
Swarm Exploration and Communications: A First Step towards Mutually-Aware Integration by Probabilistic Learning

 , , , , and
, , , , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- How to integrate exploration and communication into a single framework?
- How to ensure mutual awareness? In other words, which information is appropriate to be exchanged between the agents and how can it be exploited?
Main Contribution
- Modeling of the physical process by means of Factor Graphs (FGs) and design of ML-based “communication-aware” swarm exploration algorithms that follow active inference principles [10].
- Investigation and design of “exploration-aware” wireless communication methods and algorithms in the framework of ML. Here, we focus on the meaning, i.e., semantics, of the messages to be transmitted between robots instead of the raw data. To link exploration to communication, a promising approach is the framework of semantic communication [5,6,7,8,9] and in particular [11], as it may enable a tight integration.
2. State-of-the-Art
2.1. Distributed Multi-Agent Exploration
2.2. Machine Learning for Communications
Semantic Communication
- How accurately can the symbols of communication be transmitted? (The technical problem).
- How precisely do the transmitted symbols convey the desired meaning? (The semantic problem).
- How effectively does the received meaning affect conduct in the desired way? (The effectiveness problem).
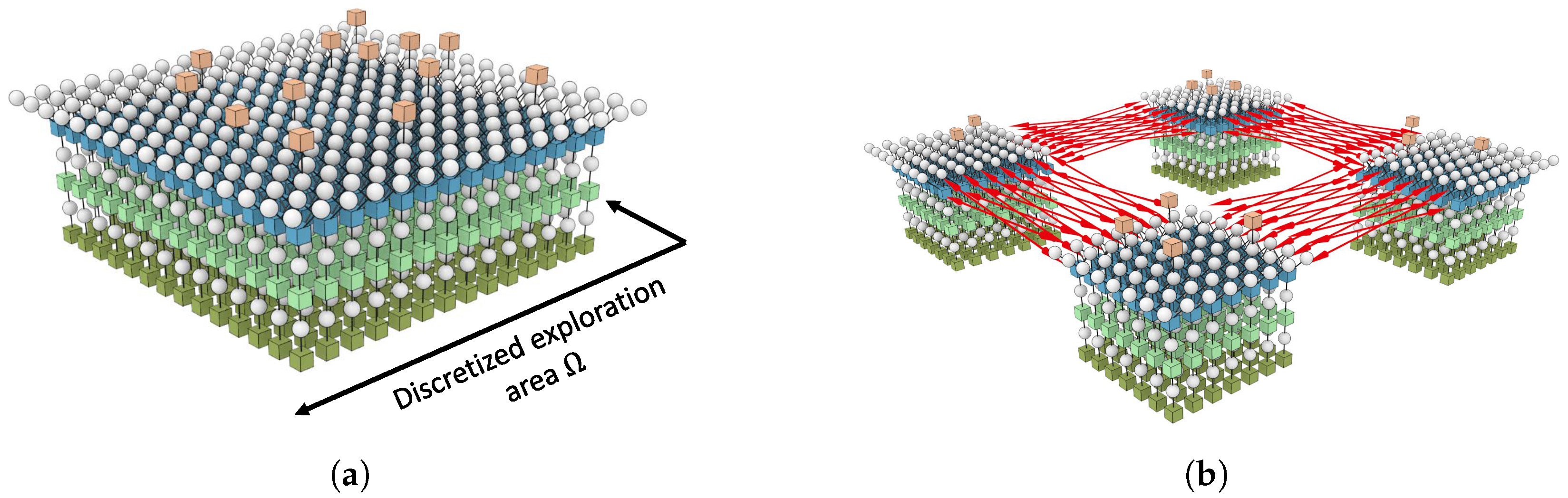
3. Distributed Exploration Problem
4. Proposed Framework
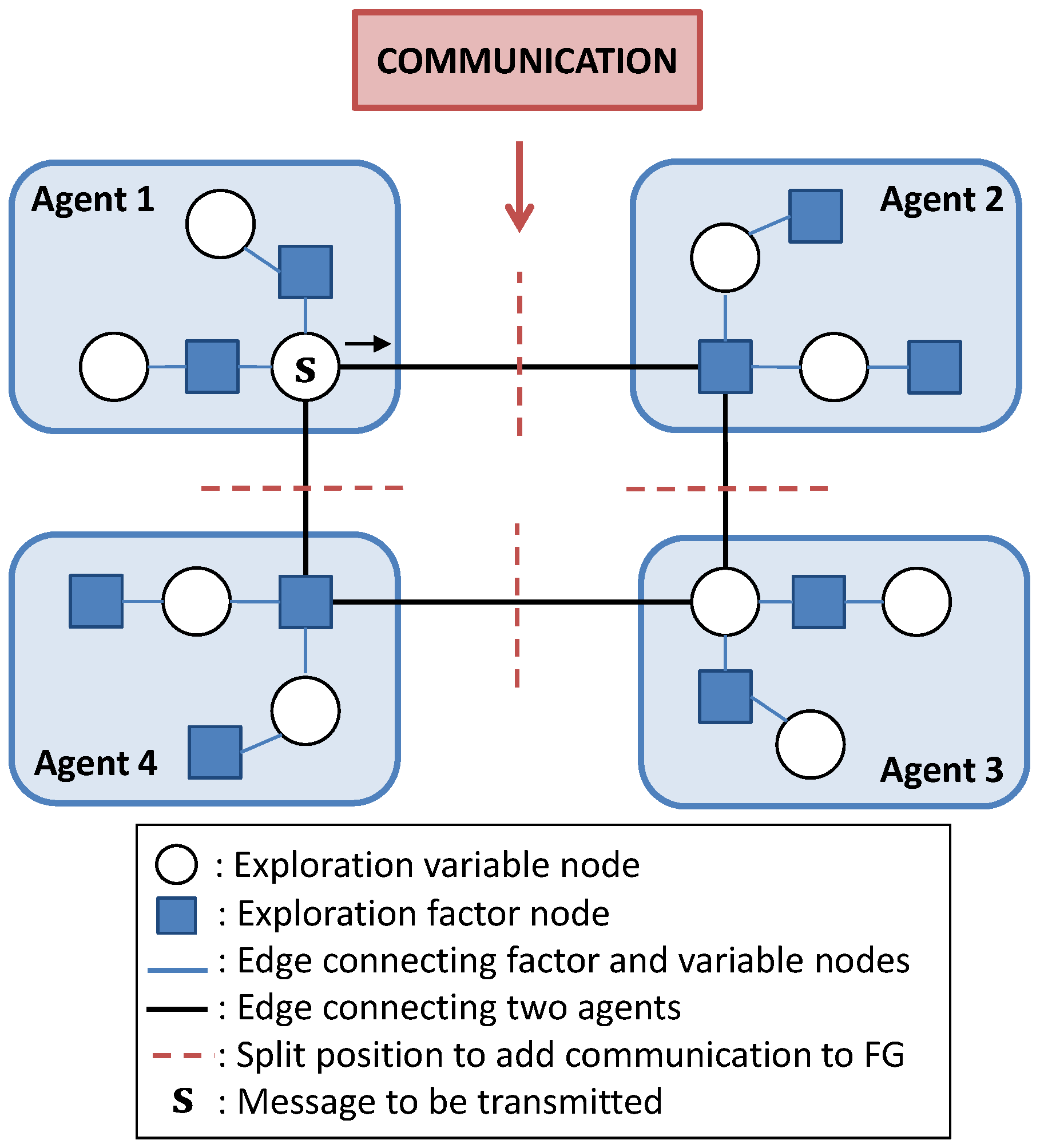
4.1. Design Approach: Factor Graphs
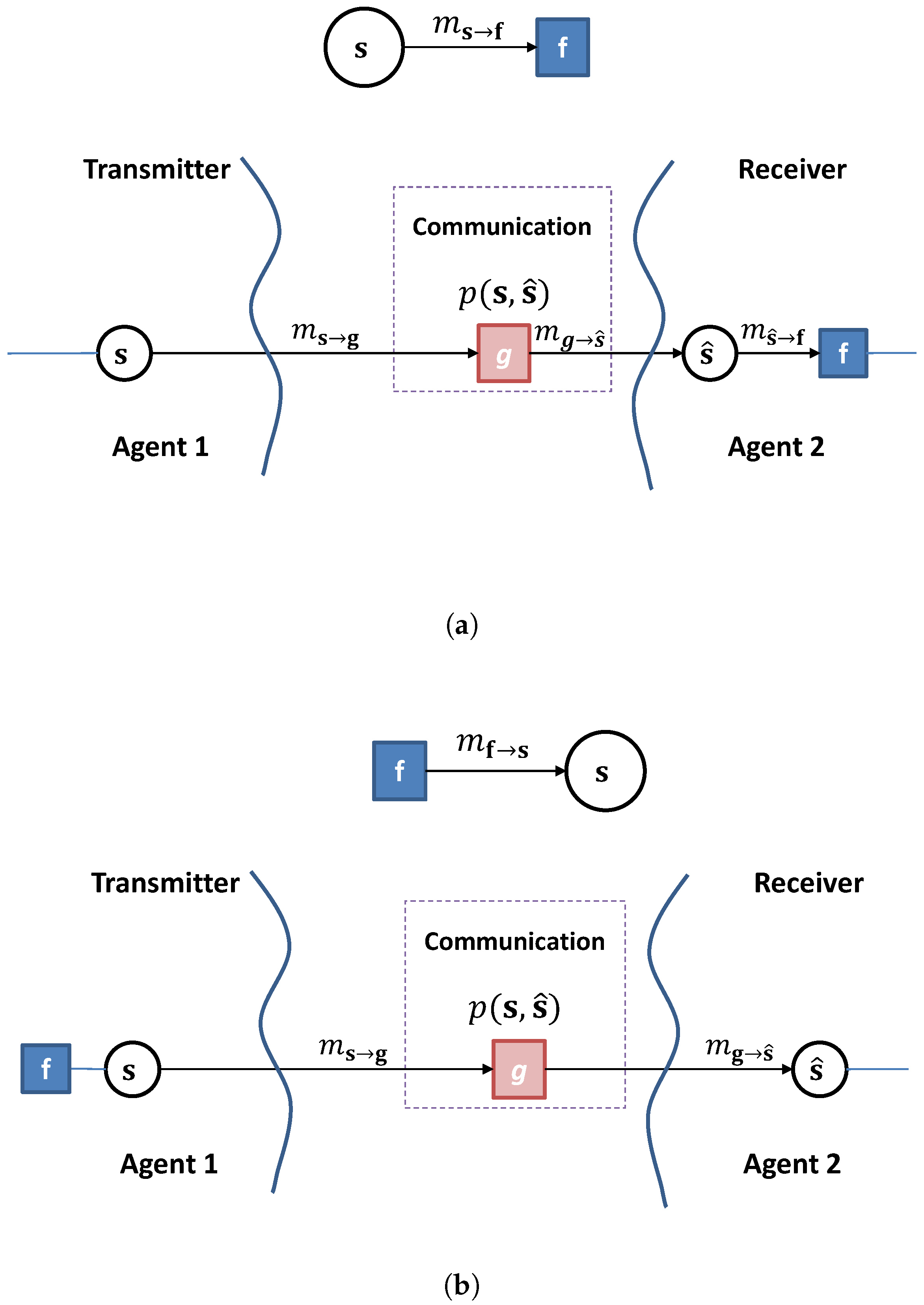
4.2. Integration of Communication as Factor Node
5. Key Challenges and Possible Approaches
5.1. Exploration
