1. Introduction
The ‘Fourth Industrial Revolution’, also known as ‘Industry 4.0’, is a concept that describes the rapid change in technology and industries as a result of growing interconnectivity and intelligent automation. It is driven by emergent and disruptive intelligence and information technologies that significantly influence the industry, social, and environmental sustainable development [
1]. Industry 4.0 technologies, including but not limited to artificial intelligence, big data analytics, cloud computing and the internet of things (IoT), improve the levels of current production efficiencies, quality, and industrial system sustainability [
2,
3]. For example, different from traditional manufacturing practices, the IoT enables machine-to-machine communication and automates the production process. The production data are collected from the sensors and analyzed via big data analytics. The whole manufacturing system is integrated with increasing automation, communication, and self-monitoring even without requiring human involvement.
The key point of the example above is the IoT technique, which uses wireless devices to connect the machines digitally and uses sensors to monitor physical and environmental phenomena and exchange data. Numerous wireless devices form a wireless network for automation and data transmission in the manufacturing process. However, the battery-powered wireless nodes or sensors limit the operational time and performance of the system. Manual battery recharging may not be viable technically and economically. Therefore, various energy harvesting technologies, which are utilized to transform various types of ambient energy into electricity, have emerged as potential strategies to develop self-sustaining wireless networks since the 2000s [
4,
5]. For instance, piezoelectric, electrostatic, and electromagnetic energy harvesters are categorized as vibration-based energy harvesters, which convert vibrations in a sensor’s operating environment into electrical energy [
6,
7,
8]. In this paper, we aim to present a case study of modeling and simulation of an electromagnetic energy harvester.
Numerical modeling and computer-based simulation enhance the energy harvesters’ design process. Simulating the numerical models reduces the cost of fabricating prototypes and thereby speeds up the design optimization process. In this work, we reproduce the electromagnetic energy harvester model [
9] in the finite element method (FEM)-based software. It is found that the high computational costs of the finite element (FE) model are directly determined by the total number of elements. A refined mesh with a large number of elements makes the FE model less efficient to be used in system-level simulations. Therefore, the goal of this work is to provide strategies to speed up the simulation of the model, enable efficient parametric optimization, and realize the co-simulation with the control circuitry.
Recently, several advances of system-level modeling have been reported [
10,
11]. Different from the lumped-element equivalent circuit model constructed based on the derived analytical equations [
10] and the macromodel extracted via system model identification method [
11], in this contribution, we present the workflow of exporting a look-up table-based equivalent circuit model from an electromagnetic energy harvester model via the equivalent circuit extraction (ECE) technique [
12,
13]. This equivalent circuit model can be imported into the system-level simulation software for efficient simulations. The interconnection of the equivalent circuit to both electrical and mechanical components at the system-level is demonstrated.
However, the generation of the equivalent circuit model is based on a parametric solution of the full-order FE model and it is still time-consuming. To generate the compact models of electromagnetic devices, model order reduction techniques have been receiving a growing amount of interest in the last decades [
14,
15,
16,
17,
18]. In addition, the authors in [
19] implemented the parametric model order reduction (pMOR) method on electromagnetic systems to generate a parametric reduced-order model with parameterized material properties and boundary conditions. In this contribution, in order to speed up the parametric studies of a geometrically parameterized electromagnetic energy harvester model, we adapted two alternative pMOR methods for effective parametric studies of the reduced-order model (ROM). One method is referred to as the matrix-interpolation-based pMOR method suggested by Panzer et al. [
20]. The general framework of this pMOR method is that several values of the geometrical parameter are selected and the corresponding FE models are reduced via model order reduction methods, e.g., the Block Arnoldi algorithm from [
21], and are noted as local ROMs. The parametric reduced-order model (pROM) is then interpolated on the basis of these local ROMs. The other method is introduced by Moosmann in [
22,
23], which enables the users to extract the geometrical parameter out of the system matrices of the FE full-order model (FOM) via algebraic parameterization. Then, the projection-based multivariate-moment matching pMOR method [
24,
25], which is successfully demonstrated for material properties and boundary conditions in thermal problems [
26,
27,
28], can be applied directly. It is verified in this work that this method is also applicable to geometry parameters.
