study and analysis of the latest advancements in intelligent navigation technology, this paper aims to provide theoretical support and technical references for the development of autonomous guidance and control of unmanned underwater vehicles, thereby promoting their broader application and further enhancement in real-world scenarios.
2. Research Progress on Intelligent Navigation Technology Based on the Literature Review
To analyze the current status and trends in research on intelligent guidance and path-following control for USVs, this study conducted a literature search in the WOS database covering the past fifteen years. Figure 1 was generated using CiteSpace and Web of Science (WOS) database by extracting the following keywords: guidance, path-following control, and USV. Keyword analysis and visualization tools were utilized to identify research hot spots and trends. Figure 1 presents a keyword cluster map for USV path-following control, highlighting the key areas of focus and the intersection of various technical approaches within the field.
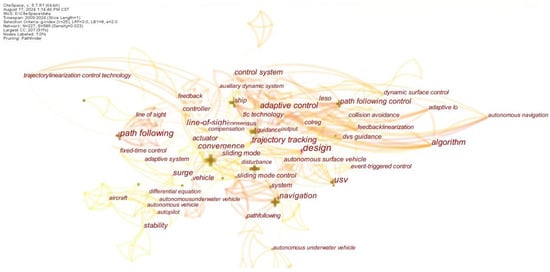
Figure 1.
The research trends in intelligent guidance and path-following control of USV.
From the analysis presented in Figure 1, it is evident that research hot spots are concentrated in areas such as “path-following control”, “adaptive control”, and “trajectory tracking design”. Prominent keywords in the map, such as “sliding mode control”, “dynamic surface control”, and “control system”, reflect the efforts of researchers to develop control algorithms that meet the demands of USVs operating in complex marine environments. These algorithms are not only required to address challenges related to nonlinearity and uncertainty but also to exhibit high robustness and adaptability in practical engineering applications.
Moreover, the map reveals significant associations between keywords like “navigation”, “algorithm”, and “path following”, indicating the critical role of guidance algorithms in the intelligent navigation of USVs. As USVs become more widely used in ocean engineering, researchers are continually refining these algorithms to handle increasingly complex navigation tasks. These refinements often focus on enhancing the real-time path-planning and obstacle avoidance capabilities of USVs in dynamic marine environments, ensuring accurate and safe course keeping under uncertain conditions.
Overall, the current research trends indicate that engineering demands are driving the ongoing development of control and guidance algorithms. These algorithms must not only manage the nonlinearities and uncertainties inherent in USV operations but also demonstrate efficiency and reliability across various real-world applications, thereby supporting autonomous navigation in complex marine environments.
3. Intelligent Navigation Guidance and Control for USVs
3.1. The Development of USVs in Ocean Engineering
The concept of a maritime autonomous surface ship (MASS) was officially introduced by the Maritime Safety Committee (MSC) of the International Maritime Organization (IMO) in 2017 and was further categorized into four levels the following year, as shown in Table 1 []. The IMO’s categorization of MASSs primarily focuses on whether personnel are onboard and the vessel’s mode of operation, aiming to differentiate navigation and personnel safety issues among different levels of MASS []. The research focus has been on how the current regulatory framework adapts to MASSs, with comparatively less emphasis on the vessel’s own level of intelligence [,,,,,].

Table 1.
The intelligence level of MASSs according to the IMO.
To further evaluate the intelligence level of MASSs, reference can be made to the Society of Automotive Engineers, which categorizes the levels of unmanned vehicles into six levels []. In the “White Paper on the Development of Intelligent Ships-Ocean-going Ships”, MASS is categorized into five levels, from L1 to L5 []. These levels are defined based on the following four dimensions: system control, operational monitoring, failure response, and regulatory location (Table 2). The white paper primarily approaches the intelligence level of vessels from the perspective of their own automation, focusing on the digitization level and self-learning capabilities of intelligent vessels [,,].
Table 2.
The intelligence level of MASSs outline in the white paper.
Currently, the intelligence level of commercial ships engaged in ocean transportation is primarily at Level L1, where systems provide decision-making suggestions while humans make decisions and operate. Several European countries, Japan, South Korea, and China have jointly conducted research and development on unmanned remote-controlled vessels. The development of small intelligent vessels (unmanned boats, unmanned surface ships, shore-based remote-controlled surface vessels, etc.), some ships engaged in specialized maritime tasks, and maritime testing vessels by research institutes is progressing rapidly [,]. These vessels can achieve Level L4 intelligence. There is both a theoretical and experimental engineering basis both domestically and internationally, and related products have been commercialized. However, for large transport vessels, due to their significant inertia, long time delays, and pronounced responses to environmental disturbances, related intelligence research is still in its infancy.
The development of USVs has become a significant focus in the maritime industry, leading to substantial research achievements in the field []. Research projects on USVs have been initiated by 48 countries, and it is anticipated that USVs will be operational at sea by 2030 in some developed countries []. In 2012, the European Union initiated the MUNIN project, focusing on unmanned bulk carriers, and conducted extensive research on the navigation of large intelligent vessels []. In 2017, the tugboat Svitzer Hermod, built by a Turkish shipyard, became the world’s first remotely operated commercial ship in Denmark []. The European Union’s Yara Birkeland project officially launched the Yara Birkeland container ship for commercial operation in November 2021. It became the world’s first commercially operational USV, with the expectation of achieving Level R2 remote-controlled unmanned operations by 2030, as outlined in Table 1 [].
The Russian autonomous navigation technology trial project completed a navigation demonstration of the Pola Anfisa freighter in the Azov Sea and the Black Sea in August and September 2021 []. The Japan Post project, supported by the MEGURI 2040 consortium, successfully navigated the Sunflower Shiretoko large vehicle–passenger ferry for 18 h and 750 km in the waters of Hokkaido in February 2022 []. In 2022, the large liquefied natural gas carrier Prism Courage of South Korea completed long-distance intelligent navigation experiments []. In the same year, the unmanned electric ship The Mayflower autonomously sailed across the Atlantic Ocean from the UK to the United States on June 30, becoming the world’s first fully autonomous USV []. The intelligent unmanned system mother ship Zhu Hai Yun was successfully launched, capable of autonomous navigation and decision making and realizing autonomous navigation and remote control [,].
3.2. Pivotal USV Technologies
In modern maritime operations, the integration of advanced technologies is paramount for the enhancement of vessel efficiency, safety, and autonomy. This chapter explores the critical technologies that form the foundation of unmanned surface vessels (USVs), examining their roles, development trajectories, and interconnectedness.
Navigation systems serve as the cornerstone of vessel operations, enabling precise positioning, route planning, and safe navigation. Recent developments in global navigation satellite systems (GNSSs), coupled with advancements in inertial navigation systems (INSs) and the integration of electronic chart display and information systems (ECDISs), are shaping the evolution of navigation technologies []. These systems interface with communication systems for real-time data exchange and with sensing technologies for environmental awareness. Communication systems facilitate seamless data exchange among ships, shore facilities, and maritime entities, fostering efficient coordination and enhancing safety. Current trends include the integration of satellite communication systems with terrestrial networks, the deployment of long-range Wi-Fi and 5G connectivity for rapid data transmission, and the augmentation of automatic identification systems (AISs) [,,,]. Communication systems synergize with navigation systems by providing live updates on vessel positions and complement control systems by enabling remote monitoring and management.
Propulsion systems are the driving force behind vessel movement, influencing fuel efficiency, environmental impact, and maneuverability. Recent advancements include the adoption of electric propulsion systems for emission reduction, the development of hybrid propulsion systems integrating traditional and alternative energy sources, and the integration of fuel efficiency optimization technologies [,]. Propulsion systems interact intricately with control systems for optimal power management and with sensing technologies for performance monitoring and environmental assessment.
Sensing technologies provide ships with comprehensive environmental awareness by detecting obstacles, weather conditions, and other vessels, thereby enhancing safety and situational awareness. Ongoing developments in radar and LiDAR systems enhance detection capabilities, while advancements in sonar systems enable underwater mapping and obstacle avoidance [,]. Optical and thermal imaging systems further augment visibility. Sensing technologies collaborate closely with navigation systems for route planning and collision avoidance and with communication systems for data exchange and remote monitoring.
Control systems govern the operation of USVs, encompassing propulsion, navigation, and maneuvering functions to ensure safe and efficient vessel management. Recent advancements include autonomous control algorithms for unmanned operations, dynamic positioning systems for precise vessel positioning, and integrated bridge systems for centralized control and monitoring [,,,,]. Control systems interface with navigation systems for course correction and route optimization, with communication systems for data exchange and remote operation, and with propulsion systems for power management.