- Probabilistic description of PDE by factor graphs: How to describe the PDE model in a Bayesian framework and conduct inference using FGs?
- Process prediction for exploitation: How to design a “communication-aware” exploration objective to determine new measurement positions for the agents?
5.1.1. Probabilistic Description of PDE by Factor Graphs
5.1.2. Process Prediction for Exploitation
5.2. Semantic Communication
- Exploration integration: How can the meaning of exploration variables be exploited in communications when using tools of probabilistic learning?
- Exploration interface design: Which information should be passed to the exploration to reflect the uncertainty or reliability of communication, and how can we design this output by using tools from probabilistic learning?
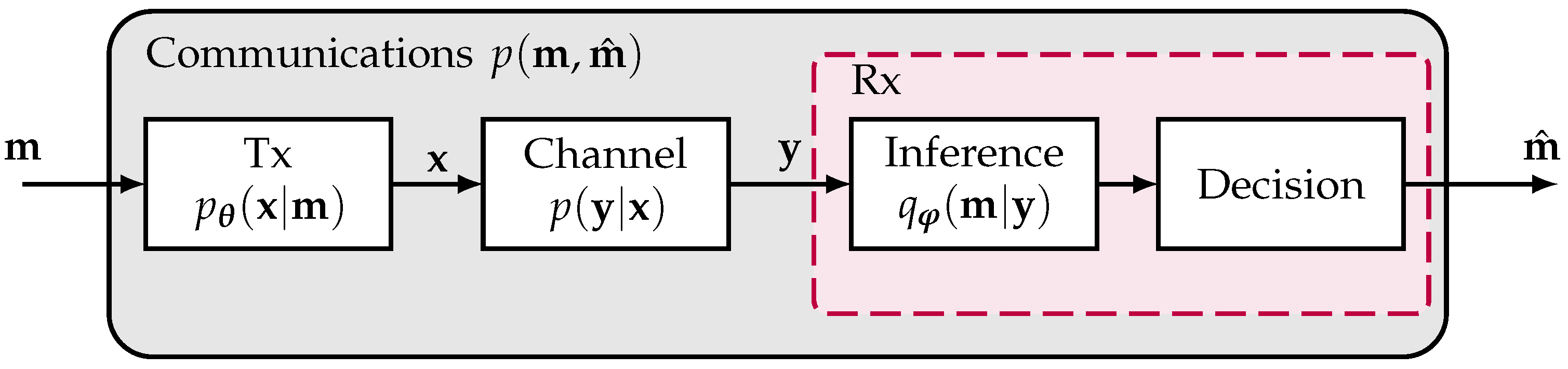
5.2.1. Model Selection
5.2.2. Learning of the Semantic Communication System
- We replace the text with the messages .