For the first time, in this work, we compare the computational efficiencies of these two pMOR methods and the performance of the pROMs. Both methods are first implemented on a two-dimensional (2D) single permanent magnet model, then on a three-dimensional (3D) electromagnetic energy harvester FE model. It should be noted that the precondition for both methods is that the topology of the mesh should be preserved when changing the geometry parameter. In this work, this is achieved via scaling the elements in the mesh. It is found that when the dimension of the FOM becomes sizeable, the method suggested by Moosmann encounters its limitation and the algebraic parameterization process requires substantial computational effort. Thereby, a new workflow for the algebraic parameterization process is suggested in this work.
The structure of this paper is as follows. In
Section 2, the setups of the electromagnetic energy harvester model are introduced. The ECE technique and system-level simulation are presented in
Section 3. Then,
Section 4 introduces the parametric model order reduction methods utilized in this work. In
Section 5, the numerical results of the pMOR methods applied to the electromagnetic energy harvester model are presented and discussed. The conclusion of this work and the outlook for future research are given in
Section 6.
2. Case Study: Electromagnetic Energy Harvester
An electromagnetic energy harvester transforms vibrational mechanical energy from the environment into electrical energy. In this work, we reproduce the electromagnetic energy harvester model [
9] in the FE software ANSYS Maxwell 3D [
29].
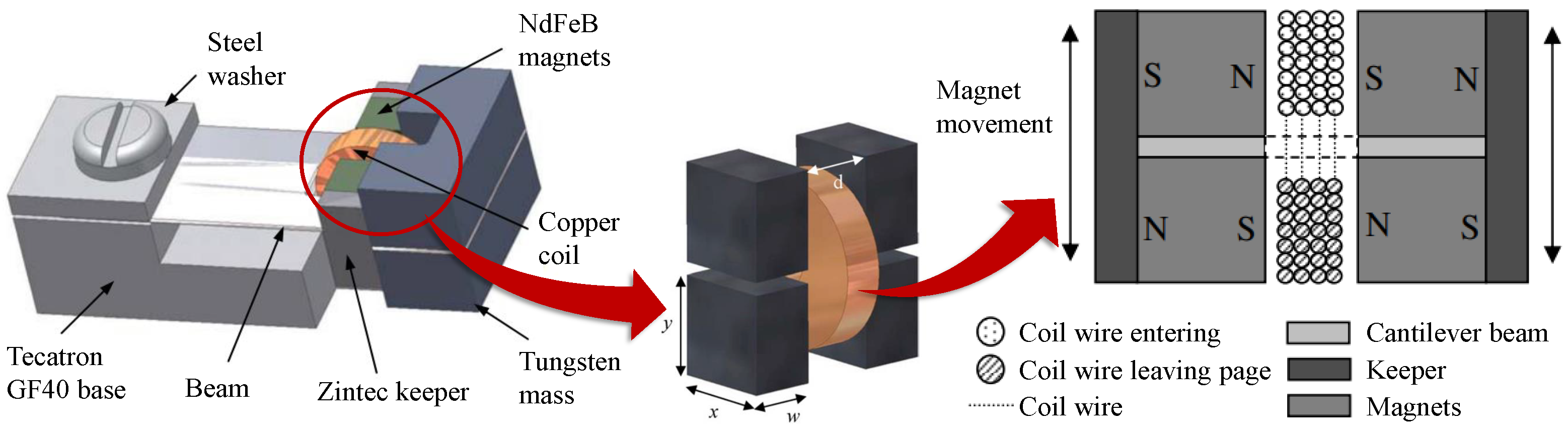
Figure 1 illustrates the structure of the model. Four high-energy density sintered rare earth neodymium iron boron (NdFeB) magnets are arranged along with a copper coil. The characteristics of the materials used in the model are presented in
Table 1. Two magnets are attached to the top and bottom sides of a 0.1 mm thick cantilever beam on either side of the coil. The distance
d between the magnets on two sides of the coil is 1 mm. The magnets are 1 × 1 × 1.5 mm
in size and polarized along the edge
w = 1.5 mm. The coil volume in the middle of the structure has an outside radius of 1.2 mm and an inside radius of 0.3 mm. The coil thickness is 0.5 mm. It is configured with 600 turns of 25 μm diameter copper wire. With this arrangement, a concentrated flux gradient through the stationary coil is produced as the magnets oscillate together with the cantilever. The changing magnetic field through the coil induces a voltage in the coil, which is utilized as a power supply.