The integration and advancement of navigation, communication, propulsion, sensing, and control systems constitute the backbone of USVs, enabling vessels to operate autonomously, safely, and efficiently. As these technologies continue to evolve and converge, the future of intelligent shipping holds promise for enhanced sustainability, safety, and performance across the maritime industry.
3.3. The Guidance Principle and Path-Following Control Algorithms for USVs
From the perspective of USV design, the automatic path-following system can be conceptualized as possessing a two-layer structure. The lower layer, referred to as the guidance principle, is tasked with generating reference signals and desired paths while adjusting speeds as necessary based on the path taken. This layer continuously plans the optimal path according to the current scenario. Conversely, the upper layer, denoted as the control algorithm, ensures that the USV converges to the set of desired paths parameterized in a suitably normalized manner.
3.3.1. The Guidance Principle of USVs
Numerous guidance principles for unmanned surface vehicles (USVs) have been proposed in the literature to generate reference signals. Among these, the line-of-sight (LOS) method is recognized as the most prominent and straightforward guidance principle []. Initially developed for the design of desired signals in missile flight control, the LOS guidance principle gained prominence due to its independence from the mathematical model of the controlled object in controller design, leading to widespread application in ship motion control. LOS is commonly employed in relatively simple and stable navigation tasks, such as inland waterways and coastal areas. However, it exhibits poor adaptability to environmental changes, rendering it less effective in dynamic sea conditions.
In response to the demands of navigation practice, the traditional LOS guidance principle has evolved in the following two primary directions: kinematics compensation design and convergence function design. As depicted in Table 3, several improved LOS guidance principles, such as Integral Line-of-Sight (ILOS), Adaptive Line-of-Sight (ALOS), Extended Line-of-Sight (ELOS), Predictor Line-of-Sight (PLOS), and Compound Line-of-Sight (CLOS), have been proposed to meet the requirements of ocean engineering [,,,,,,,].
Table 3.
The LOS guidance principles of USVs.
ILOS reduces steady-state errors, thereby improving path-following accuracy, but it assumes a constant current environment, limiting its effectiveness in dynamic sea conditions. ILOS is suitable for environments with relatively stable and predictable water currents, such as nearshore and coastal regions [,]. ALOS improves robustness under changing conditions; however, it also assumes a constant current environment, limiting its effectiveness in highly dynamic settings [,]. ELOS enhances path accuracy in dynamic currents, although its increased computational complexity might pose challenges for real-time implementation on USVs [,]. PLOS improves path-following performance in rapidly changing environments, but it requires accurate prediction models, which can be difficult to obtain in practice. PLOS is advantageous in environments with rapidly changing currents and external disturbances, such as busy harbors []. CLOS combines multiple LOS strategies to address various navigational challenges, providing a comprehensive solution, yet its complexity can lead to higher computational demands and implementation difficulties [].
By understanding the methods, advantages, disadvantages, and engineering application backgrounds of these LOS guidance principles and their improvements, we can better appreciate their practical applications and suitability in different scenarios within intelligent shipping.
The dynamic virtual ship (DVS) guidance principle was proposed to generate the reference path when the distance between the actual ship and the waypoint is considered []. To self-adjust the threshold of a DVS based on marine engineering, an adaptive dynamic virtual ship (ADVS) guidance principle was proposed with a self-adaptive mechanism []. As show in Table 4, there is a large overshoot between waypoints. The logical virtual ship (LVS)-based steering law was developed to program a rational reference route, which is to guide the USV in practical engineering []. Intervened logic virtual ship (ILVS) guidance was developed to generate a reference signal and further tackle the input saturation constraint by employing the dynamic feedback evaluation rule []. These guidance strategies focus on providing reference signals rather than on path planning, with the reference paths generated by predefined waypoints. However, in ocean engineering tasks, some mission waypoints are unpredictable. Therefore, it is crucial to integrate a path-planning module into the guidance system. The artificial potential field (APF) method proposed by Khatib in 1985 primarily achieves path planning by setting attractive and repulsive points []. Due to the smooth and safe nature of the paths generated by the APF method, as well as its mathematically elegant and straightforward formulation, it has been widely adopted in the path-planning and obstacle avoidance tasks of intelligent agents such as unmanned aerial vehicles (UAVs), spacecraft, and robotic arms []. Nonetheless, because ships exhibit characteristics such as high inertia, significant time delays, and underactuation, their dynamic response performance differs considerably from that of the aforementioned intelligent agents. Consequently, existing APF algorithms cannot be directly applied to ship navigation guidance. A novel artificial potential field guidance scheme was proposed to provide a new solution for ship collision avoidance in emergency situations. This approach effectively handles dynamic targets and static obstacles, ensuring safe navigation during emergencies []. To meet the requirement of ocean engineering, a novel dynamic artificial potential field (DAPF) guidance principle based on a DVS was designed to constrain the yaw angle in path-following tasks []. With the advancement of research, the design concept for guidance principles has gradually shifted from providing reference signals for path-following control systems to developing integrated planning and guidance schemes tailored to specific ocean engineering tasks. Building on the foundation of USV swarms, several guidance algorithms have been developed specifically for multi-ship scenarios. Particularly for planning and guidance in multi-ship encounter situations, new intelligent algorithms have been introduced to design real-time obstacle avoidance paths for multiple ships [].
Table 4.
Uncertainties and unknown external disturbances of system models.
3.3.2. The Path-Following Control Algorithm of USVs
In the realm of control, extant research elucidates that the dynamic performance of unmanned surface vessels (USVs) does not conform to Brockett’s theorem. Consequently, control tasks for these vessels necessitate the design of either continuous time-varying or discontinuous steady-state feedback control laws. Path-following control refers to the ability of a control system to ensure that a vehicle or vessel follows a predefined path or trajectory over time. This is crucial in marine applications, where USVs must navigate complex environments while maintaining a desired course. The seminal work repoted in [,,,] pioneered the incorporation of the Serret–Frenet coordinate framework into research on path-following control for USVs, ensuring the convergence of path-following control under conditions of unknown ocean currents. Acquiring an accurate model of a ship is inherently challenging, rendering system model uncertainties and unknown external disturbances as critical impediments in the study of ship path-following control tasks. Ships exhibit high inertia and slow time-varying dynamics, which impose stringent requirements on attitude control algorithms. The inherent characteristics of ships, such as strong coupling, further complicate the control tasks. Considerations of input saturation of ship actuators are essential to prevent control input from exceeding the physical limits of the actuators [,,]. To meet the practical demands of marine engineering, aspects such as actuator wear, potential failures, and control accuracy must be integrated into the controller design. These attributes complicate the control tasks further, necessitating advanced control strategies to achieve reliable and efficient path-following performance [,,,].
3.3.3. Uncertainties and Unknown External Disturbances of the System Model
In [], to develop a highly robust adaptive path-following controller under conditions of unknown disturbances and model uncertainties, the authors employed radial basis function neural networks (RBF-NNs) to approximate and compensate for overall uncertainties, addressing the system’s unknown components. However, this method requires all neural network weight vectors to be learned online, which significantly increases computational complexity. To mitigate the issue of excessive online parameters, a robust neural damping technique that integrates minimal parameter learning with RBF-NNs was devised, effectively reducing the number of parameters required for online learning []. While this technique reduces the computational load, it may still face challenges in handling highly dynamic and nonlinear disturbances. To further enhance the robustness of the system, adaptive backstepping methods combined with Lyapunov stability theory were proposed for the design of the system’s controller, with theoretical analyses substantiating the stability and convergence of the control system. However, this approach can be complex to implement and may require extensive tuning of the control parameters. In [], under the assumption of constant environmental disturbances, a global path-following controller was designed utilizing full-state feedback control, ensuring that the vessel’s velocity direction remains tangential to the desired path. This method simplifies the control design but may not be effective under varying or unpredictable environmental conditions. As shown in Table 4, the characteristics of the above three calculations are expressed as follows.
3.3.4. The Input Saturation
Each input of the ship system is subject to the physical limitations of the actuators. However, for simplification in the design of the control system, input saturation is often neglected, which can lead to performance degradation, delays, overshooting, undershooting, and instability in the closed-loop response of the actual system. Consequently, researchers have conducted extensive studies to address input saturation in the context of path-following control [,,,].