- The objective in [11] is to reconstruct (sentences) as accurately as possible while preserving as much information of in . Optimization is done w.r.t. to a loss function consisting of two parts: Cross entropy between language input and output , as well as an additional scaled mutual information term between transmit signal , and received signal . We omit the latter in our approach (12).
5.2.3. Interface to the Application
5.3. First Numerical Example: Semantic Receiver
5.3.1. Exploration Scenario and Data
5.3.2. Transmission Model
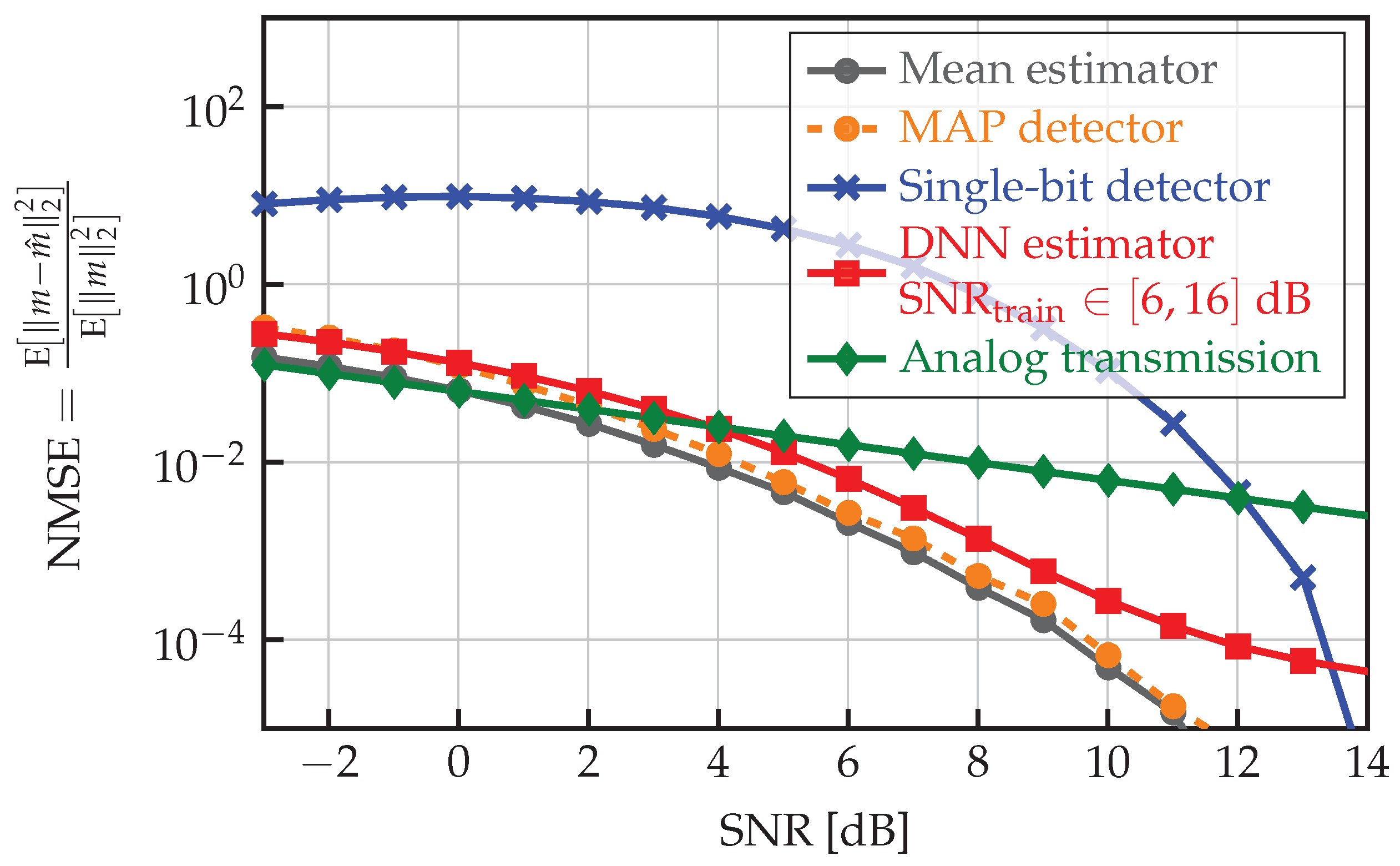
5.3.3. Methodology
- MAP detection: Optimal for error-free transmission of bit sequences , since error rate is minimized.