In this work, four magnets and the coil were constructed as shown in
Figure 2. The two magnets on each side of the coil were grouped and moved in a 9 × 4.8 × 8.2 mm
motion band in the z-direction between −0.57 and 0.57 mm. The initial resting position was at −0.57 mm. In order to establish the oscillation of the magnets, a time-dependent force was applied to each group of magnets:
where
m = 22.2 μg is the mass of two magnets,
= 2
with
f = 60 Hz is the excitation frequency and the designated oscillation amplitude is
= 0.57 mm. The coil terminals, which were connected to an external circuit, were defined on the cross-section area of the coil. In this case study, the external circuit was composed of a coil inductor, a 100
coil internal resistor, and a 10 G
large load resistor. In this way, the open circuit voltage induced in the coil can be observed. There was no current/voltage excitation defined to the coil. More details of the model setups are given in [
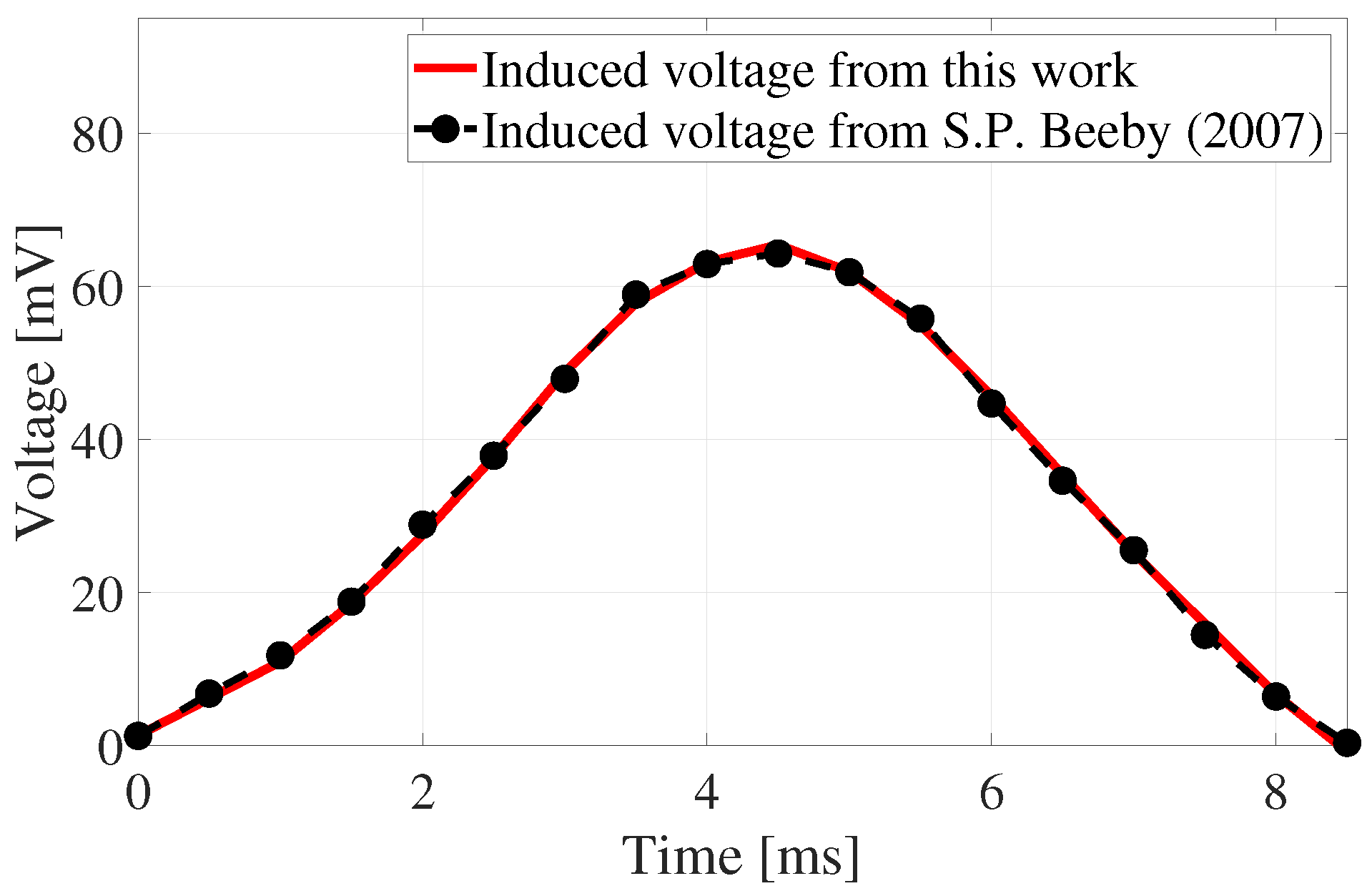
13]. Thereby, the induced voltage in the coil as obtained from this work is presented in
Figure 3. The maximum voltage output during transient analysis is 65.4 mV, which is close to the simulation finding of 64 mV from [
9] with a relative error of 2.2%.