In [], robust adaptive RBF-NNs, along with an auxiliary design system, were proposed as a framework for backstepping control to handle the path-following control problem of unmanned surface vessels considering input saturation. Similarly, in [], Gaussian error function approximation was employed to address the input saturation problem in ship systems. Both approaches are computationally simple and easy to implement in engineering applications. However, these methods may face challenges in handling highly dynamic and nonlinear disturbances. To further enhance control accuracy, a simplified serial–parallel estimation model was designed on the basis of the auxiliary system handling input saturation, thereby improving the compensation effect []. An adaptive backstepping controller that integrates a prescribed performance function with a disturbance observer was proposed to solve the path-following control problem of dynamically positioned ships considering time-varying disturbances and input saturation. This control scheme ensures both the transient and steady-state performance of path following []. However, this approach can be complex to implement and may require extensive tuning of the control parameters. In [], a continuous fixed-time disturbance observer based on integral sliding mode and timing control was constructed on the foundation of a nonlinear auxiliary dynamic system to address input saturation issues through deviation feedback. This method simplifies the control design but may not be effective under varying or unpredictable environmental conditions. Future research should focus on developing more adaptive and robust control strategies that can handle a wide range of disturbances and operational scenarios, ensuring the reliable and efficient operation of unmanned surface vessels in diverse environments. In order to further analyze the performance of the above methods, the average error and the running time of the program under various environments were used to quantify the control performance and computation load of these methods. The results are shown in Table 5.
Table 5.
Quantitative comparison of the performance of five methods.
3.3.5. Actuator Faults
Research on ship faults is fundamental for the achievement of USV path-following tasks, with fault-tolerant control being an effective tool for addressing ship faults. By combining fault diagnosis and fault-tolerant control, a scheme that adjusts control before a fault occurs was designed in []. However, this pre-emptive approach may face challenges in accurately predicting faults in real time, leading to potential false positives or negatives, which could result in unnecessary control adjustments or overlooked faults.
To ensure that USV systems can operate normally, even in the presence of multiple sensor or actuator faults, a method based on graph theory was employed for system structure analysis, fault diagnosis, and fault-tolerant control design []. While this method provides a structured approach to fault management, it can become computationally intensive and complex, especially for large-scale systems, potentially impacting real-time performance and scalability. As research progresses, fault-tolerant control for USVs in practical conditions such as path-following, dynamic positioning, and obstacle avoidance has gradually become a hot topic. A novel technique known as adaptive fault-tolerant proportional-integral path-following control combines adaptive technology with fault-tolerant control, mitigating the issue of unknown actuator gain due to actuator faults while ensuring good following performance and fault tolerance in a simple and feasible manner []. Despite its advantages, this method may struggle with rapid changes in fault conditions, potentially compromising the robustness and reliability of the control system. To address the path-following problem under actuator faults and environmental disturbances within a fixed time frame, a novel fault-tolerant path-following control strategy based on boundary functions and constraint handling methods was utilized in []. While effective, this approach can be limited by its dependence on accurate boundary function definitions and constraint formulations, which may not always be feasible in dynamic and unpredictable marine environments. In [], a new composite neural learning fault-tolerant algorithm was employed to achieve path-following tasks for USVs with event-triggered inputs. The complexity and computational demands of neural networks may pose challenges for real-time implementation and require significant computational resources, potentially limiting their applicability in resource-constrained scenarios. In [], disturbance observers and fault observers were integrated with dynamic event-triggered and vector backstepping control methods to achieve dynamic event-triggered composite anti-disturbance and fault-tolerant path following. Despite the enhanced fault tolerance and disturbance rejection, the integration of multiple control strategies can increase system complexity and make tuning and maintenance more difficult. With the advancement of artificial intelligence, some machine learning algorithms have also been introduced. For instance, in [], a new data-driven fault detection method was proposed that combines the advantages of the expected behavior model with optimal regression model selection and an exponentially weighted moving average for fault detection, making it suitable for USVs. Nevertheless, data-driven methods rely heavily on the quality and quantity of available data, and their performance can degrade in the presence of noisy or insufficient data. While each of these solutions offers significant advantages in terms of fault-tolerant control for USVs, they also come with inherent limitations and challenges. Predictive control schemes may struggle with real-time accuracy, graph theory-based methods can be computationally intensive, and adaptive techniques might face robustness issues with rapid fault changes. Boundary function methods depend on precise definitions, neural learning algorithms require substantial computational resources, and the integration of multiple strategies can complicate system design and maintenance. Data-driven methods hinge on data quality, which can be a limiting factor. Balancing these pros and cons is essential in developing effective and robust fault-tolerant control systems for USVs. To evaluate the fault tolerance of the control algorithms discussed earlier under fault conditions, we employed code available on GitHub to simulate their application to a second-order general path-following system analogous to a maritime vessel. As illustrated in Figure 2, the simulation was conducted using Python, with a tracking duration of 100 s. A fault was introduced at the 50-s mark to assess the performance of the algorithms under fault conditions.
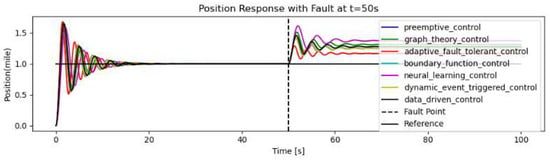
Figure 2.
Comparative control methods for USVs under fault conditions.
3.3.6. The Control Precision of Path Following
With the development of ocean engineering, the precision requirement of path-following control has increased significantly. However, when navigating in complex marine environments, USV path-following control is still affected by disturbances from wind, waves, and currents. To execute high-precision marine engineering tasks such as submarine cable laying and automatic berthing and unberthing, advanced intelligent algorithms like model predictive control (MPC), iterative learning control (ILC), and prescribed performance control (PPC) are employed to design more accurate path-following controllers for USVs [,,,,,,,,,].
MPC can achieve superior control precision through prediction when addressing multi-input coupling control problems with constraints. In [], an MPC controller was designed for USVs considering wind, wave. This controller offers higher control accuracy while maintaining high robustness, surpassing adaptive control. In [], a disturbance observer was designed to estimate and compensate for real-time sea current effects. An MPC controller was developed with control input constraints, effectively overcoming the impacts of model and environmental uncertainties. However, traditional MPC can cause heading oscillations during large turns, and it typically requires significant computational resources, which may be impractical for real-time applications on USVs with limited onboard processing power.
For the path-following problem with error constraints, input saturation and unknown external disturbances, a prescribed performance control law incorporating an error performance index function was proposed in []. In [], an adaptive path-following controller combining barrier Lyapunov function techniques with an adaptive neural network was designed. Its stability time is independent of the system’s initial conditions and is preset. To address unknown time-varying disturbances and dynamic model parameter uncertainties in automatic berthing control, a PPC controller based on a predefined performance time function was proposed in []. In [], a novel displacement function was designed to ensure a faster convergence speed while keeping the path-following error within a predefined range. Despite these advantages, PPC can be complex to design and tune, and the performance is highly dependent on the accurate modeling of disturbances and system parameters, which can be challenging in dynamic marine environments.
As shown in Figure 3, ILC is designed to enhance system control performance through continuous iterations. To tackle the issue of insufficient control accuracy, ILC was proposed as a new path-following algorithm for USVs in []. Although traditional ILC significantly improves control accuracy, it does not consider some fundamental factors of the USV control system, such as robustness and non-repetitiveness. In [], an improved ILC algorithm was proposed to address this issue, reducing the computational burden inherent to ILC, which conflicts with onboard equipment. By integrating dynamic surface control and robust neural damping techniques, the “complexity explosion” problem of ILC was mitigated. Furthermore, ref. [] introduced an event-triggered ILC to reduce the number of iterations by incorporating an input event-trigger mechanism, achieving self-adjustment of iteration numbers through the event-trigger mechanism. To reduce the computational load, ref. [] proposed a two-dimensional event-trigger mechanism for both the time and iteration domains, significantly decreasing actuator perturbation frequency while maintaining high-precision control. However, ILC’s performance may degrade in non-repetitive tasks or under significant environmental disturbances, limiting its applicability in highly dynamic marine conditions. To assess the tracking accuracy of the control algorithms discussed above, this chapter presents a comparison of three control strategies—PPC, MPC, and ILC—applied to a 38-m ship model under the time-varying disturbance described in Equation (1). As depicted in Figure 4, these algorithms were tested on a trajectory comprising both straight and curved segments. The core idea of this algorithm is to iteratively adjust the control input based on the feedback of the previous step’s error until the error meets the desired threshold. The results indicate that the ILC algorithm, through multiple iterations, achieves superior control accuracy compared to the other methods.