- Mean estimator: Optimal for estimation of semantics m in the MSE sense.
- Single-bit detector: As usually assumed in classic digital communications, every bit is considered stochastically independent, i.e., , and detected separately. We assume that the prior probability of every single-bit is known. Subsequently, we estimate .
- Analog transmission: Analog transmission of m over the AWGN channel is used as a reference curve. We assume power-normalized channel uses with subsequent averaging for a fair comparison.
- DNN estimator: For approximate estimation, we set the mean of a Gaussian approximate posterior to a small DNN with input , 2 dense intermediate ReLU layers of width and a linear output layer for estimation of m. We take the mean, i.e., the output of the DNN, as the estimate .
5.3.4. Results
5.3.5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AE | Auto Encoder |
| AI | Artificial Intelligence |
| ADMM | Alternating Directions Method of Multipliers |
| AWGN | Additive White Gaussian Noise |
| BPSK | Binary Phase Shift Keying |
| DNN | Deep Neural Network |
| FDM | Finite-Difference Methods |
| FEM | Finite Element Methods |
| FG | Factor Graph |
| GPU | Graphics Processing Unit |
| JSCC | Joint Source-Channel Coding |
| MAP | Maximum A-Posteriori |
| MIMO | Multiple Input Multiple Output |
| ML | Machine Learning |
| MSE | Mean Square Error |
| NMSE | Normalized Mean Square Error |
| PDE | Partial Differential Equation |
| probability density function | |
| RL | Reinforcement Learning |
| SNR | Signal-to-Noise Ratio |
References
- Burgués, J.; Marco, S. Environmental chemical sensing using small drones: A review. Sci. Total Environ. 2020, 748, 141172. [Google Scholar] [CrossRef] [PubMed]
- Tzoumas, G.; Pitonakova, L.; Salinas, L.; Scales, C.; Richardson, T.; Hauert, S. Wildfire detection in large-scale environments using force-based control for swarms of UAVs. Swarm Intell. 2022, 17, 89–115. [Google Scholar] [CrossRef]
- Wiedemann, T.; Manss, C.; Shutin, D. Multi-agent exploration of spatial dynamical processes under sparsity constraints. Auton. Agents Multi-Agent Syst. 2018, 32, 134–162. [Google Scholar] [CrossRef]
- Viseras, A. Distributed Multi-Robot Exploration under Complex Constraints. Ph.D. Thesis, Universidad Pablo de Olavide, Seville, Spain, 2018. [Google Scholar]
- Popovski, P.; Simeone, O.; Boccardi, F.; Gündüz, D.; Sahin, O. Semantic-Effectiveness Filtering and Control for Post-5G Wireless Connectivity. J. Indian Inst. Sci. 2020, 100, 435–443. [Google Scholar] [CrossRef]
- Calvanese Strinati, E.; Barbarossa, S. 6G networks: Beyond Shannon towards semantic and goal-oriented communications. Comput. Netw. 2021, 190, 107930. [Google Scholar] [CrossRef]
- Lan, Q.; Wen, D.; Zhang, Z.; Zeng, Q.; Chen, X.; Popovski, P.; Huang, K. What is Semantic Communication? A View on Conveying Meaning in the Era of Machine Intelligence. J. Commun. Inf. Netw. 2021, 6, 336–371. [Google Scholar] [CrossRef]
- Uysal, E.; Kaya, O.; Ephremides, A.; Gross, J.; Codreanu, M.; Popovski, P.; Assaad, M.; Liva, G.; Munari, A.; Soret, B.; et al. Semantic Communications in Networked Systems: A Data Significance Perspective. IEEE/ACM Trans. Netw. 2022, 36, 233–240. [Google Scholar] [CrossRef]
- Gündüz, D.; Qin, Z.; Aguerri, I.E.; Dhillon, H.S.; Yang, Z.; Yener, A.; Wong, K.K.; Chae, C.B. Beyond Transmitting Bits: Context, Semantics, and Task-Oriented Communications. IEEE J. Sel. Areas Commun. 2023, 41, 5–41. [Google Scholar] [CrossRef]
- Parr, T.; Pezzulo, G.; Friston, K.J. Active Inference: The Free Energy Principle in Mind, Brain, and Behavior; The MIT Press: Cambridge, MA, USA, 2022. [Google Scholar] [CrossRef]
- Xie, H.; Qin, Z.; Li, G.Y.; Juang, B.H. Deep Learning Enabled Semantic Communication Systems. IEEE Trans. Signal Process. 2021, 69, 2663–2675. [Google Scholar] [CrossRef]
- Schizas, I.D.; Mateos, G.; Giannakis, G.B. Distributed LMS for consensus-based in-network adaptive processing. IEEE Trans. Signal Process. 2009, 57, 2365–2382. [Google Scholar] [CrossRef]