3. Equivalent Circuit Extraction Technique
In the validated electromagnetic energy harvester model built in this work, the coil was connected to an external electrical circuit at the system-level, where the induced voltage output from the coil served as a voltage source. However, a total of 125,821 elements were generated in the mesh of the FE model. In each time point of the transient analysis, the model is remeshed in respect to the change of the position of the magnets. It took around 135 min to perform the transient simulation over the period of 8.5 ms with a time step 0.5 ms (Intel Core Processor (Broadwell, IBRS) 3.0 GHz, 64 GB RAM). Therefore, to reduce the computational cost, a compact model must be generated from the 3D FE electromagnetic energy harvester model for efficient system-level simulations. In this section, we will introduce the equivalent circuit extraction technique in ANSYS Maxwell 3D, which enables us to generate an equivalent circuit model from the original FE electromagnetic energy harvester model for fast simulations at the system-level [
12,
13].
However, due to technical reasons [
12], the equivalent circuit model can be exported from a parametric solution with magnetostatic analysis, whereas in
Section 2 a transient scheme was implemented. Thereby, the positions of the magnets were parameterized to represent the oscillation of the magnets already used in the transient analysis. By using Faraday’s law of induction [
30], the induced voltage output was calculated via the obtained magnetic flux rate change through the coil:
where
N is the number of turns in the coil,
is the change in the magnetic flux through the coil in each time step
. The negative sign in the equation indicates that the induced electromotive force (
) opposes the change in the magnetic flux.
The parametric simulation results were pre-calculated and saved as a look-up table in the equivalent circuit model (see
Figure 4). In this look-up table, the positions of the magnets and the current in the coil were used as the inputs and the magnetic flux through the coil was the output. The interpolation method was deployed to calculate the magnetic flux outputs from those input values which were not listed in the parametric solution results-based look-up table. The equivalent circuit model was further able to be imported into the system-level simulation software and enable the connection to both electrical and mechanical circuits for real-time system-level simulations.
The system-level simulation tool ANSYS Twin Builder [
31] can load the equivalent circuit model. In
Figure 4, on the right-hand side of the equivalent circuit model, the dynamics of the harvester are imitated by lumped elements in the mechanical circuit. The inertia of the magnets is represented by the mass component. Position source, damping, and spring components determine the excitation applied to the magnets. On the left-hand side, a simple load circuit, which is composed of a load resistor and a coil inductor, is connected to the equivalent circuit model.
In the mechanical circuit,
m = 22.2 μg is the mass component, which presents the mass of two magnets on one side of the coil. It is excited with an excitation frequency
f = 60 Hz. The spring rate is calculated as:
The excitation amplitude can be calculated as follows:
where
= 0.59 m/s
is the acceleration amplitude. In order to obtain the designated oscillation amplitude, the damping coefficient is chosen to be 6.8 × 10
Ns/m. Given a peak displacement amplitude of 0.57 mm, the quality factor of the harvester model becomes 137.3.