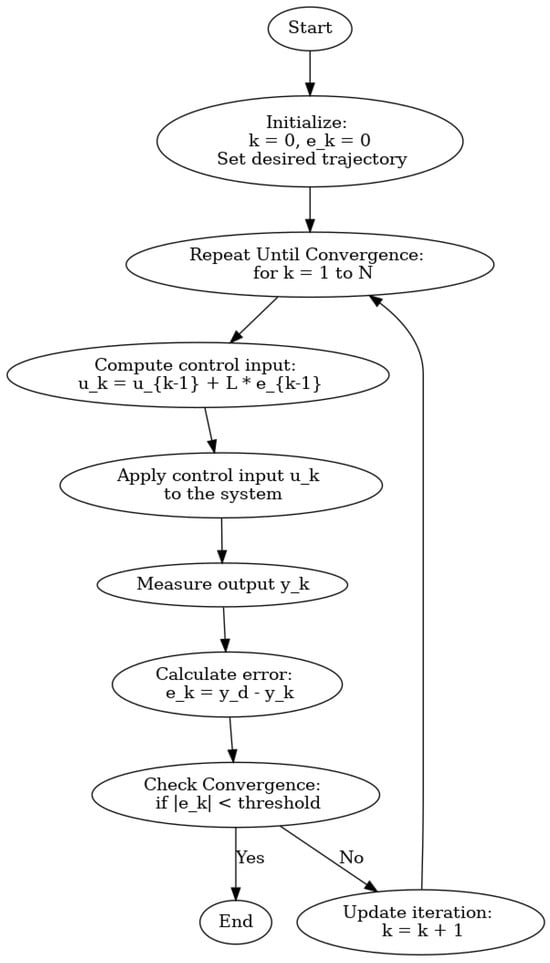
Figure 3.
Pseudo-code diagram of iterative learning control algorithm.
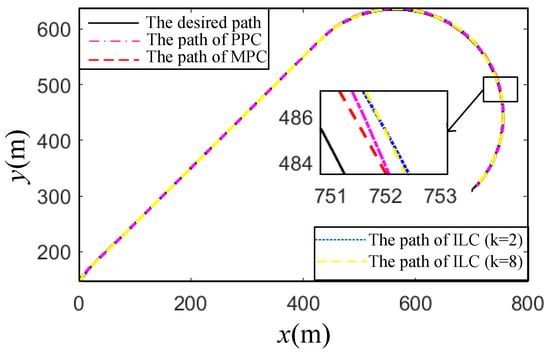
Figure 4.
Comparison of the control accuracies of different control algorithms.
In conclusion, while advanced intelligent algorithms like MPC, PPC, and ILC have been employed to enhance the precision of USV path-following controllers, each method has its own set of advantages and limitations. MPC excels in handling multi-input coupling control problems but can cause heading oscillations and requires considerable computational resources. PPC offers robust performance with predefined error constraints but is complex to design and tune. ILC improves control accuracy but may struggle with robustness and applicability in non-repetitive tasks. Future research should focus on hybrid approaches that combine the strengths of these algorithms to overcome their individual limitations, ensuring high-precision and robust path-following control in complex marine environments.
3.3.7. The Frequency of Communication
An event-triggered mechanism continuously monitors system state changes and transmits state information when certain event-trigger conditions are met. In [], a robust path-following controller based on MPC was designed, and by introducing an event-triggered strategy, the computational load of the MPC was reduced. However, this approach may lead to increased control system delays, potentially affecting control accuracy. To avoid frequent actions of actuators during path-following control tasks, event-triggered control (ETC) technology was adopted in the controller design proposed in [], reducing actuator action frequency but potentially causing system instability under extreme conditions. In [], event-triggered technology was introduced into the control design, significantly reducing the update frequency of the controller and the wear on the actuators compared to traditional time-triggered controllers.
To reduce the communication burden between the controller and the actuator, an event-triggered robust adaptive path-following controller for USVs was designed in []. However, its threshold adjustment process can be complex and requires precise online parameter tuning, presenting challenges in practical applications []. To further decrease the communication burden and actuator wear, ref. [] proposed a dynamic event-triggered mechanism with adjustable thresholds. This mechanism ensures that the trigger threshold is updated online in an adaptive manner, achieving better resource efficiency, although increasing the complexity of system design and implementation and demanding greater computational resources. In [], a dynamic event-triggered control method was optimized by setting a barrier function to fine tune threshold parameters, helping reduce resource waste and channel occupancy while avoiding the Zeno phenomenon. Nevertheless, this approach may add to the system’s complexity and resource demands. To prevent oscillations caused by continuous calculation of heading reference signals. To evaluate the effectiveness of event-triggered mechanisms in reducing communication trigger frequency, the author conducted path-following control experiments using the three aforementioned methods. Figure 5 presents a spike plot of the control input trigger intervals for each of the three algorithms. The results indicate that event-triggered mechanisms can effectively discretize real-time signal transmission, with the degree of discretization varying depending on the specific event-triggered mechanism employed.
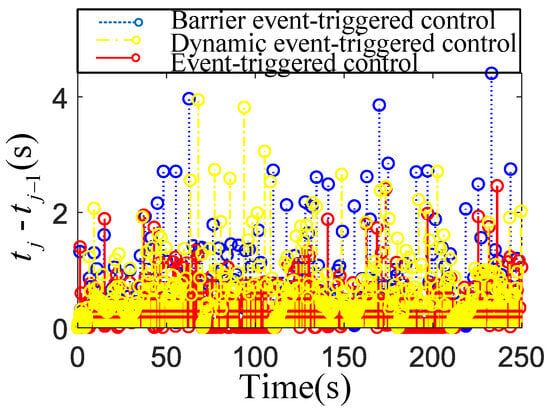
Figure 5.
Event-trigger effect comparison diagram.
In summary, while event-triggered mechanisms provide significant benefits in terms of reducing computational loads, communication burdens, and actuator wear, they also present challenges such as potential delays, system instability, complexity in parameter tuning, and measurement precision. Future research should focus on addressing these limitations to further enhance the efficiency and reliability of event-triggered control systems.
3.4. The Development Tendency of Guidance and Control Systems for Underactuated Surface Vessels
The evolution of guidance and control systems for USVs reflects significant theoretical advancements that are gradually being translated into practical engineering applications. The complexity and unique challenges presented by USVs have spurred innovations in guidance strategies and control algorithms, which are increasingly incorporating intelligent algorithms to meet the demands of modern marine engineering. As show in Figure 6, to meet the demands of increasingly complex marine engineering tasks, the design approaches for path-following control algorithms and guidance strategies can be considered from the following eight perspectives.
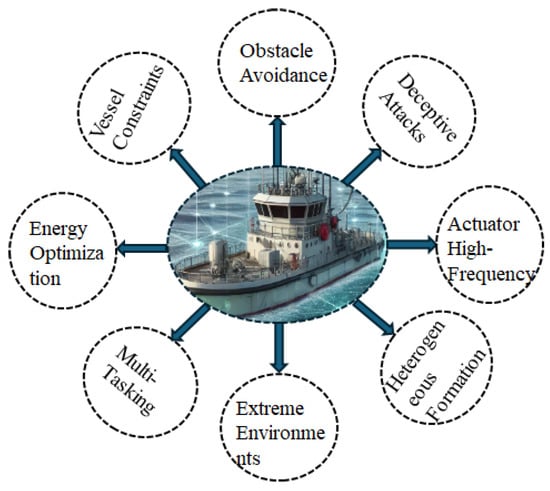
Figure 6.
Technical challenges for the future development of USV.
3.4.1. Ship Obstacle Avoidance
Research on single-vessel obstacle avoidance has become quite advanced. Traditional approaches often simplify the problem by modeling the vessel’s safety domain as a fixed circle centered on the vessel. However, practical scenarios demand more nuanced models that consider factors like vessel speed and the specific encounter scenarios. Dynamic safety domains, which adjust according to the context, represent a significant step forward. However, existing dynamic models often fall short when dealing with multiple vessels simultaneously. Machine learning algorithms offer promising solutions by dynamically adapting safety domains based on real-time data, potentially improving collision avoidance in complex environments. Multi-vessel formation obstacle avoidance is gaining traction, especially with the advent of machine learning and reinforcement learning algorithms. These approaches show promise in handling the complexity of multiple USVs operating in unison. However, emergency situations require algorithms capable of rapidly computing optimal paths. Traditional artificial potential field methods, while computationally efficient, sometimes yield impractical paths in multi-vessel scenarios. Enhancing these methods or integrating game theory-based approaches could provide more balanced and effective solutions for real-time multi-vessel navigation.