- Kar, S.; Moura, J.M. Distributed consensus algorithms in sensor networks with imperfect communication: Link failures and channel noise. IEEE Trans. Signal Process. 2008, 57, 355–369. [Google Scholar] [CrossRef]
- Pereira, S.S. Distributed Consensus Algorithms for Wireless Sensor Networks: Convergence Analysis and Optimization. Ph.D. Thesis, Universitat Politècnica de Catalunya-Barcelona Tech, Barcelona, Spain, 2012. [Google Scholar]
- Talebi, S.P.; Werner, S. Distributed Kalman Filtering and Control Through Embedded Average Consensus Information Fusion. IEEE Trans. Autom. Control 2019, 64, 4396–4403. [Google Scholar] [CrossRef]
- Wang, S.; Shin, B.S.; Shutin, D.; Dekorsy, A. Diffusion Field Estimation Using Decentralized Kernel Kalman Filter with Parameter Learning over Hierarchical Sensor Networks. In Proceedings of the IEEE MLSP, Espoo, Finland, 21–24 September 2020. [Google Scholar]
- Shin, B.S.; Shutin, D. Distributed blind deconvolution of seismic signals under sparsity constraints in sensor networks. In Proceedings of the IEEE International Workshop on Machine Learning for Signal Processing, MLSP, Espoo, Finland, 21–24 September 2020. [Google Scholar] [CrossRef]
- Shutin, D.; Shin, B.S. Variational Bayesian Learning for Decentralized Blind Deconvolution of Seismic Signals Over Sensor Networks. IEEE Access 2021, 9, 164316–164330. [Google Scholar] [CrossRef]
- Boyd, S.; Parikh, N.; Chu, E. Distributed Optimization and Statistical Learning via the Alternating Direction Method of Multipliers; Now Publishers Inc.: Delft, The Netherlands, 2011. [Google Scholar]
- Sayed, A.H. Adaptation, learning, and optimization over networks. Found. Trends Mach. Learn. 2014, 7, 311–801. [Google Scholar] [CrossRef]
- Shin, B.S.; Yukawa, M.; Cavalcante, R.L.G.; Dekorsy, A. Distributed adaptive learning with multiple kernels in diffusion networks. IEEE Trans. Signal Process. 2018, 66, 5505–5519. [Google Scholar] [CrossRef]
- Shin, B.S.; Shutin, D. Adapt-then-combine full waveform inversion for distributed subsurface imaging in seismic networks. In Proceedings of the ICASSP, IEEE International Conference on Acoustics, Speech and Signal Processing—Proceedings, 2021, Toronto, ON, Canada, 6–11 June 2021; pp. 4700–4704. [Google Scholar] [CrossRef]
- Shin, B.S.; Shutin, D. Distributed Traveltime Tomography Using Kernel-based Regression in Seismic Networks. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Fichtner, A. Full Seismic Waveform Modelling and Inversion; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar] [CrossRef]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Loeliger, H.A. An introduction to factor graphs. IEEE Signal Process. Mag. 2004, 21, 28–41. [Google Scholar] [CrossRef]
- Kschischang, F.R.; Frey, B.J.; Loeliger, H.A. Factor graphs and the sum-product algorithm. IEEE Trans. Inf. Theory 2001, 47, 498–519. [Google Scholar] [CrossRef]
- Wang, J.; Zabaras, N. Hierarchical Bayesian models for inverse problems in heat conduction. Inverse Probl. 2004, 21, 183. [Google Scholar] [CrossRef]
- Pukelsheim, F. Optimal Design of Experiments; SIAM: Philadelphia, PA, USA, 2006. [Google Scholar]
- Viseras, A.; Shutin, D.; Merino, L. Robotic active information gathering for spatial field reconstruction with rapidly-exploring random trees and online learning of Gaussian processes. Sensors 2019, 19, 1016. [Google Scholar] [CrossRef]
- Julian, B.J.; Angermann, M.; Schwager, M.; Rus, D. Distributed robotic sensor networks: An information-theoretic approach. Int. J. Robot. Res. 2012, 31, 1134–1154. [Google Scholar] [CrossRef]
- Hüttenrauch, M.; Šošić, A.; Neumann, G. Deep Reinforcement Learning for Swarm Systems. J. Mach. Learn. Res. 2019, 20, 1–31. [Google Scholar]
- Zhu, X.; Zhang, F.; Li, H. Swarm Deep Reinforcement Learning for Robotic Manipulation. Procedia Comput. Sci. 2022, 198, 472–479. [Google Scholar] [CrossRef]