In the electrical circuit, the resistance of the load resistor is defined as 10 G
, which sets an open circuit condition. The induced voltage in the coil obtained from the equivalent circuit model is shown in
Figure 5. The maximum voltage output is around 65.5 mV, which is close to the expected value of 64 mV. It could also be found in
Table 2 that the computational time for the simulation of the equivalent circuit model is much faster than the finite element model. It took only 19 s to perform the simulation of the equivalent circuit model with a simulation period of 3.5 s and time step 1 μs, while it took around 135 min to run the simulation of the full-scale FE model with a simulation period of 8.5 ms and time step 0.5 ms.
Then, the parametric studies of the load resistance in the electrical circuit could be performed efficiently on the basis of the equivalent circuit model. As shown in
Figure 6, the maximum power output of 4.28 μW is obtained when the load resistance matches the internal resistance of the coil.
4. Parametric Model Order Reduction
Although the equivalent circuit model enables efficient system-level simulation, generation of the equivalent circuit model required 244 min as shown in
Table 2. This effort stems from the necessity to solve 325 parameter sets of the full-scale FE electromagnetic energy harvester model. In this case study, the position of the magnets was parameterized between −0.6 and 0.6 mm with a step size of 0.05 mm; the coil current is parameterized between −0.6 and 0.6 mA in steps of 0.1 mA.
For design optimization of the device, parametric studies of the original FE model with geometrical parameters are necessary. In this section, we therefore suggest using pMOR methods to reduce the computational effort of parametric studies. More specifically, pMOR methods will enable us to parameterize the geometrical parameters of the electromagnetic energy harvester model at the reduced-order model level. These parametric solutions calculated from the pROM can be saved as a look-up table, which can be used to construct the equivalent circuit model for system-level simulations. Moreover, the pROM can be transformed into a system-level model, e.g., a VHDL model, with conservative ports. This could be performed and must be validated in the future.
4.1. Finite Element Model
pMOR methods require system matrices of the FE model. To our best knowledge, there is no way to obtain the system matrices from ANSYS Maxwell 3D. Therefore, we implemented the model in ANSYS Mechanical APDL [
32], where the system matrices could be obtained via the software ‘Model Reduction inside ANSYS’ [
33].
In this case, the magnetostatic model was simulated without current input to the coil. Therefore, the system can be represented by the subset of Maxwell’s equations [
34]:
where
is the magnetic field intensity,
is the magnetic flux density and
= 0 is the applied source current. When permanent magnets are considered, a magnetization vector field
is introduced and it relates to the magnetic field intensity
and magnetic flux density
as follows:
where
is the permeability of free space.
In ANSYS Mechanical APDL, the magnetostatic system can be solved by using either
Magnetic scalar potential: the magnetic field intensity
can be expressed as a negative gradient of the scalar potential
:
In Equation (
7), replace
by Equation (
8) and take Equation (
7) into Equation (6):
Magnetic vector potential: the magnetic flux density
is defined as a curl of the vector potential
:
Replace
in Equation (
7) by Equation (
10) and take it into Equation (
5), we obtain:
After finite element discretization, both Equations (
9) and (
11) can be written in the matrix form as follows:
where
is the coefficient matrix with dimension
n.
is the input matrix with
m inputs and
is the output matrix and it gives
p outputs.
x is the unknown state vector which contains the magnetic scalar potential
or vector potential
.
y is the output vector and
is the input vector, which is constructed by the coercive force properties of the permanent magnets and defines the polarization direction.
4.2. Matrix Interpolation Based pMOR
If a geometrical parameter
l is introduced to the FE model, the system matrices will all become dependent on it. Then, the system in Equation (
13) could be written in geometrical parameter-dependent form as follows:
The matrix-interpolation-based pMOR method suggested by Panzer et al. [
20] derives a pROM of such a FE model with geometrical parameters. In this subsection, we will briefly review and discuss this method. The following steps make up the basic framework for pMOR by matrix interpolation and will be applied to the case study in this work:
Step 1.
k values of the geometrical parameter
are selected and the corresponding full-scale models are reduced and stored in the database
:
where
,
and
are the reduced system matrices at those discrete parameter values
.
are the corresponding reduced order state vectors.
with
are the local projection matrices.