3.4.2. Deceptive Attacks
The increasing deployment of USVs has brought cybersecurity to the forefront. USVs are vulnerable to various cyberattacks, including distributed denial of service (DDoS) attacks, data tampering, and communication disruptions. Current research primarily addresses individual attack vectors, but real-world scenarios often involve multiple simultaneous attacks, complicating defense mechanisms. Developing robust, real-time control systems that can efficiently manage computational resources while resisting cyber threats is an ongoing challenge.
3.4.3. High-Frequency Actuator Perturbations
High-frequency perturbations in actuators pose a significant challenge for USV path-following control. Event-triggered control mechanisms can mitigate these issues by reducing the frequency of control updates, but they often introduce chattering, leading to increased wear on actuators. The implementation of time-delay quantized input methods, which smooth control inputs via appropriate delays, has shown potential in addressing these challenges. Future research could focus on leveraging machine learning and deep learning technologies to develop intelligent event-triggered algorithms that dynamically adjust based on real-time conditions.
3.4.4. Heterogeneous Formation
Formation control, particularly for heterogeneous vessels, remains a complex area of study. Different vessel types have distinct dynamic models and movement characteristics, necessitating adaptable control algorithms. Distributed model predictive control algorithms enable individual vessels to optimize decisions based on local information, facilitating coordinated global control. However, the computational complexity of real-time strategy updates often limits their practical application. Simplifying these algorithms without compromising performance is a critical area for future research.
3.4.5. Extreme Environments
USVs often operate in extreme environments characterized by harsh conditions like strong winds, high waves, and icy waters. Path planning and control in such conditions require robust and adaptive techniques. Current research focuses on machine learning and deep learning algorithms to enhance decision making in these environments, as well as traditional algorithms like A* and Dijkstra for dynamic path planning []. Combining these approaches with robust adaptive control techniques can improve USV performance under extreme conditions.
3.4.6. Multi-Tasking
USVs are increasingly required to perform multiple tasks across various domains, such as ocean engineering, resource exploration, and environmental protection. This necessitates flexible control systems capable of switching between different algorithms to meet diverse mission requirements. Developing multi-algorithm switching control strategies that ensure smooth transitions, real-time performance and robustness in complex environments remains a significant challenge. Integrating artificial intelligence to create adaptive switching strategies could enhance the versatility and efficiency of USVs.
3.4.7. Energy Consumption Optimization
The push towards low-carbon shipping, driven by regulatory bodies like the International Maritime Organization, highlights the need for energy-efficient USVs. Current control algorithms focus primarily on robustness and accuracy but often neglect energy consumption. Future research should aim to develop intelligent algorithms that balance control performance with energy efficiency. Incorporating energy consumption considerations into path planning and optimizing propulsion systems through advanced algorithms can significantly reduce fuel usage.
3.4.8. Consideration of Vessel Constraints
Vessels have inherent physical constraints such as large inertia and latency, which are often overlooked in path-planning algorithms. Effective path following requires consideration of these constraints, including maximum speed, turning radius, and acceleration/deceleration capabilities. Designing control algorithms that fully consider these factors can enhance the efficiency and reliability of USVs, ensuring safe and effective operations in complex marine environments.
For future research on intelligent guidance and control algorithms for Unmanned Surface Vessels (USVs), focus on the following areas is recommended: dynamic obstacle avoidance by developing machine learning algorithms that adapt in real time to speed and encounter scenarios; cybersecurity by creating robust real-time control systems resistant to various cyberattacks; actuator perturbations by using intelligent event-triggered control algorithms to minimize high-frequency disturbances; heterogeneous formation control by simplifying and optimizing distributed model predictive control algorithms; operation in extreme environments by combining traditional and machine learning algorithms to enhance decision making; multi-tasking by developing multi-algorithm switching control strategies for flexible task transitions; energy optimization by creating energy-efficient intelligent control algorithms; vessel constraint consideration by designing control algorithms that account for physical constraints like inertia and speed. These areas will enhance the safety, efficiency, and adaptability of USVs.
4. Conclusions
This manuscript provides a valuable reference for theoretical research and engineering applications of intelligent navigation by summarizing the current status, potential solutions, and technical challenges of intelligent guidance strategy and path-following control algorithms for USVs. It proposes future development directions for USVs by providing an overview of relevant standards for their intelligence levels and describing the current status of USV engineering practices. To illustrate the role of intelligent guidance strategies and path-tracking control in USVs, this manuscript briefly introduces the pivotal technologies involved, including navigation systems, communication systems, propulsion systems, control systems, and sensing technologies. From the perspective of theoretical design, this paper addresses the safety requirements, task requirements, and energy efficiency needs of practical ship engineering and summarizes previous literature based on solutions and main advantages. In light of the shortcomings of the methods proposed in the aforementioned literature regarding engineering applications, this paper presents the development directions, main challenges, and possible solutions for intelligent guidance strategies and path-tracking algorithms of USVs, in line with trends towards larger sizes, specialized differentiation, clustering, and environmental sustainability.
This manuscript provides a comprehensive review of the current research status, potential solutions, and technological challenges related to intelligent guidance strategies and path-following control algorithms for USVs. By summarizing the relevant standards for USV intelligence levels and detailing the current state of engineering practices, this paper offers valuable insights for both theoretical research and practical applications in the field of intelligent navigation. The findings contribute to a deeper understanding of the critical technologies that support USV development and highlight future research directions that will enable more effective and sustainable autonomous maritime operations.
To illustrate the role of intelligent guidance strategies and path-following control in USVs, this study introduces key technologies such as navigation systems, communication systems, propulsion systems, control systems, and sensing technologies. From a theoretical design perspective, this paper addresses the safety, mission, and energy efficiency requirements of practical ship engineering, summarizing existing literature on proposed solutions and their main advantages.
Based on these findings, this manuscript proposes future development directions for intelligent guidance strategies and path-following algorithms. These directions focus on enhancing dynamic obstacle avoidance, improving cybersecurity, reducing actuator perturbations, and optimizing energy consumption. Additionally, this study identifies the need for advanced multi-algorithm control strategies that are adaptive and capable of handling complex marine environments. Furthermore, the development of navigation algorithms that consider the physical constraints of USVs, such as inertia and speed limitations, is essential to enhance safety, efficiency, and adaptability.
Looking ahead, the evolution of intelligent guidance and control algorithms for USVs will depend these gaps being addressed through further research and development. A focus on integrated, energy-efficient navigation systems; robust cybersecurity measures; and adaptive control algorithms will be critical to advancing USV capabilities. By providing theoretical support and practical references, this paper aims to foster continued innovation in autonomous maritime navigation, ultimately promoting the broader application and continuous improvement of USVs in diverse real-world scenarios.
In conclusion, by bridging the gap between current research and future needs, this study provides a foundational framework for advancements in the field of intelligent navigation for USVs. The insights and recommendations presented here are intended to guide future research efforts, support engineering innovation, and enhance the practical deployment of USVs, contributing to safer, more efficient, and sustainable maritime operations.
Author Contributions
X.S.: methodology, formal analysis, writing—original draft, and writing—review and editing; G.Z.: conceptualization, software, validation, writing—review and editing, and funding acquisition; H.L.: validation, formal analysis, and writing—review and editing; G.T.: project administration, funding acquisition, and writing—review and editing. All authors have read and agreed to the published version of the manuscript.
Funding
The paper is partially supported by the National Excellent Youth Science Fund of China (52322111) the National Natural Science Foundation of China (52171291), the Applied Fundamental Research Program of Liaoning Province (2023JH2/101600039), the Youth Talent Support Program of Liaoning Province (XLYC2203129) the Dalian Science and Technology Program for Distinguished Young Scholars (2022RJ07), the Fundamental Research Funds for the Central Universities (3132023137, 3132023502).