- Kakish, Z.; Elamvazhuthi, K.; Berman, S. Using Reinforcement Learning to Herd a Robotic Swarm to a Target Distribution. In Distributed Autonomous Robotic Systems, Proceedings of the 15th International Symposium, Brussels, Belgium, 19–24 September 2022; Springer International Publishing: Berlin, Germany, 2022; pp. 401–414. [Google Scholar]
- Schizas, I.D.; Ribeiro, A.; Giannakis, G.B. Consensus in ad hoc WSNs with noisy links—Part I: Distributed estimation of deterministic signals. IEEE Trans. Signal Process. 2008, 56, 350–364. [Google Scholar] [CrossRef]
- Zhao, X.; Tu, S.; Sayed, A. Diffusion Adaptation over Networks Under Imperfect Information Exchange and Non-Stationary Data. IEEE Trans. Signal Process. 2012, 60, 3460–3475. [Google Scholar] [CrossRef]
- Shannon, C.E. A Mathematical Theory of Communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- Simeone, O. A Very Brief Introduction to Machine Learning with Applications to Communication Systems. IEEE Trans. Cogn. Commun. Netw. 2018, 4, 648–664. [Google Scholar] [CrossRef]
- O’Shea, T.; Hoydis, J. An Introduction to Deep Learning for the Physical Layer. IEEE Trans. Cogn. Commun. Netw. 2017, 3, 563–575. [Google Scholar] [CrossRef]
- Gruber, T.; Cammerer, S.; Hoydis, J.; Brink, S.t. On deep learning-based channel decoding. In Proceedings of the 51st Annual Conference on Information Sciences and Systems (CISS 2017), Baltimore, MD, USA, 22–24 March 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Monga, V.; Li, Y.; Eldar, Y.C. Algorithm Unrolling: Interpretable, Efficient Deep Learning for Signal and Image Processing. IEEE Signal Process. Mag. 2021, 38, 18–44. [Google Scholar] [CrossRef]
- Balatsoukas-Stimming, A.; Studer, C. Deep Unfolding for Communications Systems: A Survey and Some New Directions. In Proceedings of the IEEE International Workshop on Signal Processing Systems (SiPS 2019), Nanjing, China, 20–23 October 2019; pp. 266–271. [Google Scholar] [CrossRef]
- Farsad, N.; Shlezinger, N.; Goldsmith, A.J.; Eldar, Y.C. Data-Driven Symbol Detection Via Model-Based Machine Learning. In Proceedings of the 2021 IEEE Statistical Signal Processing Workshop (SSP), Rio de Janeiro, Brazil, 11–14 July 2021; pp. 571–575. [Google Scholar] [CrossRef]
- Beck, E.; Bockelmann, C.; Dekorsy, A. CMDNet: Learning a Probabilistic Relaxation of Discrete Variables for Soft Detection with Low Complexity. IEEE Trans. Commun. 2021, 69, 8214–8227. [Google Scholar] [CrossRef]
- Gracla, S.; Beck, E.; Bockelmann, C.; Dekorsy, A. Robust Deep Reinforcement Learning Scheduling via Weight Anchoring. IEEE Commun. Lett. 2023, 27, 210–213. [Google Scholar] [CrossRef]
- Weaver, W. Recent Contributions to the Mathematical Theory of Communication. In The Mathematical Theory of Communication; The University of Illinois Press: Champaign, IL, USA, 1949; Volume 10, pp. 261–281. [Google Scholar]
- Carnap, R.; Bar-Hillel, Y. An Outline of a Theory of Semantic Information; Research Laboratory of Electronics, Massachusetts Institute of Technology: Cambridge, MA, USA, 1952; p. 54. [Google Scholar]
- Bao, J.; Basu, P.; Dean, M.; Partridge, C.; Swami, A.; Leland, W.; Hendler, J.A. Towards a theory of semantic communication. In Proceedings of the 2011 IEEE Network Science Workshop, New York, NY, USA, 22–24 June 2011; pp. 110–117. [Google Scholar] [CrossRef]
- Beck, E.; Bockelmann, C.; Dekorsy, A. Semantic Information Recovery in Wireless Networks. arXiv 2023, arXiv:2204.13366. [Google Scholar]
- Basu, P.; Bao, J.; Dean, M.; Hendler, J. Preserving quality of information by using semantic relationships. Pervasive Mob. Comput. 2014, 11, 188–202. [Google Scholar] [CrossRef]
- Farsad, N.; Rao, M.; Goldsmith, A. Deep Learning for Joint Source-Channel Coding of Text. In Proceedings of the 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, AB, Canada, 15–20 April 2018; pp. 2326–2330. [Google Scholar] [CrossRef]