Step 2. These local ROMs are transformed into another set of generalized coordinates
as follows:
where the transformation matrices are defined as
and
. Matrix
is constructed by performing the singular value decomposition (SVD) on the matrix pool of the local projection matrices
and choosing the first
r columns of
U:
Step 3. The system matrices of the global pROM are constructed through a weighted interpolation method based on the system matrices obtained from the local ROMs
. In this work, the Lagrange interpolation strategy [
35] was utilized to calculate the pROM with parameter
l:
where:
It should be noted that, in Step 1, the computational cost for generating a ROM from a static model is almost equivalent to its solution due to the fact that the local projection matrices
are calculated via the modified Gram-Schmidt algorithm [
36] on the term
. However, the approach of matrix interpolation-based pMOR still reduces the computational time because the step of interpolating the local ROMs is faster than directly solving the static model at that discrete point.
In addition, the matrix interpolation-based pMOR method has an essential prerequisite that the mesh topology of the local FE models should be constant. In other words, the dimension of the local projection matrices should be the same. Otherwise, the SVD of the matrix pool will not be viable in Step 2. In this contribution, we implemented a scheme in ANSYS Mechanical APDL to scale the mesh elements to preserve the mesh topology. Other research related to matrix interpolation-based pMOR methods with changing mesh topology is given in [
28,
37,
38,
39].
4.3. Algebraic Parameterization-Based pMOR
Another pMOR method applicable to geometrically parameterized FE models is suggested in [
22,
23]. The authors introduced an approach for the algebraic parameterization of FE models with varying geometrical parameters. In this subsection, we shall introduce this method and indicate its limitation. We will suggest an improved workflow of this method in this paper.
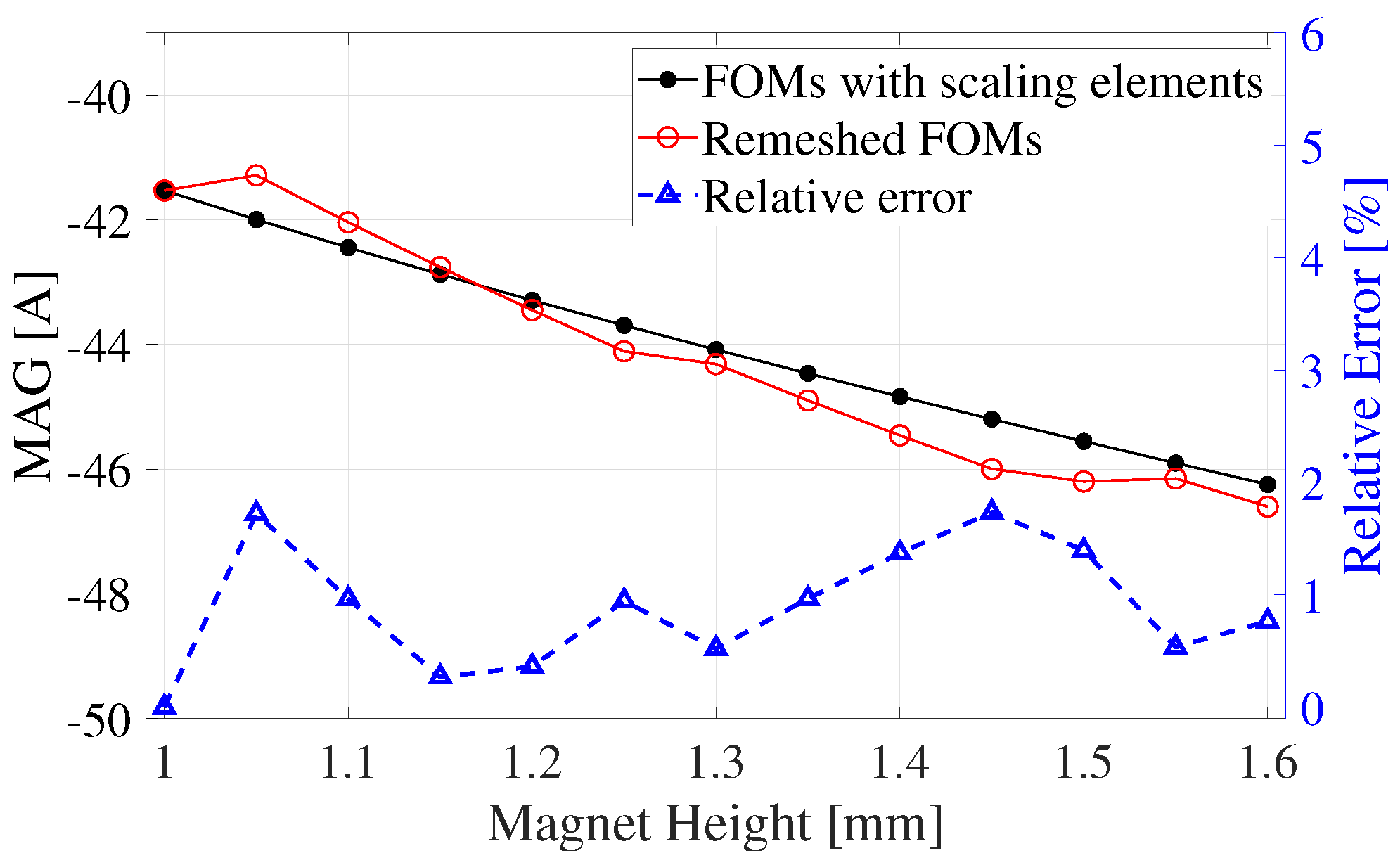
Similar to matrix interpolation-based pMOR, this method is applicable only if the mesh topology, i.e., the matrix structure, remains unchanged. Varying the geometrical parameter could be achieved by scaling the size of the elements as shown in
Figure 7.
This method follows the following steps:
Step 1. The geometrical parameter-dependent Equation (
13) is extended to a parametric form:
where