Conflicts of Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
References
- Ziajka-Poznańska, E.; Montewka, J. Costs and benefits of autonomous shipping—A literature review. Appl. Sci. 2021, 11, 4553. [Google Scholar] [CrossRef]
- Chun, D.H.; Roh, M.I.; Lee, H.W.; Ha, J.; Yu, D. Deep reinforcement learning-based collision avoidance for an autonomous ship. Ocean. Eng. 2021, 234, 109216. [Google Scholar] [CrossRef]
- Fossen, T.I. An adaptive line-of-sight (ALOS) guidance law for path following of aircraft and marine craft. IEEE Trans. Control. Syst. Technol. 2023, 31, 2887–2894. [Google Scholar] [CrossRef]
- Blindheim, S.; Johansen, T.A.; Utne, I.B. Risk-based supervisory control for autonomous ship navigation. J. Mar. Sci. Technol. 2023, 28, 624–648. [Google Scholar] [CrossRef]
- Marley, M.; Skjetne, R.; Gil, M.; Krata, P. Four degree-of-freedom hydrodynamic maneuvering model of a small azipod-actuated ship with application to onboard decision support systems. IEEE Access 2023, 11, 58596–58609. [Google Scholar] [CrossRef]
- Karatuğ, Ç.; Tadros, M.; Ventura, M.; Soares, C.G. Strategy for ship energy efficiency based on optimization model and data-driven approach. Ocean. Eng. 2023, 279, 114397. [Google Scholar] [CrossRef]
- Chae, C.J. The Evolution of Maritime Technology Development: A Dynamic Positioning System Perspective of Maritime Autonomous Surface Ship. WMU J. Marit. Aff. 2024, 1–29. [Google Scholar] [CrossRef]
- Chen, W.; Tai, K.; Lau, M.W.S.; Abdelhakim, A.; Chan, R.R.; Ådnanes, A.K.; Tjahjowidodo, T. Optimal power and energy management control for hybrid fuel cell-fed shipboard DC microgrid. IEEE Trans. Intell. Transp. Syst. 2023, 24, 14133–14150. [Google Scholar] [CrossRef]
- Rongcai, Z.; Hongwei, X.; Kexin, Y. Autonomous collision avoidance system in a multi-ship environment based on proximal policy optimization method. Ocean. Eng. 2023, 272, 113779. [Google Scholar] [CrossRef]
- Fan, A.; Li, Y.; Liu, H.; Tian, Z.; Li, Y.; Vladimir, N. Development trend and hotspot analysis of ship energy management. J. Clean. Prod. 2023, 389, 135899. [Google Scholar] [CrossRef]
- Bae, I.; Hong, J. Survey on the developments of unmanned marine vehicles: Intelligence and cooperation. Sensors 2023, 23, 4643. [Google Scholar] [CrossRef]
- Helmer, K. Unmanned Surface Vessels as a Safer and More Sustainable Alternative for Maritime Operations within the Offshore Safety Zone. Master’s Thesis, Høgskolen på Vestlandet, Bergen, Norway, 2021. [Google Scholar]
- Aslam, S.; Michaelides, M.P.; Herodotou, H. Internet of ships: A survey on architectures, emerging applications, and challenges. IEEE Internet Things J. 2020, 7, 9714–9727. [Google Scholar] [CrossRef]
- Liu, C.; Chu, X.; Wu, W.; Li, S.; He, Z.; Zheng, M.; Li, Z. Human–machine cooperation research for navigation of maritime autonomous surface ships: A review and consideration. Ocean. Eng. 2022, 246, 110555. [Google Scholar] [CrossRef]
- Thombre, S.; Zhao, Z.; Ramm-Schmidt, H.H.; Vallet Garcia, J.M.; Malkamäki, T.; Nikolskiy, S.; Lehtola, V.V. Sensors and AI techniques for situational awareness in autonomous ships: A review. IEEE Trans. Intell. Transp. Syst. 2020, 23, 64–83. [Google Scholar] [CrossRef]
- Yang, T. Intelligent ships. In Maritime Law in Motion; Springer: Berlin/Heidelberg, Germany, 2020; pp. 703–711. [Google Scholar]
- Liu, J.; Yang, F.; Li, S.; Lv, Y.; Hu, X. Testing and evaluation for intelligent navigation of ships: Current status, possible solutions, and challenges. Ocean. Eng. 2024, 295, 116969. [Google Scholar] [CrossRef]
- Di Ciaccio, F.; Troisi, S. Monitoring marine environments with autonomous underwater vehicles: A bibliometric analysis. Results Eng. 2021, 9, 100205. [Google Scholar] [CrossRef]
- Li, X.; Wang, Y.; Yan, L.; Wang, K.; Deng, F.; Wang, F.Y. ParallelEye-CS: A New Dataset of Synthetic Images for Testing the Visual Intelligence of Intelligent Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 9619–9631. [Google Scholar] [CrossRef]
- Mina, T.; Singh, Y.; Min, B.C. Maneuvering ability-based weighted potential field framework for multi-USV navigation, guidance, and control. Mar. Technol. Soc. J. 2020, 54, 40–58. [Google Scholar] [CrossRef]
- Wang, J.; Xiao, Y.; Li, T.; Chen, C.P. A survey of technologies for unmanned merchant ships. IEEE Access 2020, 8, 224461–224486. [Google Scholar] [CrossRef]
- Lyu, H.; Shao, Z.; Cheng, T.; Yin, Y.; Gao, X. Sea-surface object detection based on electro-optical sensors: A review. IEEE Intell. Transp. Syst. Mag. 2022, 15, 190–216. [Google Scholar] [CrossRef]
- Lyu, H.; Liu, W.; Guo, S.; Tan, G.; Fu, C.; Sun, X.; Yin, Y. Autonomous collision avoidance method for MASSs based on precise potential field modelling and COLREGs constraints in complex sailing environments. Ocean. Eng. 2024, 292, 116530. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. Fast path planning for autonomous ships in restricted waters. Appl. Sci. 2018, 8, 2592. [Google Scholar] [CrossRef]
- Hu, B.B.; Zhang, H.T.; Liu, B.; Ding, J.; Xu, Y.; Luo, C.; Cao, H. Coordinated navigation control of cross-domain unmanned systems via guiding vector fields. IEEE Trans. Control. Syst. Technol. 2023, 2, 550–563. [Google Scholar] [CrossRef]
- Xiao, G.; Yang, D.; Xu, L.; Li, J.; Jiang, Z. The application of artificial intelligence technology in shipping: A bibliometric review. J. Mar. Sci. Eng. 2024, 12, 624. [Google Scholar] [CrossRef]
- Martelli, M.; Virdis, A.; Gotta, A.; Cassarà, P.; Di Summa, M. An outlook on the future marine traffic management system for autonomous ships. IEEE Access 2021, 9, 157316–157328. [Google Scholar] [CrossRef]
- Burmeister, H.C.; Bruhn, W.; Rødseth, Ø.J.; Porathe, T. Autonomous unmanned merchant vessel and its contribution towards the e-Navigation implementation: The MUNIN perspective. Int. J. e-Navig. Marit. Econ. 2014, 1, 1–13. [Google Scholar] [CrossRef]
- Evensen, M.H. Safety and Security of Autonomous Vessels. Based on the Yara Birkeland Project. Master’s Thesis, The University of Bergen, Bergen, Norway, 2020. [Google Scholar]
- Li, J.; Zhang, G.; Shan, Q.; Zhang, W. A novel cooperative design for USV-UAV systems: 3D mapping guidance and adaptive fuzzy control. IEEE Trans. Control. Netw. Syst. 2023, 10, 564–574. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Trajectory tracking control of AUVs via adaptive fast nonsingular integral terminal sliding mode control. IEEE Trans. Ind. Inform. 2019, 16, 1248–1258. [Google Scholar] [CrossRef]
- Mohammadzadeh, A.; Sabzalian, M.H.; Zhang, W. An interval type-3 fuzzy system and a new online fractional-order learning algorithm: Theory and practice. IEEE Trans. Fuzzy Syst. 2019, 28, 1940–1950. [Google Scholar] [CrossRef]
- Zhang, G.; Li, J.; Jin, X.; Liu, C. Robust adaptive neural control for wing-sail-assisted vehicle via the multiport event-triggered approach. IEEE Trans. Cybern. 2021, 52, 12916–12928. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Adaptive second-order fast nonsingular terminal sliding mode tracking control for fully actuated autonomous underwater vehicles. IEEE J. Ocean. Eng. 2018, 44, 363–385. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Zhang, W.; Shan, Q.; Zhang, W. Cooperative path following control of USV-UAVs considering low design complexity and command transmission requirements. IEEE Trans. Intell. Veh. 2023, 9, 714–724. [Google Scholar] [CrossRef]
- Angrisano, A. GNSS/INS Integration Methods. Ph.D. Thesis, Universita’degli Studi di Napoli PARTHENOPE, Naple, Italy, 2010; p. 21. [Google Scholar]
- Oruc, A.; Gkioulos, V.; Katsikas, S. Towards a cyber-physical range for the integrated navigation system (INS). J. Mar. Sci. Eng. 2022, 10, 107. [Google Scholar] [CrossRef]