- Weng, Z.; Qin, Z.; Li, G.Y. Semantic Communications for Speech Signals. In Proceedings of the 2021 IEEE International Conference on Communications (ICC), Montreal, QC, Canada, 14–18 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Sana, M.; Strinati, E.C. Learning Semantics: An Opportunity for Effective 6G Communications. In Proceedings of the 2022 IEEE 19th Annual Consumer Communications Networking Conference (CCNC), Las Vegas, NV, USA, 8–11 January 2022; pp. 631–636. [Google Scholar] [CrossRef]
- Bourtsoulatze, E.; Kurka, D.B.; Gündüz, D. Deep Joint Source-Channel Coding for Wireless Image Transmission. IEEE Trans. Cogn. Commun. Netw. 2019, 5, 567–579. [Google Scholar] [CrossRef]
- Wiedemann, T.; Shutin, D.; Lilienthal, A.J. Model-based gas source localization strategy for a cooperative multi-robot system—A probabilistic approach and experimental validation incorporating physical knowledge and model uncertainties. Robot. Auton. Syst. 2019, 118, 66–79. [Google Scholar] [CrossRef]
- Winn, J.; Bishop, C. Variational message passing. J. Mach. Learn. 2005, 6, 661–694. [Google Scholar]
- Woltering, M.; Wübben, D.; Dekorsy, A. Factor graph-based equalization for two-way relaying with general multi-carrier transmissions. IEEE Trans. Wirel. Commun. 2017, 17, 1212–1225. [Google Scholar] [CrossRef]
- Beck, E.; Bockelmann, C.; Dekorsy, A. Compressed Edge Spectrum Sensing: Extensions and Practical Considerations. at-Automatisierungstechnik 2019, 67, 51–59. [Google Scholar] [CrossRef]
- Simeone, O. A Brief Introduction to Machine Learning for Engineers. Found. Trends® Signal Process. 2018, 12, 200–431. [Google Scholar] [CrossRef]
- Chukkala, V.; DeLeon, P.; Horan, S.; Velusamy, V. Radio frequency channel modeling for proximity networks on the Martian surface. Comput. Netw. 2005, 47, 751–763. [Google Scholar] [CrossRef]
- Zhang, S. Autonomous Swarm Navigation. Ph.D. Thesis, University of Kiel, Kiel, Germany, 2020. [Google Scholar]
- Vincent, P.; Larochelle, H.; Lajoie, I.; Bengio, Y.; Manzagol, P.A. Stacked Denoising Autoencoders: Learning Useful Representations in a Deep Network with a Local Denoising Criterion. J. Mach. Learn. Res. 2010, 11, 3371–3408. [Google Scholar]
- Stark, M.; Aoudia, F.A.; Hoydis, J. Joint Learning of Geometric and Probabilistic Constellation Shaping. In Proceedings of the 2019 IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Cammerer, S.; Aoudia, F.A.; Dörner, S.; Stark, M.; Hoydis, J.; Brink, S. Trainable Communication Systems: Concepts and Prototype. IEEE Trans. Commun. 2020, 68, 5489–5503. [Google Scholar] [CrossRef]
- Jiang, Z.; He, Z.; Chen, S.; Molisch, A.F.; Zhou, S.; Niu, Z. Inferring Remote Channel State Information: Cramér-Rao Lower Bound and Deep Learning Implementation. In Proceedings of the IEEE GLOBECOM, Abu Dhabi, United Arab Emirates, 9–13 December 2018. [Google Scholar]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Beck, E.; Shin, B.-S.; Wang, S.; Wiedemann, T.; Shutin, D.; Dekorsy, A. Swarm Exploration and Communications: A First Step towards Mutually-Aware Integration by Probabilistic Learning. Electronics 2023, 12, 1908. https://doi.org/10.3390/electronics12081908
Beck E, Shin B-S, Wang S, Wiedemann T, Shutin D, Dekorsy A. Swarm Exploration and Communications: A First Step towards Mutually-Aware Integration by Probabilistic Learning. Electronics. 2023; 12(8):1908. https://doi.org/10.3390/electronics12081908
Chicago/Turabian StyleBeck, Edgar, Ban-Sok Shin, Shengdi Wang, Thomas Wiedemann, Dmitriy Shutin, and Armin Dekorsy. 2023. "Swarm Exploration and Communications: A First Step towards Mutually-Aware Integration by Probabilistic Learning" Electronics 12, no. 8: 1908. https://doi.org/10.3390/electronics12081908
APA StyleBeck, E., Shin, B.-S., Wang, S., Wiedemann, T., Shutin, D., & Dekorsy, A. (2023). Swarm Exploration and Communications: A First Step towards Mutually-Aware Integration by Probabilistic Learning. Electronics, 12(8), 1908. https://doi.org/10.3390/electronics12081908