is the scaling factor for the geometrical parameter
l, e.g., the height of the magnets. The parameter-independent system matrices
,
, and
can be computed through the following numerical scheme:
where
are the system matrices snapshotted with different values of
.
are the identified scaling factors of the elements.
Step 2. Equation (
19) is constructed and solved for each matrix entry, that is
times.
n is the dimension of the system matrix. The solution of
,
, and
assembles the desired parameter-independent matrices.
Step 3. On the basis of Equation (
18), the multivariate moment-matching-based pMOR method can be applied to generate a parametric ROM:
where
,
, and
are the reduced system matrices.
is a global projection matrix obtained by merging two local projection matrices of parameter
and
. According to our previous research [
28], for the parametric static model, the local projection matrices can be constructed by orthogonalizing the Krylov subspaces of each parameter:
where
.
and
are the fixed expansion points with respect to each parameter. In this case study, we select
and
. Then, matrix
is the snapshotted matrix at
.
It is worth noting that in Step 2, the authors in [
22,
23] did not mention any efficient way to solve Equation (
19)
times when the dimension
n of the FE model is significantly large. In this work, we introduced a new workflow to calculate these parameter-independent system matrices through rewriting Equation (
19) in matrix form:
The linear equations in (
24) can be solved symbolically and the parameter-independent matrices are then analytically expressed as weighted sums of the snapshot matrices:
where
,
, are the coefficients calculated based on the scaling factors. In this way, Equation (
24) needs to be solved only once and the computational cost for the matrix-scalar multiplication and matrix summation is low due to the fact that only
non-zero elements from the sparse system matrices are calculated. The comparison of the computational complexity of the original and improved methods is presented in
Table 3.
6. Conclusions and Outlook
In this work, we reproduced the electromagnetic energy harvester model proposed in [
9]. On the basis of that model, we demonstrated that an equivalent circuit model can be generated from the electromagnetic energy harvester model via the ECE technique. We conclude that the equivalent circuit model can be used to replace the full model for the simulations at the system-level.