- Alqurashi, F.S.; Trichili, A.; Saeed, N.; Ooi, B.S.; Alouini, M.S. Maritime communications: A survey on enabling technologies, opportunities, and challenges. IEEE Internet Things J. 2022, 10, 3525–3547. [Google Scholar] [CrossRef]
- Sławomir, G. Maritime Communications Network Development Using Virtualised Network Slicing of 5G Network. NAŠE MORE: Znanstveni časopis More Pomor. 2020, 67, 78–86. [Google Scholar] [CrossRef]
- Di Ciaccio, F.; Menegazzo, P.; Troisi, S. Optimization of the maritime signaling system in the lagoon of venice. Sensors 2019, 19, 1216. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.; Ma, J. Ship navigation behavior prediction based on AIS data. IEEE Access 2022, 10, 47997–48008. [Google Scholar] [CrossRef]
- Tay, Z.Y.; Konovessis, D. Sustainable energy propulsion system for sea transport to achieve United Nations sustainable development goals: A review. Discov. Sustain. 2023, 4, 20. [Google Scholar]
- Damian, S.E. Review on the challenges of hybrid propulsion system in marine transport system. J. Energy Storage 2022, 56, 105983. [Google Scholar] [CrossRef]
- Mullen, L.J.; Vieira, A.J.C.; Herezfeld, P.R.; Contarino, V.M. Application of RADAR technology to aerial LIDAR systems for enhancement of shallow underwater target detection. IEEE Trans. Microw. Theory Tech. 1995, 43, 2370–2377. [Google Scholar] [CrossRef]
- Martin, A.; An, E.; Nelson, K. Obstacle detection by a forward looking sonar integrated in an autonomous underwater vehicle. In Proceedings of the OCEANS 2000 MTS/IEEE Conference and Exhibition, Providence, RI, USA, 11–14 September 2000; (Cat. No. 00CH37158). IEEE: New York, NY, USA, 2000; Volume 1, pp. 337–341. [Google Scholar]
- Wang, L.; Wu, Q.; Liu, J.; Li, S.; Negenborn, R.R. State-of-the-art research on motion control of maritime autonomous surface ships. J. Mar. Sci. Eng. 2019, 7, 438. [Google Scholar] [CrossRef]
- Hughes, R.; Balestrini, S.; Kelly, K.; Weston, N.; Mavris, D. Modeling of an integrated reconfigurable intelligent system (IRIS) for ship design. In Proceedings of the 2006 ASNE Ship and Ship Systems Technology (S3T) Symposium, Washington, DC, USA, 18–20 June 2006. [Google Scholar]
- Li, J.; Zhang, G.; Jiang, C.; Zhang, W. A Survey of Maritime Unmanned Search System: Theory, Applications and Future Directions. Ocean Eng. 2023, 285, 115359. [Google Scholar] [CrossRef]
- Zhang, G.; Li, J.; Chang, T.; Zhang, W.; Song, L. Autonomous navigation and control for a sustainable vessel: A wind-assisted strategy. Sustain. Horizons 2024, 13, 100117. [Google Scholar] [CrossRef]
- Liu, R.; Zhang, W.; Zhang, G.; Zhang, X. Disturbance observer-based adaptive neural control for underactuated surface vehicle with constraint of input saturation. Ocean. Eng. 2023, 287, 115744. [Google Scholar] [CrossRef]
- Fossen, T.I.; Breivik, M.; Skjetne, R. Line-of-sight path following of underactuated marine craft. IFAC Proc. Vol. 2003, 36, 211–216. [Google Scholar] [CrossRef]
- Fossen, T.I.; Lekkas, A.M. Direct and indirect adaptive integral line-of-sight path-following controllers for marine craft exposed to ocean currents. Int. J. Adapt. Control. Signal Process. 2017, 31, 445–463. [Google Scholar] [CrossRef]
- Zheng, Z.; Sun, L. Path following control for marine surface vessel with uncertainties and input saturation. Neurocomputing 2016, 177, 158–167. [Google Scholar] [CrossRef]
- Mu, D.; Wang, G.; Fan, Y.; Sun, X.; Qiu, B. Adaptive LOS path following for a podded propulsion unmanned surface vehicle with uncertainty of model and actuator saturation. Appl. Sci. 2017, 7, 1232. [Google Scholar] [CrossRef]
- Fossen, T.I.; Pettersen, K.Y.; Galeazzi, R. Line-of-sight path following for dubins paths with adaptive sideslip compensation of drift forces. IEEE Trans. Control. Syst. Technol. 2014, 23, 820–827. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z. ESO-based line-of-sight guidance law for path following of underactuated marine surface vehicles with exact sideslip compensation. IEEE J. Ocean. Eng. 2016, 42, 477–487. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z. ESO-based line-of-sight guidance law for straight line path following with exact sideslip compensation. In Proceedings of the 2016 12th World Congress on Intelligent Control and Automation (WCICA), Guilin, China, 12–15 June 2016; pp. 677–681. [Google Scholar]
- Liu, L.; Wang, D.; Peng, Z.; Wang, H. Predictor-based LOS guidance law for path following of underactuated marine surface vehicles with sideslip compensation. Ocean. Eng. 2016, 124, 340–348. [Google Scholar] [CrossRef]
- Miao, J.; Wang, S.; Tomovic, M.M.; Zhao, Z. Compound line-of-sight nonlinear path following control of underactuated marine vehicles exposed to wind, waves, and ocean currents. Nonlinear Dyn. 2017, 89, 2441–2459. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, X. A novel DVS guidance principle and robust adaptive path-following control for underactuated ships using low frequency gain-learning. ISA Trans. 2015, 56, 75–85. [Google Scholar] [CrossRef] [PubMed]
- Han, X.; Zhang, X. Tracking control of ship at sea based on MPC with virtual ship bunch under Frenet frame. Ocean. Eng. 2022, 247, 110737. [Google Scholar] [CrossRef]
- Zwierzewicz, Z. Robust and adaptive path-following control of an underactuated ship. IEEE Access 2020, 8, 120198–120207. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Zhang, X.; Zhang, W. Practical multiport event-triggered control for ASV via the intervened LVS guidance. Ocean. Eng. 2022, 263, 112401. [Google Scholar] [CrossRef]
- Warren, C.W. Global path planning using artificial potential fields. In Proceedings of the 1989 IEEE International Conference on Robotics and Automation, Scottsdale, AZ, USA, 14–19 May 1989; pp. 316–317. [Google Scholar]
- Bounini, F.; Gingras, D.; Pollart, H.; Gruyer, D. Modified artificial potential field method for online path planning applications. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 180–185. [Google Scholar]
- Lyu, H.; Yin, Y. COLREGS-constrained real-time path planning for autonomous ships using modified artificial potential fields. J. Navig. 2019, 72, 588–608. [Google Scholar] [CrossRef]
- Li, M.; Li, B.; Qi, Z.; Li, J.; Wu, J. Optimized APF-ACO algorithm for ship collision avoidance and path planning. J. Mar. Sci. Eng. 2023, 11, 1177. [Google Scholar] [CrossRef]
- Zhang, K.; Huang, L.; He, Y.; Wang, B.; Chen, J.; Tian, Y.; Zhao, X. A real-time multi-ship collision avoidance decision-making system for autonomous ships considering ship motion uncertainty. Ocean Eng. 2023, 278, 114205. [Google Scholar] [CrossRef]
- Li, R.; Huang, J.; Pan, X.; Hu, Q.; Huang, Z. Path following of underactuated surface ships based on model predictive control with neural network. Int. J. Adv. Robot. Syst. 2020, 17. [Google Scholar] [CrossRef]
- Johansen, T.; Blindheim, S.; Torben, T.R.; Utne, I.B.; Johansen, T.A.; Sørensen, A.J. Development and testing of a risk-based control system for autonomous ships. Reliab. Eng. Syst. Saf. 2023, 234, 109195. [Google Scholar] [CrossRef]
- Mylonopoulos, F.; Polinder, H.; Coraddu, A. A comprehensive review of modeling and optimization methods for ship energy systems. IEEE Access 2023, 11, 32697–32707. [Google Scholar] [CrossRef]
- Bozkurt, B.; Ertogan, M. Heave and horizontal displacement and anti-sway control of payload during ship-to-ship load transfer with an offshore crane on very rough sea conditions. Ocean Eng. 2023, 267, 113309. [Google Scholar] [CrossRef]
- Sezer, S.I.; Ahn, S.I.; Akyuz, E.; Kurt, R.E.; Gardoni, P. A hybrid human reliability analysis approach for a remotely-controlled maritime autonomous surface ship (MASS-degree 3) operation. Appl. Ocean. Res. 2024, 147, 103966. [Google Scholar] [CrossRef]