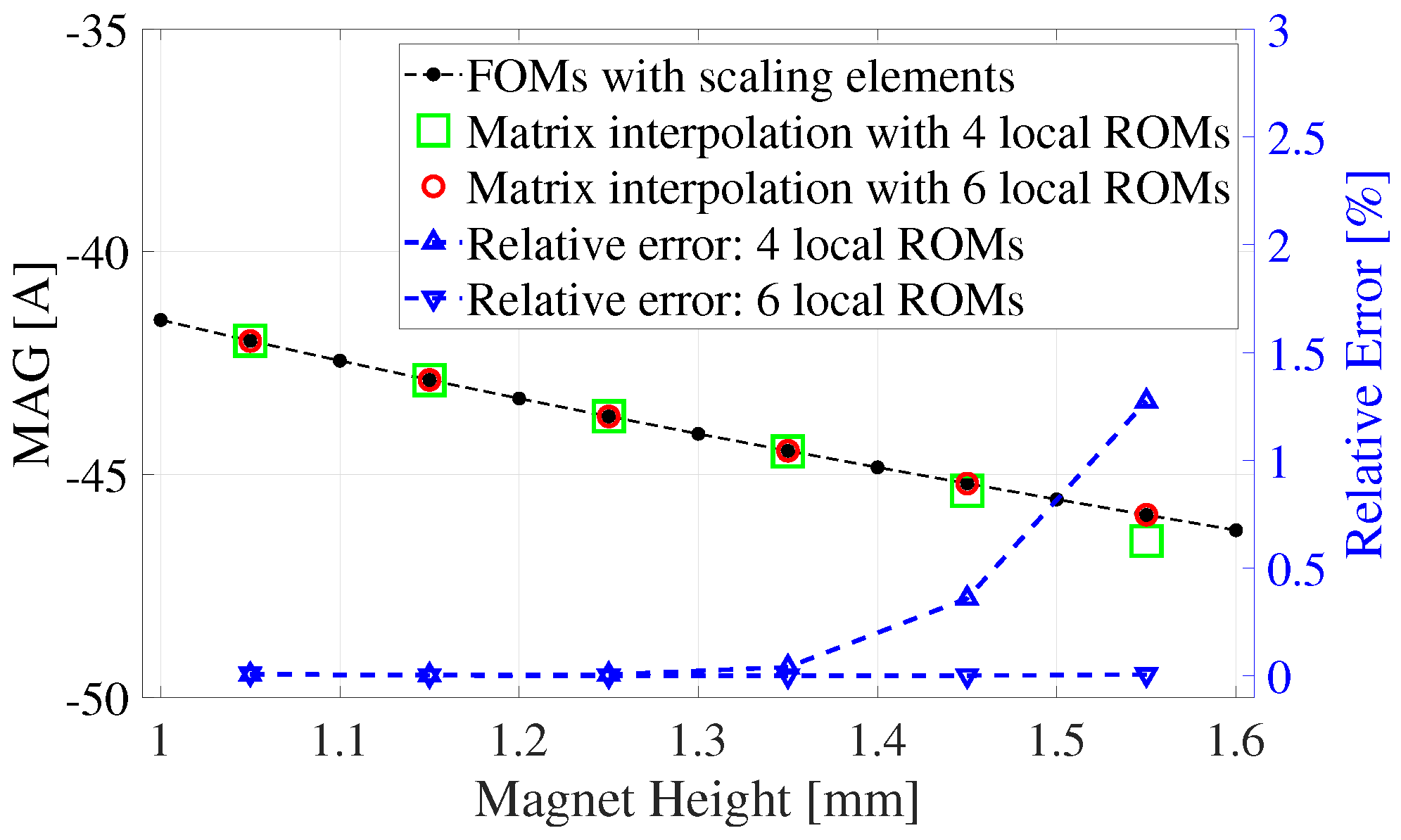
In addition, we implemented the matrix interpolation-based and algebraic parameterization-based pMOR methods to generate the geometrical parameter-independent pROMs. The position and the size of the magnet were parameterized, respectively. These two methods were first implemented on a 2D permanent magnet model to compare their computational cost and the performance of the pROMs. It was found that when sharing the same number of local ROMs and snapshot system matrices, the matrix interpolation-based pMOR method was able to generate the pROM more efficiently and the algebraic parameterization-based pMOR method gave a more accurate pROM, even in a large parameter range. Both methods were able to construct precise geometrical parameter-dependent pROMs. Then these two methods were further applied to the 3D electromagnetic energy harvester model. However, when the algebraic parameterization-based pMOR method was applied, we found that the generated reduced system matrix was singular and the pROM was unsolvable. Further research is required on this topic.
Recently, the authors in [
40] suggested a new workflow for constructing a pROM of the electromagnetic system, where the position of the magnets is parameterized. Instead of scaling the elements, the model is separated into moving and non-moving parts while the mesh topology of both parts is kept constant. Future research work will evaluate and adapt this method to the electromagnetic energy harvester model.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}