- Sharma, S.K.; Kumar, N.; Avesh, M.; Sharma, R.C.; Siddiqui, M.I.H.; Lee, J. Navigating Tranquillity with H ∞ Controller to Mitigate Ship Propeller Shaft Vibration. J. Vib. Eng. Technol. 2024, 1–11. [Google Scholar] [CrossRef]
- Jurdjevic, V. Geometric Control Theory; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar]
- Sun, Z.; Fan, Y.; Wang, G. An Intelligent Algorithm for USVs Collision Avoidance Based on Deep Reinforcement Learning Approach with Navigation Characteristics. J. Mar. Sci. Eng. 2023, 11, 812. [Google Scholar] [CrossRef]
- Di Ciaccio, F.; Russo, P.; Troisi, S. Does: A deep learning-based approach to estimate roll and pitch at sea. IEEE Access 2022, 10, 29307–29321. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, W.; Liu, J.; Sun, C. Cooperative USV–UAV marine search and rescue with visual navigation and reinforcement learning-based control. ISA Trans. 2023, 137, 222–235. [Google Scholar] [CrossRef]
- Fan, Y.; Sun, Z.; Wang, G. A novel intelligent collision avoidance algorithm based on deep reinforcement learning approach for USV. Ocean Eng. 2023, 287, 115649. [Google Scholar] [CrossRef]
- Dong, W.; Guo, Y. Global time-varying stabilization of underactuated surface vessel. IEEE Trans. Autom. Control. 2005, 50, 859–864. [Google Scholar] [CrossRef]
- Godhavn, J.M.; Fossen, T.I.; Berge, S.P. Non-linear and adaptive backstepping designs for tracking control of ships. Int. J. Adapt. Control. Signal Process. 1998, 12, 649–670. [Google Scholar] [CrossRef]
- Jiang, Z.P. Global tracking control of underactuated ships by Lyapunov’s direct method. Automatica 2002, 38, 301–309. [Google Scholar] [CrossRef]
- Dong, S.; Shen, Z.; Zhou, L.; Yu, H. Nonlinear gain-based event-triggered tracking control of a marine surface vessel with output constraints. Ocean Eng. 2022, 262, 112144. [Google Scholar] [CrossRef]
- Aschemann, H.; Wirtensohn, S.; Reuter, J. Nonlinear observer-based ship control and disturbance compensation. IFAC-PapersOnLine 2016, 49, 297–302. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, H.; Fu, M. Prescribed performance trajectory tracking control of dynamic positioning ship under input saturation. Trans. Inst. Meas. Control. 2022, 44, 30–39. [Google Scholar] [CrossRef]
- Shan, Q.; Wang, X.; Li, T.; Chen, C.P. Finite-time control for USV path tracking under input saturation with random disturbances. Appl. Ocean. Res. 2023, 138, 103628. [Google Scholar] [CrossRef]
- Izadi-Zamanabadi, R.; Blanke, M. A ship propulsion system as a benchmark for fault-tolerant control. Control. Eng. Pract. 1999, 7, 227–239. [Google Scholar] [CrossRef]
- Blankem, M. Diagnosis and fault-tolerant control for ship station keeping. In Proceedings of the 2005 IEEE International Symposium on, Mediterrean Conference on Control and Automation Intelligent Control, Limassol, Cyprus, 27–29 June 2005; pp. 1379–1384. [Google Scholar]
- Zhao, Z.; Yang, Y.; Zhou, J.; Li, L.; Yang, Q. Adaptive fault-tolerant PI tracking control for ship propulsion system. ISA Trans. 2018, 80, 279–285. [Google Scholar] [CrossRef]
- Zhang, J.X.; Yang, G.H. Fault-tolerant fixed-time trajectory tracking control of autonomous surface vessels with specified accuracy. IEEE Trans. Ind. Electron. 2019, 67, 4889–4899. [Google Scholar] [CrossRef]
- Guo, B.; Chen, Y. Fuzzy robust fault-tolerant control for offshore ship-mounted crane system. Inf. Sci. 2020, 526, 119–132. [Google Scholar] [CrossRef]
- Hu, X.; Gong, Q.; Han, J.; Zhu, X.; Yang, H.; Wang, M. Dynamic event-triggered composite anti-disturbance fault-tolerant tracking control for ships with disturbances and actuator faults. Ocean Eng. 2023, 280, 114662. [Google Scholar] [CrossRef]
- Cheliotis, M.; Lazakis, I.; Theotokatos, G. Machine learning and data-driven fault detection for ship systems operations. Ocean Eng. 2020, 216, 107968. [Google Scholar] [CrossRef]
- Zhou, X.; Wu, Y.; Huang, J. MPC-based path tracking control method for USV. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 1669–1673. [Google Scholar]
- Lin, M.; Zhang, Z.; Pang, Y.; Lin, H.; Ji, Q. Underactuated USV path following mechanism based on the cascade method. Sci. Rep. 2022, 12, 1461. [Google Scholar] [CrossRef] [PubMed]
- Gong, C.; Su, Y.; Zhang, D. Variable gain prescribed performance control for dynamic positioning of ships with positioning error constraints. J. Mar. Sci. Eng. 2022, 10, 74. [Google Scholar] [CrossRef]
- Zhang, Z.; Gao, Y.; Bian, J.; Wu, Y. Event-triggered fixed-time tracking of state-constrained surface ships under actuation saturation with prescribed control performance. Ocean Eng. 2023, 281, 114784. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, Q.; Zhao, E.; Liu, Y.; Zhang, Y. Automatic berthing of unmanned surface vessels with predetermined performance. Sci. Rep. 2024, 14, 6636. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Cabecinhas, D.; Pascoal, A.; Zhang, W. Prescribed performance path following control of USVs via an output-based threshold rule. IEEE Trans. Veh. Technol. 2024, 73, 6171–6182. [Google Scholar] [CrossRef]
- Jin, X.; Xu, J.X. Iterative learning control for output-constrained systems with both parametric and nonparametric uncertainties. Automatica 2013, 49, 2508–2516. [Google Scholar] [CrossRef]
- Zhang, G.; Shang, X.; Liu, J.; Zhang, W. Improved iterative learning path-following control for USV via the potential-based DVS guidance. Ocean Eng. 2023, 280, 114543. [Google Scholar] [CrossRef]
- Wu, X.; Miao, X.; Wang, W.; He, D. Self-tuning iterative learning control for an USV: Application to an autonomous berthing operation with an avoidance obstacle mechanism. Ocean Eng. 2024, 301, 117548. [Google Scholar] [CrossRef]
- Zhang, G.; Shang, X.; Li, J.; Huang, J. A Novel Dynamic Berthing Scheme for An USV: DPFS Guidance and Two-dimensional Event Triggering ILC. IEEE Trans. Intell. Veh. 2024, 1–12. [Google Scholar] [CrossRef]
- Liu, C.; Gao, J.; Zhang, G.; Xu, D. Robust event-triggered model predictive control for straight-line trajectory tracking of underactuated underwater vehicles. In Proceedings of the OCEANS 2017—Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–5. [Google Scholar]
- Wang, L. Composite error event-triggered-based finite-time safe formation control of underactuated vessels. Ocean Eng. 2024, 310, 118629. [Google Scholar] [CrossRef]
- Li, M.; Li, T.; Gao, X.; Shan, Q.; Chen, C.P.; Xiao, Y. Adaptive NN event-triggered control for path following of underactuated vessels with finite-time convergence. Neurocomputing 2020, 379, 203–213. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Zhang, X.; Zhang, W. Event-triggered robust adaptive control for path following of the URS in presence of the marine practice. Ocean Eng. 2021, 242, 110139. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, L.; Li, J.; Zhang, W. Improved LVS guidance and path-following control for unmanned sailboat robot with the minimum triggered setting. Ocean Eng. 2023, 272, 113860. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Zhang, X.; Zhang, W. Integrating dynamic event-triggered and sensor-tolerant control: Application to USV-UAVs cooperative formation system for maritime parallel search. IEEE Trans. Intell. Transp. Syst. 2024, 25, 3986–3998. [Google Scholar] [CrossRef]
- Singh, Y.; Sharma, S.; Sutton, R.; Hatton, D. Optimal Path Planning of an Unmanned Surface Vehicle in a Real-Time Marine Environment Using a Dijkstra Algorithm; Marine Navigation CRC Press: Boca Raton, FL, USA, 2017; pp. 399–402. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).